視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響分析
2017-07-18 11:00:00王興龍周志成曲廣吉
航天器工程 2017年3期
關(guān)鍵詞:機(jī)械
王興龍 周志成 曲廣吉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
?
視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響分析
王興龍 周志成 曲廣吉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
空間機(jī)械臂通過(guò)視覺(jué)伺服測(cè)量其末端與目標(biāo)衛(wèi)星之間的相對(duì)位置和姿態(tài)信息,以此規(guī)劃和控制關(guān)節(jié)運(yùn)動(dòng)軌跡,完成捕獲操作。文章分析了視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響。首先,建立視覺(jué)伺服系統(tǒng)的測(cè)量誤差模型。然后,根據(jù)目標(biāo)衛(wèi)星捕獲控制算法推導(dǎo)了測(cè)量誤差到單步和最終控制誤差的傳遞模型。最后,通過(guò)工程算例仿真,計(jì)算分析了不同測(cè)量誤差對(duì)應(yīng)的相對(duì)位置、姿態(tài)、線速度和角速度的控制精度,給出了指定控制精度所允許的最大測(cè)量誤差范圍。文章研究結(jié)果可為空間機(jī)械臂的測(cè)量和控制精度指標(biāo)設(shè)計(jì)提供參考。
空間機(jī)械臂;目標(biāo)衛(wèi)星捕獲;視覺(jué)測(cè)量誤差;控制精度
1 引言
空間機(jī)械臂動(dòng)力學(xué)與控制技術(shù)[1-2]是航天器在軌服務(wù)體系的核心技術(shù)之一。服務(wù)衛(wèi)星通過(guò)空間機(jī)械臂完成對(duì)目標(biāo)衛(wèi)星的捕獲連接[3],在此基礎(chǔ)上進(jìn)一步實(shí)施故障修復(fù)等在軌服務(wù)操作。為減小目標(biāo)衛(wèi)星捕獲瞬時(shí)的碰撞沖擊,要求實(shí)時(shí)規(guī)劃和控制空間機(jī)械臂的運(yùn)動(dòng)軌跡,實(shí)現(xiàn)機(jī)械臂末端對(duì)目標(biāo)衛(wèi)星捕獲接口的相對(duì)位置姿態(tài)同步跟蹤。對(duì)于自主控制方式[4],空間機(jī)械臂通過(guò)視覺(jué)伺服實(shí)時(shí)采集目標(biāo)衛(wèi)星圖像信息,輸入其控制系統(tǒng)形成閉環(huán)反饋控制,因而視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的控制精度具有重要影響。
目前,國(guó)內(nèi)外在空間機(jī)械臂視覺(jué)伺服和目標(biāo)衛(wèi)星捕獲控制方面已有較多研究。文獻(xiàn)[5-6]中討論了基于位置和基于圖像的2種視覺(jué)伺服系統(tǒng),給出了各自的圖像解算方法和優(yōu)缺點(diǎn)比較。文獻(xiàn)[7-8]中推導(dǎo)了空間機(jī)械臂運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)方程,文獻(xiàn)[9-12]中研究了空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的軌跡規(guī)劃和控制方法。在視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂控制精度的影響方面,國(guó)內(nèi)外研究工作則相對(duì)較少。文獻(xiàn)[13-14]中對(duì)視覺(jué)測(cè)量誤差進(jìn)行了理論建模與分析,但沒(méi)有與控制系統(tǒng)結(jié)合研究,缺少測(cè)量誤差到控制誤差的傳遞影響分析。
本文從工程角度出發(fā),研究視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響,建立視覺(jué)測(cè)量誤差模型和誤差傳遞模型。通過(guò)工程算例仿真,定量分析測(cè)量誤差對(duì)控制精度的影響,給出指定控制精度所允許的最大測(cè)量誤差范圍,為空間機(jī)械臂測(cè)量和控制精度指標(biāo)設(shè)計(jì)提供參考。
2 視覺(jué)測(cè)量誤差模型


圖1 空間機(jī)械臂捕獲目標(biāo)衛(wèi)星示意Fig.1 Illustration of space manipulator for capturing a target satellite

圖2 空間機(jī)械臂捕獲目標(biāo)衛(wèi)星整體控制結(jié)構(gòu)框圖Fig.2 Control scheme diagram of space manipulator for capturing a target satellite
從圖2可以看出,視覺(jué)伺服作為整個(gè)規(guī)劃和控制系統(tǒng)的輸入,其測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的控制精度具有重要影響。定義δr,δe分別為相對(duì)位置和相對(duì)姿態(tài)的測(cè)量誤差,則
(1)

定義Δr,Δe分別為相對(duì)位置和相對(duì)姿態(tài)的測(cè)量誤差限,即
(2)
定義R為空間機(jī)械臂視覺(jué)相機(jī)與目標(biāo)衛(wèi)星靶標(biāo)之間的相對(duì)距離。根據(jù)視覺(jué)伺服系統(tǒng)特點(diǎn),Δr,Δe與R成正比。定義δr,0,δe,0分別為單位距離處(R=1 m)的相對(duì)位置和相對(duì)姿態(tài)測(cè)量誤差限,則任意距離R處的測(cè)量誤差限為
(3)
式中:Rmin為空間機(jī)械臂捕獲目標(biāo)衛(wèi)星時(shí),視覺(jué)相機(jī)與靶標(biāo)之間的最小距離,與視覺(jué)相機(jī)和靶標(biāo)的安裝位置有關(guān)。
假設(shè)δr~N(0,σr2),δe~N(0,σe2)分別為均值為零的高斯白噪聲,其中σr,σe分別為相對(duì)位置和相對(duì)姿態(tài)誤差噪聲的標(biāo)準(zhǔn)差。Δr,Δe分別取δr,δe的3σ值,則有σr=Δr/3,σe=Δe/3。
3 測(cè)量誤差到控制誤差的傳遞模型
3.1 測(cè)量誤差到單步控制誤差的傳遞模型
根據(jù)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星規(guī)劃控制算法[9],機(jī)械臂末端對(duì)目標(biāo)衛(wèi)星捕獲接口的相對(duì)線速度v和相對(duì)角速度ω與相對(duì)位置姿態(tài)的傳遞關(guān)系為
(4)
式中:Kv,Kω分別為線速度和角速度增益矩陣,一般為正對(duì)角陣;a為用軸角法表示的機(jī)械臂末端對(duì)目標(biāo)衛(wèi)星捕獲接口的相對(duì)姿態(tài),見(jiàn)式(5)。
(5)
考慮工程實(shí)際情況,空間機(jī)械臂捕獲目標(biāo)衛(wèi)星過(guò)程中的規(guī)劃與控制都是實(shí)時(shí)的。每個(gè)測(cè)量周期內(nèi),視覺(jué)伺服系統(tǒng)都會(huì)對(duì)r,e進(jìn)行測(cè)量更新,并以此重新規(guī)劃和控制當(dāng)前周期的v,ω,相當(dāng)于截?cái)嗔酥八兄芷跍y(cè)量誤差的累積影響,因此從測(cè)量誤差到控制誤差的傳遞關(guān)系是單步形式的。
設(shè)視覺(jué)伺服系統(tǒng)測(cè)量周期為T,變量后添加(k)表示變量在第k周期的取值。由式(4)可知,空間機(jī)械臂線速度和角速度的規(guī)劃控制通道是解耦的,因而有
(6)
式中:S(k)見(jiàn)式(7)。
(7)
式中:sβ=sinβ(k);sγ=sinγ(k);cβ=cosβ(k);cγ=cosγ(k)。
定義εr,εe,εv,εω分別為相對(duì)位置、姿態(tài)、線速度和角速度的單步控制誤差,即
(8)
式中:rd,ed,vd,ωd分別為相對(duì)位置、姿態(tài)、線速度和角速度的期望值;εx,εy,εz為εr在慣性坐標(biāo)系中的分量;εα,εβ,εγ為εe在慣性坐標(biāo)系中的分量;εv,x,εv,y,εv,z為εv在慣性坐標(biāo)系中的分量;εω,x,εω,y,εω,z為εω在慣性坐標(biāo)系中的分量。
將式(1)和式(8)代入式(6),進(jìn)行線性化處理并忽略高階小量,推導(dǎo)得到測(cè)量誤差對(duì)單步控制誤差的傳遞方程為
(9)
式中:P(k)和Q(k)見(jiàn)式(10)和式(11)。
(10)
(11)
式中:sα=sinα(k);cα=cosα(k);sα+γ=sin(α(k)+γ(k));cα+γ=cos(α(k)+γ(k))。
3.2 測(cè)量誤差到最終控制誤差的傳遞模型
空間機(jī)械臂捕獲目標(biāo)衛(wèi)星規(guī)劃控制的最終目的是實(shí)現(xiàn)機(jī)械臂末端對(duì)目標(biāo)衛(wèi)星捕獲接口的相對(duì)位置姿態(tài)同步跟蹤,以減小捕獲時(shí)的碰撞沖擊。最終捕獲時(shí)刻tf的r(tf),e(tf),v(tf),ω(tf)反映了空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的最終控制精度。定義r,v,ω的3軸合成誤差和e的單軸極限誤差分別為其最終控制精度評(píng)價(jià)指標(biāo):εnor(r)=‖r‖2,εnor(v)=‖v‖2,εnor(e)=‖e‖∞,εnor(ω)=‖ω‖2。其中,‖·‖∞和‖·‖2分別為向量的∞-范數(shù)和2-范數(shù)。視覺(jué)測(cè)量誤差δr,δe與最終控制誤差εnor(r),εnor(v),εnor(e),εnor(ω)之間并無(wú)顯式的傳遞關(guān)系,其影響需通過(guò)整個(gè)捕獲過(guò)程的規(guī)劃控制仿真分析得到。
4 測(cè)量誤差對(duì)控制精度影響分析
4.1 工程算例
以具體工程算例進(jìn)行仿真,分析視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響。服務(wù)衛(wèi)星和目標(biāo)衛(wèi)星設(shè)定采用成熟型號(hào)衛(wèi)星平臺(tái),星本體坐標(biāo)系OsXsYsZs和OtXtYtZt定義如圖1所示。空間機(jī)械臂設(shè)定為7自由度剛性機(jī)械臂,整體構(gòu)型與“國(guó)際空間站”遙控機(jī)械臂系統(tǒng)(SSRMS)類似。機(jī)械臂坐標(biāo)系采用傳統(tǒng)D-H建模方法,如圖3所示。其中:臂桿i坐標(biāo)系{i}的軸zi沿關(guān)節(jié)i+1軸線方向;原點(diǎn)oi位于軸zi-1和軸zi的公垂線與軸zi的交點(diǎn);軸xi沿軸zi-1和軸zi的公垂線方向,由關(guān)節(jié)i指向關(guān)節(jié)i+1。機(jī)械臂D-H參數(shù)如表1所示。其中:θi為軸xi-1與軸xi之間的夾角,繞軸zi-1逆時(shí)針轉(zhuǎn)動(dòng)為正;αi為軸zi-1與軸zi之間的夾角,繞軸xi逆時(shí)針轉(zhuǎn)動(dòng)為正;ai為軸zi-1與軸zi之間的距離;di為軸xi-1與軸xi之間的距離[15]。機(jī)械臂動(dòng)力學(xué)參數(shù)如表2所示。

圖3 7自由度空間機(jī)械臂D-H坐標(biāo)系Fig.3 D-H frames of 7-dof space manipulator

表1 空間機(jī)械臂D-H參數(shù)

表2 空間機(jī)械臂動(dòng)力學(xué)參數(shù)

4.2 測(cè)量誤差對(duì)單步控制精度影響分析
令單位距離處(R=1 m)的相對(duì)位置和相對(duì)姿態(tài)測(cè)量誤差限分別為δr,0=0.1 m和δe,0=1.0°。根據(jù)本文建立的視覺(jué)測(cè)量誤差模型,在MATLAB軟件中生成標(biāo)準(zhǔn)差隨距離變化的高斯噪聲,模擬相對(duì)位置和相對(duì)姿態(tài)測(cè)量誤差δr,δe,并將其疊加到視覺(jué)伺服系統(tǒng)測(cè)量輸出的相對(duì)位置和相對(duì)姿態(tài)r,e上,進(jìn)行空間機(jī)械臂捕獲目標(biāo)衛(wèi)星規(guī)劃控制仿真。仿真過(guò)程中實(shí)時(shí)計(jì)算輸出相對(duì)位置、姿態(tài)、線速度和角速度的單步控制誤差εr,εe,εv,εω,用以分析驗(yàn)證本文推導(dǎo)的單步誤差傳遞模型。
仿真得到的相對(duì)位置測(cè)量誤差δr和相對(duì)姿態(tài)測(cè)量誤差δe各坐標(biāo)分量分別如圖4(a)和圖4(b)所示。從圖4中可以看出,由于目標(biāo)衛(wèi)星捕獲過(guò)程中相對(duì)距離R隨時(shí)間遞減,因而δr和δe也隨時(shí)間遞減,在捕獲時(shí)刻t=16~18 s,δr和δe的誤差范圍分別不超過(guò)0.01m和0.1°,符合工程實(shí)際情況。
仿真得到的相對(duì)位置單步控制誤差εr和相對(duì)姿態(tài)單步控制誤差εe各坐標(biāo)分量分別如圖5(a)和圖5(b)所示,相對(duì)線速度單步控制誤差εv和相對(duì)角速度單步控制誤差εω分別如圖6(a)和圖6(b)所示。可以看出,εr和εe分別與δr和δe同量級(jí),且都隨時(shí)間同步遞減。這是因?yàn)闇y(cè)量周期較短(T=0.1 s),εv和εω的時(shí)間積分效果不明顯,符合單步誤差傳遞模型式(9)。εv和εω量級(jí)明顯小于δr和δe,且εv各分量數(shù)值范圍基本相等,εω各分量數(shù)值范圍相差較大,符合單步誤差傳遞模型式(9)。

圖4 相對(duì)位置和姿態(tài)測(cè)量誤差Fig.4 Measurement errors of relative position and attitude

圖5 相對(duì)位置和姿態(tài)單步控制誤差Fig.5 One-step control errors of relative position and attitude
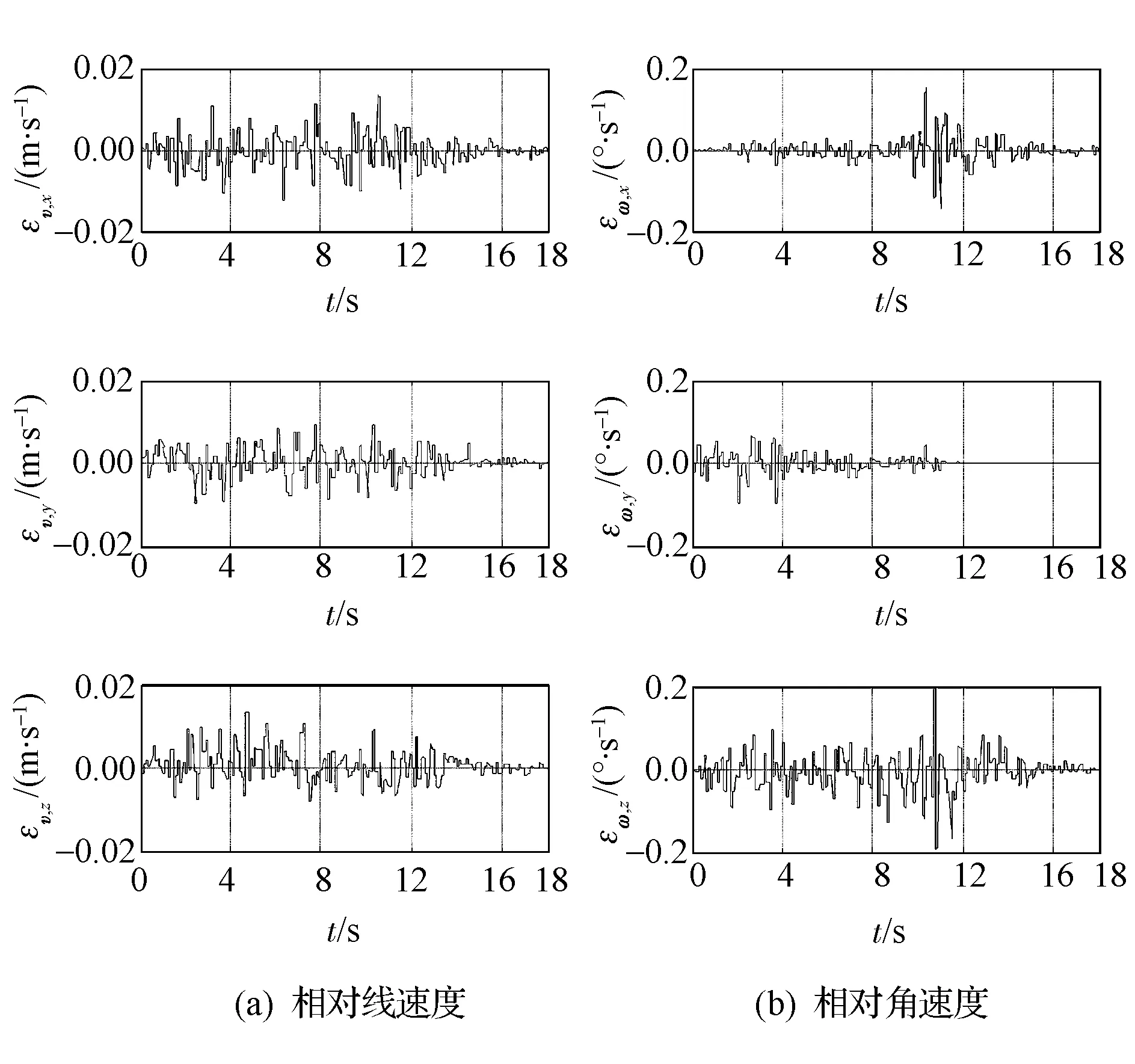
圖6 相對(duì)線速度和角速度單步控制誤差Fig.6 One-step control errors of relative linear velocity and angular velocity
4.3 測(cè)量誤差對(duì)最終控制精度影響分析
由第3.1節(jié)推導(dǎo)過(guò)程可知,速度增益矩陣Kv,Kω為對(duì)角陣,空間機(jī)械臂位置和姿態(tài)的規(guī)劃控制通道是解耦的,相對(duì)位置測(cè)量誤差δr僅影響相對(duì)位置r控制精度和相對(duì)線速度v控制精度。令單位距離處(R=1 m)的相對(duì)位置測(cè)量誤差限δr,0分別為0.00m,0.04m,0.06m,0.08m,進(jìn)行空間機(jī)械臂捕獲目標(biāo)衛(wèi)星規(guī)劃控制仿真,計(jì)算輸出相對(duì)位置最終控制誤差εnor(r)和相對(duì)線速度最終控制誤差εnor(v),仿真結(jié)果分別如圖7和圖8所示。其中,捕獲時(shí)刻t=16~18 s時(shí)的數(shù)值范圍在圖中放大顯示。從圖7和圖8中可以看出,捕獲時(shí)刻t=16~18 s時(shí)的εnor(r)和εnor(v)隨δr,0增大而增大。本文算例中,在不考慮其他誤差情況下,當(dāng)最終控制精度指標(biāo)要求εnor(r)≤0.01 m,εnor(v)≤0.002 m·s-1時(shí),允許的最大相對(duì)位置測(cè)量誤差限δr,0≤0.08 m (R=1 m)。
空間機(jī)械臂相對(duì)姿態(tài)測(cè)量誤差δe僅影響相對(duì)姿態(tài)e控制精度和相對(duì)角速度ω控制精度。令單位距離處(R=1 m)的相對(duì)姿態(tài)測(cè)量誤差限δe,0分別為0.0°,0.5°,1.0°,1.5°,進(jìn)行空間機(jī)械臂捕獲目標(biāo)衛(wèi)星規(guī)劃控制仿真,計(jì)算輸出相對(duì)姿態(tài)最終控制誤差εnor(e)和相對(duì)角速度最終控制誤差εnor(ω),仿真結(jié)果分別如圖9和圖10所示。其中,捕獲時(shí)刻t=16~18 s時(shí)的數(shù)值范圍在圖中放大顯示。從圖9和圖10中可以看出,捕獲時(shí)刻t=16~18 s時(shí)的εnor(e)和εnor(ω)隨δe,0增大而增大。本文算例中,在不考慮其他誤差情況下,當(dāng)最終控制精度指標(biāo)要求εnor(e)≤0.2°,εnor(ω)≤0.04(°)·s-1時(shí),允許的最大相對(duì)姿態(tài)測(cè)量誤差限δe,0≤1.5° (R=1 m)。

圖7 測(cè)量誤差對(duì)相對(duì)位置最終控制精度影響Fig.7 Influence of measurement error on relative position final control precision

圖8 測(cè)量誤差對(duì)相對(duì)線速度最終控制精度影響Fig.8 Influence of measurement error on relative linear velocity final control precision

圖9 測(cè)量誤差對(duì)相對(duì)姿態(tài)最終控制精度影響Fig.9 Influence of measurement error on relative attitude final control precision

圖10 測(cè)量誤差對(duì)相對(duì)角速度最終控制精度影響Fig.10 Influence of measurement error on relative angular velocity final control precision
仿真結(jié)果表明,空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的最終控制誤差隨視覺(jué)測(cè)量誤差增大而增大。采用本文仿真分析方法,可定量得到測(cè)量誤差與控制精度之間的對(duì)應(yīng)關(guān)系,以便為空間機(jī)械臂測(cè)量和控制精度指標(biāo)設(shè)計(jì)提供參考。
5 結(jié)論
本文從工程角度出發(fā),建立了視覺(jué)測(cè)量誤差模型和誤差傳遞模型,通過(guò)數(shù)值仿真定量分析了視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星控制精度的影響,主要得出了以下結(jié)論。
(1)視覺(jué)測(cè)量誤差對(duì)空間機(jī)械臂位置和姿態(tài)控制精度的影響是解耦的,相對(duì)位置測(cè)量誤差δr僅影響相對(duì)位置r控制精度和相對(duì)線速度v控制精度,相對(duì)姿態(tài)測(cè)量誤差δe僅影響相對(duì)姿態(tài)e控制精度和相對(duì)角速度ω控制精度。
(2)空間機(jī)械臂捕獲目標(biāo)衛(wèi)星的最終控制誤差隨視覺(jué)測(cè)量誤差增大而增大。本文算例中,在不考慮其他誤差情況下,指定相對(duì)位置、姿態(tài)、線速度和角速度的控制精度要求分別為εnor(r)≤0.01 m,εnor(e)≤0.2°,εnor(v)≤0.002 m·s-1,εnor(ω)≤0.04(°)·s-1時(shí),允許的最大相對(duì)位置和相對(duì)姿態(tài)測(cè)量誤差限分別為δr,0≤0.08 m和δe,0≤1.5° (R=1 m)。本文研究結(jié)果可為空間機(jī)械臂測(cè)量和控制精度指標(biāo)設(shè)計(jì)提供參考。
)
[1]周志成, 曲廣吉. 通信衛(wèi)星總體設(shè)計(jì)和動(dòng)力學(xué)分析[M]. 北京: 中國(guó)科學(xué)技術(shù)出版社, 2012
ZhouZhicheng,QuGuangji.Systemdesignanddyna-micsanalysisofcommunicationsatellites[M].Beijing:ChinaScienceandTechnologyPress, 2012 (inChinese)
[2]于登云, 孫京, 馬興瑞. 空間機(jī)械臂技術(shù)及發(fā)展建議[J]. 航天器工程, 2007, 16(4): 1-8
YuDengyun,SunJing,MaXingrui.SuggestionondevelopmentofChinesespacemanipulatortechnology[J].SpacecraftEngineering, 2007, 16(4): 1-8 (inChinese)
[3]李新剛, 裴勝偉. 國(guó)內(nèi)外航天器在軌捕獲技術(shù)綜述[J]. 航天器工程, 2013, 22(1): 113-119
LiXingang,PeiShengwei.On-orbitcapturetechnologyofspacecraft[J].SpacecraftEngineering, 2013, 22(1): 113-119 (inChinese)
[4]李大明, 饒煒, 胡成威, 等. 空間站機(jī)械臂關(guān)鍵技術(shù)研究[J]. 載人航天, 2014, 20(3): 238-242
LiDaming,RaoWei,HuChengwei,etal.Keytechnologyreviewoftheresearchonthespacestationmanipulator[J].MannedSpaceflight, 2014, 20(3): 238-242 (inChinese)
[5]InabaN,OdaM,HayashiM.Visualservoingofspacerobotforautonomoussatellitecapture[J].JapanSocietyofAeronauticalSpaceSciencesTransactions, 2004, 46(153): 173-179
[6]ConticelliF,AllottaB.Nonlinearcontrollabilityandstabilityanalysisofadaptiveimage-basedsystems[J].IEEETransactionsonRoboticsandAutomation, 2001, 17(2): 208-214
[7]UmetaniY,YoshidaK.Resolvedmotionratecontrolofspacemanipulatorswithgeneralizedjacobianmatrix[J].IEEETransactionsonRoboticsandAutomation, 1989, 5(3): 303-314
[8]曲廣吉. 航天器動(dòng)力學(xué)工程[M]. 北京: 中國(guó)科學(xué)技術(shù)出版社, 2000
QuGuangji.Spacecraftdynamicsengineering[M].Beijing:ChinaScienceandTechnologyPress, 2000 (inChinese)
[9]徐文福. 空間機(jī)器人目標(biāo)捕獲的路徑規(guī)劃與實(shí)驗(yàn)研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2007
XuWenfu.Pathplanningandexperimentstudyofspacerobotfortargetcapturing[D].Harbin:HarbinInstituteofTechnology, 2007 (inChinese)
[10]ShibliM,SuCY,AghiliF.Adaptiveinversedyna-micscontrolofafree-flyingspacerobotincontactwithatargetsatellite:aHubblespacetelescopecase[C]//ProceedingsofCanadianConferenceonElectricalandComputerEngineering.NewYork:IEEE, 2006: 1275-1278
[11]劉金琨. 滑模變結(jié)構(gòu)控制MATLAB仿真: 先進(jìn)控制系統(tǒng)設(shè)計(jì)方法[M]. 北京: 清華大學(xué)出版社, 2015
LiuJinkun.SlidingmodecontroldesignandMATLABsimulation:thedesignmethodofadvancedcontrolsystem[M].Beijing:TsinghuaUniversityPress, 2015 (inChinese)
[12]黃劍斌, 李志. 基于阻抗控制的空間機(jī)械臂接觸控制與軌跡規(guī)劃技術(shù)[J]. 航天器工程, 2013, 22(4): 43-48
HuangJianbin,LiZhi.Spacemanipulatorinteractioncontrolandtrajectorygenerationbasedoncartesianimpedancecontrol[J].SpacecraftEngineering, 2013, 22(4): 43-48 (inChinese)
[13]KimWS,AnsarAL,SteeleRD,etal.Performanceanalysisandvalidationofastereovisionsystem[C]//ProceedingsofIEEEInternationalConferenceonSystems,ManandCybernetics.NewYork:IEEE, 2005: 1409-1416
[14]張鵬煒, 張智詮, 胡磊, 等. 基于針孔模型的雙目視覺(jué)標(biāo)定誤差仿真分析[J]. 電光與控制, 2009, 16(12): 65-69
ZhangPengwei,ZhangZhiquan,HuLei,etal.Calibrationerrorsimulatinganalysisofbinocularvisionbasedonpinholecameramodel[J].ElectronicsOpticsandControl, 2009, 16(12): 65-69 (inChinese)
[15]蔡自興,謝斌.機(jī)器人學(xué)[M].北京:清華大學(xué)出版社,2015
CaiZixing,XieBin.Robotics[M].Beijing:TsinghuaUniversityPress, 2015 (inChinese)
(編輯:夏光)
Influence Analysis of Visual Measurement Errors on Space Manipulator Control Precision for Capturing a Target Satellite
WANG Xinglong ZHOU Zhicheng QU Guangji
(Institute of Telecommunication Satellite, China Academy of Space Technology, Beijing 100094, China)
Space manipulator uses visual servo to measure the relative position and attitude information between its end effector and the target satellite, so as to plan and control its joint motion trajectories to complete the capturing operation. This paper focuses on the influence analysis of visual measurement errors on space manipulator control precision for capturing the target satellite. The measurement error model of visual servo system is established, then, the transfer models from measurement errors to one-step and final control errors are derived on the basis of target satellite capturing control algorithm. The control precision of relative position, attitude, linear velocity and angular velocity corresponding to different measurement errors is calculated by numerical simulations. The maximal measurement errors permitted by the given control precision are presented as conclusions. The results of this paper can provide references for the measurement and control precision design of the space manipulator.
space manipulator; target satellite capturing; visual measurement error; control precision
2017-04-28;
2017-05-22
國(guó)家自然科學(xué)基金(11272334)
王興龍,男,博士研究生,研究方向?yàn)楹教炱骺傮w設(shè)計(jì)、航天器動(dòng)力學(xué)與控制。Email:wangxinglong1987@163.com。
TP241.3
A
10.3969/j.issn.1673-8748.2017.03.005
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09