基于視場角的遙感衛星成像多邊形區域目標動態分解方法
2017-07-18 11:00:03潘耀池忠明饒啟龍羅達
航天器工程 2017年3期
潘耀 池忠明 饒啟龍 羅達
(上海衛星工程研究所,上海 201109)
?
基于視場角的遙感衛星成像多邊形區域目標動態分解方法
潘耀 池忠明 饒啟龍 羅達
(上海衛星工程研究所,上海 201109)
考慮遙感衛星成像任務規劃時對多邊形區域目標的分解問題,提出了一種基于衛星視場角的區域目標動態分解方法。首先根據衛星的軌道特性,計算衛星對區域目標的可見時間窗口;在可見時間窗口內,計算衛星對區域目標的最大、最小有效觀測角度;再以衛星的視場角為角度偏移量,同時考慮幅寬的動態變化,將區域目標分解成相互平行且幅寬不等的條帶。仿真結果表明:文章提出的區域目標動態分解方法,能夠將區域目標有效分解,與傳統的區域目標分解方法相比,可明顯提高遙感衛星對區域目標的觀測效率。研究結果可為遙感衛星自主任務規劃技術研究提供參考。
遙感衛星成像;多邊形區域目標;衛星視場角;動態分解
1 引言
遙感衛星成像任務規劃的目標類型主要有兩類,分別是點目標和區域目標。區域目標的覆蓋范圍較大,衛星單次觀測無法完成覆蓋,必須先將其分解成一組成像條帶集合,再安排衛星對條帶進行觀測。因此,區域目標分解是遙感衛星成像任務規劃中的關鍵環節,分解方法在很大程度上影響了衛星對區域目標的觀測效率。
目前,區域目標的分解方法主要有以下幾種:①基于獨立場景的點目標覆蓋方法[1],依據獨立單景,將區域目標分解轉化為集合覆蓋問題;②基于固定寬度的條帶分解方法[2-3],依據衛星的飛行方向和成像幅寬,將區域目標分解為固定寬度的平行條帶;③基于高斯投影的條帶分解方法[4],利用高斯投影將區域目標從大地坐標系轉換到平面坐標系,在平面坐標系下對目標進行分解,再利用高斯反算將其轉換到大地坐標系下;④基于預定義參考系的單景分解方法,依據定義的全球參考系將區域目標分解為多個獨立的場景。這些分解方法處理的區域目標面積相對較小,對于經度差較大的區域目標分解誤差較大;另外,采用高斯投影的分解方法時,要進行多次高斯投影及反向運算,計算量大,效率低。
針對以上區域目標分解方法的不足,本文提出了一種基于視場角的遙感衛星成像區域目標動態分解方法,可以對多邊形區域目標進行有效地分解,得到衛星的姿態機動指令,并結合算例進行仿真分析。本文的研究結果,可以為遙感衛星自主任務規劃技術研究提供參考。
2 區域目標動態分解方法
在解決多邊形區域目標分解這一問題時,本文參考了文獻[5]和文獻[2]中提出的方法。文獻[5]中設計了一種基于MapX的區域目標動態分解方法,采用立體幾何的方法計算衛星對區域目標的覆蓋范圍,避免了由于高斯投影帶來的巨大計算量,計算效率大大提高;但是,該方法得到的觀測條帶相互重疊,帶來復雜的集合交運算。文獻[2]中依據衛星的飛行方向和遙感器幅寬,將區域目標分解為固定寬度的平行條帶,條帶的寬度為固定值,方向相互平行,條帶之間不存在重疊;但是,該方法沒有考慮條帶幅寬的動態變化。因此,本文將這兩種方法結合起來,設計并實現了一種基于衛星視場角的多邊形區域目標動態分解方法,并做出了如下改進:①按照固定的角度偏移量對區域目標進行分解,且偏移的角度就是衛星的視場角,同時考慮幅寬的動態變化[6];條帶方向與衛星飛行方向平行,條帶之間不存在重復覆蓋的情況,避免復雜的集合交運算,提高衛星對目標的觀測效率。②采用立體幾何的方法來計算觀測條帶的覆蓋范圍,避免高斯投影在大地坐標系與平面坐標系之間的反復變換,提高計算效率。
設待分解的多邊形區域目標集合為T={T1,T2,…,TN},分解后的條帶集合為I={I1,I2,…,IN}。衛星側擺機動角度范圍為±g,衛星遙感器的視場角為Δg。條帶分解時的角度偏移量為Δβ,且滿足Δβ=Δg。衛星對區域目標Ti的時間窗口集合為Wi={wi,1,wi,2,…,wi,m},即第i個區域目標的第m個時間窗口為wi,m。Ii,j,k為衛星在時間窗口wi,j內對區域目標Ti分解得到的第k條觀測條帶。βi,j,k和θi,j,k分別為衛星在時間窗口wi,j內對區域目標Ti分解得到的第k條觀測條帶的側擺角和俯仰角。圖1為本文提出的區域目標動態分解方法流程。
(1)根據衛星的軌道參數[7-9],計算衛星對區域目標Ti的可見時間窗口集合Wi。
(2)遍歷Wi中的每個可見時間窗口wi,j(1≤j≤m),根據每個時間窗口對區域目標Ti進行分解。①計算在時間窗口wi,j內,衛星指向區域目標Ti的觀測角度范圍[10],得到衛星對目標的最大側擺角度gmax(i,j)和最小側擺角度gmin(i,j),最大俯仰角度θmax(i,j)和最小俯仰角度θmin(i,j)。②計算衛星對區域目標Ti的有效觀測最小側擺角度gS(i,j)和最大側擺角度gE(i,j),分別為式(1)和式(2)。③計算分解的條帶數目n=(gE(i,j)-gS(i,j))/Δg,向上取整。按照不同的觀測角度對區域目標進行分解。側擺角βi,j,k從gS(i,j)開始,以Δβ=Δg為角度偏移量,俯仰角θi,j,k以Δθ=(θmax(i,j)-θmin(i,j))/(n-1)為角度偏移量,從θmax(i,j)開始,沿垂直于星下點軌跡的方向進行偏移,直至gE(i,j)結束。④根據衛星對地覆蓋區域的計算方法[6],求得衛星對地覆蓋條帶的頂點坐標,從而得到了分解條帶的坐標信息。⑤計算衛星對區域目標Ti在時間窗口wi,j內分解的條帶集合Ii,j。
(1)
(2)
(3)將衛星對區域目標Ti在各個時間窗口內進行分解,得到條帶集合Ii。
(4)依次分解其他區域目標,得到分解后的條帶集合I={I1,I2,…,IN},分解完畢,返回并輸出結果。
分解后的條帶即為衛星的一個觀測活動,可表示為
Ii,j,k={Ti,k,si,j,k,ei,j,k,βi,j,k,θi,j,k,p}
(3)
式中:p為觀測條帶的坐標信息。
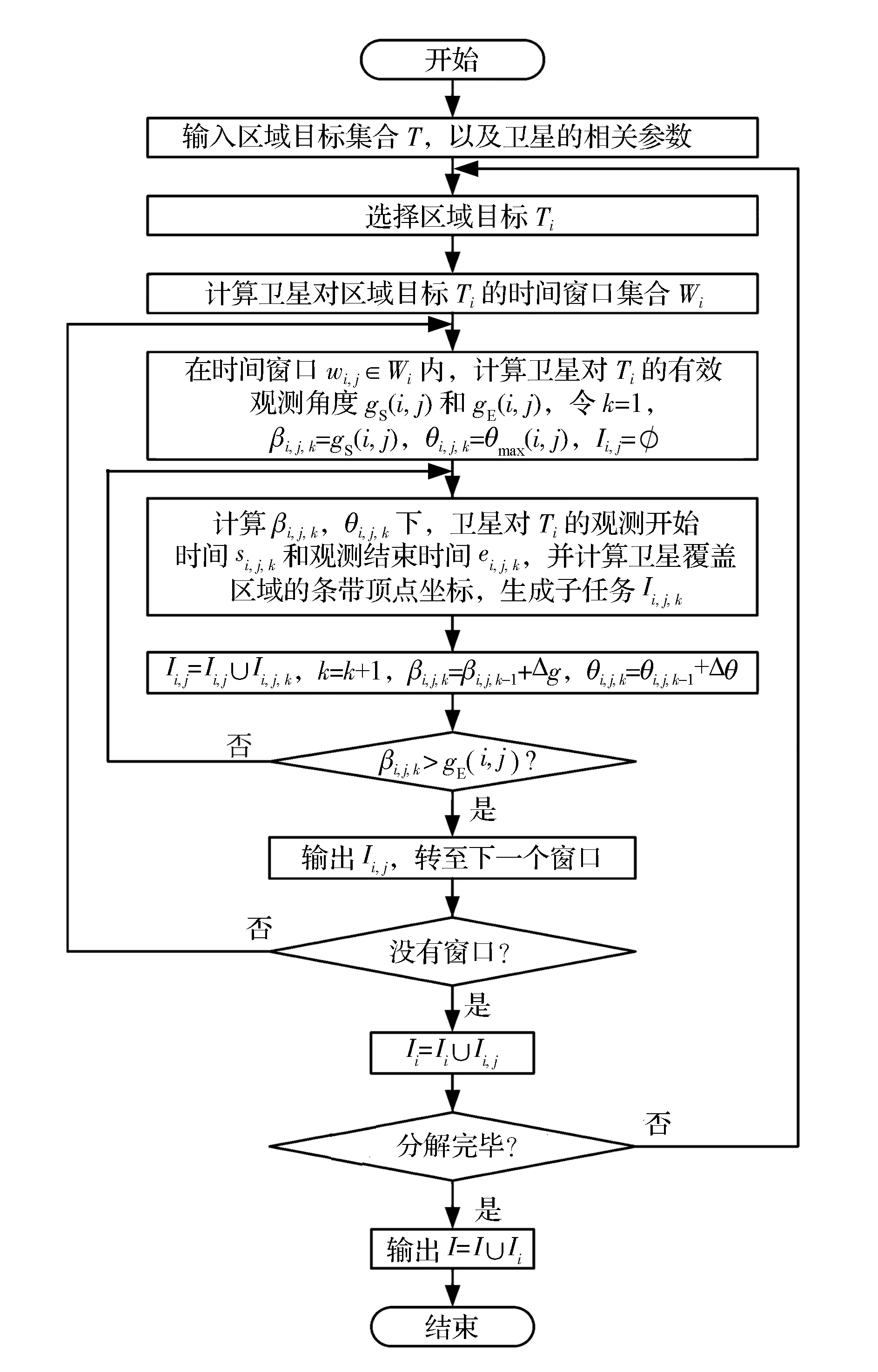
圖1 動態分解方法流程Fig.1 Flow of dynamic segmenting method
3 仿真分析
3.1 仿真條件設定
以我國中部地區某多邊形區域作為研究對象,該區域目標的地理分布位置如圖2所示。該區域目標的經緯度坐標及覆蓋區域面積見表1。仿真中遙感衛星信息見表2。
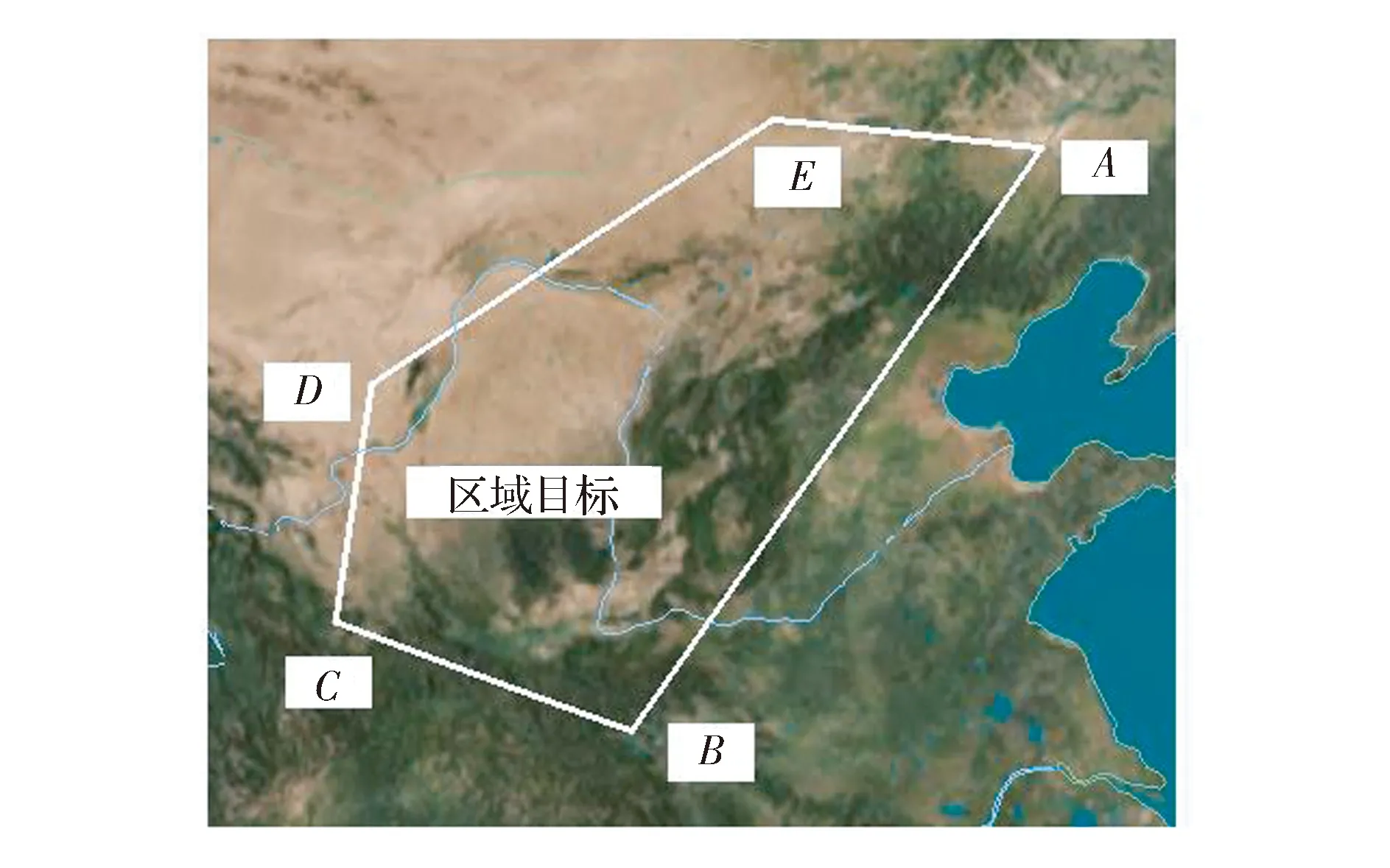
圖2 多邊形區域目標的地理位置Fig.2 Position of polygon target
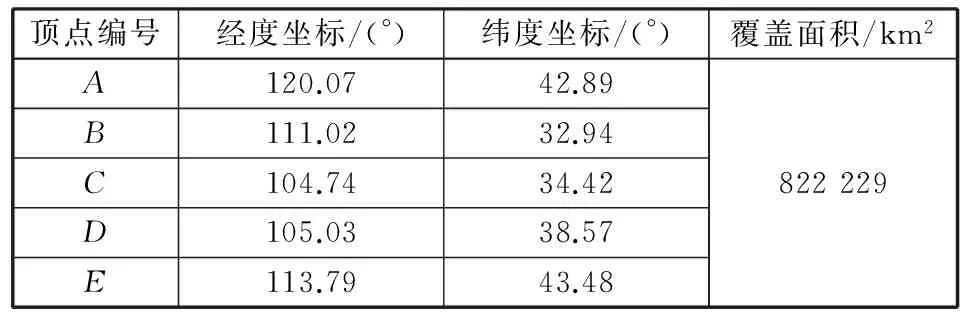
表1 多邊形區域目標信息

表2 遙感衛星信息
考慮單個軌道圈次內的任務規劃問題,選取一個軌道圈次的時間為仿真場景時間。仿真開始時間為2016-03-23T03:41:17(UTCG),仿真結束時間為2016-03-23T05:28:32(UTCG)。利用STK軟件求出衛星對區域目標的可見時間窗口為2016-03-23T04:08:40-04:30:48(UTCG)。
3.2 仿真結果及分析
利用本文中設計的區域目標動態分解方法,在仿真場景時間內對區域目標進行分解,得到了目標在星下點軌跡平面內的分解方案,如圖3所示。由圖3可知,衛星將區域目標分解為3個條帶,基本能夠完全覆蓋區域目標,且各個條帶之間不存在重復覆蓋的情況;各個條帶的寬度不同,且隨著觀測角度的變化而動態變化。各個觀測條帶的信息見表3。依據表3中各個條帶的信息,即可生成衛星對區域目標觀測的姿態機動指令。假設衛星沿著星下點軌跡方向向左側擺為正,向右側擺為負;向前俯仰為正,向后俯仰為負。
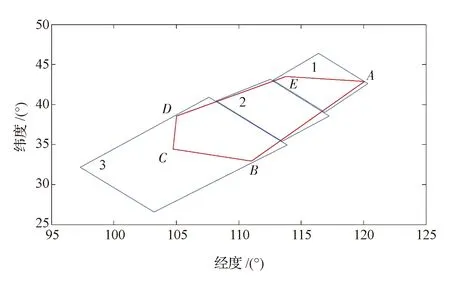
圖3 星下點軌跡平面內多邊形區域目標的動態分解方案Fig.3 Dynamic segmenting scheme of polygon target in sub-track plane

表3 觀測條帶信息
利用STK軟件的覆蓋性分析功能,計算衛星對區域目標的覆蓋率,見表4。
為了驗證本文設計的區域目標動態分解方法的優勢,借助STK軟件采用文獻[2]中固定條帶寬度的分解方法對區域目標進行分解,同時計算衛星對該區域目標的覆蓋率,并將結果與本文的結果進行比較。條帶的寬度取衛星的星下點幅寬。表5為采用固定寬度的方法對區域目標分解得到的條帶信息。其中,剩余視場角為衛星的實際視場角減去衛星的有效視場角。將本文的分解方法與文獻[2]中的方法進行比較,見表6。

表4 衛星對多邊形區域目標的覆蓋率

表5 采用文獻[2]中方法分解得到的條帶信息

表6 本文方法與文獻[2]中方法分解結果比較
從表6中的結果可以發現,本文設計的區域目標分解方法在條帶數目、剩余視場角、總覆蓋率上都優于文獻[2]中的方法。在條帶數目上,本文方法比文獻[2]中的方法要少1個條帶,減小了由于頻繁地機動對載荷可靠性的影響;在剩余視場角上,文獻[2]中的方法,分解的條帶寬度固定,導致衛星的觀測視場有剩余,即有效觀測視場角小于實際的視場角,造成資源浪費,而本文的方法剩余視場角為0°,即不存在視場剩余,提高了衛星的資源利用率;在總覆蓋率上,文獻[2]中的方法分解得到的條帶覆蓋率為83.80%,而本文方法得到的條帶覆蓋率達到了99.54%,比文獻[2]中的方法提高了18.78%,基本能夠完全覆蓋區域目標。由表2可知,仿真中遙感衛星的視場角為16.30°,相對于傳統的衛星來說,視場角較大。本文設計的區域目標動態分解方法,正是利用了衛星大視場的特點,同時考慮成像幅寬的動態變化,分解得到的條帶數目少,條帶覆蓋率高,且條帶之間不存在重復覆蓋的情況,極大地提高了衛星對區域目標的觀測效率。
文獻[11]和文獻[12]中均采用了高斯投影的方法來計算分解條帶的位置信息。可以看出,該方法用到的高斯正算公式和高斯反算公式中均存在大量的逆運算和級數運算,當目標數量較多時,必然帶來巨大的計算量,消耗大量的星載計算資源。而采用立體幾何的方法計算觀測條帶的覆蓋范圍,計算公式中都是簡單的代數運算和反函數運算,計算量小[5]。因此,將本文設計的區域目標分解方法與文獻[5]中觀測條帶的計算方法結合使用,能夠有效地提高遙感衛星任務規劃時對區域目標成像的效率,有利于實現星上的自主任務規劃。
4 結束語
本文設計的基于衛星視場角的區域目標動態分解方法,通過計算在可見時間窗口內衛星對區域目標的最大、最小有效觀測角度,再以衛星的視場角為角度偏移量,將區域目標分解成相互平行且幅寬不同的條帶,最終得到衛星對區域目標成像的姿態機動指令。仿真表明:該方法可以有效地解決大視場衛星對區域目標的分解問題,明顯提高衛星對區域目標的觀測效率,滿足廣域搜索等成像要求;同時,還降低了計算量,有利于實現遙感衛星的自主任務規劃,減少地面對衛星的干預,提高衛星在軌運行的自主管理能力。
References)
[1] Walton J. Models for the management of satellite based sensors [D]. Boston,Massachusetts: Massachusetts Institute of Technology,1993
[2]Lemaitre M,Verfaillie G. Daily management of an earth observation satellite:comparison of ILOG solver with dedicated algorithms for valued constraint satisfaction problems [C/OL]. [2017-04-25]. ftp://ftp.cert.fr/pub/vertfaillie/ILGO-97.ps
[3]余婧,喜進軍,于龍江,等.敏捷衛星同軌多條帶拼幅成像模式研究[J].航天器工程,2015,24(2):27-34
Yu Jing,Xi Jinjun,Yu Longjiang,et al. Study of one-orbit multi-strips splicing imaging for agile satellite [J]. Spacecraft Engineering,2015,24(2):27-34 (in Chinese)
[4]黃瀚.基于成像衛星星座的任務規劃方法研究[D].哈爾濱:哈爾濱工業大學,2014
Huang Han. Research on the mission planning techno-logy of imaging satellite constellation [D]. Harbin:Harbin Institute of Technology,2014 (in Chinese)
[5]白保存.考慮任務合成的成像衛星調度模型與優化算法研究[D].長沙:國防科學技術大學,2008
Bai Baocun. Modeling and optimization algorithms for imaging satellites scheduling problem with task merging [D]. Changsha:National University of Defense Technology,2008 (in Chinese)
[6]郭雷.敏捷衛星調度問題關鍵技術研究[D].武漢:武漢大學,2015
Guo Lei. Research on key problems of agile satellite imaging scheduling problem [D]. Wuhan:Wuhan University,2015 (in Chinese)
[7]張捍衛,許厚澤,王愛生.剛體地球CIP軸的極移和歲差章動[J].大地測量與地球動力學,2005,25(1):65-67
Zhang Hanwei,Xu Houze,Wang Aisheng. Polar migration and nutation of CIP axis of rigid earth [J]. Journal of Geodesy and Geodynamics,2005,25(1):65-67 (in Chinese)
[8]曹華文,李傳榮,李子揚,等.基于J2攝動模型的衛星軌道預測算法精度評估[J].遙感信息,2012,27(6):21-27
Cao Huawen,Li Chuanrong,Li Ziyang,et al. Accuracy assessment of satellite orbit prediction based on J2 perturbation model [J]. Remote Sensing Information,2012,27(6):21-27 (in Chinese)
[9]宋志明,戴光明,王茂才,等.衛星對區域目標的時間窗口快速計算方法[J].計算機仿真,2014,31(9):61-66
Song Zhiming,Dai Guangming, Wang Maocai,et al. Fast predicting algorithm for satellites time windows to ground area target [J]. Computer Simulation,2014,31(9):61-66 (in Chinese)
[10]劉曉東,王鵬,林元,等.敏捷衛星對目標訪問信息的計算方法[J].通信系統與網絡技術,2016,42(5):23-26
Liu Xiaodong,Wang Peng,Lin Yuan,et al. Calculation method for access information of agile satellite on target [J]. Communication System and Network Technology,2016,42(5):23-26 (in Chinese)
[11]潘小彤.敏捷光學成像衛星多目標任務規劃方法研究[D].哈爾濱:哈爾濱工業大學,2013
Pan Xiaotong. Research on the muti-objective scheduling method of the optical imaging agile satellite [D]. Harbin:Harbin Institute of Technology,2013 (in Chinese)
[12]阮啟明.面向區域目標的成像偵察衛星調度問題研究[D].長沙:國防科學技術大學,2006
Ruan Qiming. Research on photo-reconnaissance satellites scheduling problem for area targets observation [D]. Changsha:National University of Defense Technology,2006 (in Chinese)
(編輯:夏光)
Dynamic Segmenting Method of Polygon Target Based on FOVfor Remote Sensing Satellite Imaging
PAN Yao CHI Zhongming RAO Qilong LUO Da
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
Considering the segmenting problem for remote sensing satellite imaging of polygon target, a dynamic segmenting method of polygon target based on satellite FOV is proposed. Firstly,the time windows of polygon target are calculated according to the characteristic of satellite orbit,and then the maximum and minimum effective observing angles of polygon target are confirmed by the time windows. Lastly,considering the dynamic swath,polygon target is segmented into different strips. Simulation results show that the method proposed can improve the observing efficiency of polygon target compared with the traditional method,and can be used as a reference for remote sensing satellite autonomous mission planning.
remote sensing satellite imaging; polygon target; satellite FOV; dynamic segmenting
2017-05-10;
2017-05-17
國家重大航天工程
潘耀,男,碩士研究生,研究方向為衛星總體設計與仿真技術。Email:716069487@qq.com。
V
A
10.3969/j.issn.1673-8748.2017.03.006
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52