基于擴張狀態觀測器的滾轉通道自動駕駛儀設計
2017-07-20 08:26:30王文麗王黎
物聯網技術 2017年7期
王文麗++王黎
摘 要:在導彈飛行過程中,滾轉通道自動駕駛儀主要用于抑制彈體誘導滾轉力矩產生的干擾,對彈體偽滾轉角或滾轉角速度進行穩定控制。由于一般戰術導彈誘導滾轉力矩系數較小,根據風洞試驗或CFD計算得到的誘導滾轉力矩系數存在較大誤差,無法準確建模,導彈在實際飛行過程中,較大的誘導滾轉力矩將對彈體滾轉穩定控制造成較大影響,甚至導致彈體滾轉通道發散。文中提出了一種基于擴張狀態觀測器的滾轉通道自動駕駛儀設計方法,可以在導彈飛行過程中對滾轉通道干擾進行實時估計,并在滾轉舵偏中對滾轉誘導力矩進行補償,改善了彈體滾轉通道的穩定控制性能。
關鍵詞:擴張狀態觀測器;滾轉通道;自動駕駛儀;穩定控制
中圖分類號:TP39;TJ765 文獻標識碼:A 文章編號:2095-1302(2017)07-00-02
4 結 語
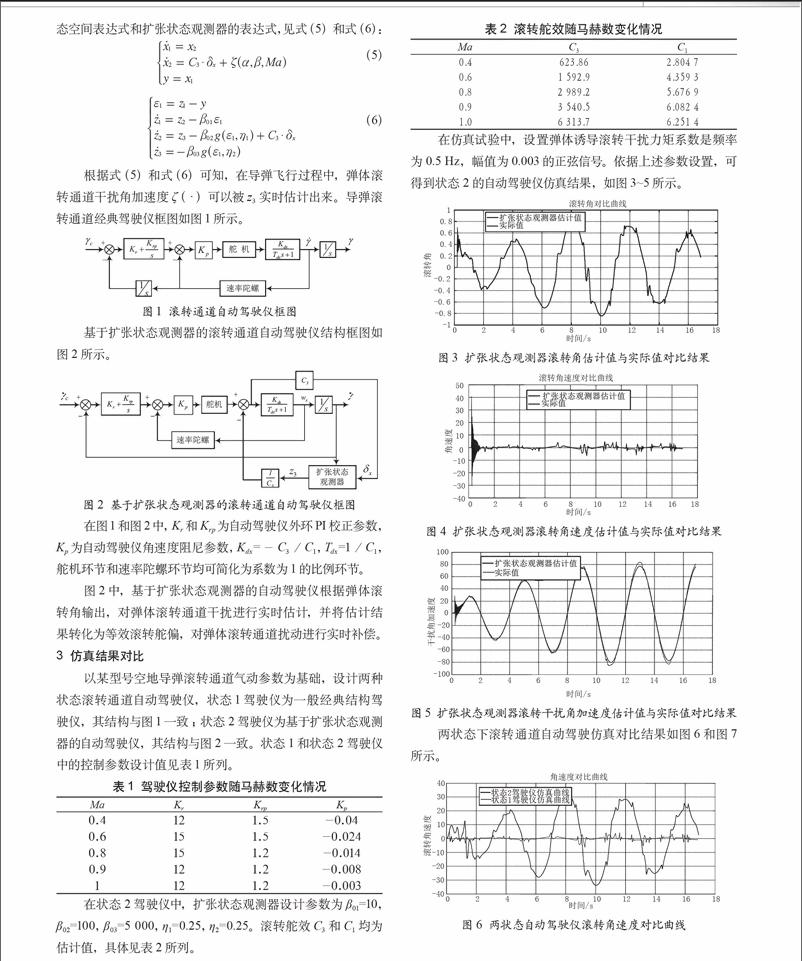
仿真分析表明擴張狀態觀測器能較好地對滾轉角、滾轉角速度和滾轉角加速度進行估計,收斂速度快,精度較高。
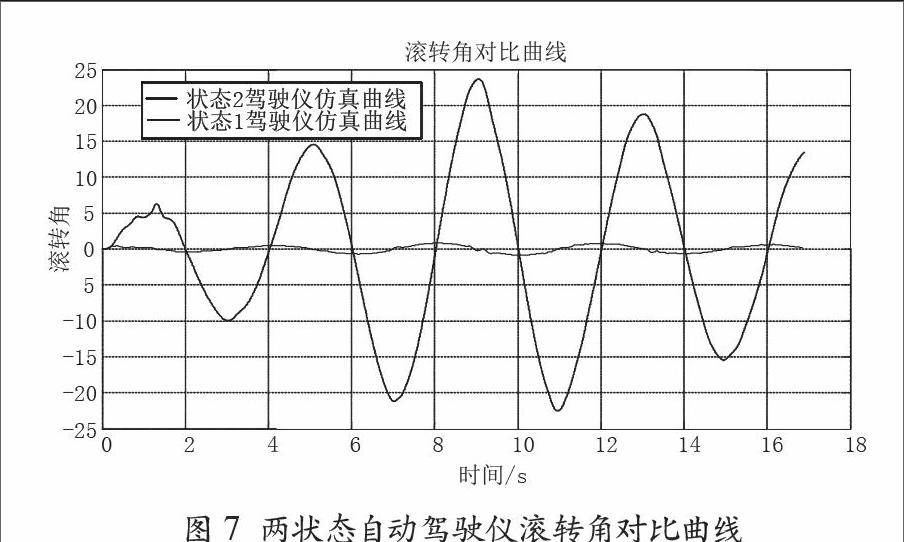
在彈體誘導滾轉力矩干擾存在時,基于擴張狀態觀測器的自動駕駛儀的滾轉角速度和滾轉角收斂速度快于經典自動駕駛儀仿真結果。
基于擴張狀態觀測器的自動駕駛儀能較好地抑制彈體誘導滾轉力矩干擾,在此駕駛儀狀態下仿真得到的滾轉角速度振蕩幅值遠小于經典自動駕駛儀仿真結果;同時滾轉角誤差控制也遠小于經典自動駕駛儀仿真結果。即基于擴張觀測器的滾轉通道駕駛儀控制效果優于一般的經典自動駕駛儀。
參考文獻
[1]錢學森,宋健.工程控制論[M].北京:科學出版社,2015.
[2]韓京清.自抗擾控制技術[J].前沿科學,2007(1):25-32.
[3]楊軍,楊晨,段朝陽.現代導彈制導控制系統設計[M].北京:航空工業出版社,2005.
[4]黃一,張文革.自抗擾控制器的發展[J].控制理論與應用,2002,19(4):485-492.
[5]韓京清.從PID技術到自抗擾控制技術[J].控制工程,2002,9(13):13-18.
[6]楊軍,楊晨,段朝陽.現代導彈制導控制系統設計[M].北京:航空工業出版社,2005.
[7]陳磊,劉永善.導彈滾轉自動駕駛儀設計與仿真[J].重慶三峽學院學報,2012(3):72-76.
[8]李彤,張士峰,楊華波,等.基于擴張狀態觀測器的小型固體火箭控制系統設計與驗證[J].固體火箭技術,2014(6):749-755.
