北斗全球系統(tǒng)自主導(dǎo)航地面模擬測(cè)試系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2017-07-18 11:00:02賈衛(wèi)松王海紅燕洪成曾連連
航天器工程 2017年3期
賈衛(wèi)松 王海紅 燕洪成 曾連連
(北京空間飛行器總體設(shè)計(jì)部,北京 100094)
?
北斗全球系統(tǒng)自主導(dǎo)航地面模擬測(cè)試系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
賈衛(wèi)松 王海紅 燕洪成 曾連連
(北京空間飛行器總體設(shè)計(jì)部,北京 100094)
針對(duì)北斗高精度自主導(dǎo)航性能指標(biāo)的測(cè)試驗(yàn)證,設(shè)計(jì)了支持北斗全球系統(tǒng)星座的自主導(dǎo)航地面模擬測(cè)試系統(tǒng)。利用標(biāo)準(zhǔn)航天器鏈路通信終端接入星載自主導(dǎo)航計(jì)算機(jī),實(shí)現(xiàn)以遠(yuǎn)程仿真測(cè)試服務(wù)器為核心的模擬測(cè)試系統(tǒng)架構(gòu),從通信機(jī)制、時(shí)間同步策略、結(jié)果評(píng)估方法等方面闡述系統(tǒng)設(shè)計(jì)原理。工程實(shí)踐結(jié)果表明:文章設(shè)計(jì)的自主導(dǎo)航地面模擬測(cè)試系統(tǒng),支持在模擬建鏈場(chǎng)景及誤差源的條件下對(duì)衛(wèi)星自主導(dǎo)航進(jìn)行“跑合”驗(yàn)證,可應(yīng)用于北斗全球組網(wǎng)衛(wèi)星設(shè)計(jì)、測(cè)試及在軌運(yùn)行階段。其設(shè)計(jì)方法對(duì)其它衛(wèi)星自主智能任務(wù)的測(cè)試系統(tǒng)構(gòu)建亦具有借鑒意義。
北斗全球系統(tǒng);自主導(dǎo)航;地面模擬測(cè)試系統(tǒng)
1 引言
高精度自主導(dǎo)航是新一代全球衛(wèi)星導(dǎo)航系統(tǒng)的發(fā)展趨勢(shì),可使導(dǎo)航系統(tǒng)在一段時(shí)期內(nèi)完全脫離地面運(yùn)控系統(tǒng)并繼續(xù)給用戶提供精確導(dǎo)航服務(wù)[1]。1997年后發(fā)射的GPSII-R及后續(xù)GPS衛(wèi)星都具有星間鏈路功能,初步具備自主導(dǎo)航能力。我國(guó)北斗全球系統(tǒng)自主導(dǎo)航通過星間雙向測(cè)距、數(shù)據(jù)交換以及星載處理器濾波處理,不斷修正地面站注入的衛(wèi)星長(zhǎng)期預(yù)報(bào)星歷及時(shí)鐘參數(shù),并自主生成導(dǎo)航電文和維持星座基本構(gòu)型[2],可支持60天在軌自主運(yùn)行[3],增強(qiáng)系統(tǒng)的生存能力。由于空間環(huán)境的影響,星載計(jì)算機(jī)處理器運(yùn)算能力較低,在工程實(shí)現(xiàn)中需要持續(xù)優(yōu)化算法設(shè)計(jì),實(shí)現(xiàn)兼顧輸出電文精度和滿足衛(wèi)星硬件資源的目標(biāo)。自主導(dǎo)航算法的地面驗(yàn)證過程應(yīng)全面考慮影響導(dǎo)航性能的環(huán)境因素和硬件效應(yīng)。目前國(guó)內(nèi)針對(duì)基于星間測(cè)量的自主導(dǎo)航技術(shù)局限于通過軟件仿真進(jìn)行研究與評(píng)估。南京航空航天大學(xué)等針對(duì)基于星間測(cè)量的星座自主導(dǎo)航進(jìn)行研究并實(shí)現(xiàn)仿真系統(tǒng)[4],但其僅利用局域網(wǎng)通信的計(jì)算機(jī)仿真出星座自主導(dǎo)航系統(tǒng)的運(yùn)行過程,不具備與真實(shí)衛(wèi)星設(shè)備的對(duì)接及系統(tǒng)驗(yàn)證能力。基于星間測(cè)量的自主導(dǎo)航在衛(wèi)星物理實(shí)物平臺(tái)中的驗(yàn)證技術(shù)領(lǐng)域尚屬空白。
本文以北斗全球系統(tǒng)衛(wèi)星研制為背景,設(shè)計(jì)了自主導(dǎo)航地面模擬測(cè)試系統(tǒng),在設(shè)計(jì)階段即可模擬整星軟硬件環(huán)境,實(shí)現(xiàn)自主導(dǎo)航長(zhǎng)期可靠性“跑合”(指系統(tǒng)組裝完成后,按事先設(shè)計(jì)規(guī)程進(jìn)行的運(yùn)轉(zhuǎn)試驗(yàn)),具備從設(shè)計(jì)到在軌的全生命周期的擴(kuò)展應(yīng)用能力,充分驗(yàn)證北斗高精度自主導(dǎo)航性能指標(biāo)。
2 問題分析與設(shè)計(jì)原則
北斗全球系統(tǒng)自主導(dǎo)航算法復(fù)雜,接口信息繁多,組網(wǎng)衛(wèi)星之間時(shí)序配合精確,具有如下特性:
(1)自主導(dǎo)航計(jì)算機(jī)處理器及存儲(chǔ)器的選用受到空間環(huán)境限制,但在有限的運(yùn)算精度、處理能力和存儲(chǔ)資源條件下必須保證導(dǎo)航服務(wù)的性能指標(biāo)。
(2)運(yùn)行于較高軌道的北斗導(dǎo)航衛(wèi)星易于受到單粒子效應(yīng)影響觸發(fā)設(shè)備復(fù)位或切機(jī)故障,在自主運(yùn)行60天期間需要自主快速恢復(fù)。
(3)時(shí)分體制的星間網(wǎng)絡(luò)為自主導(dǎo)航提供通信鏈路資源和測(cè)量信息,但在軌的星間幾何構(gòu)型及路由算法必須保證較小的位置精度因子,提高定位精度。
為此北斗自主導(dǎo)航技術(shù)需要在地面進(jìn)行充分的測(cè)試與驗(yàn)證。然而單純采用軟件模型仿真的方法僅能驗(yàn)證算法理論,無法證明其在衛(wèi)星實(shí)物平臺(tái)工程實(shí)現(xiàn)的可行性與正確性;作為正在快速發(fā)展的衛(wèi)星自主智能的代表,北斗自主導(dǎo)航信息綜合性強(qiáng)的特點(diǎn),導(dǎo)致傳統(tǒng)的激勵(lì)-反饋模式的測(cè)試方法失效;北斗全球組網(wǎng)批產(chǎn)的快節(jié)奏,導(dǎo)致在整星測(cè)試階段及分系統(tǒng)測(cè)試階段沒有資源供給自主導(dǎo)航進(jìn)行長(zhǎng)期“跑合”可靠性測(cè)試,這些均成為地面驗(yàn)證的難題。
針對(duì)自主導(dǎo)航的在軌特性及測(cè)試驗(yàn)證中遇到的問題,北斗全球系統(tǒng)自主導(dǎo)航模擬測(cè)試系統(tǒng)在構(gòu)建時(shí)遵循以下設(shè)計(jì)原則:①擴(kuò)展性:以最小的設(shè)備集合實(shí)現(xiàn)最完整的功能包絡(luò),盡量在單機(jī)階段完成全面驗(yàn)證及長(zhǎng)期可靠性“跑合”,同時(shí)進(jìn)行標(biāo)準(zhǔn)化接口設(shè)計(jì),靈活擴(kuò)展支持分系統(tǒng)及整星測(cè)試,使軟件設(shè)計(jì)、單機(jī)驗(yàn)證、整星測(cè)試全生命周期場(chǎng)景一致。②通用化:驗(yàn)證全球組網(wǎng)星座級(jí)自主導(dǎo)航信息流及星間星地協(xié)議,具備靈活接入中圓地球軌道(MEO)、地球靜止軌道(GEO)和傾斜地球同步軌道(IGSO)三類軌道衛(wèi)星的能力。③集成化:融合軟硬件實(shí)物平臺(tái)與全星座虛擬仿真平臺(tái),集成運(yùn)控、星間鏈路[5]及測(cè)控多通道信息模擬與處理。④自動(dòng)化:支持60天無人值守運(yùn)行,自主完成數(shù)據(jù)分析及跟蹤評(píng)估。
3 技術(shù)方案
北斗全球系統(tǒng)自主導(dǎo)航地面模擬測(cè)試系統(tǒng)以北斗全星座衛(wèi)星自主導(dǎo)航仿真為基礎(chǔ),模擬測(cè)控系統(tǒng)、運(yùn)行控制系統(tǒng)及星間鏈路系統(tǒng),引入衛(wèi)星鐘差、星間測(cè)距時(shí)延、收發(fā)天線相位中心至衛(wèi)星質(zhì)心的修正量等誤差因素,建立在軌真實(shí)環(huán)境的半實(shí)物模擬測(cè)試平臺(tái)。基于航天器工程建設(shè)中設(shè)備接口繁多和信息類型龐雜的特點(diǎn),本節(jié)從系統(tǒng)架構(gòu)和信息流設(shè)計(jì)兩方面對(duì)方案進(jìn)行論述。
3.1 系統(tǒng)架構(gòu)設(shè)計(jì)
自主導(dǎo)航軟件運(yùn)行于星載計(jì)算機(jī),由導(dǎo)航載荷、測(cè)控應(yīng)答機(jī)和星間收發(fā)信機(jī)構(gòu)成外部通道環(huán)境,由北斗星座組網(wǎng)構(gòu)成空間鏈路環(huán)境,因此在模擬測(cè)試系統(tǒng)設(shè)計(jì)中,利用標(biāo)準(zhǔn)航天器鏈路通信終端替代鏈路設(shè)備,以仿真測(cè)試服務(wù)器建立仿真星座,實(shí)現(xiàn)圖1所示的以服務(wù)器為核心的模擬測(cè)試系統(tǒng)架構(gòu)。
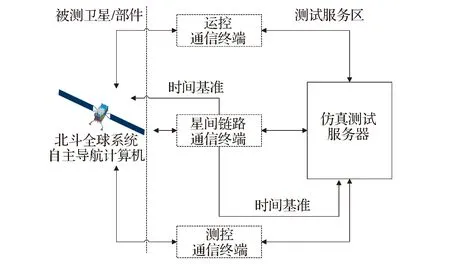
圖1 模擬測(cè)試系統(tǒng)架構(gòu)Fig.1 Architecture of simulation and test system
1)仿真測(cè)試服務(wù)器
北斗自主導(dǎo)航技術(shù)的基礎(chǔ)是全球組網(wǎng),由網(wǎng)絡(luò)中的衛(wèi)星節(jié)點(diǎn)之間測(cè)量通信并分布式計(jì)算[6]實(shí)現(xiàn)精確定位。作為控制中心,仿真測(cè)試服務(wù)器構(gòu)建了北斗全球系統(tǒng)星間及星地網(wǎng)絡(luò),利用通信終端實(shí)現(xiàn)與自主導(dǎo)航計(jì)算機(jī)交互信息,并具備直接與整星對(duì)接的擴(kuò)展能力。服務(wù)器實(shí)現(xiàn)全星座衛(wèi)星分布式自主導(dǎo)航的仿真,集成地面測(cè)控站、地面運(yùn)控主控站及Ka頻段錨固站模擬功能,基于以太網(wǎng)定制服務(wù)協(xié)議鏈接各通信終端。通信終端通過衛(wèi)星電纜與自主導(dǎo)航計(jì)算機(jī)進(jìn)行信息交互,將自主導(dǎo)航計(jì)算機(jī)實(shí)物目標(biāo)接入至仿真星座網(wǎng)絡(luò)中。與整星對(duì)接時(shí),測(cè)控應(yīng)答機(jī)、相控陣收發(fā)信機(jī)及導(dǎo)航載荷替代通信終端,通過整星電纜網(wǎng)與自主導(dǎo)航計(jì)算機(jī)通信。在服務(wù)器外圍配套中頻處理機(jī)和射頻上、下變頻器,實(shí)現(xiàn)與相控陣收發(fā)信機(jī)通信,配套網(wǎng)絡(luò)交換機(jī)與整星測(cè)控前端及運(yùn)控前端通信,建立測(cè)控、運(yùn)控及星間通道,將被測(cè)衛(wèi)星接入至仿真衛(wèi)星網(wǎng)絡(luò),服務(wù)器通過更換底層驅(qū)動(dòng),實(shí)現(xiàn)整星測(cè)試設(shè)備拓?fù)湎碌耐ㄐ殴δ軘U(kuò)展。服務(wù)器提供可視化界面,遠(yuǎn)程控制衛(wèi)星自主導(dǎo)航的運(yùn)行,實(shí)時(shí)監(jiān)視接口狀態(tài)及算法運(yùn)算過程,對(duì)下行播發(fā)的星歷及鐘差結(jié)果進(jìn)行跟蹤評(píng)估。
2)測(cè)控通信模擬
模擬系統(tǒng)針對(duì)測(cè)控通道設(shè)計(jì)了測(cè)控通信終端。通過模擬衛(wèi)星應(yīng)答機(jī)系統(tǒng),將在遠(yuǎn)程仿真測(cè)試服務(wù)器產(chǎn)生的遙控指令數(shù)據(jù),通過信號(hào)協(xié)議轉(zhuǎn)換轉(zhuǎn)發(fā)至自主導(dǎo)航計(jì)算機(jī)的遙控接口,實(shí)現(xiàn)衛(wèi)星時(shí)間校正、星間網(wǎng)絡(luò)拓?fù)浼奥酚膳渲玫瓤刂乒δ堋W灾鲗?dǎo)航計(jì)算機(jī)產(chǎn)生的實(shí)時(shí)遙測(cè)數(shù)據(jù),通過遙測(cè)接口發(fā)往測(cè)控通信終端,經(jīng)解析后發(fā)送至遠(yuǎn)程仿真測(cè)試服務(wù)器。仿真測(cè)試服務(wù)器根據(jù)軟件狀態(tài)及結(jié)果遙測(cè)實(shí)現(xiàn)過程自動(dòng)化判讀,監(jiān)測(cè)衛(wèi)星運(yùn)行狀態(tài)。
3)運(yùn)控通信模擬
導(dǎo)航衛(wèi)星載荷設(shè)備負(fù)責(zé)主控站注入的運(yùn)控信息業(yè)務(wù)數(shù)據(jù)的處理及轉(zhuǎn)發(fā),模擬衛(wèi)星載荷的運(yùn)控通信終端接收仿真測(cè)試服務(wù)器中模擬主控站的注入信息,轉(zhuǎn)化為星載接口業(yè)務(wù)格式,通過信號(hào)協(xié)議轉(zhuǎn)換注入至自主導(dǎo)航計(jì)算機(jī)。自主導(dǎo)航計(jì)算機(jī)從運(yùn)控通信終端獲取啟動(dòng)電文參數(shù)及運(yùn)行周期、擬合時(shí)長(zhǎng)等控制信息,并將計(jì)算產(chǎn)生的自主導(dǎo)航電文及完好性信息,通過運(yùn)控通信終端播發(fā)至遠(yuǎn)程仿真測(cè)試服務(wù)器。
4)星間鏈路通信模擬
相控陣收發(fā)信機(jī)與自主導(dǎo)航計(jì)算機(jī)之間的星載接口業(yè)務(wù),由星間鏈路通信終端模擬。終端將遠(yuǎn)程仿真測(cè)試服務(wù)器產(chǎn)生的本星測(cè)量幀及星間自主導(dǎo)航業(yè)務(wù)數(shù)據(jù)幀,提交給自主導(dǎo)航計(jì)算機(jī),把自主導(dǎo)航計(jì)算機(jī)產(chǎn)生的自主導(dǎo)航星間業(yè)務(wù)數(shù)據(jù)幀,轉(zhuǎn)發(fā)給仿真測(cè)試服務(wù)器。
3.2 信息流設(shè)計(jì)
按路徑區(qū)分,北斗自主導(dǎo)航地面模擬測(cè)試系統(tǒng)內(nèi)信息傳輸,可分為星內(nèi)路徑和星間路徑,均以北斗標(biāo)準(zhǔn)協(xié)議幀為載體,為星載自主導(dǎo)航計(jì)算機(jī)構(gòu)建真實(shí)外部環(huán)境。出于兼容性設(shè)計(jì),星內(nèi)的信息流在整星測(cè)試階段真實(shí)設(shè)備加入后可靈活隔離。按信息區(qū)分,傳輸?shù)男畔⒖煞譃榭刂祁愋畔⒑陀?jì)算信息,控制類型信息便于系統(tǒng)狀態(tài)感知與維護(hù),計(jì)算信息則作為北斗全球系統(tǒng)自主導(dǎo)航算法周期迭代的基礎(chǔ)。
以被測(cè)衛(wèi)星自主導(dǎo)航計(jì)算機(jī)為中心進(jìn)行分析,可以得到星地遙控、星地遙測(cè)、星內(nèi)時(shí)間業(yè)務(wù)、星間發(fā)送、星間接收、星內(nèi)接口業(yè)務(wù)、星地運(yùn)控注入、星地運(yùn)控用戶數(shù)據(jù)下發(fā)共8條路徑,涵蓋功能控制信息、衛(wèi)星及網(wǎng)絡(luò)健康狀態(tài)、北斗時(shí)基準(zhǔn)、電文、協(xié)方差、雙向偽距測(cè)量、用戶星歷、用戶鐘差及完好性結(jié)果等信息。由于涉及多種數(shù)據(jù)類型,在設(shè)計(jì)時(shí)需針對(duì)每類業(yè)務(wù)信息路徑進(jìn)行分析,保證信息覆蓋完整且時(shí)序無沖突。以星間路徑為例,自主導(dǎo)航電文、星歷星鐘協(xié)方差、全星座偽旋轉(zhuǎn)修正定向參數(shù)、單向偽距測(cè)量值在北斗時(shí)分復(fù)用網(wǎng)絡(luò)中,需要根據(jù)建鏈關(guān)系定時(shí)啟動(dòng)星間交互,于算法處理之前匯聚分布式數(shù)據(jù)集合,要求系統(tǒng)部件之間以嚴(yán)格的時(shí)序通信,避免跨運(yùn)行周期的數(shù)據(jù)錯(cuò)亂。而星內(nèi)接口業(yè)務(wù)涵蓋的本星偽距測(cè)量值的收集、用戶星歷星鐘的傳輸、網(wǎng)絡(luò)狀態(tài)數(shù)據(jù)的發(fā)布等,與星間路徑中的信息時(shí)序形成嚴(yán)密的配合,覆蓋自主導(dǎo)航全部輸入輸出。各應(yīng)用業(yè)務(wù)類型在設(shè)備間的信息流如圖2所示。
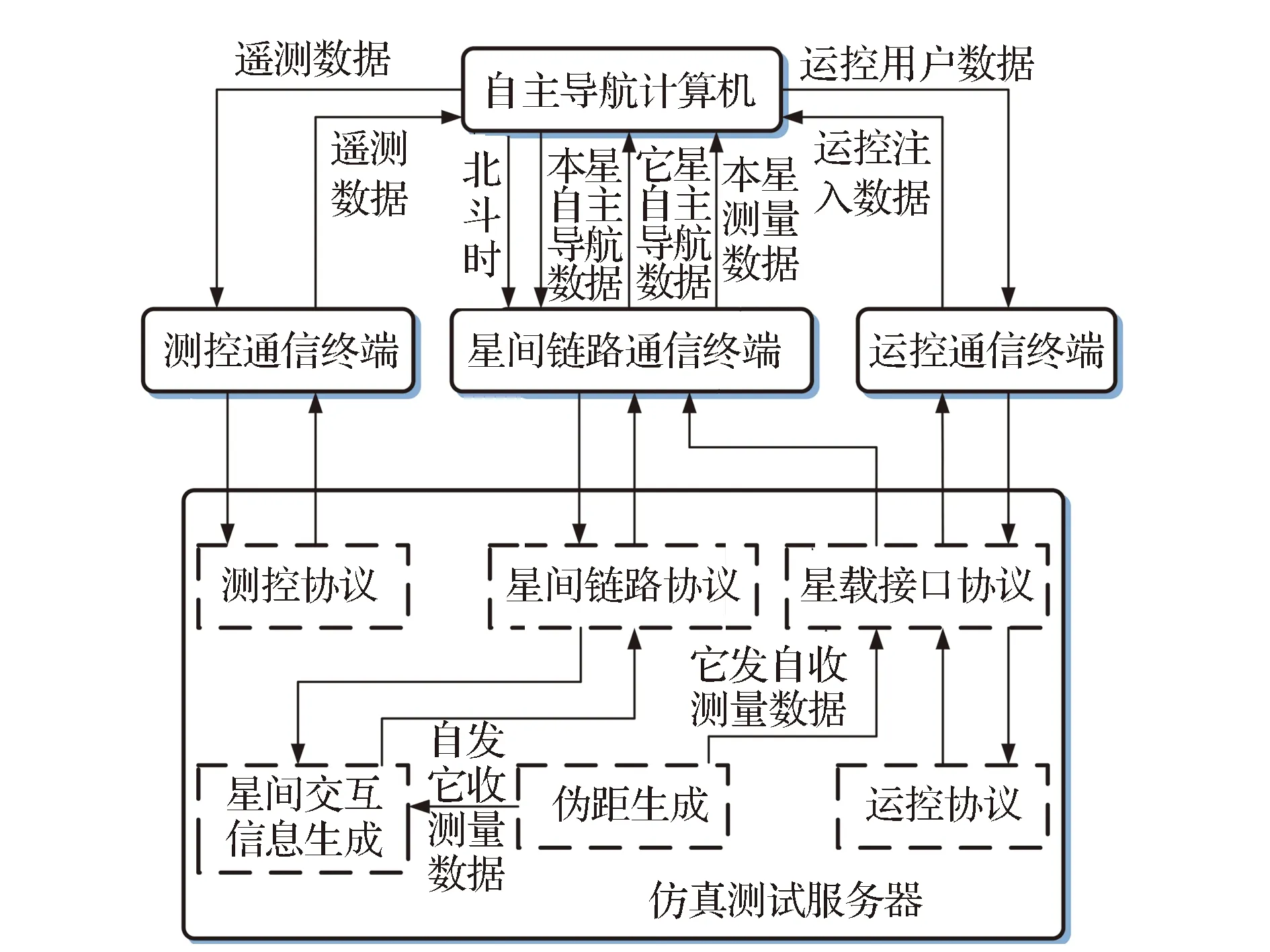
圖2 業(yè)務(wù)信息流圖Fig.2 Service information flow diagram
4 設(shè)計(jì)原理
通過系統(tǒng)架構(gòu)和信息流的設(shè)計(jì)過程可以看出,自主導(dǎo)航模擬測(cè)試系統(tǒng)涉及了整星所有信息通路及業(yè)務(wù)類型,涵蓋了星載接口業(yè)務(wù)和星座組網(wǎng)路由關(guān)鍵技術(shù)。從系統(tǒng)設(shè)計(jì)角度,利用有限的地面設(shè)備資源建立精確的星間通信機(jī)制和系統(tǒng)唯一的時(shí)間基準(zhǔn),是對(duì)星座運(yùn)行真實(shí)模擬的難點(diǎn);從功能目的角度,自主導(dǎo)航性能評(píng)估方法和長(zhǎng)期可靠性“跑合”的自動(dòng)化處理,是決定系統(tǒng)成敗的關(guān)鍵;從虛實(shí)融合的角度,仿真測(cè)試服務(wù)器的設(shè)計(jì)方法,是決定系統(tǒng)擴(kuò)展性、通用性和構(gòu)建北斗網(wǎng)絡(luò)分布式計(jì)算環(huán)境的核心。
4.1 星間通信機(jī)制
北斗導(dǎo)航衛(wèi)星星間通信采用時(shí)分復(fù)用通信機(jī)制,以n×1 s為時(shí)間粒度進(jìn)行星間信息交換。在自主導(dǎo)航工作周期內(nèi),以星間雙向測(cè)距信息作為軌道卡爾曼濾波輸入,通過導(dǎo)航網(wǎng)絡(luò)完成星間測(cè)量值、測(cè)距修正量、電文等自主導(dǎo)航信息交換,各衛(wèi)星節(jié)點(diǎn)利用收集的信息完成分布式自主導(dǎo)航算法計(jì)算。
北斗自主導(dǎo)航地面模擬測(cè)試系統(tǒng),完全模擬在軌運(yùn)行的北斗星間通信的協(xié)議及時(shí)序,利用以太網(wǎng)替代空間信號(hào)傳輸,利用通信終端替代物理層的測(cè)控應(yīng)答機(jī)、相控陣收發(fā)信機(jī)等編碼與同步層設(shè)備,星間偽距生成組件仿真產(chǎn)生雙向測(cè)距,并根據(jù)用戶配置參數(shù)靈活動(dòng)態(tài),引入鐘差參數(shù)、電離層干擾、相對(duì)論效應(yīng)和硬件通道時(shí)延。
模擬測(cè)試系統(tǒng)僅建立鏈路層及以上層級(jí)的通信,減少了對(duì)信機(jī)等衛(wèi)星通信物理層設(shè)備的依賴,使系統(tǒng)架構(gòu)更為簡(jiǎn)潔,利于降低自主導(dǎo)航驗(yàn)證成本。
4.2 時(shí)間同步策略
北斗全球系統(tǒng)的星地之間、衛(wèi)星之間和星內(nèi)各設(shè)備之間時(shí)間嚴(yán)格同步,為用戶提供高精度位置和時(shí)間服務(wù)。在測(cè)試系統(tǒng)中,仿真衛(wèi)星與被測(cè)衛(wèi)星實(shí)時(shí)通信并同步向后推算,時(shí)分復(fù)用的通信機(jī)制要求在精簡(jiǎn)的半實(shí)物的北斗仿真星座中也建立唯一的時(shí)間基準(zhǔn)。然而星載自主導(dǎo)航計(jì)算機(jī)僅能通過測(cè)控通道授時(shí),且測(cè)控信息在經(jīng)過測(cè)控通信終端及以太網(wǎng)傳輸過程中存在秒級(jí)時(shí)延,使測(cè)試系統(tǒng)與衛(wèi)星之間同步困難。因此模擬測(cè)試系統(tǒng)創(chuàng)新地采用時(shí)間碼與秒脈沖分別同步的環(huán)形校正方法,星間鏈路通信終端作為秒沿基準(zhǔn),而自主導(dǎo)航計(jì)算機(jī)作為北斗時(shí)時(shí)間碼基準(zhǔn),如圖3所示。
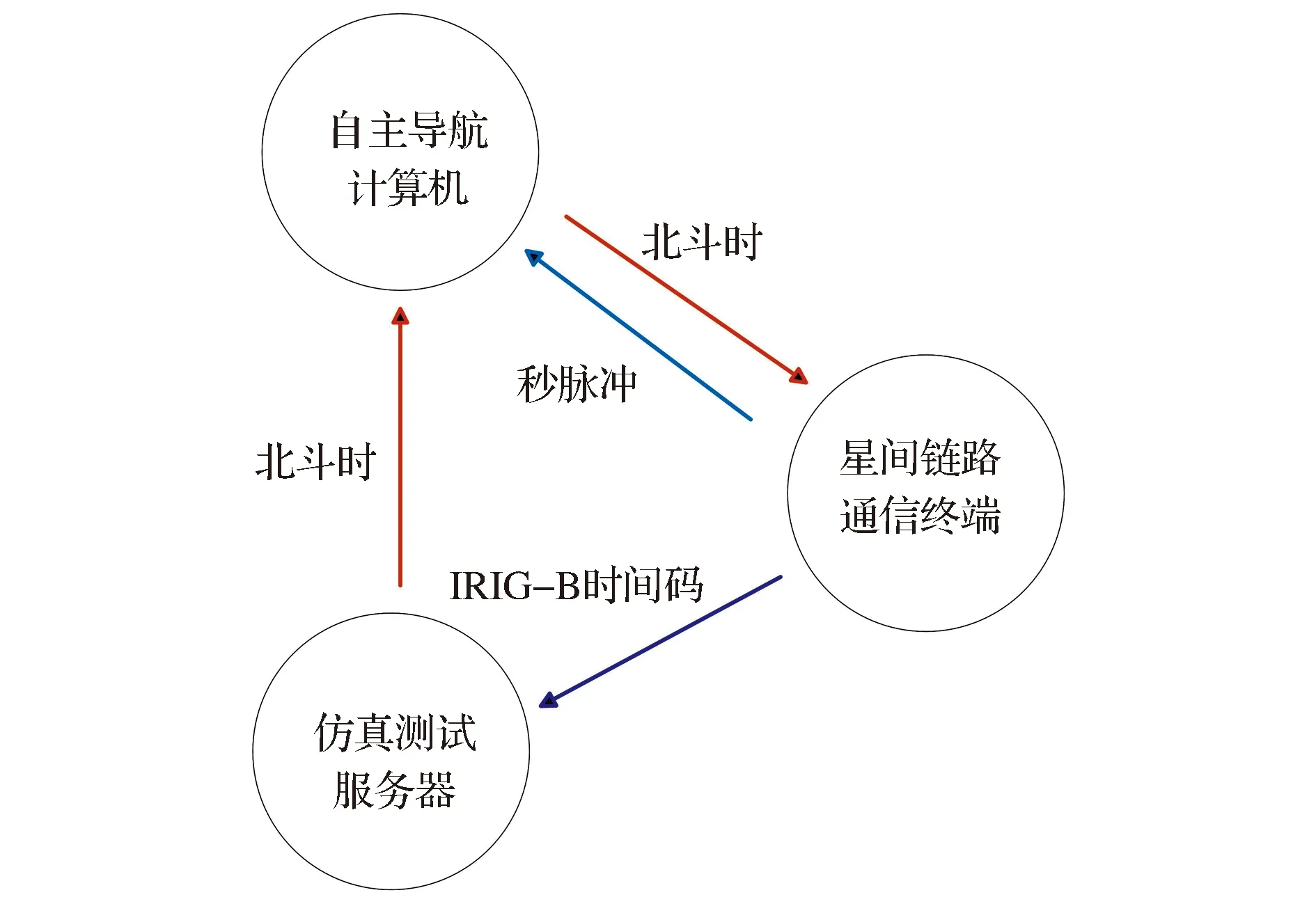
圖3 時(shí)間環(huán)形校正法示意圖Fig.3 Schematic diagram of time loop synchronization method
星間鏈路通信終端模擬北斗導(dǎo)航衛(wèi)星的原子鐘產(chǎn)生時(shí)頻脈沖,接入至自主導(dǎo)航計(jì)算機(jī)。星載自主導(dǎo)航計(jì)算機(jī)每秒向星間鏈路通信終端播發(fā)當(dāng)前北斗時(shí)。當(dāng)星間鏈路通信終端接收到衛(wèi)星北斗時(shí),將其調(diào)制為IRIG-B(DC)時(shí)間碼格式[7]。仿真測(cè)試服務(wù)器插裝標(biāo)準(zhǔn)IRIG-B時(shí)間接收卡,識(shí)別時(shí)間碼元及前沿,實(shí)現(xiàn)與北斗時(shí)的秒脈沖及時(shí)間精確同步。通過測(cè)控通道注入衛(wèi)星校時(shí)指令,即可實(shí)現(xiàn)北斗自主導(dǎo)航模擬測(cè)試系統(tǒng)各設(shè)備間時(shí)間同步,時(shí)間同步精度誤差小于1 ms,滿足時(shí)分通信要求。
4.3 結(jié)果評(píng)估方法
結(jié)果評(píng)估方法以自主導(dǎo)航性能指標(biāo)的驗(yàn)證為導(dǎo)向。除正常使用模式外,為加快驗(yàn)證系統(tǒng)完好性的進(jìn)程,模擬測(cè)試系統(tǒng)還設(shè)計(jì)了自測(cè)試模式。在自測(cè)試模式下,仿真測(cè)試服務(wù)器獨(dú)立運(yùn)行北斗星座,仿真衛(wèi)星之間交換單程測(cè)距信息及星歷信息、分布式運(yùn)行自主導(dǎo)航算法并按倍頻的工作周期迭代運(yùn)算。在正常模式下被測(cè)衛(wèi)星加入模擬測(cè)試系統(tǒng)后,與被測(cè)衛(wèi)星同軌位的仿真衛(wèi)星進(jìn)入隔離模式,僅接收其他衛(wèi)星發(fā)來的測(cè)距和電文,保持周期性運(yùn)行。被測(cè)衛(wèi)星替代同軌位仿真衛(wèi)星接入仿真星座。被測(cè)衛(wèi)星產(chǎn)生的電文及完好性信息會(huì)在下一個(gè)工作周期被仿真星座內(nèi)其他衛(wèi)星使用。
北斗自主導(dǎo)航的精度取決于偽距和載波相位測(cè)量值及廣播導(dǎo)航數(shù)據(jù)的質(zhì)量,其誤差是由控制段、空間段和用戶段所引起的。模擬測(cè)試系統(tǒng)重點(diǎn)針對(duì)控制段和空間段的誤差對(duì)精度性能的影響進(jìn)行評(píng)估。由于被測(cè)衛(wèi)星節(jié)點(diǎn)及仿真衛(wèi)星節(jié)點(diǎn)所輸入的測(cè)量值、星歷及鐘差信息,均源自仿真測(cè)試服務(wù)器的算法組件,輸出電文結(jié)果的誤差與模擬測(cè)試系統(tǒng)設(shè)備無關(guān),僅與測(cè)距生成時(shí)用戶配置的硬件通道時(shí)延、鐘差、電離層參數(shù)及幾何因子(DOP)相關(guān)。導(dǎo)航衛(wèi)星通常將誤差源歸屬到各顆衛(wèi)星的偽距中,看成是偽距值中的等效誤差[8],因此本系統(tǒng)以數(shù)據(jù)齡期(AOD)取值0~120 min的星歷用戶偽距誤差(URE)和鐘差作為評(píng)估值。根據(jù)系統(tǒng)使用模式,提取自主導(dǎo)航結(jié)果評(píng)估的8個(gè)項(xiàng)目如表1所示。
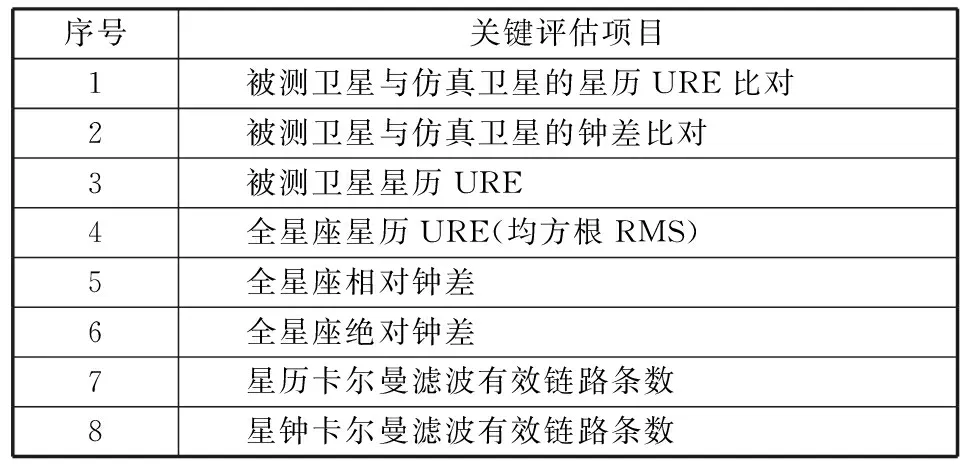
表1 結(jié)果評(píng)估項(xiàng)目
4.4 自動(dòng)化處理方法
自動(dòng)化處理是自主導(dǎo)航60天長(zhǎng)期“跑合”的支撐技術(shù),由測(cè)控通信終端和運(yùn)控通信終端配合完成,實(shí)現(xiàn)一鍵式自動(dòng)化測(cè)試。系統(tǒng)運(yùn)行過程可分解為初始化參數(shù)配置、時(shí)間同步、監(jiān)測(cè)評(píng)估、故障恢復(fù)環(huán)節(jié)。為實(shí)現(xiàn)無人值守的目標(biāo),通過遠(yuǎn)程仿真測(cè)試服務(wù)器訪問運(yùn)控通信終端,注入長(zhǎng)期預(yù)報(bào)星歷、啟動(dòng)星歷及鐘差等參數(shù);利用仿真測(cè)試服務(wù)器訪問測(cè)控通信終端,操作開啟被測(cè)衛(wèi)星星間網(wǎng)絡(luò)業(yè)務(wù)及天線指向業(yè)務(wù)并同步星地時(shí)間;過程監(jiān)測(cè)及評(píng)估結(jié)果自動(dòng)錄入數(shù)據(jù)庫(kù),并通過圖形界面實(shí)時(shí)顯示;當(dāng)系統(tǒng)發(fā)生故障時(shí),進(jìn)行錯(cuò)誤報(bào)警并恢復(fù)。故障恢復(fù)環(huán)節(jié)與時(shí)間同步和初始化配置緊密結(jié)合:服務(wù)器通過載荷星內(nèi)接口業(yè)務(wù)向星載計(jì)算機(jī)實(shí)時(shí)播發(fā)北斗時(shí),當(dāng)星載計(jì)算機(jī)故障復(fù)位時(shí),根據(jù)服務(wù)器提供的北斗時(shí)基準(zhǔn)恢復(fù)星上時(shí)間,維持系統(tǒng)時(shí)間同步,被測(cè)星與仿真星利用最后一次正確的計(jì)算結(jié)果繼續(xù)運(yùn)行;若對(duì)衛(wèi)星進(jìn)行校時(shí),系統(tǒng)根據(jù)環(huán)形校正法跟隨星載計(jì)算機(jī)中維護(hù)的北斗時(shí),實(shí)現(xiàn)星座自主導(dǎo)航在外部干擾情況下全自主運(yùn)行。
4.5 仿真測(cè)試服務(wù)器設(shè)計(jì)方法
仿真測(cè)試服務(wù)器集成北斗地面模擬測(cè)試系統(tǒng)的全星座虛擬仿真與測(cè)試中樞,采用分層結(jié)構(gòu),可劃分為用戶接口層、系統(tǒng)功能層和運(yùn)行支持層,如圖4所示。
用戶接口層提供面向系統(tǒng)測(cè)試技術(shù)人員的交互界面,提供遙控及運(yùn)控上行操作接口,接收并顯示遙測(cè)信息及導(dǎo)航載荷播發(fā)信息,進(jìn)行仿真測(cè)試場(chǎng)景或運(yùn)行參數(shù)的配置,設(shè)置星座配置、衛(wèi)星連接關(guān)系、協(xié)議參數(shù)等屬性,在測(cè)試過程中動(dòng)態(tài)顯示網(wǎng)絡(luò)仿真及算法運(yùn)行的狀態(tài),并根據(jù)定制方式生成評(píng)估結(jié)果的圖形化顯示。
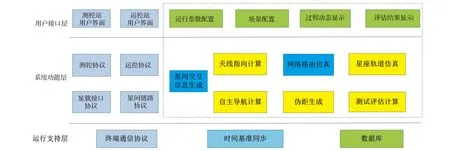
圖4 仿真測(cè)試服務(wù)器架構(gòu)Fig.4 Architecture of the simulation and test server
系統(tǒng)功能層由執(zhí)行仿真計(jì)算及協(xié)議轉(zhuǎn)換的核心組件構(gòu)成,將用戶接口層的配置信息以配置文件導(dǎo)入各仿真組件并執(zhí)行,將組件執(zhí)行狀態(tài)、過程數(shù)據(jù)及評(píng)估結(jié)果文件保存于數(shù)據(jù)庫(kù)。利用星座軌道仿真組件產(chǎn)生北斗星座網(wǎng)絡(luò)中每顆衛(wèi)星的位置坐標(biāo),利用自主導(dǎo)航計(jì)算組件模擬全星座衛(wèi)星節(jié)點(diǎn),利用網(wǎng)絡(luò)路由仿真組件形成建鏈關(guān)系和路由規(guī)劃,利用星間交互信息生成組件實(shí)現(xiàn)星間數(shù)據(jù)產(chǎn)生與接收,利用測(cè)控協(xié)議組件及運(yùn)控協(xié)議組件為用戶支持層提供操作與顯示服務(wù),利用測(cè)試評(píng)估計(jì)算組件對(duì)星歷及鐘差精度、鏈路使用率等性能進(jìn)行評(píng)估。
運(yùn)行支持層提供各組件與外部信息交互的底層支撐環(huán)境及數(shù)據(jù)存儲(chǔ)、查詢功能。接收外部時(shí)間信號(hào),為各層業(yè)務(wù)提供時(shí)間基準(zhǔn),同時(shí)將衛(wèi)星標(biāo)準(zhǔn)協(xié)議幀封裝于定制的模擬測(cè)試系統(tǒng)協(xié)議幀中,實(shí)現(xiàn)與各鏈路終端的通信。
分層設(shè)計(jì)方法保證了軌道計(jì)算、建鏈路由規(guī)劃和自主導(dǎo)航算法的構(gòu)件封閉性和動(dòng)態(tài)加載能力。此外,在單機(jī)交付整星測(cè)試時(shí),僅需替換運(yùn)行支持層的終端通信協(xié)議,即可實(shí)現(xiàn)模擬測(cè)試系統(tǒng)的向后兼容。
5 應(yīng)用與驗(yàn)證
在單機(jī)測(cè)試階段,利用北斗全球系統(tǒng)自主導(dǎo)航地面模擬測(cè)試系統(tǒng)建立空間應(yīng)用環(huán)境,通過仿真測(cè)試服務(wù)器模擬北斗全星座衛(wèi)星,引入鐘差、時(shí)延等誤差源,對(duì)在星載計(jì)算機(jī)中運(yùn)行的自主導(dǎo)航算法進(jìn)行性能評(píng)估,同時(shí)對(duì)模擬測(cè)試系統(tǒng)的通用性、集成化、自主運(yùn)行穩(wěn)定性進(jìn)行考核。驗(yàn)證條件如表2所示。
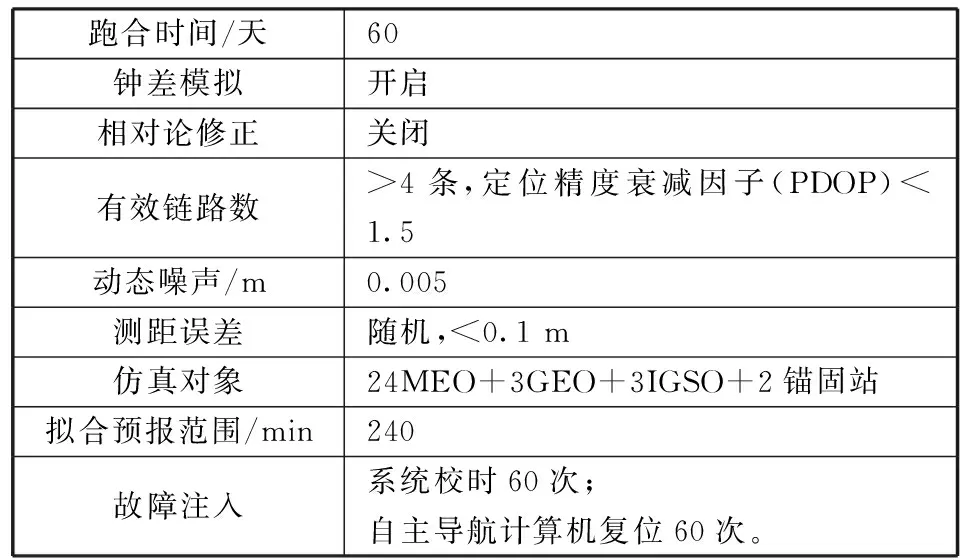
表2 驗(yàn)證條件
測(cè)試結(jié)果表明:北斗自主導(dǎo)航地面模擬測(cè)試系統(tǒng)能夠通過可視化界面實(shí)時(shí)監(jiān)測(cè)星載自主導(dǎo)航計(jì)算過程,具備靈活接入MEO、GEO、IGSO和地面錨固站的能力,可全覆蓋驗(yàn)證自主導(dǎo)航信息流及星間星地標(biāo)準(zhǔn)協(xié)議。在故障注入的條件下自主運(yùn)行60天后,以秒脈沖為基準(zhǔn)的經(jīng)過自動(dòng)化處理設(shè)計(jì)的模擬測(cè)試系統(tǒng)仿真衛(wèi)星與被測(cè)衛(wèi)星保持時(shí)分建鏈,嚴(yán)格按照網(wǎng)絡(luò)時(shí)序同步通信。結(jié)果評(píng)估的8個(gè)項(xiàng)目均滿足北斗自主導(dǎo)航指標(biāo)要求,其中仿真星及被測(cè)星的星歷URE差值小于1 m,說明星上針對(duì)受限的硬件資源優(yōu)化后的自主導(dǎo)航算法精度指標(biāo)與仿真衛(wèi)星一致,達(dá)到預(yù)期的驗(yàn)證效果。全星座星歷URE評(píng)估結(jié)果如圖5所示。
在整星測(cè)試階段,去除模擬測(cè)試系統(tǒng)中的各通信終端,修改仿真測(cè)試服務(wù)器運(yùn)行支持層,實(shí)現(xiàn)了與整星擴(kuò)頻應(yīng)答機(jī)、相控陣收發(fā)信機(jī)及導(dǎo)航載荷設(shè)備的有線對(duì)接。地面模擬測(cè)試系統(tǒng)功能擴(kuò)展后完成星-星-地聯(lián)合自主導(dǎo)航測(cè)試,驗(yàn)證結(jié)果與單機(jī)測(cè)試結(jié)果相同。
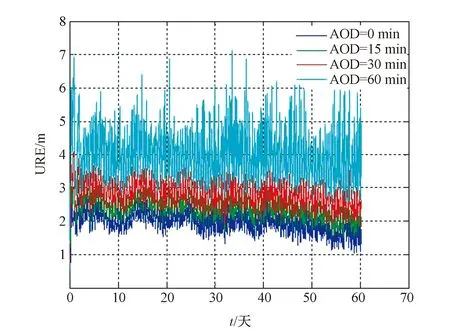
圖5 全星座星歷URE-RMS評(píng)估結(jié)果圖Fig.5 Evaluation results of URE-RMS of the constellation
在軌應(yīng)用階段,根據(jù)地面模擬測(cè)試系統(tǒng)復(fù)建空間工作場(chǎng)景,通過衛(wèi)星遙測(cè)獲知固定時(shí)間段的真實(shí)星間偽距測(cè)量信息、全星座自主導(dǎo)航電文信息、網(wǎng)絡(luò)建鏈拓?fù)浼奥酚尚畔ⅲ纬膳渲梦募⑴渲梦募虞d于仿真測(cè)試服務(wù)器的星間交互信息生成模塊,為仿真星及地面真星提供輸入。仿真星及地面真星完成自主導(dǎo)航計(jì)算后與在軌衛(wèi)星進(jìn)行自主導(dǎo)航電文結(jié)果比對(duì),實(shí)現(xiàn)在軌與地面雙向印證的目的。若在軌自主導(dǎo)航性能指標(biāo)不理想,亦可通過模擬測(cè)試系統(tǒng)驗(yàn)證自主導(dǎo)航升級(jí)版軟件后執(zhí)行在軌維護(hù)。系統(tǒng)的可擴(kuò)展性為自主導(dǎo)航設(shè)計(jì)、測(cè)試及在軌全周期的驗(yàn)證一致性提供保障。
6 結(jié)束語
本文從北斗高精度自主導(dǎo)航性能指標(biāo)的測(cè)試驗(yàn)證的需求出發(fā)設(shè)計(jì)北斗自主導(dǎo)航地面模擬測(cè)試系統(tǒng),論述了系統(tǒng)設(shè)計(jì)原則與架構(gòu),研究了星間通信機(jī)制、時(shí)間同步策略、結(jié)果評(píng)估方法等設(shè)計(jì)原理。系統(tǒng)在60天自主運(yùn)行期間基準(zhǔn)鐘差不超過1 ms,仿真星和實(shí)物星URE差值小于1 m,具備超出60次復(fù)位及校時(shí)的故障恢復(fù)能力,支持在模擬建鏈場(chǎng)景及誤差源的條件下對(duì)北斗全球系統(tǒng)任意衛(wèi)星的自主導(dǎo)航任務(wù)進(jìn)行“跑合”驗(yàn)證,可應(yīng)用于設(shè)計(jì)、測(cè)試及在軌運(yùn)行階段。為全球組網(wǎng)衛(wèi)星自主導(dǎo)航算法優(yōu)化提供了有效的工具,為未來集中式自主導(dǎo)航的設(shè)計(jì)驗(yàn)證方法提供參考。模擬測(cè)試系統(tǒng)擴(kuò)展性、通用化、集成化和自動(dòng)化的設(shè)計(jì)原則,以及時(shí)間同步、結(jié)果評(píng)估、任務(wù)仿真等設(shè)計(jì)方法,對(duì)其它衛(wèi)星自主智能任務(wù)的測(cè)試系統(tǒng)構(gòu)建具有借鑒意義。
References)
[1]王海紅.導(dǎo)航衛(wèi)星星載自主軌道預(yù)報(bào)技術(shù)[J],宇航學(xué)報(bào),2012,33(8):1019-1026
Wang Haihong. On-board autonomous orbit prediction algorithm for navigation satellites[J]. Journal of Astronautics, 2012, 33(8):1019-1026 (in Chinese)
[2]帥平,曲廣吉,陳忠貴. 導(dǎo)航星座自主導(dǎo)航技術(shù)研究[J]. 中國(guó)工程科學(xué),2006,8(3):22-30
ShuaiPing, Qu Guangji, Chen Zhonggui. Studies on autonomous navigation techniques for navigation constellations[J]. Engineering Science, 2006,8(3):22-30 (in Chinese)
[3]孟繁智. 星座自主導(dǎo)航關(guān)鍵技術(shù)研究[D]. 合肥:國(guó)防科學(xué)技術(shù)大學(xué), 2013
Meng Fanzhi. Research on key techniques of autonomous navigation for satellite based navigation constellation[D]. Hefei: National University of Defense Technology, 2013 (in Chinese)
[4]曹輝. 基于星間測(cè)量的星座自主導(dǎo)航研究與半物理仿真系統(tǒng)實(shí)現(xiàn)[D]. 南京:南京航空航天大學(xué), 2009
Cao Hui. Research on constellation autonomous navigation based on inter-satellite measurement and implementation of semiphysical simulation system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009 (in Chinese)
[5]侯振偉,易先清,鐘濤, 等. 輪詢建鏈規(guī)則下導(dǎo)航衛(wèi)星信息傳輸路徑選擇[J]. 裝備學(xué)院學(xué)報(bào),2015(3):69-73
Hou Zhenwei,YiXianqing, Zhong Tao,et al. Selection of navigation information transmission under the rules of polling chain-built[J]. Journal of Equipment Academy, 2015(3):69-73 (in Chinese)
[6]林益明,秦子增,初海彬,等. 基于星間鏈路的分布式導(dǎo)航自主定軌算法研究[J]. 宇航學(xué)報(bào),2010, 31(9):2088-2094
Lin Yiming, Qin Zizeng, Chu Haibin, et al. A satellite cross link-based GNSS distributed autonomous orbit determination algorithm[J]. Journal of Astronautics , 2010, 31(9):2088-2094 (in Chinese)
[7]賈磊. 基于FPGA的IRIG-B(DC)碼解碼卡的設(shè)計(jì)[J]. 計(jì)算機(jī)測(cè)量與控制,2015, 23(6):2143-2155
Jia Lei. Design of FPGA-based IRIG-B (DC) decoder card[J]. Computer Measurement & Control, 2015, 23(6):2143-2155 (in Chinese)
[8]Elliott D, Kaplan Cheristopher, J Hegarty. GPS原理與應(yīng)用[M]. 2版. 寇艷紅, 譯. 北京:電子工業(yè)出版社,2014
Elliott D, Kaplan Cheristopher, J Hegarty. Understanding GPS: principles and applications[M]. Second Edition. Kou Yanhong, translated. Beijing: Publishing House of Electronics Industry, 2014 (in Chinese)
(編輯:張小琳)
Design of Ground Simulation and Test System of Beidou Autonomous Navigation
JIA Weisong WANG Haihong YAN Hongcheng ZENG Lianlian
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
According to the verification of Beidou high precision autonomous navigation performance, the ground simulation and test system of Beidou satellite constellation is designed. Using the standard spacecraft link protocol terminal to access the on-board autonomous navigation computer, the architecture based on the simulation server is built. This paper expounds the system design principle from communication mechanism, time synchronization strategy, result evaluation method. The engineering practice shows that the system introduced in this paper supports the running-verification of satellite autonomous navigation under the conditions of simulated link scene and error source, and can be used in the stage of design, test and in-orbit operation. The design method can be used as reference for the construction of the test system of other satellite autonomous intelligence tasks.
Beidou satellite constellation; autonomous navigation; ground simulation and test system
2017-05-08;
2017-05-28
國(guó)家重大科技專項(xiàng)工程
賈衛(wèi)松,男,工程師,從事航天器綜合電子及自主運(yùn)行設(shè)計(jì)工作。Email:kingarthurjs@163.com。
V474.25;V524
A
10.3969/j.issn.1673-8748.2017.03.016
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會(huì)展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48