基于模型參考的混合懸架多模式切換控制研究
2017-07-31 20:55:28汪若塵馬曉煒丁仁凱孟祥鵬
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2017年7期
汪若塵 馬曉煒 丁仁凱 孟祥鵬 陳 龍
(江蘇大學(xué)汽車工程研究院,鎮(zhèn)江212013)
基于模型參考的混合懸架多模式切換控制研究
汪若塵 馬曉煒 丁仁凱 孟祥鵬 陳 龍
(江蘇大學(xué)汽車工程研究院,鎮(zhèn)江212013)
混合懸架在單一控制模式下的舒適性、安全性和饋能性存在相互制約問題,本文基于模型參考的方式設(shè)計(jì)了一種混合懸架多模式切換控制方法,確定了各模式之間切換規(guī)則來(lái)控制直線電機(jī)和可調(diào)阻尼進(jìn)行切換。然后基于Simulink/Stateflow進(jìn)行了1/4混合懸架的切換控制系統(tǒng)的設(shè)計(jì)和仿真,并進(jìn)行了快速原型試驗(yàn)論證。仿真試驗(yàn)結(jié)果表明:混合懸架多模式切換控制模型可以有效地進(jìn)行切換并達(dá)到切換目標(biāo),提高混合懸架的綜合性能。
混合懸架;能量回收;多模式切換;動(dòng)態(tài)建模
引言
混合懸架由并聯(lián)的直線電機(jī)、彈簧、可調(diào)阻尼器,連接簧上和簧下質(zhì)量組成,從結(jié)構(gòu)來(lái)說(shuō)是混合的。就控制而言,直線電機(jī)既可以作為電動(dòng)機(jī)改善動(dòng)態(tài)性能,又可以作為發(fā)電機(jī)將振動(dòng)能量回收。因此,如何對(duì)混合懸架進(jìn)行控制并進(jìn)行能量回收是眾多學(xué)者和本文研究的重點(diǎn)[1-4]。
針對(duì)模式切換的動(dòng)態(tài)建模過程,當(dāng)前主要研究對(duì)象依舊為混合動(dòng)力汽車、航空發(fā)動(dòng)機(jī)和汽車發(fā)動(dòng)機(jī)。國(guó)內(nèi)尹安東等[5]、王慶年等[6]、秦大同等[7]都對(duì)混合動(dòng)力汽車不同工作模式切換的動(dòng)態(tài)特性及其穩(wěn)定性進(jìn)行了深入研究,將混雜理論融入模式切換研究。但目前對(duì)于混合懸架模式切換的動(dòng)態(tài)分析還鮮有研究。
除各個(gè)工作模式的有效切換外,單一模式下直線電機(jī)主動(dòng)控制或者能量回收也是研究重點(diǎn)。DAVID等[8]提出了一種基于電磁懸架的車輛動(dòng)力學(xué)性能和節(jié)能特性的雙目標(biāo)控制結(jié)構(gòu),以期實(shí)現(xiàn)車輛動(dòng)力學(xué)性能和節(jié)能特性的平衡。陳宏偉[9]提出了一種節(jié)能型主動(dòng)懸架系統(tǒng),采用無(wú)刷永磁直線電機(jī)作動(dòng)器,研究了直線電機(jī)式主動(dòng)懸架的動(dòng)態(tài)性能以及饋能性能。PIRES等[10]研究了懸架振動(dòng)能量回饋與動(dòng)力學(xué)控制的矛盾關(guān)系,但只研究單一模式下的懸架性能和能量回收,并未考慮利用模式切換來(lái)提高饋能效率。
為準(zhǔn)確描述混合懸架模式切換系統(tǒng)中存在的動(dòng)態(tài)特性,本文利用混雜自動(dòng)機(jī)模型描述連續(xù)動(dòng)態(tài)過程和離散事件以及兩者之間相互耦合關(guān)系。并使用以有限狀態(tài)機(jī)(FSM)為理論基礎(chǔ)的 Simulink/ Stateflow模塊建立切換控制系統(tǒng)。采用基于模型參考自適應(yīng)控制方法,把自適應(yīng)控制部分改進(jìn)為自適應(yīng)模式切換,對(duì)混合懸架進(jìn)行多模式切換控制。本控制方法利用被動(dòng)參考懸架模型提供實(shí)時(shí)汽車參考性能指標(biāo),并與切換條件比較,控制混合懸架在安全性模式、舒適性模式、綜合性能模式、被動(dòng)饋能模式4種工作模式中切換,在不同模式下調(diào)節(jié)控制方法,呈現(xiàn)混合懸架的不同特性。最后通過仿真和試驗(yàn)探究該混合懸架被動(dòng)饋能模式和主動(dòng)控制模式切換的有效性和汽車動(dòng)態(tài)性能改良,以及在被動(dòng)饋能模式下的能量回收狀況。
1 混合懸架動(dòng)態(tài)模型
混合懸架動(dòng)態(tài)模型是實(shí)現(xiàn)控制懸架工作模式切換和能量回收的基礎(chǔ)和關(guān)鍵。為了準(zhǔn)確描述混合懸架動(dòng)態(tài)模型,結(jié)合混雜自動(dòng)機(jī)模型,對(duì)其進(jìn)行描述以及建模。
1.1 混合懸架多模式切換過程分析
混合懸架多模式切換系統(tǒng)的主要控制目標(biāo)是能夠準(zhǔn)確、快速地在各個(gè)模式之間進(jìn)行切換,以滿足整車的綜合性能和能量回收要求。圖1為1/4混合懸架結(jié)構(gòu)示意圖,可以看出,系統(tǒng)主要由直線電機(jī)、可調(diào)阻尼器、彈簧、路面?zhèn)鞲衅骱虴CU組成。
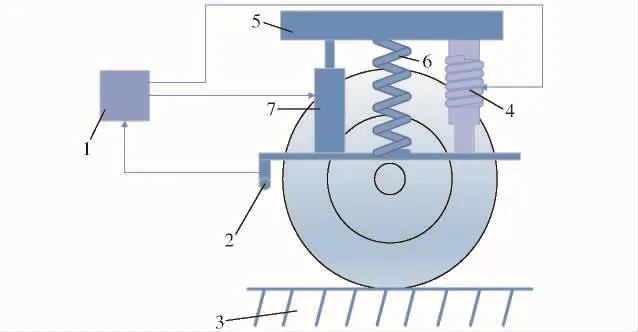
圖1 混合懸架結(jié)構(gòu)Fig.1 Hybrid suspension structure
根據(jù)模式切換系統(tǒng)組成結(jié)構(gòu),混合懸架多模式切換過程可概括描述為:將ECU計(jì)算出的參考車身加速度、參考輪胎動(dòng)位移分別與相應(yīng)的參考閾值比較,根據(jù)切換策略(表1)進(jìn)入合適的工作模式。表1中,(Zu-Zr)和分別為ECU根據(jù)路面輸入計(jì)算出的輪胎動(dòng)位移和車身垂直加速度;(Zu-Zr)1和為所設(shè)定的閾值。ECU發(fā)出控制信號(hào),直線電機(jī)調(diào)節(jié)為電動(dòng)機(jī)模式或發(fā)電機(jī)模式,可調(diào)阻尼器調(diào)至相應(yīng)阻尼。
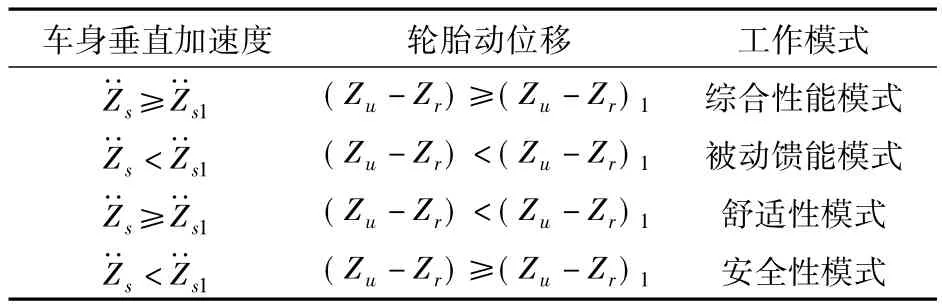
表1 切換策略Tab.1 Sw itching strategy
車身垂直加速度直觀體現(xiàn)了乘坐舒適性,輪胎動(dòng)位移直觀體現(xiàn)了汽車抓地能力,即安全性能。因此制定控制策略時(shí)將這2個(gè)參數(shù)作為模式切換的閾值。車身垂直加速度和輪胎動(dòng)位移受車速和路面兩個(gè)因素影響,在定車輛定速仿真與試驗(yàn)時(shí),只受路面不平度等級(jí)的影響。
仿真后得知懸架在A級(jí)路面行駛時(shí),車身垂直加速度和輪胎動(dòng)位移均較小,在D級(jí)路面行駛時(shí)兩者均較大,B、C級(jí)路面行駛時(shí)會(huì)交替產(chǎn)生車身加速度和輪胎動(dòng)位移較大的問題。因此設(shè)定合適的閾值使得仿真時(shí)懸架在A級(jí)路面行駛時(shí)進(jìn)入被動(dòng)饋能模式進(jìn)行能量回收;在B級(jí)、C級(jí)路面行駛時(shí)進(jìn)入舒適性模式或者安全性模式,利用天棚或者地棚控制改善其車身垂直加速度或者輪胎動(dòng)位移;在D級(jí)路面行駛時(shí)進(jìn)入綜合性能模式,采用天棚地棚混合控制改善其動(dòng)態(tài)性能。
1.2 多模式切換系統(tǒng)描述
由混合懸架多模式切換過程可以看出,整個(gè)運(yùn)行過程可以劃分為4個(gè)離散的工作模式,即舒適性模式、安全性模式、被動(dòng)饋能模式、綜合性能模式。各個(gè)模式下,連續(xù)變量(如車身加速度和輪胎動(dòng)位移)為典型的連續(xù)動(dòng)態(tài)過程,為了達(dá)到控制目標(biāo),系統(tǒng)又必須在各個(gè)工作模式之間切換且驅(qū)動(dòng)工作模式切換的為典型離散事件(如可調(diào)阻尼器狀態(tài)和直線電機(jī)工作模式)。因此,整個(gè)過程中既包含連續(xù)動(dòng)態(tài)過程,又存在離散事件,可以歸納為混雜系統(tǒng)。
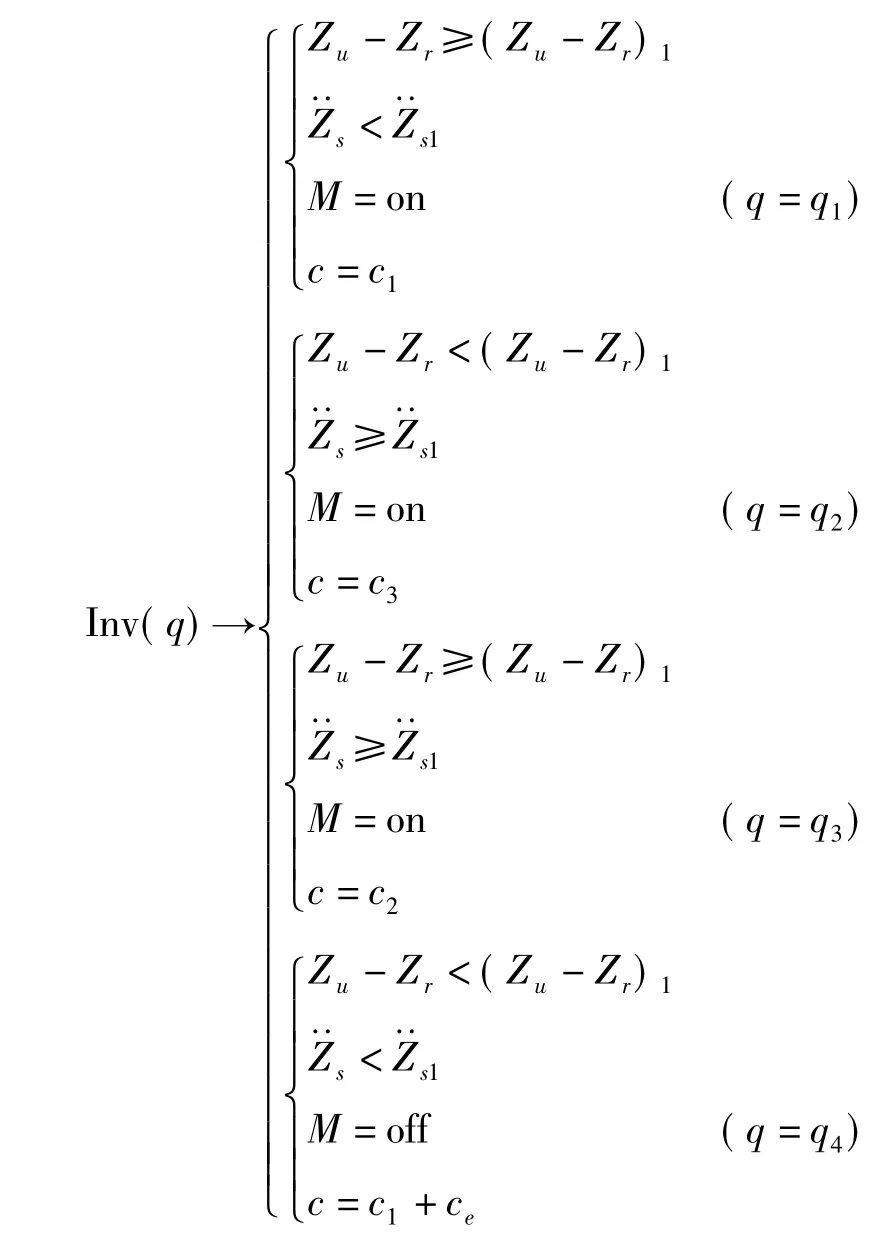
混雜自動(dòng)機(jī)模型(Hybrid automation model)是描述混雜系統(tǒng)的常用工具,本文利用它對(duì)混合懸架進(jìn)行如下描述:混合懸架多模式切換系統(tǒng)包括4個(gè)狀態(tài):q1、q2、q3、q4。
(2)連續(xù)輸入變量:{Zr,F(xiàn)M},其中Zr為路面位移,F(xiàn)M為電機(jī)主動(dòng)輸出力。離散輸入變量{c,M},其中c為可調(diào)阻尼器應(yīng)該選取的模式,M為直線電機(jī)應(yīng)該工作的類型。
(4)不變集合
(5)離散狀態(tài)模式之間的離散事件集合:對(duì)于懸架系統(tǒng)的4個(gè)工作模式有12個(gè)可能切換的離散事件,其切換關(guān)系如圖2所示。
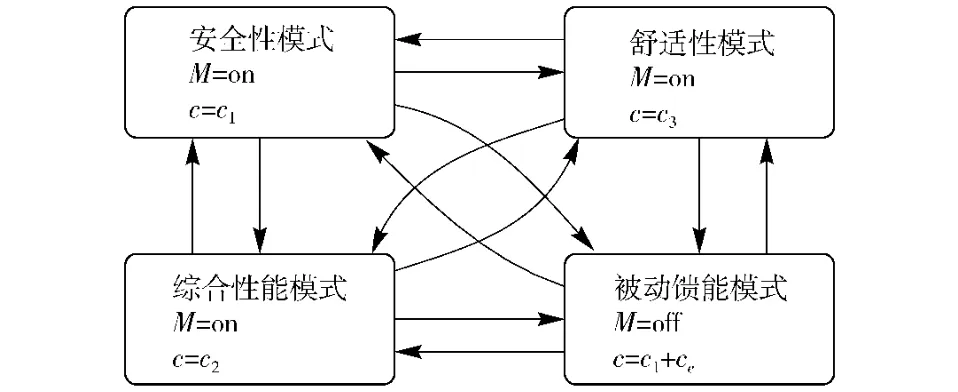
圖2 離散事件及其切換關(guān)系Fig.2 Discrete events and switching relation
(6)容許輸入域,定義輸入作用域來(lái)確定輸入值范圍。在該系統(tǒng)中路面輸入Zr和直線電機(jī)主動(dòng)輸出力FM都有一定的容許取值范圍。混合懸架模式切換的主要工作路面為A~D級(jí)路面,因此路面輸入Zr的取值范圍為-0.3~0.3m,直線電機(jī)輸出力的范圍為-500~500 N。
1.3 混合懸架動(dòng)態(tài)數(shù)學(xué)模型
為實(shí)現(xiàn)有效切換模式,在對(duì)模式切換過程中的混雜動(dòng)力學(xué)行為分析的基礎(chǔ)上,應(yīng)結(jié)合其物理模型建立其動(dòng)態(tài)數(shù)學(xué)模型,便于進(jìn)行整個(gè)系統(tǒng)的控制策略設(shè)計(jì)。混合懸架系統(tǒng)結(jié)構(gòu)示意圖如圖3所示。
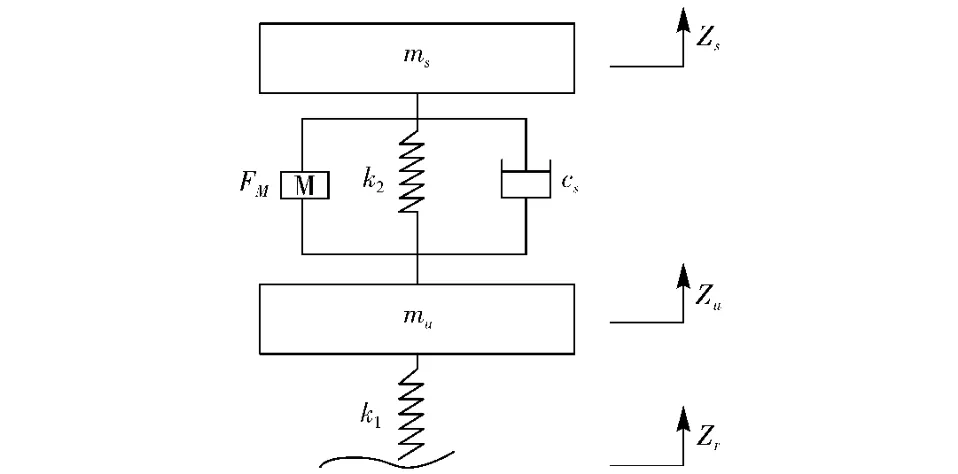
圖3 混合懸架模型Fig.3 Hybrid suspension model
為準(zhǔn)確反映模式切換中可調(diào)阻尼器和直線電機(jī)的數(shù)學(xué)關(guān)系,建立混合懸架動(dòng)態(tài)動(dòng)力學(xué)方程
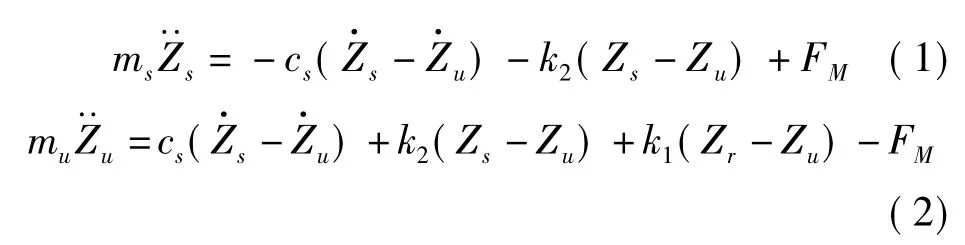
其中
式中 FM——直線電機(jī)、可調(diào)阻尼器和彈簧所結(jié)合產(chǎn)生的懸架控制力
cs——懸架阻尼
k1、k2——輪胎和懸架剛度
Zs、Zu——簧上質(zhì)量和簧下質(zhì)量位移
ms、mu——簧上質(zhì)量和簧下質(zhì)量
2 模式切換控制策略
2.1 基于模型參考的模式切換
懸架系統(tǒng)模式切換的控制策略常將某幾個(gè)實(shí)際輸出信號(hào)例如車速、車身加速度均方根、持續(xù)時(shí)間等(本文為車身加速度和輪胎動(dòng)位移)與切換閾值相比較,且將比較信號(hào)轉(zhuǎn)換為邏輯變量信號(hào)輸入到切換系統(tǒng),切換系統(tǒng)判斷并輸出帶有控制策略的邏輯信號(hào)[9-10]。但在模式切換時(shí),具體采用多長(zhǎng)時(shí)間內(nèi)的輸入信號(hào)均方根往往需要靠經(jīng)驗(yàn)公式或大量的實(shí)驗(yàn)來(lái)確定,對(duì)模式切換的設(shè)計(jì)過程帶來(lái)較大的難度。
而且如果以實(shí)際混合懸架模型的動(dòng)力學(xué)性能進(jìn)行實(shí)時(shí)判斷,前一刻懸架切換至舒適性模式改善了舒適性性能指標(biāo),下一刻卻因?yàn)槭孢m性性能指標(biāo)達(dá)標(biāo)而切換到其他工作模式,此問題會(huì)導(dǎo)致系統(tǒng)切換的紊亂。
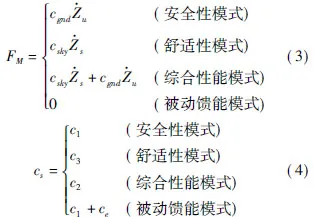
為解決該問題,本文采用一種類似于“基于模型參考的自適應(yīng)控制”的控制方法,且命名為“基于模型參考的多模式切換控制”。該控制方法以混合懸架為對(duì)象,在控制器中建立一個(gè)與混合懸架所有懸架參數(shù)完全一樣的被動(dòng)懸架理論模型,作為動(dòng)力學(xué)性能參考目標(biāo),并將其在不同車速不同路面的動(dòng)力學(xué)性能與參考閾值相比較,利用比較結(jié)果操控真正的混合懸架進(jìn)行模式切換,使實(shí)際混合懸架滿足切換控制要求。兩者對(duì)比如圖4所示,圖4b為本文所采用的控制方法。
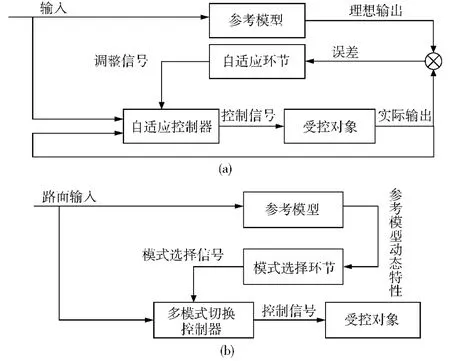
圖4 基于模型參考的2種控制方式對(duì)比Fig.4 Comparison of two controlmodes based on model reference
2.2 穩(wěn)定性控制策略設(shè)計(jì)
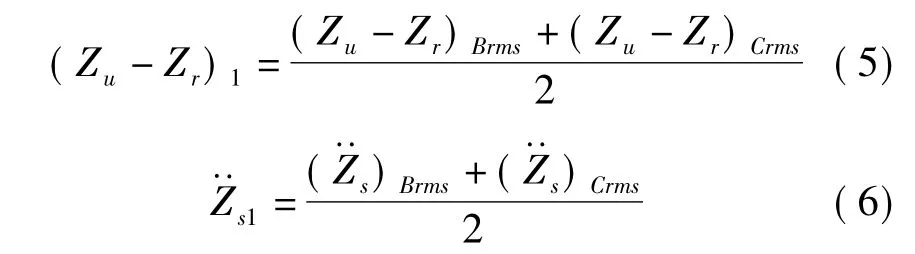
將仿真得到的被動(dòng)懸架模型在B級(jí)路面和C級(jí)路面行駛的車身垂直加速度均方根和輪胎動(dòng)位移均方根取兩者平均數(shù)作為切換策略的閾值,仿真試驗(yàn)證實(shí)此閾值正好使得本懸架在A級(jí)路面進(jìn)入被動(dòng)饋能模式,B、C級(jí)路面時(shí)進(jìn)入舒適性模式或者安全性模式,D級(jí)路面進(jìn)入綜合性能模式,4種模式和4種路面一一對(duì)應(yīng)起來(lái)。具體公式為
利用Simulink進(jìn)行仿真測(cè)試,可有效進(jìn)行模式切換且切換時(shí)機(jī)較為合適。根據(jù)ECU計(jì)算的實(shí)時(shí)車身加速度、輪胎動(dòng)位移與相應(yīng)閾值進(jìn)行比較來(lái)控制切換。如果只利用這2個(gè)條件進(jìn)行切換,系統(tǒng)可能在2個(gè)模式之間來(lái)回跳躍,則系統(tǒng)會(huì)陷入紊亂。為解決此問題,增加了一個(gè)系統(tǒng)穩(wěn)定模塊,如圖5所示。
其原理是在切換控制器和懸架控制裝置中加了一個(gè)用邏輯關(guān)系組成的穩(wěn)定模塊,其邏輯過程如圖6所示。Zn表示第n個(gè)輸入值,k表示穩(wěn)定判斷次數(shù)。
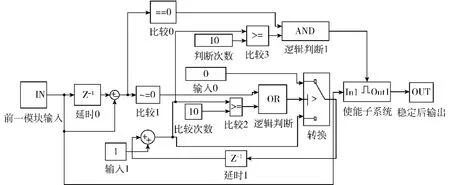
圖5 系統(tǒng)穩(wěn)定模塊Fig.5 System stabilitymodule
具體控制流程如下:
(1)將等效于混合懸架被動(dòng)模式的被動(dòng)懸架作為參考對(duì)象,收集ECU計(jì)算的實(shí)時(shí)車身加速度和輪胎動(dòng)位移。
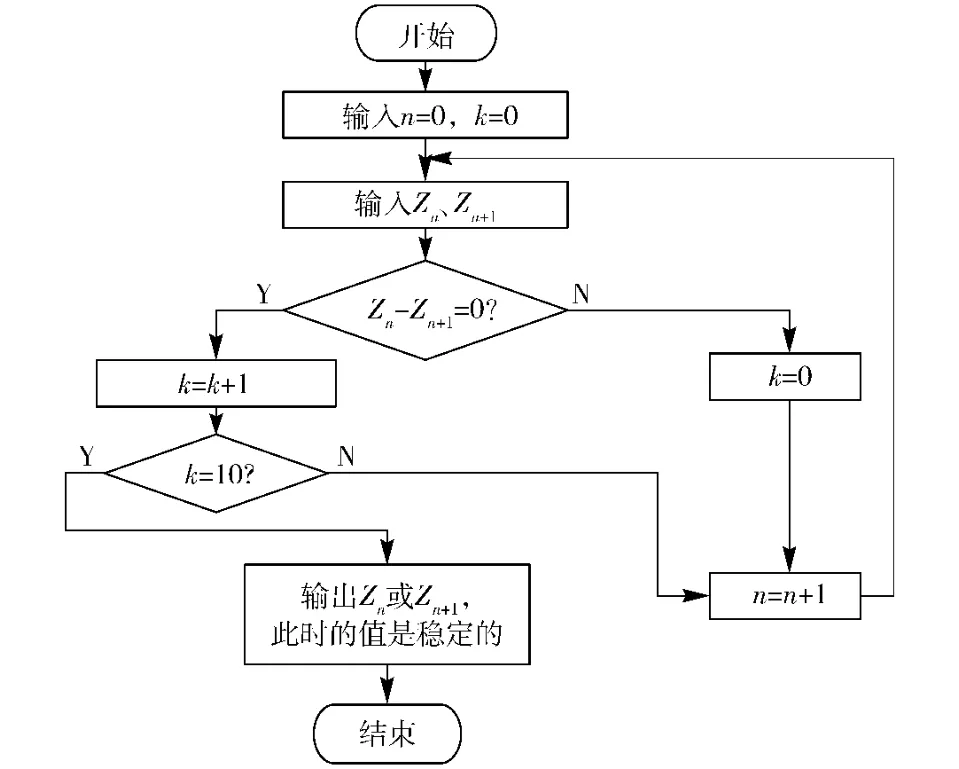
圖6 穩(wěn)定控制原理流程圖Fig.6 Flow chart of stability control principle
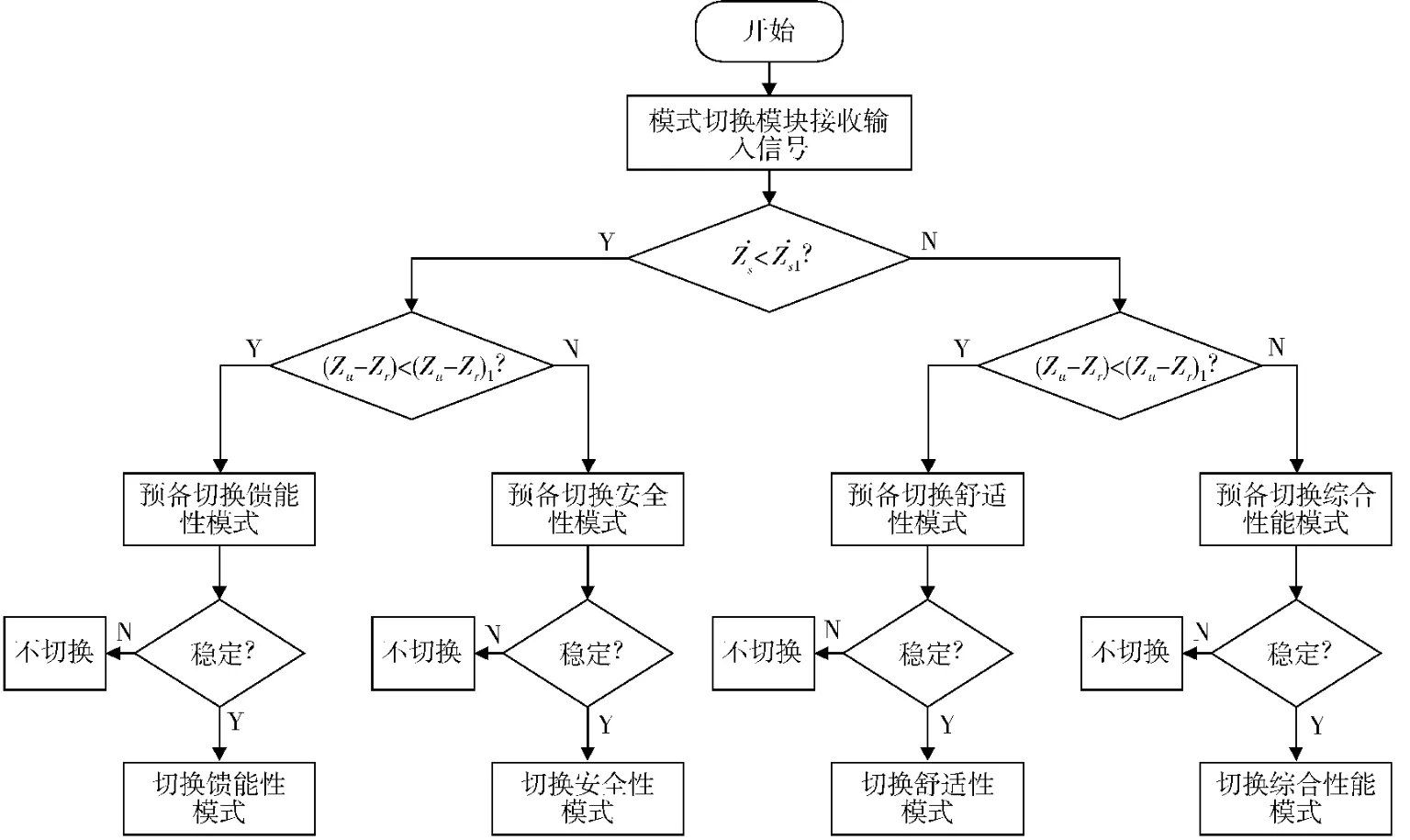
圖7 模式切換控制流程Fig.7 Mode switching control flow
(2)將收集的實(shí)時(shí)車身加速度和輪胎動(dòng)位移直接與切換閾值相比較,確定實(shí)時(shí)的最佳工作模式。該步驟后切換系統(tǒng)將工作模式的輸出信號(hào)轉(zhuǎn)換為邏輯變量,并將邏輯變量輸入系統(tǒng)穩(wěn)定判斷模塊,如圖7所示。
(3)利用系統(tǒng)穩(wěn)定性判斷模塊檢測(cè)輸入的邏輯變量是否具有一定的穩(wěn)定性,如能夠保持10次輸入均不變,則可以將該邏輯變量輸出到混合懸架的阻尼和直線電機(jī)選擇模塊,控制混合懸架進(jìn)行一次模式切換,否則從新計(jì)數(shù)。
此種模式切換略去了時(shí)間這一個(gè)不易確定閾值的輸入對(duì)象,使得建立的模型適應(yīng)性更強(qiáng),切換更加準(zhǔn)確。
3 模式切換仿真分析
3.1 Simulink/Stateflow切換控制系統(tǒng)建模
通過對(duì)混合懸架實(shí)際運(yùn)行工況進(jìn)行分析,確定了混合懸架的工作模式和切換規(guī)則,在此基礎(chǔ)上,為模擬混合懸架在模式切換過程中的汽車動(dòng)力學(xué)性能,將切換模型和懸架模型結(jié)合起來(lái),綜合上文敘述的其他模塊,建立了基于多模式切換的混合懸架控制模型,包括路面與車速輸入模塊、混合懸架模塊、被動(dòng)懸架模塊、阻尼和直線電機(jī)模式選擇模塊、參考閾值模塊、懸架模式切換模塊、系統(tǒng)穩(wěn)定時(shí)間判斷模塊一共7個(gè)模塊。驗(yàn)證混合懸架系統(tǒng)是否滿足切換控制要求。
首先驗(yàn)證懸架模式切換模塊的準(zhǔn)確性和有效性。將圖8、9所示的車身加速度和輪胎動(dòng)位移和相應(yīng)閾值指標(biāo)輸入。
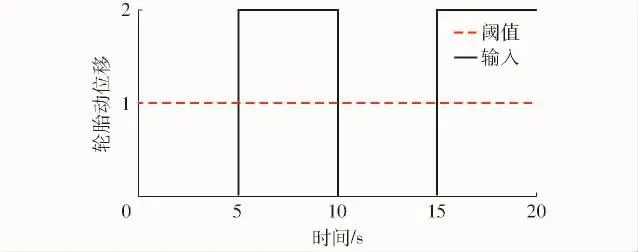
圖8 輪胎動(dòng)位移閾值和輸入Fig.8 Threshold and input of tire dynamic displacement
系統(tǒng)經(jīng)歷仿真得到的輸出信號(hào)如圖10所示,不同的直線電機(jī)工作信號(hào)輸出與阻尼模式判斷信號(hào)輸出可以完整組成4種不同模式的工作需要。
仿真對(duì)多個(gè)模式下的切換進(jìn)行了試驗(yàn),由于篇幅原因,本文列舉的是主動(dòng)到被動(dòng)的變化,其他模式的變化均為主動(dòng)控制和主動(dòng)控制之間的變化,其他主動(dòng)控制論文也描述的較多,因此本文由于篇幅原因只描述了一種主動(dòng)到被動(dòng)的切換情況。
表2為某1/4懸架模型主要參數(shù),表3為仿真工況參數(shù)。
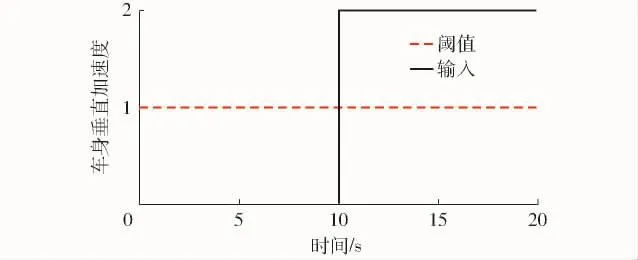
圖9 車身垂直加速度閾值和輸入Fig.9 Threshold and input of body acceleration
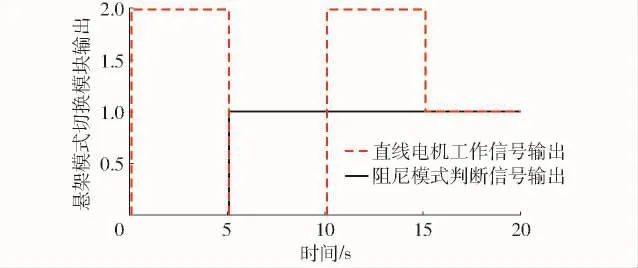
圖10 模式信號(hào)輸出Fig.10 Mode signal output
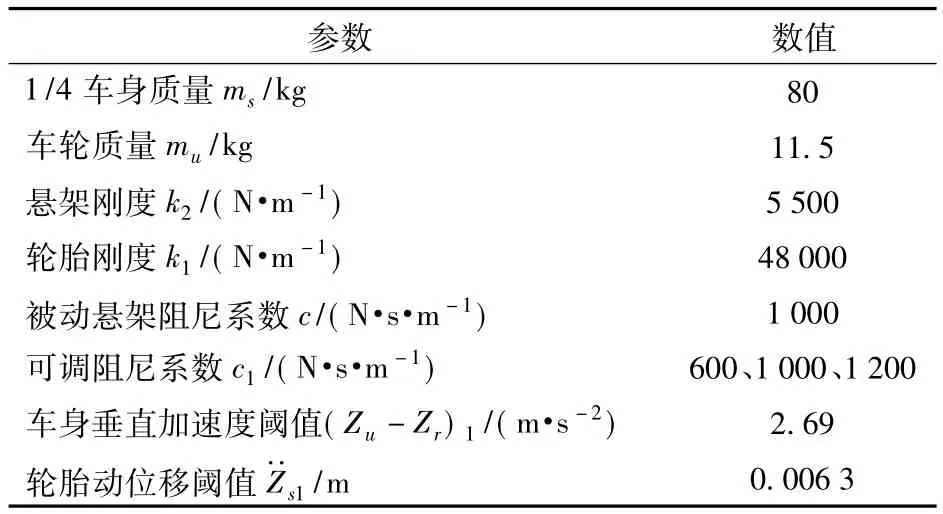
表2 懸架模型主要參數(shù)Tab.2 Main parameters of suspension model
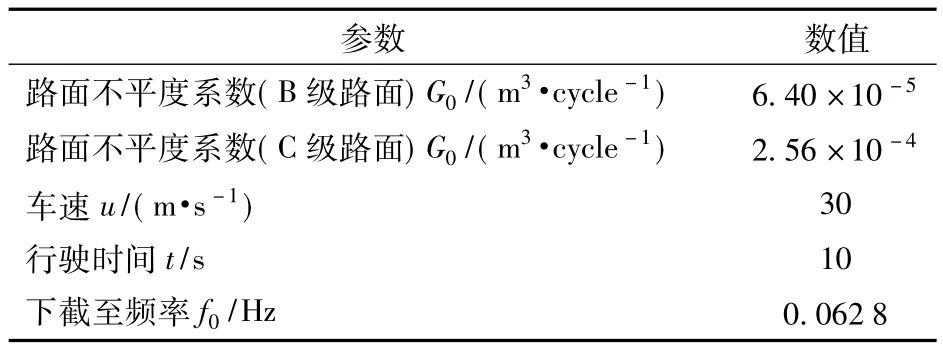
表3 仿真工況參數(shù)Tab.3 Param eters of simulation condition
3.2 仿真結(jié)果分析
為測(cè)試切換系統(tǒng)模式切換的有效性和單個(gè)模式下控制策略的有效性。暫列出模擬仿真車輛在第10秒時(shí)從C級(jí)路面行駛至B級(jí)路面時(shí)的20 s仿真的結(jié)果,驗(yàn)證懸架切換模型的有效性和懸架動(dòng)力學(xué)性能的變化,仿真結(jié)果如圖11、12和表4所示。
由圖11、12和表4可得:
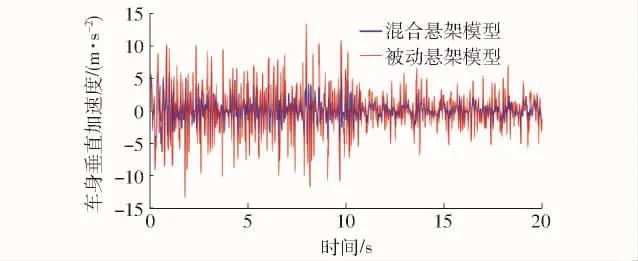
圖11 車身垂直加速度時(shí)域響應(yīng)Fig.11 Time domain response of body acceleration
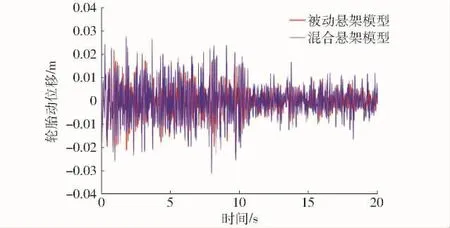
圖12 輪胎動(dòng)位移時(shí)域響應(yīng)Fig.12 Time domain response of tire dynamic displacement
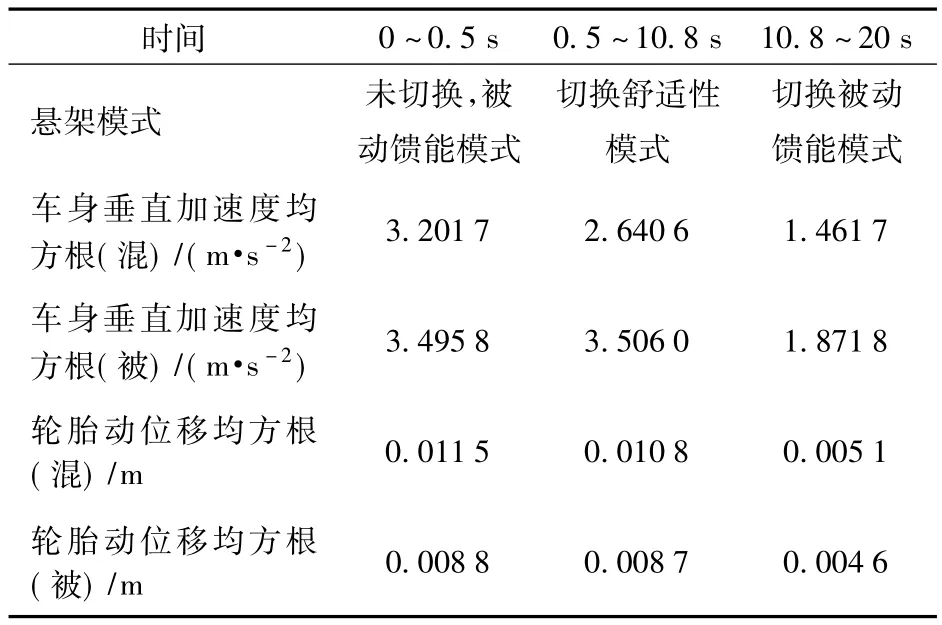
表4 各時(shí)間段仿真結(jié)果Tab.4 Simulation results for each time period
(1)此混合懸架模型可以實(shí)現(xiàn)主動(dòng)模式到被動(dòng)模式的相互切換,且能按照控制要求改善其舒適性,饋能性等性能。
(2)模式切換模型變化特點(diǎn):①路面變化的時(shí)刻,模式切換的時(shí)刻,車身動(dòng)力學(xué)性能受控制得以改善的時(shí)刻并非同一時(shí)刻,具體時(shí)間差受路面、車速、切換控制策略影響。例如路面在第10秒變化,模式切換開始于第10.8秒,而懸架動(dòng)態(tài)性能改善約在第11秒后。②驗(yàn)證了該懸架可以在合理的情況下切換到被動(dòng)饋能模式下,將直線電機(jī)瞬時(shí)功率在饋能模式時(shí)間段上積分可得通過在B級(jí)路面30 m/s的車速下20 s可以回收24.41 J的能量。約回收計(jì)算得出的前20 s主動(dòng)控制所消耗能量的1/2。理想情況下如果B級(jí)路面路程是C級(jí)路面路程的兩倍,則該混合懸架在能耗的數(shù)值上基本可以實(shí)現(xiàn)自供能。③在切換舒適性模式過程中,車身加速度均方根改善了17.53%,輪胎動(dòng)位移均方根基本不變,滿足控制要求。
4 多模式切換系統(tǒng)的快速原型試驗(yàn)
為驗(yàn)證基于模型參考的多模式切換控制方法的有效性和可行性,除了離線仿真,本文進(jìn)一步考慮實(shí)際控制時(shí),信號(hào)的轉(zhuǎn)換,硬件的連接也會(huì)對(duì)實(shí)際控制效果產(chǎn)生影響,所以需要建立控制器快速原型和實(shí)際混合懸架的半實(shí)物仿真試驗(yàn)系統(tǒng),對(duì)整個(gè)控制進(jìn)行更接近于實(shí)際對(duì)象的功能驗(yàn)證。本文采用的是由德國(guó)dSPACE公司開發(fā)的基于dSPACE軟硬件系統(tǒng)的快速原型設(shè)計(jì)方法與仿真的解決方案。主要器材及其試驗(yàn)結(jié)構(gòu)布置示意圖如圖13、14所示。圖13中包括單通道液壓伺服系統(tǒng)、1/4混合懸架系統(tǒng)、加速度傳感器、位移傳感器、dSPACE單元、Rapidpro單元、LMS信號(hào)采集系統(tǒng)、連接線材和步進(jìn)電機(jī)(對(duì)可調(diào)阻尼進(jìn)行驅(qū)動(dòng))等。

圖13 主要試驗(yàn)器材Fig.13 Main test equipments
利用單通道液壓伺服系統(tǒng)加載C級(jí)到B級(jí)路面的路面信號(hào),具體是將Simulink模型中所產(chǎn)生的路面譜數(shù)據(jù)轉(zhuǎn)換為.csv格式的文件導(dǎo)入到試驗(yàn)臺(tái)的終端微機(jī),即可以讓激振頭按給定路面工況進(jìn)行輸入。進(jìn)行試驗(yàn),在檢測(cè)軟件上輸出車身垂直加速度和輪胎動(dòng)位移。試驗(yàn)數(shù)據(jù)與仿真結(jié)果對(duì)比如圖15和圖16所示。
由圖15、16可以看出試驗(yàn)與仿真得出的車身垂直加速度和輪胎動(dòng)位移結(jié)果較為一致。穩(wěn)定在被動(dòng)模式下試驗(yàn)得出的車身垂直加速度均方根值和輪胎動(dòng)位移均方根為1.900 m/s2、0.006 m,相較于仿真值1.771 m/s2、0.006 3 m,相對(duì)誤差為 7.3%和4.8%,考慮到信號(hào)轉(zhuǎn)換和硬件連接對(duì)試驗(yàn)效果的影響,結(jié)果基本吻合。同時(shí)在10 s附近試驗(yàn)懸架也進(jìn)行了有效的模式切換,驗(yàn)證了模型的正確性和控制策略的有效性。
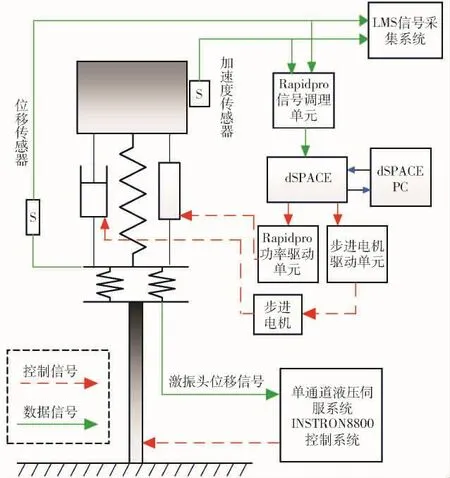
圖14 試驗(yàn)結(jié)構(gòu)布置示意圖Fig.14 Schematic diagram of test structure layout
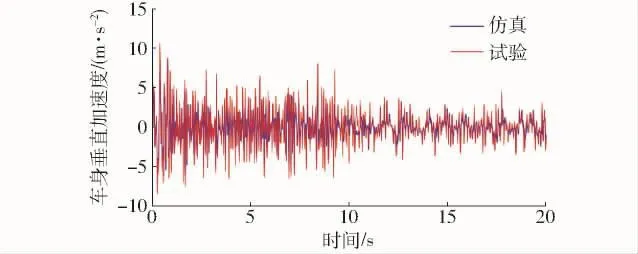
圖15 車身垂直加速度試驗(yàn)結(jié)果與仿真結(jié)果對(duì)比Fig.15 Comparison of test and simulation results for body acceleration
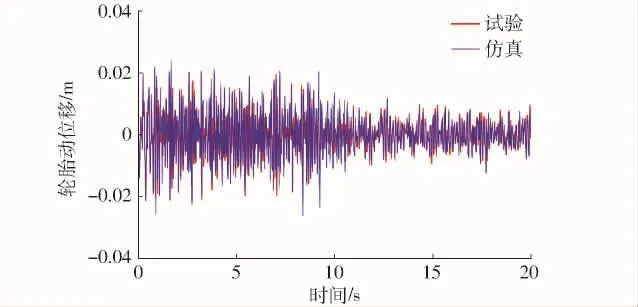
圖16 輪胎動(dòng)位移試驗(yàn)結(jié)果與仿真結(jié)果對(duì)比圖Fig.16 Comparison of test and simulation results for tire dynamic displacement
5 結(jié)論
(1)研究了混合懸架的多模式切換控制過程,建立了基于模型參考的多模式切換控制系統(tǒng),使混合懸架可以在多種模式下自動(dòng)切換。
(2)提出并設(shè)定了控制系統(tǒng)的主要切換參數(shù),使得混合懸架針對(duì)不同路面能夠切換到合適的工作模式,仿真試驗(yàn)表明模式切換使混合懸架在C級(jí)路面的動(dòng)態(tài)性能改善,在B級(jí)路面上有效地進(jìn)行能量回收。
(3)進(jìn)行了快速原型臺(tái)架試驗(yàn),對(duì)懸架進(jìn)行試驗(yàn)研究,車身垂直加速度均方根和輪胎動(dòng)位移均方根較仿真結(jié)果相對(duì)誤差為7.3%和4.8%,與仿真結(jié)果基本吻合,驗(yàn)證了仿真結(jié)果的正確性。
1 喻凡,曹民,鄭雪春.能量回饋式車輛主動(dòng)懸架的可行性研究[J].振動(dòng)與沖擊,2005,24(4):27-30.YU Fan,CAOMin,ZHENG Xuechun.Research on the feasibility of the vehicle active suspension with energy regeneration[J].Journal of Vibration and Shock,2005,24(4):27-30.(in Chinese)
2 陳士安,何仁,陸森林.新型饋能型懸架及其工作原理[J].機(jī)械工程學(xué)報(bào),2007,43(11):177-182.CHEN Shian,HE Ren,LU Senlin.New reclaiming energy suspension and itsworking principle[J].Chinese Journal ofMechanical Engineering,2007,43(11):177-182.(in Chinese)
3 張勇超,鄭雪春,喻凡.饋能式電動(dòng)懸架的原理與試驗(yàn)研究[J].汽車工程,2008(1):48-52.ZHANG Yongchao.ZHENG Xuechun,YU Fan.Theoretical and experimental study on electrical energy-regenerative suspension[J].Automotive Engineering,2008(1):48-52.(in Chinese)
4 WENDELG R,STECKLEIN G L.A regenerative active suspension system[C].SAE Paper 910659,1991.
5 尹安東,趙韓.基于混合系統(tǒng)理論的混合動(dòng)力城市客車控制策略研究[J].汽車工程,2010,32(2):98-102.YIN Andong,ZHAO Han.A study on the energy control strategy for hybrid electric bus based on hybrid system theory[J].Automotive Engineering,2010,32(2):98-102.(in Chinese)
6 王慶年,冀爾聰,王偉華.并聯(lián)混合動(dòng)力汽車模式切換過程的協(xié)調(diào)控制[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2008,38(1):2-6.WANG Qingnian,JIErcong,WANGWeihua.Coordinated control formode-switch of parallel hybrid electric vehicle[J].Journal of Jilin University:Engineering and Technology Edition,2008,38(1):2-6.(in Chinese)
7 秦大同,楊官龍,劉永剛.插電式混合動(dòng)力汽車能耗優(yōu)化控制策略的研究[J].汽車工程,2015,37(12):1366-1377.QIN Datong,YANG Guanlong,LIU Yonggang.A research on energy consumption optimization control strategy for plug-in hybrid electric vehicle[J].Automotive Engineering,2015,37(12):1366-1377.(in Chinese)
8 DAVID SB,BOBROVSKY B Z.Actively controlled vehicle suspension with energy regeneration capabilities[J].Vehicle System and Dynamics,2011,49(6):833-854.
9 陳宏偉.車輛節(jié)能型主動(dòng)懸架的研究[D].西安:西安理工大學(xué),2008.
10 PIRES L,SMITH M C,HOUGHTON N E,et al.Design trade-offs for energy regeneration and control in vehicle suspensions[J].International Journal of Control,2013,86(11):2022-2034.
11 汪少華,陳龍,孫曉強(qiáng).電控空氣懸架系統(tǒng)阻尼多模式自適應(yīng)切換控制研究[J/OL].農(nóng)業(yè)機(jī)械學(xué)報(bào),2013,44(12):22-28.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.a(chǎn)spx?file_no=20131205&flag=1.DOI:10.6041/j.issn.1000-1298.2013.12.005.WANG Shaohua,CHEN Long,SUN Xiaoqiang.Damping multi-mode adaptive switching control of ECAS system[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(12):22-28.(in Chinese)
12 汪少華,陳龍,孫曉強(qiáng).半主動(dòng)空氣懸架多模式切換控制模型的分析[J].江蘇大學(xué)學(xué)報(bào):自然科學(xué)版,2013,34(6):638-642.WANG Shaohua,CHEN Long,SUN Xiaoqiang.Amulti-mode switching controlmode for semi-active air suspension[J].Journal of Jiangsu University:Natural Science Edition,2013,34(6):638-642.(in Chinese)
13 余志生.汽車?yán)碚摚跰].3版.北京:機(jī)械工業(yè)出版社,2001.
14 張威.STATEFLOW邏輯系統(tǒng)建模[M].西安:西安電子科技大學(xué)出版社,2007.
15 喻凡,林逸.汽車系統(tǒng)動(dòng)力學(xué)[M].北京:機(jī)械工業(yè)出版社,2005.
16 陳星,羅虹,鄧兆祥.直線電機(jī)饋能懸架控制系統(tǒng)設(shè)計(jì)與饋能分析[J].振動(dòng)與沖擊,2012,31(8):124-129.CHEN Xing,LUO Hong,DENG Zhaoxiang.Design of an energy-regenerative suspension control system using linear motor and energy recovery analysis[J].Journal of Vibration and Shock,2012,31(8):124-129.(in Chinese)
17 SHID H,CHEN L,WANG R C,et al.Design and experimental study of semi-active energy-regenerative suspension[J].Smart Materials and Structures,2015,24(1):015001.
18 巴特,高印寒,王慶年.混合動(dòng)力汽車工作模式切換控制方案[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2016,46(1):22-27.BA Te,GAO Yinhan,WANG Qingnian.Mode-switch control scheme for hybrid electric vehicle[J].Journal of Jilin University: Engineering and Technology Edition,2016,46(1):22-27.(in Chinese)
19 秦大同,陳淑江,胡明輝,等.基于駕駛員意圖識(shí)別的純電動(dòng)汽車動(dòng)力性驅(qū)動(dòng)控制策略[J].汽車工程,2015,37(1):27-37.QIN Datong,CHEN Shujiang,HU Minghui,et al.Drive control strategy for the power performance of pure electric vehicles based on driver intention recognition[J].Automotive Enginering,2015,37(1):27-37.(in Chinese)
20 MANSOUR A,EHSAN A,AVESTA G,etal.Multi-objective optimization of a hybrid electromagnetic suspension system for ride com fort,road holding and regenerated power[J].Journal of Vibration and Control,2015,83(9):969-970.
Multi-mode Sw itching Control System for Hybrid Suspension Based on Model Reference
WANG Ruochen MA Xiaowei DING Renkai MENG Xiangpeng CHEN Long
(Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013,China)
Due to the mutual restricted problem among comfort,safety,energy-regeneration in single controlmode,the hybrid suspension with four working modes was designed and the switching strategy based onmodel referencewas generated to control linearmotor and adjustable damping to switch.Comfort model,safemodel,combine model and passive energy recycle model were proposed to solve the above problems.And the body acceleration and tire dynamic displacement were used as the threshold of these four switchingmodes.In this system,the hybrid suspension with linearmotor and three stages adjustable damping was taken as the research object.First of all,control strategies in differentmodeswere changed through the use of multi-mode switching to improve the control effect.Then in order to reduce energy consumption and recover energy,the appropriate damping values in differentmodeswere selected and the linearmotor was used as a generator.And based on Simulink/Stateflow,the switching control system of 1/4 hybrid suspension was designed and simulated,and a complete simulation process from road switching,mode selection,mode switching to the changing of suspension model parameters was constructed.And a rapid prototype experiment was carried out.The experimental study on dynamic performance and energy feedback capability of hybrid suspension was based on dSPACE development model.The corresponding control strategy was designed and the results indicated that the root mean square value of the body acceleration and the rootmean square value of the tire dynamic displacement were compared with the simulation results.Multi-mode switching controlmodel of the hybrid suspension can effectively switch and reach the switching target,help hybrid suspension with energy recovery and improve the comprehensive performance of the hybrid suspension.
hybrid suspension;energy-regeneration;multi-mode switching;dynamic modeling
U463.33
A
1000-1298(2017)07-0353-08
2016-10-25
2017-02-06
國(guó)家自然科學(xué)基金項(xiàng)目(51575240)、江蘇省教育廳自然科學(xué)基金重大項(xiàng)目(15KJA460005)和鎮(zhèn)江市工業(yè)支撐項(xiàng)目(GY2015029)
汪若塵(1977—),男,教授,博士生導(dǎo)師,主要從事車輛動(dòng)態(tài)性能模擬與控制研究,E-mail:wrc@ujs.edu.cn
10.6041/j.issn.1000-1298.2017.07.045
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
