鍋爐汽包液位模糊PID控制的應用研究
2017-07-31 20:40:33吳鵬彬李斌柏勇秦婷
裝備制造技術 2017年6期
吳鵬彬,李斌,柏勇,秦婷
(昌吉學院物理系,新疆昌吉831100)
裝備運行管理
鍋爐汽包液位模糊PID控制的應用研究
吳鵬彬,李斌,柏勇,秦婷
(昌吉學院物理系,新疆昌吉831100)
通過分析鍋爐汽包液位的擾動成因,在常規PID控制基礎上,引入模糊推理機制。借助仿真軟件搭建控制系統,依據現場工況推理整定出PID控制參數并運算得出控制仿真曲線。結果表明各動靜態指標有所提高,控制品質得到提升。結論對實際應用具有一定的參考價值。
汽包液位;模糊PID;仿真;參數優化
鍋爐在火電、化工、冶金等生產行業是主要的熱能和動力設備。在鍋爐的水汽回路中,如果汽包液位控制不及時,會造成停車,影響到安全生產。因此汽包液位的控制品質在鍋爐安全穩定的運行中至關重要[1-2]。工程中常采用便于整定的常規PID作為主控制器[3],然而汽包液位具有非線性、大滯后、容量滯后等特性,并且存在虛假水位等測量控制難點[4],實際工況中,由于負荷、汽泡等干擾,PID控制器容易脫離其工作點影響到控制指標,有時還會造成執行機構頻繁動作[5]。若借助模糊推理針對不同的偏差匹配出合適的PID參數,則可提高PID的工作性能,擴大其有效工作區間,從而改善系統的動靜態性能,提高控制品質。
1 汽包液位控制特性分析
汽包的正常液位一般為汽包中心線下50~200 mm之間,水位偏差范圍要求在[-50,50]mm.在汽包發生蒸汽過程中會受到多種干擾,包括給水流量干擾,汽包內的氣泡破裂引起的檢測量變化的干擾,汽機負荷變化引起的蒸汽轉化的干擾,這些干擾會導致液位波動變化較大。當液位產生偏差大需要盡快恢復恒定時,控制器應有較大輸出使電動閥開度增加,PID調節參數比例增益KP整定的就要大一點,液位偏差較小時,較大的KP又會使系統產生超調。所以單純一組PID參數的控制器,一旦偏離工作點,則控制效果明顯下降。如果利用模糊規則推理出PID控制器不同工作點的PID參數增量,依據不同的偏差區間對應不同的PID參數,控制器最終輸出值也會對應不同偏差,從而使得系統能跟隨液位波動實現分段化精準控制。
汽包液位與給水流量的動態關系可以用相當于一個積分環節和一階慣性環節組合的傳遞函數來描述,對新疆某企業自備電廠調試參數進行曲線擬合,作圖可得增益和慣性時間。傳遞函數見仿真結構圖。
2 模糊PID控制器設計
鍋爐汽包液位系統調節過程中,給水流量、蒸汽流量均可測定。負荷側蒸汽流量不可控,其干擾可通過前饋器減小,給水流量干擾經副調節器也可減小,所以主要在主調節器進行模糊PID控制。
模糊PID控制器結構如圖1所示,在常規PID控制的基礎上利用模糊推理整定參數。先將PID的三個參數與偏差e、偏差變化率ec建立一種模糊關系。系統在控制過程中,不斷檢測偏差e和偏差變化率ec,按照設定好的模糊邏輯推理出KP、Ki、Kd以適應不同的偏差區間和變化速率的PID.

圖1 汽包液位模糊PID控制結構
2.1 確定輸入輸出變量
模糊邏輯處理的過程包括:輸入模糊化、模糊推理計算和輸出解模糊。偏差e和偏差變化率ec足以表征系統動態特性,故可設計二維模糊控制器如圖1所示,輸出為KP、Ki、Kd,則PID控制器的KP、Ki、Kd實際可表示為:KP=KP0+△KP,Ki=Ki0+△Ki,Kd=Kdo+△Kd,式中,KP0、Ki0、Kdo為PID的最小工作點初始參數,經工程整定所得。
考慮到控制速度和精度的協調,將輸入e、ec劃分了7個模糊量,其子集為:{負大、負中、負小、零、正小、正中、正大},簡記為:{NB、NM、NS、ZO、PS、PM、PB},論域邊界為:[-6,6];輸出Kp、Ki、Kd劃分了3個模糊量,論域為:[-3,3]。量化因子和比例因子依據映射關系在仿真過程中調整。隸屬度關系選擇運算簡單的對稱三角型以提高響應速度。輸出清晰化過程采用更平滑的重心法以提高響應精度。
依據上述過程在Matlab中建立模糊結構如圖2所示。
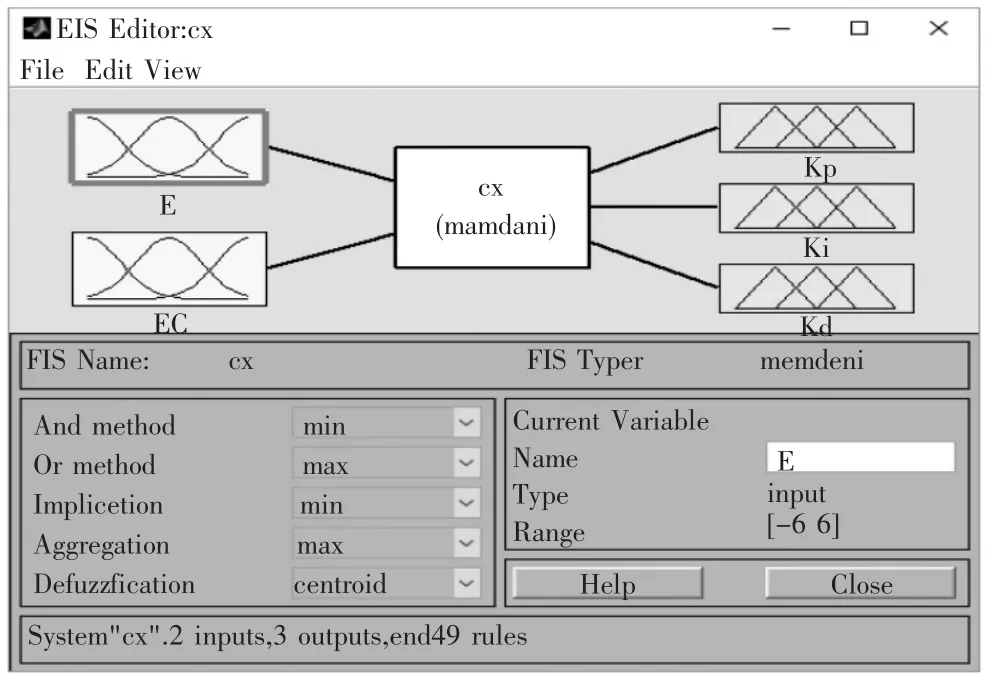
圖2 模糊推理結構FIS
2.2 模糊規則建立
在偏差糾正偏差的反饋原理基礎上,依據PID參數對系統控制指標的影響趨勢,結合汽包液位的動態控制特性,并在總結工程技術人員技術知識和整定經驗的基礎上確定了49條△Tp、△Ti、△Td輸出模糊規則,表1給出了部分規則描述。
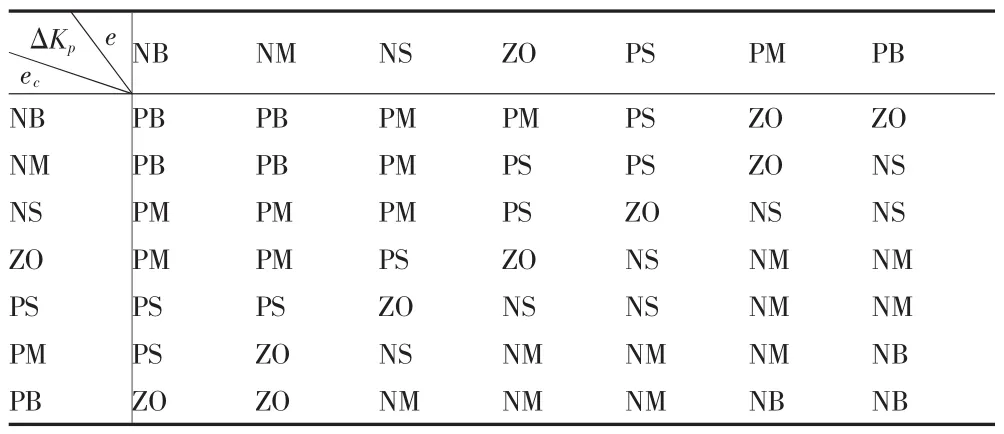
表1 ΔKp的模糊控制規則表
仿真運行過程中,鍋爐液位控制系統利用上述模塊控制規則完成對PID參數的在線自整定,不斷檢測偏差e和偏差變化率ec,以最快速度找出PID三個參數和e與ec的模糊關系。通過參數的在線調整使得模糊PID控制系統的響應速度、超調量、穩態誤差都比單一的PID控制或模糊控制效果更好。
3 系統仿真及分析
3.1 系統仿真
在MATLAB的Simulink環境中調用Fuzzy、PID等元件完成系統連接并進行相關參數設定,液位模型依據新疆某化工廠鍋爐汽水回路動態參數建立。為便于調試和分析,將Fuzzy控制器輸出進行封裝并將常規PID與模糊PID控制器輸出信號混合見圖3.

圖3 系統仿真結構圖
根據上述過程加入45單位的階躍定值側干擾,根據經驗整定PID參數初始值Kp=50、Ki=0.1、Kd=25.系統仿真結果如圖4所示。
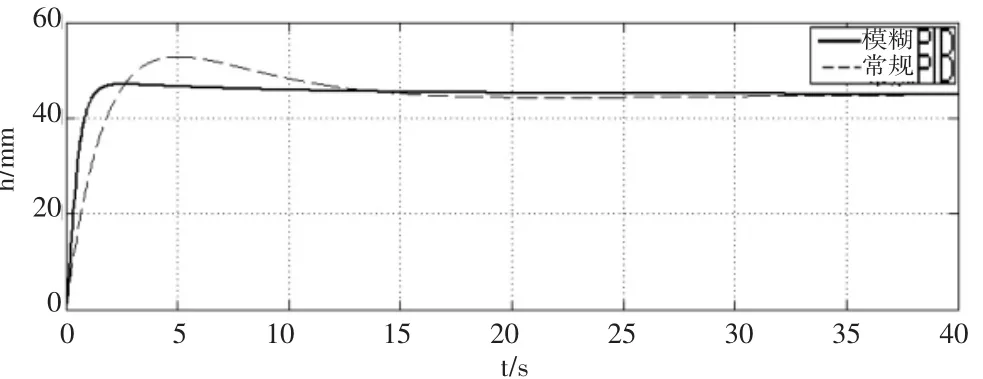
圖4 系統仿真曲線圖
3.2 結論分析
不同控制算法下的系統動態性能指標如表2所示。
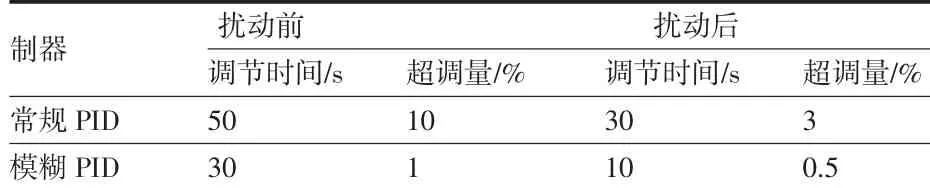
表2 性能指標
從兩種控制器的仿真曲線對比可以看出,模糊PID較之常規PID在鍋爐汽包液位控制中動靜態指標明顯提升,表現在響應迅速快,調節時間短,超調量比較小,使系統具有更好的動態性能和調節性能,增強了系統的魯棒性,對實際應用具有重要的借鑒意義。
[1]鄭志明.鍋爐汽包水位儀表的應用分析[J].儀表技術,2012(02):46-47,53.
[2]李文濤,劉麗霞.模糊PID算法在鍋爐汽包水位控制中的應用[J].包鋼科技,2010(01):50-53.
[3]石辛民,郝整清.模糊控制及其Matlab仿真[M].4版.北京:清華大學出版社,2008.
[4]李晶.鍋爐汽包水位模糊自適應控制及仿真[D].南京:南京理工大學,2015.
[5]王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術,2011(01):166-172.
Study on Application of Boiler Drum Water Level Control Based on Fuzzy PID
WU Peng-bin,LI Bin,BAI Yong,QIN Ting
(Department of Physics,Changji University,Changji Xinjiang 831100,China)
By analyzing the causes of disturbance of boiler liquid level,fuzzy inference mechanism is introduced on the basis of conventional PID control.With the help of simulation software,the control system is set up,and the PID control parameters are set up according to the working conditions of the field,and the control simulation curves are obtained.The results show that the dynamic and static indexes are improved,and the control quality is improved.Conclusion it has certain reference value for practical application.
boiler drum water;fuzzy PID;simulation;parameter optimization
TP273
A
1672-545X(2017)06-0202-03
2017-03-03
2016年新疆維吾爾自治區大學生創新創業訓練計劃項目(項目編號:201610997006);昌吉學院教學研究項目(項目編號:16jyyb005)
吳鵬彬(1994-),男,新疆伊犁人,本科,研究方向:能源與動力工程;李斌(1982-),男,新疆昌吉人,碩士,實驗員,主要從事自動化技術應用及仿真教學和研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2015年2期)2015-02-28 12:15:41