陀螺穩定平臺有限元模型建立研究
2017-07-31 20:40:34楊秀麗金大瑋劉小光陳淑清
裝備制造技術 2017年6期
楊秀麗,金大瑋,劉小光,陳淑清
(空軍航空大學,吉林長春130022)
陀螺穩定平臺有限元模型建立研究
楊秀麗,金大瑋,劉小光,陳淑清
(空軍航空大學,吉林長春130022)
為保證在仿真分析中對陀螺穩定平臺靜、動態性能分析的準確性,必須建立仿真度高而且計算簡單的有限元模型。針對平臺上零件數量多、種類多、連接形式多的特點,研究建立平臺有限元模型的關鍵技術。分別對軸承、電機、電位計、軸、桿以及零件之間的各種連接作出了合理的簡化處理,選取適合的單元種類劃分網格,選取滿足剛度和強度要求的材料,建立了符合仿真要求的平臺有限元模型。為平臺靜、動態性能分析及結構優化奠定了良好的基礎,也為多種零件、多種連接的有限元計算模型簡化提供了參考。
陀螺穩定平臺;有限元;模型簡化;網格劃分
采用現代的結構輔助設計技術,使用有限元仿真軟件對虛擬樣機進行靜、動態性能分析,能極大地縮短產品的研制周期,降低成本[1]。為了保證分析結果的準確性,必須建立仿真度高的有限元模型,而提高仿真度的勢必會提高模型的復雜度,復雜的模型不但對計算機硬件要求高,而且計算速度緩慢。所以如何建立一個仿真度高而且計算簡單的有限元模型便是一個值得研究的問題。
1 有限元模型建立原則
(1)有限元模型按照實際結構尺寸建立,以保證幾何數據與真實結構一致,但對于對結構影響不大的圓角和倒角等可以按照原則進行簡化,避免在有限元網格劃分時局部網格過密的問題,單元過多計算量加大,計算效率降低。
(2)在關鍵的受力部位,網格的劃分要密些,非關鍵部位本著能量等效原則,準確描述其等效單元體的質量,質心位置及連接剛度,使等效后的構件能真實的反映原構件的質量和剛度。
2 模型簡化
該平臺采用內外雙框架結構,偏航框架在外,俯仰框架在內,各軸采用直流力矩電機直接驅動。主要零件包括:內框架、外框架、電機軸、軸承、陀螺支撐結構、CCD支撐結構、力矩電機和電位計等。采用三維建模軟件建立平臺三維幾何模型如圖1所示。
圖1 平臺幾何模型
模型簡化就是為了抓住主要矛盾和主要因素對實際結構進行簡化。對平臺進行有限元分析時,在對結構本身強度、剛度和計算精度影響不大的前提下,為提高計算速度,對結構某些組件進行適當的簡化處理。
2.1 軸承的簡化處理
中國科學院長春光機所王俊等人通過分析計算解決了滾動軸承的靜力學的簡化計算問題,可以使原本較復雜的機構變得簡捷而提高計算效率[2]。在靜力學分析中,可以用三維球體、三維空間桿單元和三維間隙元來模擬實際結構的滾動體,在分析計算時可以根據實際情況對這三種單元進行選用。而沈陽建筑大學郭大慶等人提出每個軸承均由4個均布的彈簧組成的假設[3],如圖2所示。為了限制主軸的軸向移動,在彈簧的另外一端為完全固接,前后軸承簡化為具有徑向剛度的徑向的壓縮彈簧,忽略陶瓷球軸承負荷及轉速對軸承剛度的影響,每個均布的彈簧都用一個彈簧-阻尼單元來模擬。
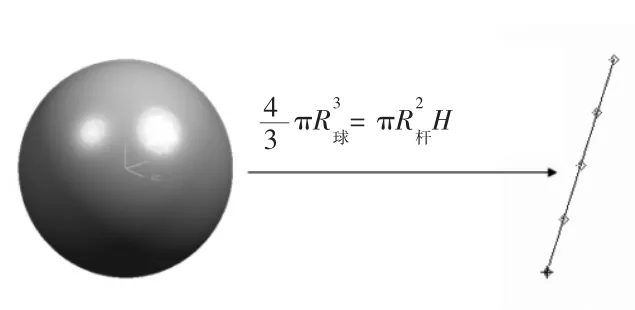
圖2 滾珠簡化為桿單元
該平臺使用的是微型球軸承,滾珠承受的是軸向力。在有限元分析時,關心的是整個平臺的變形和應力情況,對軸承的計算結果要求不是十分嚴格。滾珠用桿單元進行模擬如圖1所示。軸承內、外圈用實體單元劃分,內圈與軸膠結在一起,外圈與框架膠結在一起,保證了軸承軸向定位,如圖3所示。

圖3 軸承有限元模型
2.2 電機和電位計的處理
電機和電位計都不是結構件,所以不關心其剛度和強度,但是其質量對整個平臺結構的強度和振型是有影響的,所以在有限元分析時不能省略這些組件。采用有質量和轉動慣量的0維單元來模擬。電機和電位計的三維模型和有限元模型。
2.3 軸和桿處理
梁單元(Beam)是一種工程中常見的單元類型,且由于截面的形狀不同而有許多不同,所以梁單元定義的重點在于對梁截面性能的描述,既可以通過直接指定截面的參數如截面面積、慣性矩、扭轉剛度等來定義截面,也可以具體指定截面的形狀。
桿單元(Rod)也是實際工程中常用的結構元件,一般來說,桿承受軸向的作用力和扭轉力,相對梁單元而言,桿單元的定義較簡單。
該平臺中軸和桿分別采用梁單元(Beam)和桿單元(Rod)進行模擬,通過直接指定截面形狀和參數來定義屬性。
2.4 連接處理
平臺由近40個零件組成,各零件之間的連接多種多樣,所以建立明確、能夠正確描述各種現象的連接關系是此次有限元建模的關鍵技術之一。根據實際情況和已有的處理經驗,該有限元模型中連接采用了以下幾種處理方式:
(1)過盈配合和接觸連接采用合并不同組件幾何位置相同的某些節點;
(2)剛性連接和軸承內框與軸之間采用多點約束(MPC)中的Rigid(Fixed);
(3)0維質量單元與框架連接采用多點約束中的Explicit;
(4)不接觸連接和某些螺釘連接采用多點約束中的RBE2.
3 網格劃分
采用實體六面體單元和實體四面體單元相結合、2D單元和3D單元合理搭配使用的網格劃分方法。進行網格劃分時,考慮到平臺各部分的尺寸,確定單元長度為2 mm,保持線性單元長寬比小于3,二次單元長寬比小于10.采取分組件分塊的網格劃分方法,對每個零件進行網格劃分,后通過聯接處理,將組件網格組合成整個平臺網格模型。為了得到質量較好的網格,采用手動建立和轉換擴展法劃分網格。整個平臺共劃分43 406個單元和62 047個節點。
完成平臺有限元模型的建立,如圖4所示。

圖4 平臺的有限元模型
4 結束語
(1)依據有限元模型建立原則,對平臺中軸承、電機、電位計、軸、桿以及連接進行了適當的簡化處理,采用力學性能相當的有限單元進行模擬。根據平臺零件的特點,選用了實體六面體單元和實體四面體單元相結合、2D單元和3D單元合理搭配使用的網格劃分方法,對平臺進行了網格劃分。
(2)根據以上提出的幾個關鍵技術建立起了平臺的有限元模型,而對此虛擬樣機進行的靜、動態性能分析,與實驗所得數據逼近,證明模型建立正確、簡化處理得當,為后續平臺靜、動態性能分析及結構優化奠定了良好的基礎,也為多種零件、多種連接的有限元計算模型簡化提供了參考。
參考文獻:
[1]王勖成,紹敏.有限單元法基本原理和數值方法[M].第二版.北京:清華大學出版社,1997.
[2]王俊,盧鍔,王家騏.徑向滾珠軸承在工程分析中簡化方法的研究[J].光學精密工程,1999,7(2):110-114.
[3]郭大慶,吳玉厚.陶瓷軸承電主軸的振動模態分析[J].機電產品開發與創新,2006,19(1):7-8.
[4]王華僑.結構有限元分析中網格劃分技術及其應用實例[J].CAD/CAM與制造業信息化.2005,1:42-47.
Research on Establishing Finite Element Model of a Gyroscope-Stabilized Platform
YANG Xiu-li,JIN Da-wei,LIU Xiao-guang,CHEN Shu-qing
(Aviation University of Air Force,Changchun Jiling 130022,China)
In order to ensure the accuracy of the static and dynamic performance analysis of the Gyroscope-Stabilized Platform in the simulation analysis,a finite element model with high simulation degree and simple calculation must be established.In view of the characteristics of the platform,numerous parts,many types and various connection forms,the key technology of establishing the platform finite element model is researched.Bearings,a motor,a potentiometer,shafts,rods and the connections between parts are reasonably simplified.All parts are divided by selecting suitable mesh.Suitable materials are selected to satisfy the requirements of stiffness and strength.Therefore,the finite element model of platform is established.This research lays a good foundation for the static and dynamic performance analysis and structural optimization of the platform,and provides a reference for the finite element calculation model with various parts and connections.
gyroscope-stabilized platform;finite element;model simplification;mesh division
TU318
A
1672-545X(2017)06-0289-03
2017-03-27
楊秀麗(1979-),女,講師,碩士研究生,研究方向:結構分析及優化、力學教學與改革。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18