超(超)臨界機組低負荷時MFT動作原因分析及優化策略
2017-07-31 18:33:53袁世通
綜合智慧能源 2017年7期
關鍵詞:指令
袁世通
(大唐華中電力試驗研究所,鄭州 450000)
超(超)臨界機組低負荷時MFT動作原因分析及優化策略
袁世通
(大唐華中電力試驗研究所,鄭州 450000)
針對兩臺超臨界機組低負荷變工況運行中由于給水泵再循環閥開啟,造成機組給水流量低,觸發主燃料跳閘(MFT)信號的非停事件進行分析,設計了階梯式比例-積分-微分(PID)控制策略:給水泵入口流量較高時,再循環閥由PID自動控制;給水泵入口流量降至保護開啟定值時,再循環閥由流量閥位函數綜合控制。大大降低了再循環閥對給水流量的影響,提高了機組低負荷運行的安全性。
超(超)臨界機組;低負荷;主燃料跳閘;給水泵再循環閥;比例-積分-微分控制
0 引言
近幾年,受我國用電量增速放緩和發電總裝機容量(包括火電、水電、風電、光伏等)迅速增長的雙重影響,火電機組發電小時數不斷降低。由于電網運行中的負荷峰谷差不斷增大,作為發電主力的火電廠,其深度調峰的作用凸顯,各區域電網“兩個細則”的實施,更是加大了火電廠的調峰壓力。機組長期低負荷調峰,對運行設備的性能和控制系統的品質提出了更高的要求。本文對兩臺超臨界機組低負荷變工況運行中由于給水泵再循環閥開啟,造成機組給水流量低,觸發主燃料跳閘(MFT)信號的非停事件進行分析。
1 某650 MW超臨界機組MFT事件
1.1 事件經過
該機組鍋爐為北京巴布科克·威爾科克斯有限公司引進美國B&W 公司技術生產的B&WB-1900/25.4-M 型超臨界參數“W”火焰鍋爐。
2015-11-01 T 04:47:00,機組負荷為270 MW,鍋爐給水流量為698.00 t/h,主蒸汽溫度為565.00 ℃,選擇后中間點溫度為360.60 ℃,設定值為364.20 ℃。給水控制在自動方式正常調節,A,B側分離器出口溫度偏差為15.00 ℃左右。
04:49:42,選擇后中間點溫度為369.88 ℃,運行人員將中間點設定值的偏置由-3.85 ℃調整為-7.05 ℃,中間點溫度設定值變為357.43 ℃,設定值和測量值偏差為12.45 ℃,給水控制切手動(邏輯為偏差大于10.00 ℃,延時10 s給水控制切手動),此時給水統操指令為55.26%,鍋爐給水流量為731.50 t/h,此后運行人員開始手動操作給水指令。
04:51:47,鍋爐燃料量為118.00 t/h,運行人員手動將給水統操指令增加至57.05%,將鍋爐給水流量調整為992.92 t/h,控制邏輯中給水流量參考值為797.45 t/h,中間點溫度設定值為375.67 ℃,選擇后中間點溫度為377.59 ℃,運行人員將給水控制投入自動調節,此時A,B側分離器出口溫度偏差為25.00 ℃左右。
04:52:07,給水統操指令為56.40%,鍋爐給水流量為999.20 t/h,中間點溫度設定值為376.00 ℃,選擇后中間點溫度為372.50 ℃,運行人員將給水控制切手動,開始手動減小給水流量,此時A,B側分離器出口溫度偏差為29.00 ℃左右。
04:52:47,運行人員手動將給水統操指令減為48.83%,鍋爐給水流量為763.00 t/h,控制邏輯中給水流量參考值為808.49 t/h。此時A汽動給水泵(以下簡稱汽泵)轉速指令為3 402.69 r/min,實際轉速為3 804.72 r/min,B汽泵轉速指令為3 470.63 r/min,實際轉速為3 878.67 r/min,兩臺汽泵的轉速指令和實際轉速相差400.00 r/min左右,此時運行人員投入給水自動,給水統操指令在48.83%的基礎上開始增加。
04:53:06,給水統操指令增至53.27%,鍋爐給水流量為541.90 t/h,此時A汽泵轉速指令為3 612.37 r/min,實際轉速為3 745.32 r/min,B汽泵轉速指令為3 675.37 r/min,實際轉速為3 802.70 r/min,運行人員將給水控制切手動,開始增加給水統操指令。
04:53:09,給水統操指令增至53.84%,A汽泵轉速指令為3 662.37 r/min,實際轉速為3 746.80 r/min,B汽泵轉速指令為3 725.40 r/min,實際轉速為3 800.80 r/min,鍋爐給水流量為522.90 t/h,B汽泵進口流量為296.52 t/h(低于300.00 t/h),B汽泵最小流量閥超馳開啟。
04:53:37,鍋爐給水流量為424.80 t/h,給水流量低MFT保護動作。
1.2 事件分析
給水控制切手動后,由于運行人員手動大幅增減鍋爐給水流量,導致B汽泵最小流量閥因為B汽泵入口流量低于300.00 t/h而超馳聯開,鍋爐給水流量下降,最終導致給水流量低MFT保護動作,具體過程分析如下。
04:49:42,給水統操指令為55.26%,鍋爐給水流量為731.50 t/h。
04:52:07,手動增加給水統操指令至56.40%,鍋爐給水流量為999.20 t/h。
04:52:47,運行人員手動減小給水統操指令至48.83%,鍋爐給水瞬時流量為763.00 t/h,此時由于給水統操指令降速過快,且汽泵正常轉速調節需要一定時間,兩臺汽泵的轉速指令比實際轉速低400.00 r/min左右,給水指令對應的給水流量遠低于763.00 t/h。此后,雖然給水指令開始增加,但轉速指令仍然低于汽泵當前轉速,因此汽泵出力繼續下降,鍋爐給水流量繼續降低。
04:53:09,由于此前給水統操指令降得太低,雖然給水統操指令已增至53.84%,但此時對應的汽泵轉速指令仍低于汽泵實際轉速(A汽泵轉速指令為3 662.37 r/min,實際轉速為3 746.80 r/min; B汽泵轉速指令為3 725.40 r/min,實際轉速為3 800.80 r/min),因此汽泵出力并無增加,此時B汽泵進口流量降為296.52 t/h(低于300.00 t/h),B汽泵最小流量閥超馳開啟。此后,雖然給水統操指令繼續增加,但由于B汽泵最小流量閥超馳全開,鍋爐給水流量繼續降低。
最終在04:53:37,鍋爐給水流量降為424.80 t/h,給水流量低MFT保護動作。
2 某660 MW超超臨界機組MFT事件
2.1 事件經過
該機組使用上海鍋爐廠有限公司生產的SG-2000/26.15-M625 型鍋爐,為國產超超臨界參數變壓直流爐,一次再熱、固態排渣、全鋼結構、Π型布置,采用平衡通風以及四角切圓燃燒方式。
2016-07-15 T 01:37:02,鍋爐跳閘,跳閘首出為鍋爐給水流量低低。鍋爐跳閘前,機組負荷為330 MW,主給水流量約為920.0 t/h,A汽泵進口流量為560.0 t/h,B汽泵進口流量為520.0 t/h,但主給水流量波動較大。查詢現場歷史趨勢,B汽泵的低壓調節閥伺服閥存在卡澀現象,造成伺服指令與線性可變差動變壓器(LVDT)反饋存在較大遲延,從而產生伺服指令與LVDT反饋交替變化的正弦波振蕩,造成主給水流量波動較大。
01:25:12,由于給水流量波動,運行人員將B汽泵切手動調整,B汽泵實際轉速與指令存在偏差。
01:28:54,將B汽泵重新投入自動,A汽泵指令在40%~37%之間波動,B汽泵指令在41%~37%之間波動,給水流量在920.0~850.0 t/h之間波動,A汽泵入口流量在490.0~440.0 t/h之間波動,B汽泵入口流量在520.0~440.0 t/h之間波動。
01:34:00,運行人員將A汽泵切手動,A汽泵實際指令為38%,A汽泵入口流量穩定在530.0 t/h左右;B汽泵自動,指令自動由41%逐漸下減。
01:35:55 ,A,B汽泵入口流量分別為566.0,556.0 t/h,A,B汽泵轉速分別為4 115,4 126 r/min,此時運行人員再次將B汽泵切至手動控制,B汽泵指令為32%。
01:36:41,鍋爐給水流量下降至785.0 t/h,B汽泵入口流量降至358.0 t/h,低于設定值360.0 t/h, B汽泵再循環閥逐漸開啟。
01:36:42,B汽泵再循環流量降至348.6 t/h,B汽泵再循環閥全開,01:36:48主給水流量低于500.0 t/h,延時15 s后,鍋爐因給水流量低低跳閘。
2.2 原因分析
(1)因B汽泵伺服閥卡澀造成給水泵汽輪機伺服系統的遲緩率增大,伺服指令發出后,約30 s后LVDT反饋才動作,造成控制不及時,導致給水流量波動大。
(2)運行人員發現給水流量波動后,由于操作不當造成給水流量波動加大,導致B汽泵的入口流量低于350.0 t/h,B汽泵再循環閥快速打開,從而使主給水流量快速降至跳閘值。
(3)B汽泵運行時B汽泵再循環閥投入自動,再循環閥根據B汽泵入口流量設定值(360.0 t/h)與B汽泵入口流量偏差進行自動調節,逐漸開啟閥門。但是,B汽泵再循環調節閥的邏輯中有超弛開B汽泵再循環閥邏輯,超弛開的定值為350.0 t/h;01:36:42,B汽泵入口流量降至348.6 t/h,超弛信號起作用,再循環閥瞬間打開,從而使主給水流量降至跳閘值,所以該超弛邏輯是不合理的[1-2]。
3 給水泵再循環閥控制策略分析和優化
3.1 控制策略分析
這兩次機組非停的直接原因是給水流量波動時,達到汽泵入口流量低限,觸發給水泵再循環閥動作,快速開至100%,導致給水流量進一步降低,最終觸發MFT信號。給水泵再循環閥控制邏輯如圖1所示(圖中:DPU為分散處理單元)。
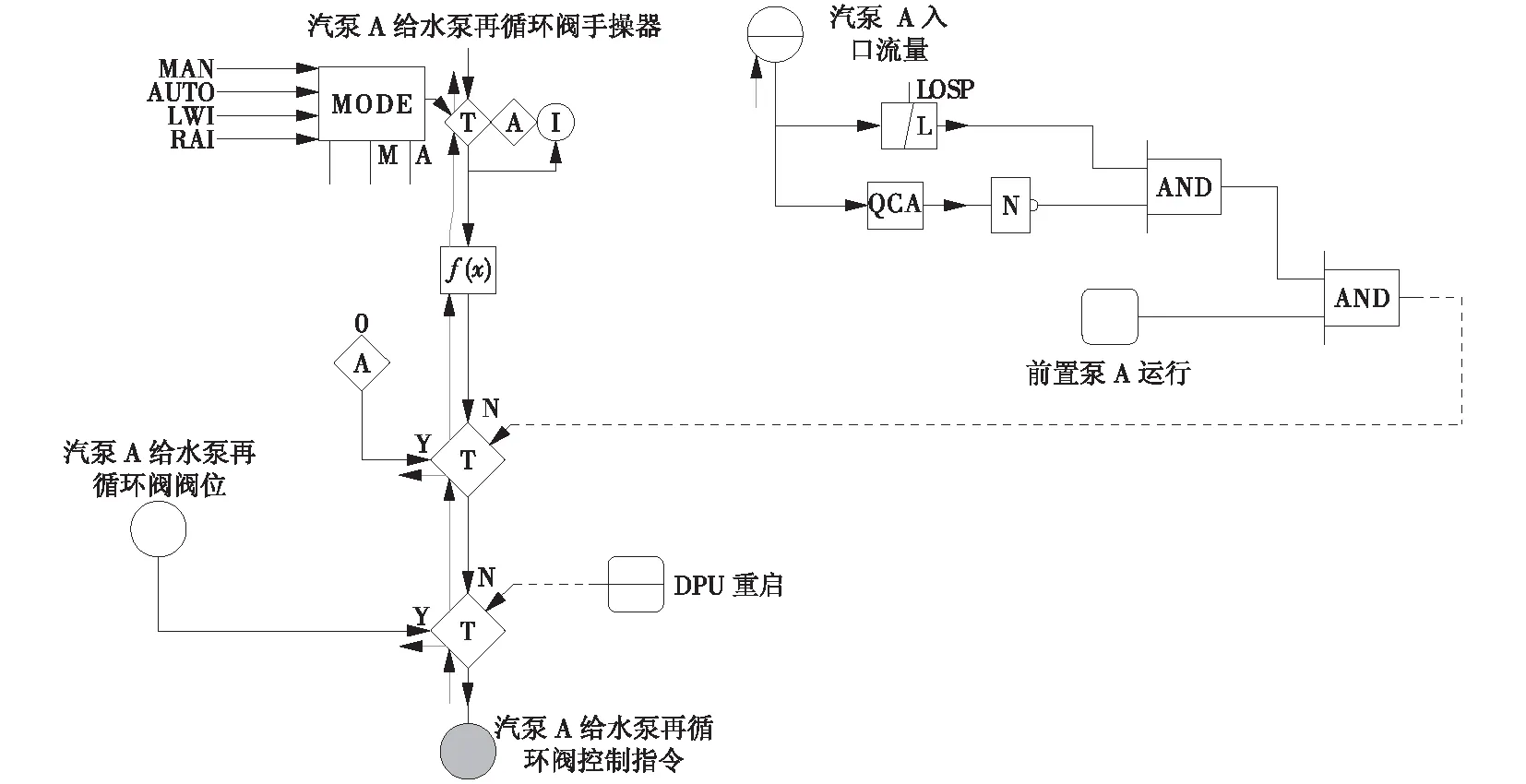
圖1 給水泵再循環閥控制邏輯
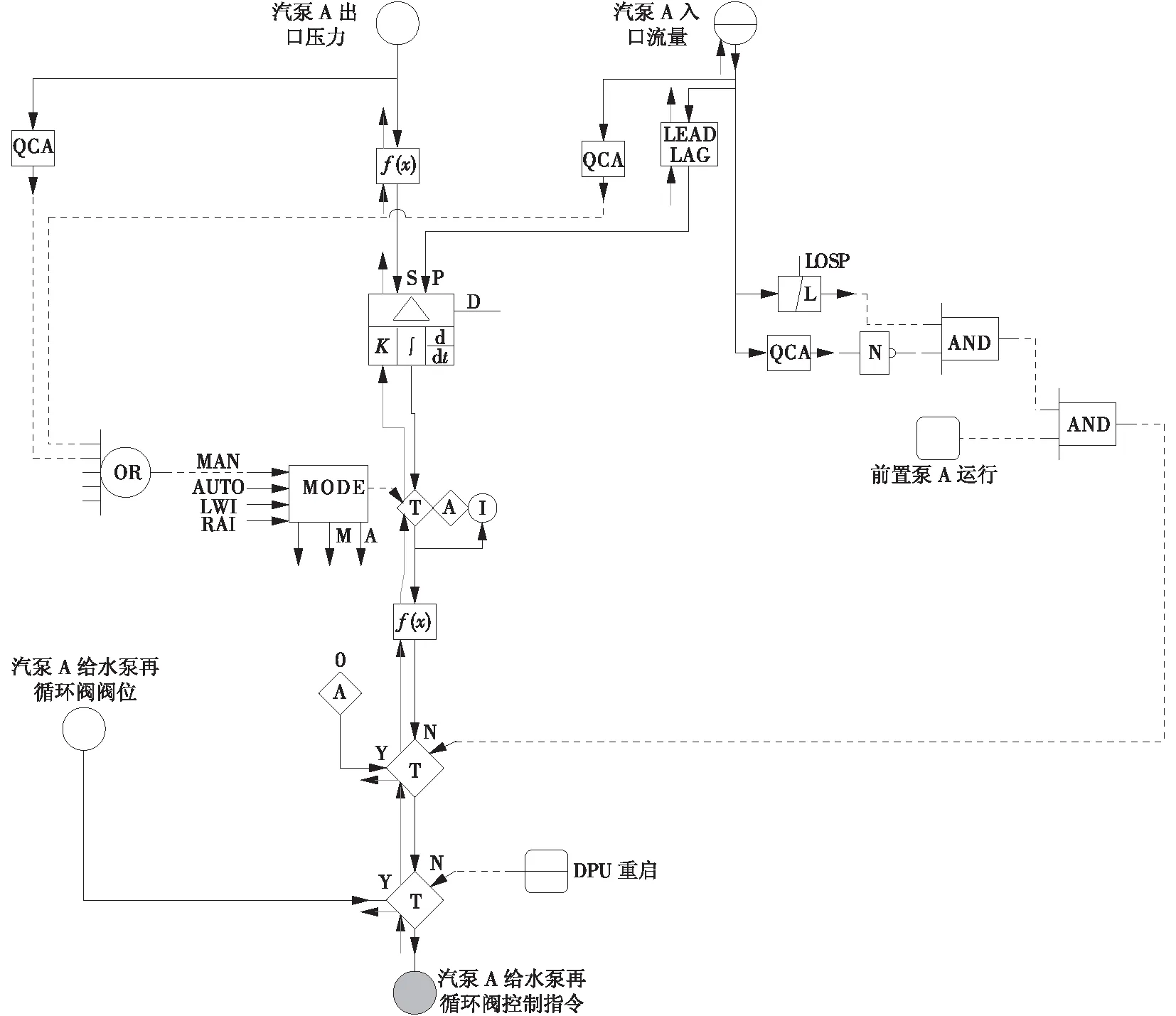
圖2 階梯式PID控制策略
3.2 控制策略優化方案
針對上述問題,設計了階梯式比例-積分-微分(PID)控制策略[3-4],該策略主要包括PID控制部分和流量閥位函數控制部分。給水泵入口流量較高時,再循環閥由PID自動控制;給水泵入口流量降至保護開啟定值時,再循環閥由流量閥位函數綜合控制;另外,該控制邏輯保留原有邏輯的超馳保護部分(適當降低流量低限設定值),控制邏輯如圖2所示。
在PID控制部分,通過給水泵出口壓力設定給
袁世通:超(超)臨界機組低負荷時MFT動作原因分析及優化策略
水泵入口最小流量定值,壓力-流量函數關系見表1,然后再通過PID自動調節給水泵再循環閥開度。
在流量閥位函數控制部分,通過給水泵的最小流量安全運行區域,確定給水泵轉速對應的再循環閥指令,轉速-開度函數關系見表2。
3.3 運行效果
按照階梯式PID控制策略對兩臺機組進行優化,機組低負荷運行時,給水泵再循環閥可以平穩開啟、關閉,大大降低了再循環閥對給水流量的影響,同時也降低了給水泵的電耗,提高了給水泵的經濟性和機組的安全性。

表1 壓力-流量函數關系

表2 轉速-開度函數關系
4 結束語
針對兩臺超臨界機組在低負荷變工況運行中,由于給水泵再循環閥開啟,造成機組給水流量低,觸發MFT信號的非停事件,提出了階梯式PID控制給水泵再循環閥的解決方案,經過控制系統的改進優化,取得了良好的效果。
[1]侯悅.300 MW機組汽動給水泵出口流量低的原因分析及處理[J].機電信息,2012(9):41,43.
[2]岳建華,謝建民,朱延海,等.火力發電廠給水泵再循環控制系統優化研究[J].中國電力,2014,47(9):11-17.
[3]畢明波,李國浦,閔兆儉.600 MW超臨界機組電動給水泵控制邏輯優化[J].內蒙古電力技術,2015,33(2):75-79.
[4]李波,張謙,殷建華,等.350 MW汽輪發電機組給水泵再循環閥控制策略優化[J].內蒙古電力技術,2016,34(1):45-48.
(本文責編:劉芳)
2017-05-12;
2017-06-21
TM 621
B
1674-1951(2017)07-0048-04
袁世通(1985—),男,河北武邑人,工程師,工學博士,從事發電廠復雜系統建模與控制方面的工作(E-mail:yst.19@163.com)。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27