1553B總線噴管測控系統(tǒng)數(shù)字化設(shè)計(jì)與實(shí)現(xiàn)
2017-07-19 07:27:11褚福剛楊全海
無線電工程 2017年8期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
褚福剛,楊全海,康 寧,韓 用
(中國航天科工集團(tuán)第六研究院601所,內(nèi)蒙古 呼和浩特 010076)
1553B總線噴管測控系統(tǒng)數(shù)字化設(shè)計(jì)與實(shí)現(xiàn)
褚福剛,楊全海,康 寧,韓 用
(中國航天科工集團(tuán)第六研究院601所,內(nèi)蒙古 呼和浩特 010076)
為滿足噴管測控試驗(yàn)需要,提出了一種基于1553B總線的數(shù)字化測控系統(tǒng)設(shè)計(jì)方法,可用于對(duì)數(shù)字伺服機(jī)構(gòu)進(jìn)行控制,并提高了噴管的控制精度和穩(wěn)定性。對(duì)噴管測控系統(tǒng)的硬件系統(tǒng)和軟件系統(tǒng)設(shè)計(jì)分別進(jìn)行了闡述,同時(shí)對(duì)所實(shí)現(xiàn)測控系統(tǒng)的性能進(jìn)行了驗(yàn)證和測試。實(shí)際應(yīng)用表明,所設(shè)計(jì)的噴管測控系統(tǒng)具有可靠性高、實(shí)時(shí)性和精確性好的特點(diǎn)。
測控系統(tǒng);噴管;數(shù)字化;1553B總線
Abstract In order to meet the needs of measurement and control in nozzle swinging test,a design method of digital measurement and control system based on 1553B bus is proposed,which can be used to control the digital servo and improve the control precision and stability of the nozzle.The hardware system and software system design of the nozzle measurement and control system are described respectively,and the performance of the measurement and control system is verified and tested.The practical application shows that the designed measurement and control system of nozzle has the characteristics of high reliability,good real-time performance and accuracy.
Key words measurement and control system;nozzle;digital;1553B bus
0 引言
在噴管測控試驗(yàn)中需采用伺服機(jī)構(gòu)作為噴管擺動(dòng)的執(zhí)行機(jī)構(gòu),根據(jù)預(yù)先設(shè)定的控制指令,控制噴管的擺角或閥門的開度[1],其控制方式屬于伺服控制技術(shù)在試驗(yàn)領(lǐng)域中的應(yīng)用。傳統(tǒng)伺服機(jī)構(gòu)屬于模擬伺服機(jī)構(gòu),通常采用電信號(hào)控制和液壓動(dòng)力相結(jié)合的方式,通過模擬信號(hào)直接進(jìn)行控制,如文獻(xiàn)[2-3]所述,這種伺服機(jī)構(gòu)雖具有交流伺服系統(tǒng)所具有的許多優(yōu)點(diǎn),但往往操作復(fù)雜、信號(hào)干擾和延時(shí)較大,同時(shí)信號(hào)精度、可靠性和安全性都不理想。根據(jù)文獻(xiàn)[4-5]可知,在伺服機(jī)構(gòu)控制中引入數(shù)字技術(shù),采用數(shù)字信號(hào)方式對(duì)伺服機(jī)構(gòu)進(jìn)行控制可彌補(bǔ)模擬信號(hào)控制方式的不足,為滿足噴管測控試驗(yàn)中對(duì)數(shù)字伺服機(jī)構(gòu)進(jìn)行控制的需要,需對(duì)噴管擺動(dòng)控制系統(tǒng)進(jìn)行數(shù)字化設(shè)計(jì)和實(shí)現(xiàn),還需同時(shí)滿足1553B總線傳輸要求[6],實(shí)現(xiàn)對(duì)1553B總線上2套伺服機(jī)構(gòu)進(jìn)行同時(shí)控制和反饋信號(hào)采集。進(jìn)行噴管擺動(dòng)控制系統(tǒng)的數(shù)字化設(shè)計(jì)和實(shí)現(xiàn)能夠降低噴管控制試驗(yàn)中控制與反饋信號(hào)的傳輸干擾和延時(shí),并提高信號(hào)的精確性,從而提高試驗(yàn)系統(tǒng)的可靠性,保障試驗(yàn)順利完成。開展噴管測控系統(tǒng)數(shù)字化設(shè)計(jì)研究能夠促進(jìn)噴管擺動(dòng)虛擬試驗(yàn)與實(shí)物試驗(yàn)的進(jìn)一步結(jié)合,對(duì)促進(jìn)噴管擺動(dòng)虛擬試驗(yàn)的發(fā)展具有重要意義。
基于1553B總線進(jìn)行噴管測控系統(tǒng)設(shè)計(jì),不僅能滿足試驗(yàn)的可靠性要求,還具有以下優(yōu)良特點(diǎn)[7]:實(shí)時(shí)性好、合理的差錯(cuò)控制措施和特有的方式命令、總線效率高、具有命令/響應(yīng)以及“廣播”通信方式,適合于集中控制的分布式處理系統(tǒng)。
1 硬件系統(tǒng)設(shè)計(jì)
1.1 系統(tǒng)總體設(shè)計(jì)
進(jìn)行噴管測控系統(tǒng)的數(shù)字化設(shè)計(jì),首先要求1553B總線上所有設(shè)備能夠?qū)崿F(xiàn)穩(wěn)定快速的數(shù)據(jù)通信功能,并在各設(shè)備之間實(shí)現(xiàn)預(yù)定的控制策略和控制規(guī)則,以達(dá)到總線控制器對(duì)伺服機(jī)構(gòu)運(yùn)動(dòng)狀態(tài)進(jìn)行控制和測量的目標(biāo)。其次要求噴管擺動(dòng)控制系統(tǒng)能夠滿足對(duì)伺服機(jī)構(gòu)動(dòng)態(tài)性能進(jìn)行測量的指標(biāo)要求[8],具體指標(biāo)包括:伺服機(jī)構(gòu)反饋信號(hào)的延時(shí)時(shí)間、所有信號(hào)的干擾以及啟動(dòng)信號(hào)的啟動(dòng)時(shí)間等。此外,噴管擺動(dòng)控制系統(tǒng)實(shí)現(xiàn)數(shù)字化設(shè)計(jì)后還必須具有較高的可靠性和穩(wěn)定性。依據(jù)1553B總線基本結(jié)構(gòu)和噴管擺動(dòng)控制系統(tǒng)要求實(shí)現(xiàn)的硬件系統(tǒng)設(shè)計(jì)方案如圖1所示。
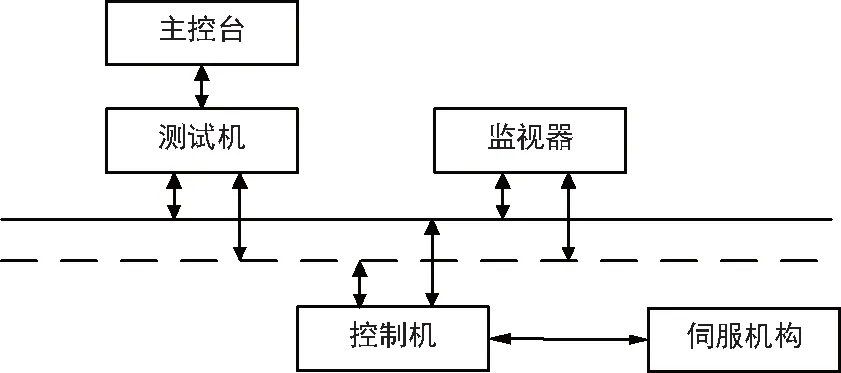
圖1 噴管擺動(dòng)控制系統(tǒng)組成
噴管擺動(dòng)控制的硬件系統(tǒng)組成包括測試機(jī)、控制機(jī)、遠(yuǎn)程數(shù)字信號(hào)傳輸系統(tǒng)、1553B連接線路、耦合器和供電電源等部件[9]。整套系統(tǒng)采用分布式部署模式,其中控制機(jī)、耦合器布置在試驗(yàn)臺(tái)側(cè)的隔離間,并采取減震抗沖擊保護(hù)措施,測試機(jī)、電源等布置在操作間,實(shí)現(xiàn)遠(yuǎn)程控制。整套系統(tǒng)發(fā)送和應(yīng)答指令信息全部采用1553B總線協(xié)議,并由1553B總線耦合器和線纜連接。
控制機(jī)是噴管擺動(dòng)控制系統(tǒng)的核心設(shè)備,實(shí)現(xiàn)對(duì)伺服機(jī)構(gòu)的核心控制功能[10],設(shè)置為下位機(jī),負(fù)責(zé)接收測試機(jī)的啟動(dòng)指令和控制噴管擺動(dòng)。根據(jù)文獻(xiàn)[11-12]進(jìn)行控制機(jī)的設(shè)計(jì),實(shí)現(xiàn)的具體功能包括接收測試機(jī)指令信號(hào)、返回接收狀態(tài)字、控制伺服機(jī)構(gòu)擺動(dòng)、采集伺服機(jī)構(gòu)運(yùn)動(dòng)狀態(tài)信息和向測試機(jī)返回控制信息等功能。
測試機(jī)設(shè)置為上位機(jī),實(shí)現(xiàn)遠(yuǎn)程控制功能,負(fù)責(zé)接收主控臺(tái)啟動(dòng)信號(hào),在控制前將擺動(dòng)信號(hào)加載到控制機(jī),控制過程中遠(yuǎn)程監(jiān)控控制機(jī)返回的伺服機(jī)構(gòu)狀態(tài)信息,實(shí)現(xiàn)的具體功能包括:發(fā)送指令信號(hào)、接收狀態(tài)字、接收試驗(yàn)數(shù)據(jù)、接收和反饋控制臺(tái)啟控信號(hào)、傳輸啟動(dòng)信號(hào)給控制機(jī)等,同時(shí)能夠?qū)崿F(xiàn)對(duì)伺服機(jī)構(gòu)的供電和狀態(tài)檢測。
監(jiān)視機(jī)的硬件配置與控制機(jī)相同,直接與1553B總線相連接。監(jiān)視機(jī)的硬件設(shè)計(jì)參考了文獻(xiàn)[13-14]的研究內(nèi)容,并設(shè)置了與總線斷開的功能,因此能夠根據(jù)試驗(yàn)需要,方便地將監(jiān)視機(jī)從總線斷開,實(shí)現(xiàn)增加監(jiān)視機(jī)、刪除監(jiān)視機(jī)和監(jiān)視機(jī)與控制機(jī)互換等功能。
噴管擺動(dòng)控制系統(tǒng)數(shù)字化設(shè)計(jì)中,采用1553B數(shù)據(jù)線纜作為系統(tǒng)控制線纜;采用工業(yè)級(jí)朝陽電源作為控制機(jī)和伺服機(jī)構(gòu)供電電源;采用中斷控制方式實(shí)現(xiàn)控制機(jī)、監(jiān)視機(jī)的時(shí)序控制;控制機(jī)將控制信息和采集到的伺服機(jī)構(gòu)狀態(tài)信息實(shí)時(shí)傳送到測試機(jī),測試機(jī)對(duì)試驗(yàn)數(shù)據(jù)自動(dòng)存盤,避免數(shù)據(jù)丟失。
1.2 數(shù)字信號(hào)傳輸設(shè)計(jì)
由于推力向量控制試驗(yàn)中會(huì)產(chǎn)生較大的噪聲和強(qiáng)烈震動(dòng),控制系統(tǒng)需設(shè)計(jì)成遠(yuǎn)程控制方式,即測試機(jī)遠(yuǎn)程啟控控制機(jī),控制機(jī)遠(yuǎn)距離控制伺服機(jī)構(gòu)。其中測試機(jī)與控制機(jī)之間傳輸距離長約數(shù)百米,控制機(jī)與伺服機(jī)構(gòu)之間距離長約數(shù)十米。因而實(shí)現(xiàn)長距離的數(shù)據(jù)傳輸是實(shí)現(xiàn)噴管擺動(dòng)控制系統(tǒng)數(shù)字化的一個(gè)關(guān)鍵部分。設(shè)計(jì)中針對(duì)控制特點(diǎn)和傳輸距離采用2種傳輸方式實(shí)現(xiàn):光纖傳輸和1553B總線傳輸。
測試機(jī)和控制機(jī)之間的傳輸采用單模光纖作為傳輸媒介,采用TCP/IP協(xié)議作為傳輸協(xié)議[15]。這種傳輸方式成熟穩(wěn)定,既能保證傳輸?shù)乃俣龋瑫r(shí)也能保證傳輸?shù)目煽啃裕軌蚪档蛡鬏敵杀荆m合于長距離傳輸。
控制機(jī)與伺服機(jī)構(gòu)之間距離較短,實(shí)現(xiàn)對(duì)伺服機(jī)構(gòu)的直接控制,參考文獻(xiàn)[16-17]進(jìn)行1553B總線傳輸設(shè)計(jì),采用1553B總線線纜直接連接控制機(jī)和伺服機(jī)構(gòu),總線上所有設(shè)備全部運(yùn)行1553B總線協(xié)議完成通信,同時(shí)所有設(shè)備全部通過耦合器接口連接。
2 軟件系統(tǒng)設(shè)計(jì)
噴管擺動(dòng)控制系統(tǒng)軟件設(shè)計(jì)中采用指令/響應(yīng)異步工作方式實(shí)現(xiàn)[18],其中控制機(jī)采用主動(dòng)式通信方式與測試機(jī)通信,即服務(wù)請(qǐng)求機(jī)制。當(dāng)控制機(jī)有數(shù)據(jù)需要傳送時(shí),首先請(qǐng)求測試機(jī)將消息發(fā)送主動(dòng)權(quán)交給控制機(jī),然后控制機(jī)將伺服機(jī)構(gòu)狀態(tài)信息在較小的時(shí)間延時(shí)內(nèi)傳送給測試機(jī)。控制機(jī)向測試機(jī)傳送伺服機(jī)構(gòu)運(yùn)動(dòng)狀態(tài)信息的工作過程如下:將伺服機(jī)構(gòu)的反饋電位計(jì)信號(hào)通過A/D轉(zhuǎn)換后存放在指定的數(shù)據(jù)存儲(chǔ)器緩沖區(qū)中,同時(shí)將發(fā)送請(qǐng)求位和狀態(tài)字相應(yīng)位設(shè)置為高電平,向測試機(jī)請(qǐng)求發(fā)送消息;測試機(jī)采取查詢方式接收控制機(jī)請(qǐng)求信號(hào),在每個(gè)總線幀開始時(shí)段查詢控制機(jī)的服務(wù)請(qǐng)求,并根據(jù)狀態(tài)字安排相應(yīng)的消息發(fā)送。這種通信方式能夠保證消息傳輸?shù)膶?shí)時(shí)性,同時(shí)能夠保證系統(tǒng)的同步運(yùn)行和降低系統(tǒng)運(yùn)行負(fù)荷,避免產(chǎn)生較大的時(shí)延。
數(shù)字化的噴管擺動(dòng)控制系統(tǒng)通信流程圖如圖2所示。
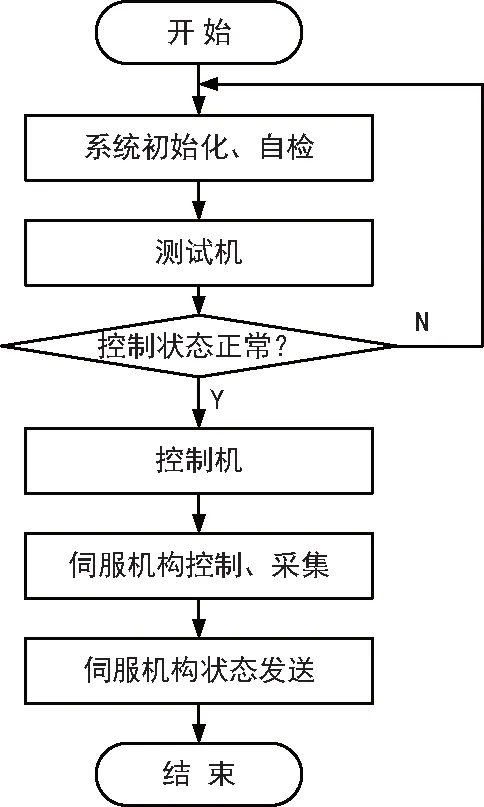
圖2 通信流程
噴管擺動(dòng)控制系統(tǒng)軟件的編程實(shí)現(xiàn)中,根據(jù)各設(shè)備的功能特點(diǎn)分別采用不同的語言實(shí)現(xiàn),測試機(jī)客戶端軟件的編程采用Delphi語言編寫,控制機(jī)和測試機(jī)之間的通信協(xié)議采用TCP/IP傳輸協(xié)議實(shí)現(xiàn)。測試機(jī)軟件實(shí)現(xiàn)的功能包括:1553B總線上各設(shè)備之間的接口檢查、自檢等指令交互;啟控前實(shí)現(xiàn)軟件設(shè)置、控制波形的編制與下載;啟控后實(shí)現(xiàn)數(shù)據(jù)波形的監(jiān)視等[19],測試機(jī)操作界面如圖3所示。
圖3 測試機(jī)操作界面
控制機(jī)服務(wù)端軟件的編程實(shí)現(xiàn)采用C++Builder2007進(jìn)行編寫,主要實(shí)現(xiàn)與伺服機(jī)構(gòu)的接口檢查、自檢等指令的交互,以及實(shí)現(xiàn)發(fā)控等一系列的動(dòng)作,并把交互的結(jié)果通過遠(yuǎn)程傳輸?shù)綔y試機(jī)[20],控制機(jī)操作界面如圖4所示。
圖4 控制機(jī)操作界面
3 系統(tǒng)測試
3.1 功能驗(yàn)證
對(duì)噴管測控系統(tǒng)進(jìn)行功能驗(yàn)證,驗(yàn)證平臺(tái)包括伺服作動(dòng)器、地面能源系統(tǒng)和遠(yuǎn)距離傳輸系統(tǒng)等,均為實(shí)際試驗(yàn)用設(shè)備。驗(yàn)證的功能包括1553B總線通信功能、測試機(jī)信號(hào)編輯功能、測試機(jī)與控制機(jī)的遠(yuǎn)程通信、控制機(jī)對(duì)作動(dòng)器的控制以及控制機(jī)采集作動(dòng)器狀態(tài)信息等,驗(yàn)證結(jié)果如表1所示。
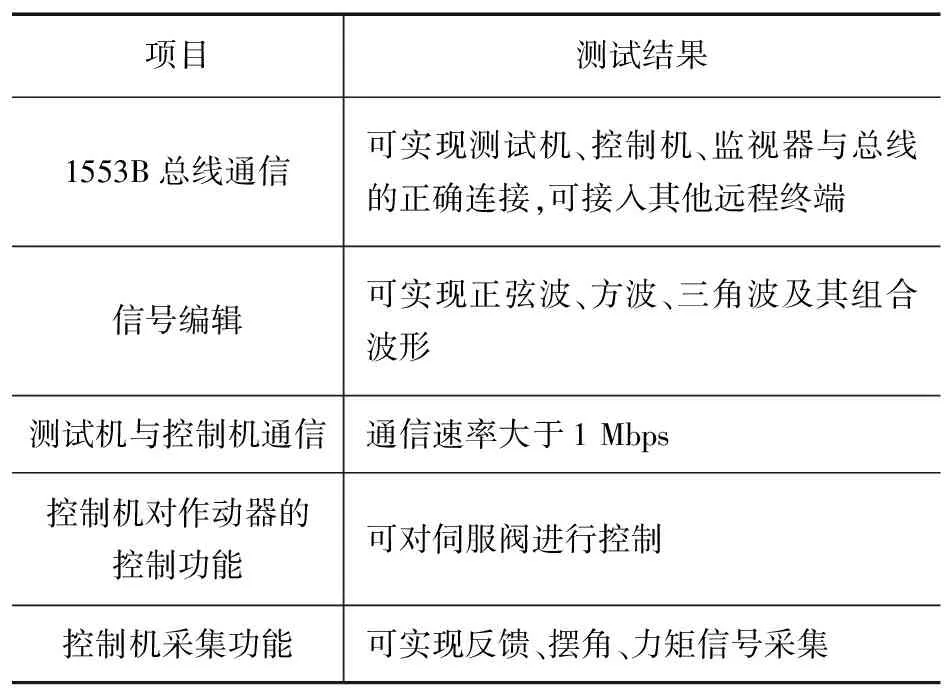
表1 功能驗(yàn)證結(jié)果
根據(jù)表1所得測試結(jié)果,可以得出所實(shí)現(xiàn)測控系統(tǒng)具備普通測控系統(tǒng)的各項(xiàng)測控功能,各組成設(shè)備能夠與1553B總線設(shè)備進(jìn)行正確通信,因此可用于對(duì)1553B總線數(shù)字伺服作動(dòng)器進(jìn)行測控,彌補(bǔ)了傳統(tǒng)伺服測控方式的不足。
3.2 延時(shí)測試
反饋延時(shí)是衡量伺服測控性能的一個(gè)重要指標(biāo),反饋延時(shí)過大可能導(dǎo)致測控系統(tǒng)無法實(shí)現(xiàn)閉環(huán)控制,引起噴管擺動(dòng)試驗(yàn)失敗,造成巨大損失。因此反饋延時(shí)必須盡量短,且不能超過一定范圍。由于測控試驗(yàn)波形可由正弦波、方波、梯形波及其組合波形構(gòu)成,因此采用上述波形對(duì)測控系統(tǒng)進(jìn)行反饋延時(shí)測試,并與傳統(tǒng)的模擬伺服測控系統(tǒng)反饋延時(shí)進(jìn)行對(duì)比,統(tǒng)計(jì)結(jié)果如表2所示。

表2 反饋延時(shí)測試結(jié)果
由表2能夠得出論文所實(shí)現(xiàn)的測控系統(tǒng)反饋延時(shí)與原測控系統(tǒng)相比平均降低0.033 s,其原因是所實(shí)現(xiàn)的系統(tǒng)采用了更快處理速度的元器件,并采用了1553B數(shù)字總線實(shí)現(xiàn)數(shù)據(jù)交互,因此提高了噴管測控試驗(yàn)的實(shí)時(shí)性和可靠性。
3.3 幅值測試
反饋幅值能夠表示出伺服作動(dòng)器的實(shí)際伸縮長度,即反映噴管的實(shí)際擺動(dòng)位置,是噴管控制的實(shí)際效果,因此用作測控系統(tǒng)的測試指標(biāo)。對(duì)所設(shè)計(jì)的測控系統(tǒng)的反饋幅值進(jìn)行測試,并與原測控系統(tǒng)反饋幅值及信號(hào)幅值進(jìn)行對(duì)比,如表3所示。
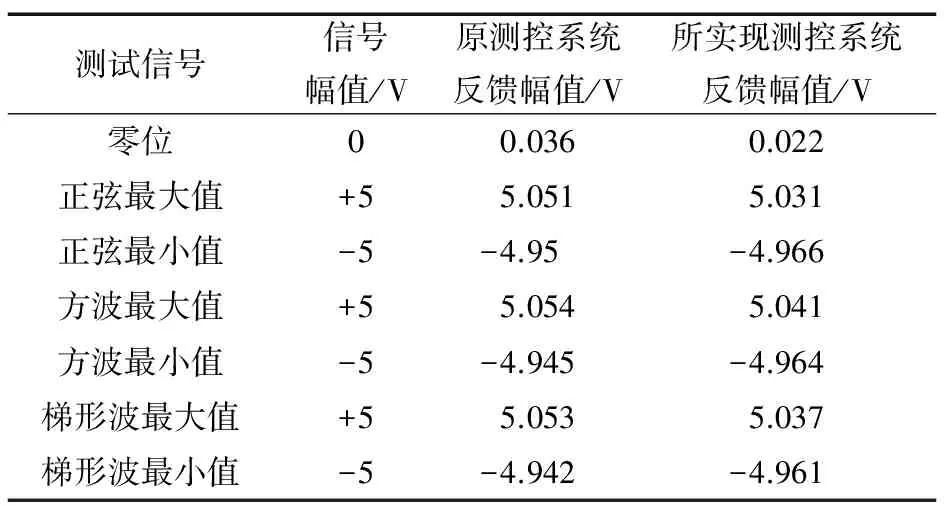
表3 反饋幅值測試結(jié)果
根據(jù)表3可知,針對(duì)噴管測控波形的零位和3個(gè)基本波形的極值點(diǎn)進(jìn)行幅值測試時(shí),實(shí)現(xiàn)的測控系統(tǒng)反饋幅值均優(yōu)于原測控系統(tǒng),反饋幅值平均誤差值降低到0.015 V,與原測控系統(tǒng)的平均誤差值0.02 V相比更接近于控制信號(hào),因此所設(shè)計(jì)的測控系統(tǒng)具有更好的測控效果。
4 結(jié)束語
基于1553B總線開展噴管擺動(dòng)測控系統(tǒng)的數(shù)字化設(shè)計(jì),由于采用了數(shù)字信號(hào)的控制和傳輸方式,在具備了對(duì)數(shù)字伺服機(jī)構(gòu)控制功能的同時(shí)。所設(shè)計(jì)的測控系統(tǒng)能夠降低反饋信號(hào)的傳輸延時(shí),并能夠提高控制信號(hào)的控制效果。此外,由于1553B總線具有備份控制和容錯(cuò)機(jī)制等多項(xiàng)優(yōu)點(diǎn),因此較大地提高了所設(shè)計(jì)的噴管擺動(dòng)測控系統(tǒng)的可靠性,并使該測控系統(tǒng)可進(jìn)行分布式部署,進(jìn)一步使控制機(jī)近距離控制伺服機(jī)構(gòu),使伺服機(jī)構(gòu)能夠更好地跟蹤指令信號(hào),有助于提高試驗(yàn)的控制精度。采用所設(shè)計(jì)的數(shù)字化噴管擺動(dòng)控制系統(tǒng)已參加了多次試驗(yàn),傳輸延時(shí)和控制精度均優(yōu)于傳統(tǒng)的模擬控制系統(tǒng)。
[1] 劉華偉,葉正寅,葉坤.火箭發(fā)動(dòng)機(jī)噴管擺動(dòng)對(duì)側(cè)向載荷的影響[J].固體火箭技術(shù),2016(5):619-624.
[2] 許學(xué)超.汽輪機(jī)新型電液伺服機(jī)構(gòu)設(shè)計(jì)、仿真及實(shí)驗(yàn)研究[D].哈爾濱:哈爾濱工程大學(xué),2013.
[3] 許仕偉.電液伺服機(jī)構(gòu)密封可靠性分析及其試驗(yàn)研究[D].杭州:浙江理工大學(xué),2012.
[4] 崔勇,黃元生.一種擺動(dòng)噴管電動(dòng)伺服機(jī)構(gòu)的設(shè)計(jì)及應(yīng)用[J].制造業(yè)自動(dòng)化,2012(18):52-55.
[5] 程相,王書銘,左哲清.一種數(shù)字伺服閥驅(qū)動(dòng)機(jī)構(gòu)的性能研究[J].液壓與氣動(dòng),2015(9):101-105.
[6] 孟慶華,王興梅.基于FPGA的1553B總線系統(tǒng)設(shè)計(jì)[J].無線電工程,2016,46(6):72-75.
[7] 劉云峰,繆棟,劉凡軍.1553B總線及其在電液伺服系統(tǒng)中的應(yīng)用[J].機(jī)床與液壓,2004(9):106-108.
[8] 馬建偉.精密電液伺服閥幾何因素與性能指標(biāo)映射關(guān)系研究[D].大連:大連理工大學(xué),2011.
[9] 謝偉,張蕾,蘭天,等.一種伺服測試領(lǐng)域1553B總線的實(shí)現(xiàn)架構(gòu)[J].計(jì)算機(jī)測量與控制,2016(6):128-132.
[10] 楊衛(wèi)軍,李釗,許化龍,等.1553B網(wǎng)絡(luò)BC的SPN建模與分析[J].無線電工程,2009,39(2):16-17.
[11] 顏學(xué)龍,梅明.基于1553B總線協(xié)議IP核的設(shè)計(jì)[J].半導(dǎo)體技術(shù),2007,32(5):426-429.
[12] 王一達(dá).SoC驗(yàn)證平臺(tái)中1553B總線控制器設(shè)計(jì)[D].哈爾濱:哈爾濱工業(yè)大學(xué),2013.
[13] 羅運(yùn)虎,章寧,周濤,等.1553B總線監(jiān)視器中數(shù)據(jù)讀取與解析方法研究[J].測控技術(shù),2013(10):33-35.
[14] 張子明.基于BU-61580的1553B總線通訊模塊的設(shè)計(jì)和研制[D].南京:南京航空航天大學(xué),2014.
[15] 魏晨曦.TCP/IP技術(shù)在航天測控通信中的應(yīng)用[J].無線電工程,2005,35(8):21-30.
[16] 曹曉麗,谷春英.1553B總線傳輸機(jī)制建模及性能分析[J].科學(xué)技術(shù)與工程,2013(9):2 562-2 565.
[17] 劉騏銘,馮旭哲.星載子網(wǎng)1553B總線數(shù)據(jù)傳輸與管理[J].宇航計(jì)測技術(shù),2015(5):64-69.
[18] 蔡敬坤,呂兵兵,吳健.設(shè)計(jì)模式在飛行器高速1553B總線軟件設(shè)計(jì)中的應(yīng)用[J].工業(yè)儀表與自動(dòng)化裝置,2016(4):89-91.
[19] 于東超.LXI總線1553B通信模塊研制[D].哈爾濱:哈爾濱工業(yè)大學(xué),2015.
[20] 王程崢,李文魁,宋衛(wèi)紅,等.艦船綜合導(dǎo)航模擬器1553B總線控制器軟件開發(fā)[J].船電技術(shù),2012(5):43-46.
Digital Design and Realization of Measurement and Control System of Nozzle Based on 1553B Bus
CHU Fu-gang,YANG Quan-hai,KANG Ning,HAN Yong
(The601stInstituteofthe6thAcademyofChinaAerospaceScienceandIndustryCorporation,HohhotInnerMongolia010076,China)
10.3969/j.issn.1003-3106.2017.08.16
褚福剛,楊全海,康寧,等.1553B總線噴管測控系統(tǒng)數(shù)字化設(shè)計(jì)與實(shí)現(xiàn)[J].無線電工程,2017,47(8):67-70.[CHU Fugang,YANG Quanhai,KANG Ning,et al.Digital Design and Realization of Measurement and Control System of Nozzle Based on 1553B Bus[J].Radio Engineering,2017,47(8):67-70.]
2017-03-24
國防基礎(chǔ)科研基金資助項(xiàng)目(A0420133311) 。
V416
A
1003-3106(2017)08-0067-04
褚福剛 男,(1983—),碩士,工程師。主要研究方向:推力向量測控。
楊全海 男,(1982—),碩士,工程師。主要研究方向:推力向量測控。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
