沉管隧道沉放對接監(jiān)控中的超聲陣列測量及其關(guān)鍵算法
2017-08-08 02:38:40趙朋輝柴修偉胡勇前閻要鋒
武漢工程大學(xué)學(xué)報 2017年4期
趙朋輝,柴修偉,胡勇前,孫 斌,閻要鋒
1.佛山新城建設(shè)開發(fā)有限公司,廣東 佛山 528000;2.武漢工程大學(xué)資源與土木工程學(xué)院,湖北 武漢 430074;3.上海海科工程咨詢有限公司,上海 200231
沉管隧道沉放對接監(jiān)控中的超聲陣列測量及其關(guān)鍵算法
趙朋輝1,柴修偉2*,胡勇前1,孫 斌3,閻要鋒2
1.佛山新城建設(shè)開發(fā)有限公司,廣東 佛山 528000;2.武漢工程大學(xué)資源與土木工程學(xué)院,湖北 武漢 430074;3.上海海科工程咨詢有限公司,上海 200231
水下高精度沉放對接是沉管隧道施工的一個關(guān)鍵環(huán)節(jié),對測量方法的環(huán)境適應(yīng)性和精度等指標(biāo)要求很高.目前實際工程中多采用高精度全站儀測量和剛性測量塔傳遞坐標(biāo)的方法;此外,國外提出水下聲吶測量方法,環(huán)境適應(yīng)性強,且精度不隨隧道長度增加而下降.本文通過對水下聲吶法進行創(chuàng)新改進,采用三點后方交會方法,提出超聲陣列測量方法,并用于佛山汾江路南延線沉管隧道工程中管段沉放對接的測量監(jiān)控試驗,并將測量結(jié)果與高精度全站儀測量結(jié)果進行了對比分析.現(xiàn)場監(jiān)測試驗結(jié)果表明,該方法能夠滿足工程需要,在管段間距2 m時,三軸坐標(biāo)測量精度不大于±45 mm.
沉管隧道;超聲陣列測量系統(tǒng);沉放和對接;算法
沉管隧道采用水上預(yù)制混凝土沉箱,拖運到預(yù)定位置后下沉,并利用水壓將前后兩節(jié)管段連接起來,最終貫通形成水下隧道.1959年加拿大成功采用水力壓接法建成迪斯隧道,標(biāo)志著沉管隧道關(guān)鍵技術(shù)的突破,使得沉管法很快被世界各國普遍采用.截至2001年,世界上有近20多個國家采用沉管隧道技術(shù)修建了130多座水下隧道[1-2].已建成沉管隧道中,里程最長的是1969年美國建成的舊金山海灣快速交通隧道,也是目前世界上最長的沉管隧道,全長5 825 m,由58節(jié)管段組成[3-4].我國大陸地區(qū)已建成20多條,其中港珠澳大橋隧道全長5 664 m,由33節(jié)鋼筋混凝土沉箱組成[5-7].
目前,沉管隧道沉放對接監(jiān)控測量主要采用全站儀和潛水探摸結(jié)合的方法.沉放初期,采用全站儀進行管段空間定位,當(dāng)管段之間的距離靠近到20 cm以內(nèi)時,由潛水員入水探摸檢測,保證管段間對接到位[8-9].經(jīng)過長期的實踐、總結(jié)和完善,該方法已基本成熟,廣泛應(yīng)用在內(nèi)河沉管隧道對接測量中,包括廣州珠江隧道、寧波常洪隧道、上海外環(huán)隧道、佛山汾江路南延線隧道、南昌紅谷灘隧道均采用了該測量方法.另外,還有一些其它的測量方法,如拉線法、水下聲吶法等.其中,水下聲吶法采用聲波測量方式對管段進行空間定位進而達到測量監(jiān)控目的[10-12].該方法已經(jīng)應(yīng)用在日本京葉線臺場隧道、日本多摩川隧道和土耳其博斯普魯斯海峽沉管隧道的沉放對接測量中[13-16].該測量技術(shù)由日本公司壟斷,長期限制技術(shù)出口轉(zhuǎn)讓,只提供工程服務(wù),且收費十分昂貴.
本文提出的超聲陣列測量法是在水下聲吶法基礎(chǔ)上改進而成的,采用三點后方交會方法,即已知空間3個點的坐標(biāo)和未知點到該3點的空間距離計算得出未知點的空間坐標(biāo).下面對該測量系統(tǒng)的組成、原理、實施流程和關(guān)鍵算法進行分析.
1 測量原理與系統(tǒng)組成
1.1測量原理
該方法是一種相對定位測量方法,其測量結(jié)果是待沉管段與已安裝管段對接端頭間的相對空間位置,當(dāng)管段間距離較近時,該方法具有很高的定位精度.測量陣列由安裝在沉箱頂部的水下超聲傳感器組成,包括接收和發(fā)射兩種.該系統(tǒng)通過測量超聲波在水中的走時計算出兩點間的空間距離,進而求解未知點坐標(biāo)值.一般來說,超聲傳感器陣列組合形式比較靈活,只要滿足求解唯一性即可.文中以3組1發(fā)4收的形式為例,如圖1所示,每個對接面兩側(cè)各布置3組高靈敏度超聲波傳感器,每組傳感器包含1個發(fā)射端和4個接收端.

圖1 水下聲吶定位方式示意圖Fig.1 Diagrammatic sketch of underwater sonar localization
該測量系統(tǒng)采用三點后方交會法計算未知點坐標(biāo),首先通過前期標(biāo)定得到接收陣列傳感器的中心坐標(biāo),并在水下超聲距離測量結(jié)果的基礎(chǔ)上計算得到發(fā)射點的坐標(biāo).發(fā)射傳感器安裝在待對接管段上,每節(jié)管段各安裝3個,也就是最終得到3個點的坐標(biāo)值.由于傳感器中心與待對接管段剛性連接,空間相對位置在測量過程中保持不變,因此可以進一步計算出管段上任意點的空間坐標(biāo).這樣就建立了兩節(jié)管段的準(zhǔn)確空間坐標(biāo)關(guān)系.
1.2 系統(tǒng)組成
整個測量系統(tǒng)包含超聲傳感器陣列、控制系統(tǒng)、通訊系統(tǒng)、計算機終端,如圖2所示.超聲傳感器陣列前面已有介紹,控制系統(tǒng)實現(xiàn)對測量傳感器的收發(fā)控制、采集參數(shù)設(shè)定、采集進程控制、采集模式調(diào)整和數(shù)據(jù)傳輸控制等;通訊系統(tǒng)實現(xiàn)測量終端與計算機終端之間的數(shù)據(jù)和命令交換,該系統(tǒng)中包含了無線和有線兩種模式;計算機終端是整個系統(tǒng)的大腦,指揮整個系統(tǒng)有序工作,同時接收測量終端發(fā)回的測量數(shù)據(jù)并處理、反演出對接管段的相對空間坐標(biāo),并在此基礎(chǔ)上構(gòu)建可視化空間模型并展示測量結(jié)果.
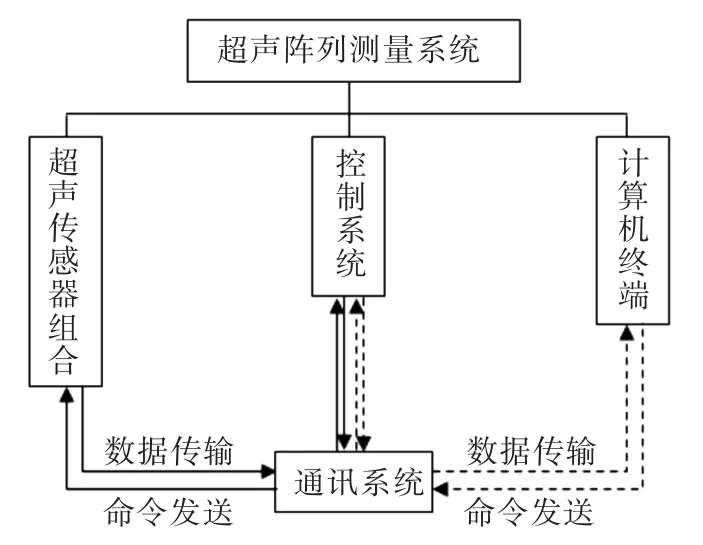
圖2 超聲陣列測量系統(tǒng)組成框架圖Fig.2 Construction of ultrasonic array measurement system
1.3 測量過程
超聲陣列測量過程可以分為4步,包括設(shè)計、加工和預(yù)埋,岸上標(biāo)定,測量前安裝,水下測量與建模.
1)設(shè)計、加工和預(yù)埋.超聲陣列構(gòu)件需滿足防水、穩(wěn)定并保持足夠的剛度,且安裝設(shè)計需考慮管段施工工序.部分測量構(gòu)件需要預(yù)埋,其工序與管段頂面澆筑部分重疊,在鋼筋綁扎時,將測量構(gòu)件的底座按照設(shè)計方案定位后焊接到鋼筋網(wǎng)架上并澆筑混凝土.
2)岸上標(biāo)定.預(yù)埋件安裝后,為確定傳感器陣列與管段的空間相對位置,使用高精度全站儀測量方法得到各個傳感器中心和管段上控制點坐標(biāo).控制點宜選擇斷面結(jié)構(gòu)邊緣拐點的位置,即角點位置.標(biāo)定完成后,暫時拆除預(yù)埋底座上部的超聲陣列測量部件,待管段沉放對接前再安裝.
3)測量前安裝.一般管段浮運到位后需進行二次舾裝,在此期間,擇機安裝超聲陣列測量系統(tǒng).超聲陣列的上部結(jié)構(gòu)按照編號安裝到位,將整個端面上的所有電源和信號電纜一起綁扎后貼著管段內(nèi)邊布線,最后駁船或者控制塔上岸并連接到控制箱.安裝工作完畢后,檢查傳感器陣列、通訊設(shè)備和計算機終端是否正常.
4)水下測量與建模.沉放作業(yè)開始后,隨著管段的下沉,發(fā)射傳感器逐漸淹沒至水下,此時已滿足超聲波傳播條件,啟動超聲陣列測量系統(tǒng)并開始測量監(jiān)控.開始階段,由于收∕發(fā)傳感器組之間的距離在20 m左右,處于信號有效接收的臨界點,信號不穩(wěn)定.隨著管段的下沉和管段間的靠攏,傳播距離逐漸縮小,可以看到聲波信號逐漸增強,首波也逐漸清晰,待所有傳感器首波均可明確提取后啟動測量模塊功能,系統(tǒng)根據(jù)相應(yīng)的算法程序自動計算出兩節(jié)管段的相對空間位置并構(gòu)建其空間三維模型.
2 關(guān)鍵算法
2.1坐標(biāo)系的選擇
文中涉及到標(biāo)定和對接測量2個過程,分別采用不同的坐標(biāo)系.標(biāo)定坐標(biāo)系采用管段制作坐標(biāo)系,該坐標(biāo)系為笛卡爾坐標(biāo)系,遵循右手螺旋法則,記作O1-XYH.水下對接測量采用自建獨立坐標(biāo)系,原點位于已沉放管段底板端頭與中軸線交點,X軸沿管頭斷面向右,Y軸與中軸線重合向外,H垂直于底板向上記作O2-XYH,如圖3所示.
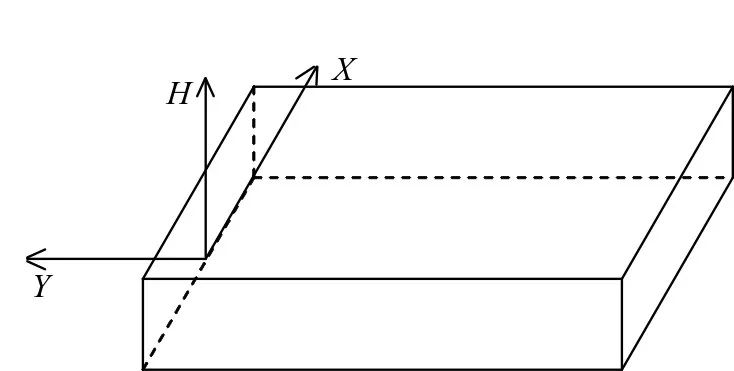
圖3 自建獨立坐標(biāo)系示意圖Fig.3 Schematic diagram of self-built independent coordinate system
2.2 距離后方交會算法
水下超聲陣列測量中,各傳感器測量中心與管段結(jié)構(gòu)的空間相對位置保持不變.本文采用3組陣列的形式,每組包括1發(fā)4收共5個傳感器.測量過程中,通過水下超聲射線測量得到發(fā)射傳感器與同組接收傳感器之間的空間距離.根據(jù)上述射線長度計算出對應(yīng)發(fā)射傳感器中心在O2-XYH坐標(biāo)系下坐標(biāo)值的算法如下.
前期標(biāo)定得到了接收傳感器陣列中心在O1-XYH坐標(biāo)系中的坐標(biāo)值,首先將其轉(zhuǎn)換至O2-XYH坐標(biāo)系下.O1-XYH和O2-XYH均為笛卡爾坐標(biāo)系,對O1-XYH坐標(biāo)系進行平移、旋轉(zhuǎn)等空間變換,最終達到已沉放管段模型在兩坐標(biāo)系中重合,并得到變換過程矩陣積T1,將標(biāo)定坐標(biāo)乘以T1即得到其在O2-XYH坐標(biāo)系中的坐標(biāo).
如圖4所示,A、B、C代表接收傳感器中心,標(biāo)定坐標(biāo)轉(zhuǎn)換至O2-XYH坐標(biāo)系中的空間坐標(biāo)分別為 (XA,YA,ZA) 、(XB,YB,ZB) 和 (XZ,YZ,ZZ).H代表發(fā)射傳感器中心,坐標(biāo)待求.通過水下超聲測量求得收發(fā)傳感器之間的空間距離分別為LA、LB、LC.垂直于DABC并指向 H節(jié)點的向量為PP'=ai+bj+ck.為了計算方便,對模型進行空間平移和旋轉(zhuǎn)變換,結(jié)果如圖5所示,A與原點重合,B位于 X軸上,且DABC與 XOY平面重合.同時添加輔助線HK⊥AB、MK⊥AB、MC//AB且HH'⊥KM.此時,H'的平面坐標(biāo)即為 H的平面坐標(biāo),HH'的長度即為H的Z軸坐標(biāo)值.
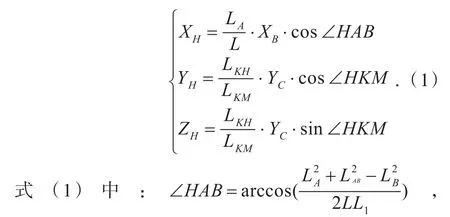
經(jīng)過變換后,A、B、C三點的坐標(biāo)分別為(0,0,0)、(XB,0,0)、(Xc,Yc,0),根據(jù) H 點與3個已知點之間的空間距離求解其坐標(biāo)如下:計算并得出 H點坐標(biāo)后,對其進行反變換,變換順序與正變換流程相反,變換參量值與正變換絕對值相等,符號取反.以此類推,對其他發(fā)射點中心進行處理,最終得到3個點在O2-XYH坐標(biāo)系中的坐標(biāo)值.

圖4 節(jié)點空間位置原型圖Fig.4 Archetype diagram of node space position
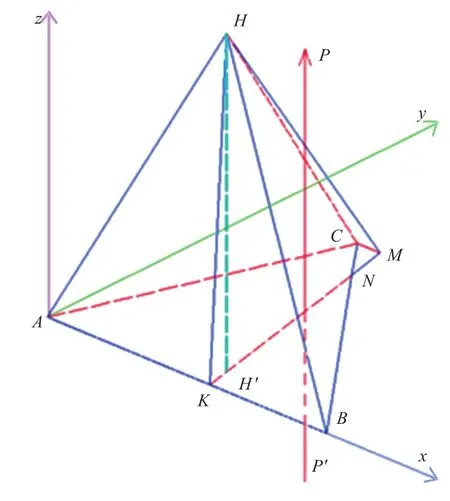
圖5 節(jié)點變換后空間位置圖Fig.5 Space position diagram of node transformation
2.3 控制點坐標(biāo)計算
在兩節(jié)管段對接面的轉(zhuǎn)角位置附近鏡像對稱各設(shè)置了4個控制點,如圖6所示,最終對接完成后,對稱的控制點應(yīng)滿足一定的相對空間坐標(biāo)關(guān)系.管段制作完成后,控制點與超聲陣列測量中心同時在干塢內(nèi)進行標(biāo)定,得到O1-XYH坐標(biāo)系下坐標(biāo).
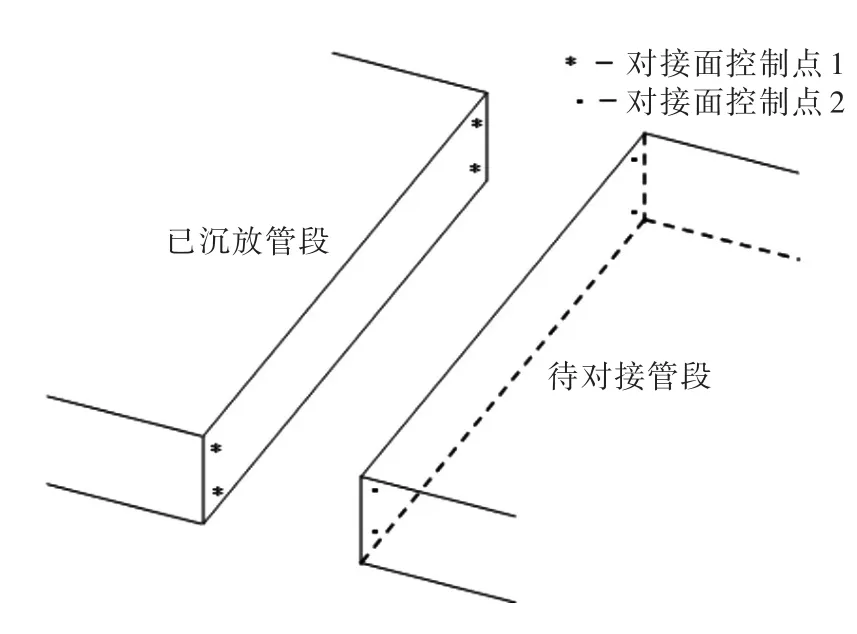
圖6 對接控制點布置示意圖Fig.6 Schematic diagram of jointing points layout
2.2節(jié)中計算得出了待對接管段上3個發(fā)射傳感器中心的坐標(biāo).由于同一管段上控制點與傳感器中心在對接過程中相對空間位置保持不變,據(jù)此可以計算得出兩節(jié)管段上8個控制點在O2-XYH下的坐標(biāo).計算步驟如下:
1)已沉放管段上4個控制點在O2-XYH中坐標(biāo)值計算:將前期標(biāo)定得到的控制點在O1-XYH中的坐標(biāo)值乘以2.2節(jié)中的轉(zhuǎn)換矩陣T1.
2)待對接管段上4個控制點從O1-XYH至O2-XYH坐標(biāo)轉(zhuǎn)換矩陣計算:由3個發(fā)射傳感器中心組成的三角形在O1-XYH和O2-XYH兩個坐標(biāo)系中分別表示為DABC和DA'B'C',平面法線向量分別為PP'和 KK'.經(jīng)過平移和旋轉(zhuǎn)變換,DABC與DA'B'C'完全重合,且 PP'=KK',該過程的齊次變換矩陣積為T2.
3)待對接管段上4個控制點在O2-XYH中坐標(biāo)值計算:由于待對接管段上發(fā)射傳感器中心與控制點的空間相對位置保持不變,因此上一步中的齊次變換矩陣T2即是兩個坐標(biāo)系之間的轉(zhuǎn)換矩陣,設(shè)控制點在O1-XYH中的齊次坐標(biāo)為(x,y,z,1),則在O2-XYH中的齊次坐標(biāo)如下:

至此,得到了O2-XYH坐標(biāo)系中8個控制點在沉放對接測量過程中的空間坐標(biāo)值.文中采用了全站儀和超聲陣列測量結(jié)果對比的方法,分別比較2種測量方法得到的三軸坐標(biāo)值,通過坐標(biāo)差值的分析,對超聲陣列測量系統(tǒng)的性能和指標(biāo)進行評價.
3 工程實例
佛山市汾江路南延線工程沉管隧道段全長為445 m,共分 4節(jié)管段,編號分別為 E1、E2、E3和E4,管節(jié)長度分別為115 m、115 m、105 m和110 m.管節(jié)標(biāo)準(zhǔn)斷面寬39.9 m,高9.0 m.E4管節(jié)分2段,分別為E4-1和E4-2,E3與E4-1在岸上進行拉合,記作E3&E4-1(下同).管段安裝順序為E1→E2→E4-2→E3&E4-1,最 終 水 下 接 頭 位 于 E4-2、E3&E4-1之間.
沉放過程采用全站儀測量和潛水探摸相結(jié)合的方式,2個測量塔頂端各安裝一個棱鏡,在管內(nèi)安裝有高精度傾斜儀,通過棱鏡中心坐標(biāo)結(jié)合橫、縱傾角度得到整個管段的位置和姿態(tài).同時,結(jié)合該工程進行了超聲陣列測量系統(tǒng)試驗,并將測量結(jié)果與全站儀測量結(jié)果進行比較和分析,得出其可靠性和精度指標(biāo).文中以E2、E3&E4-1管段間試驗為例進行分析.按照預(yù)定方案進行了測量部件的安裝、調(diào)試和現(xiàn)場測量,并得到了測量結(jié)果,沉放前后各管段狀態(tài)如圖7所示.
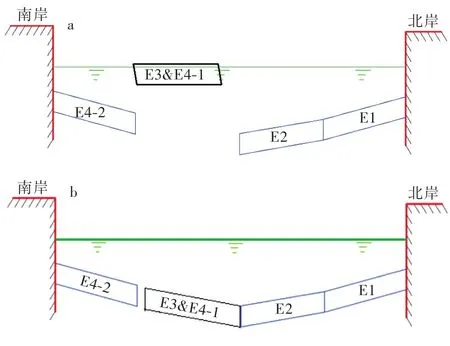
圖7 E3&E4-1對接前后的管段狀態(tài)示意圖(a)E3&E4-1沉放前各管段狀態(tài),(b)E3&E4-1對接安裝后各管段狀態(tài)Fig.7 Diagrammatic sketch of states of tube tunnels before and after E3&E4-1 section docking(a)E3&E4-1 section state before immersion;(b)E3&E4-1 section state after immersion
為了方便與全站儀測量結(jié)果進行比較,分別將2種測量結(jié)果全部轉(zhuǎn)化到佛山城建坐標(biāo)系下,并根據(jù)測量坐標(biāo)和管段的幾何尺寸信息建立了沉放過程的三維可視化模型,如圖8所示.
圖9 為沉放過程待對接管段E3&E4-1上4個控制點上2種測量結(jié)果(超聲陣列和全站儀2種方式)的三軸坐標(biāo)差.由圖9可知,超聲陣列測量結(jié)果與全站儀測量結(jié)果非常接近,且隨著距離的靠近,精度越來越高.但是受到水流變化、泥沙、懸浮物等不確定因素的影響,精度呈現(xiàn)區(qū)域不規(guī)律波動的特征.如圖10所示,當(dāng)距離縮小到2 m以內(nèi)時,波動范圍基本在一個區(qū)間內(nèi)變化(<45 mm),具體見表1.
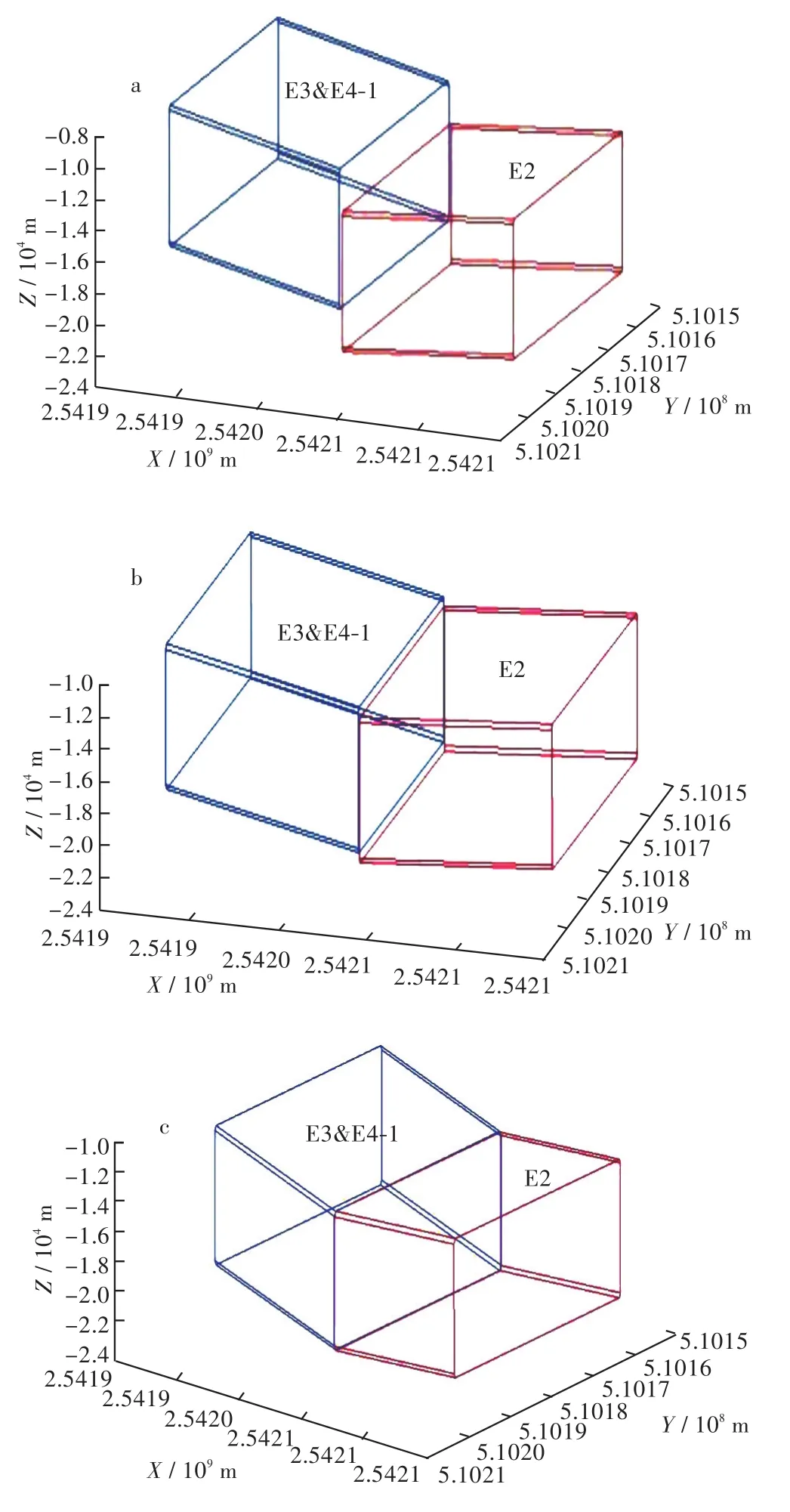
圖8 E2-E3&E4-1對接的超聲陣列測量結(jié)果三維模型圖(a)12:06:11時刻E2-E3&E4-1空間姿態(tài),(b)13:00:37時刻E2-E3&E4-1空間姿態(tài),(c)14:02:14時刻對接完成后E2-E3&E4-1空間姿態(tài)Fig.8 Three-dimensional model of ultrasonic array measurements'result of E2-E3&E4-1 docking(a)E2-E3&E4-1 pace attitude s at 12:06:11;(b)E2-E3&E4-1 space attitude at 13:00:37;(c)E2-E3&E4-1 space attitude at 14:02:14
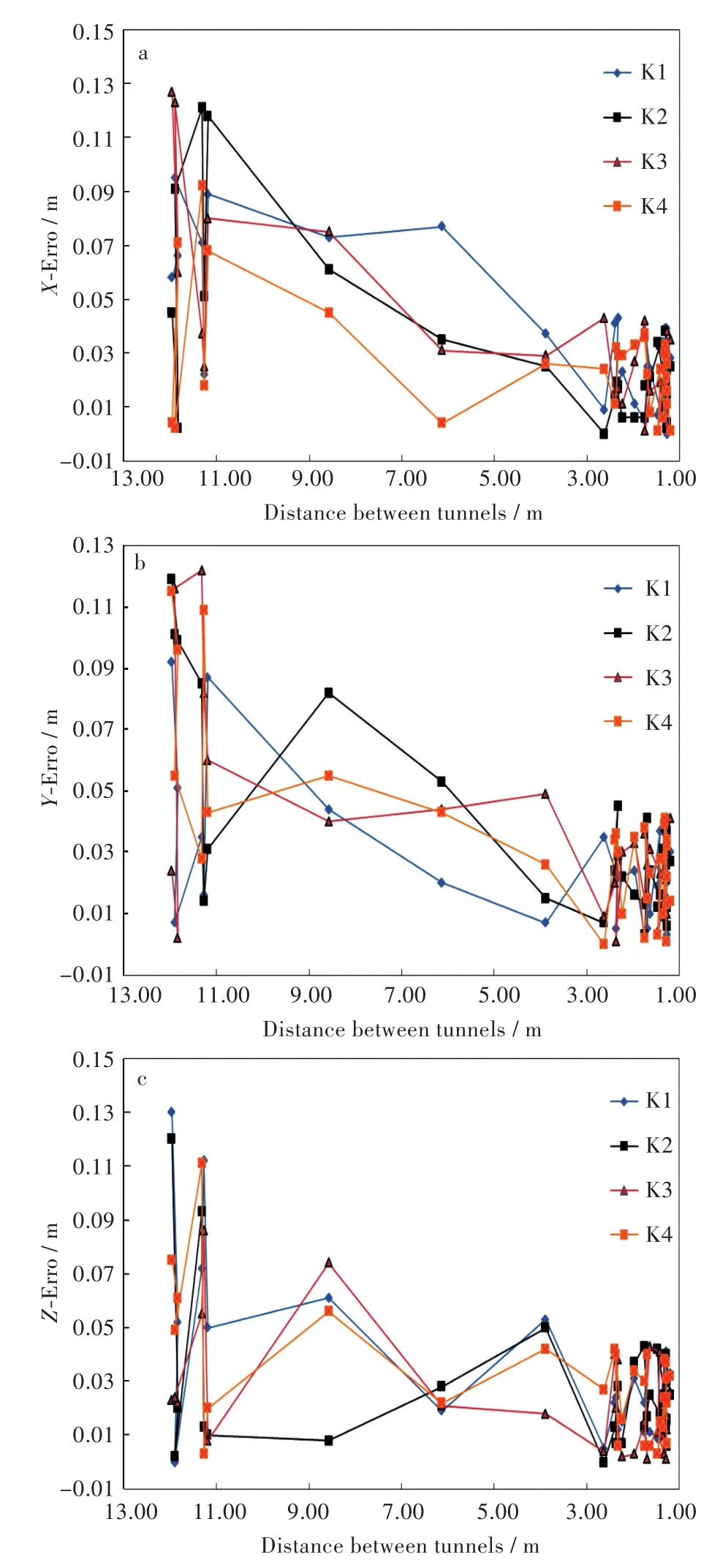
圖9 超聲陣列系統(tǒng)與全站儀測量結(jié)果的三軸坐標(biāo)差值圖(12.0 m ~1.2 m)(a)X坐標(biāo)差值圖,(b)Y坐標(biāo)差值圖,(c)Z坐標(biāo)差值圖Fig.9 Three-axis errors diagrams between ultrasonic array and total-station measurement(12.0 m-1.2 m)(a)X-axis errors;(b)Y-axis errors;(c)Z-axis errors
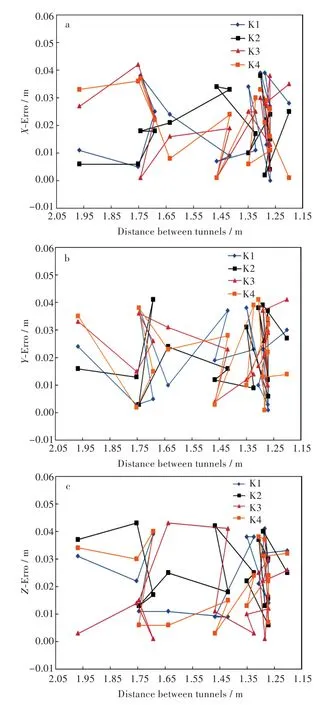
圖10 超聲陣列系統(tǒng)與全站儀測量結(jié)果的三軸坐標(biāo)差值圖(2.0 m ~1.2 m)(a)X坐標(biāo)差值圖,(b)Y坐標(biāo)差值圖,(c)Z坐標(biāo)差值圖Fig.10 Three-axis errors diagrams between ultrasonic array and total-station measurement(2.0 m-1.2 m)(a)X-axis errors;(b)Y-axis errors;(c)Z-axis errors

表1 測量結(jié)果統(tǒng)計Tab.1 Statistics of measurement results
4 結(jié) 語
在分析沉管隧道工藝和超聲陣列測量系統(tǒng)組成、原理的基礎(chǔ)上,對超聲陣列測量方法的數(shù)學(xué)過程進行了深入分析和闡述,包括三點距離后方交會算法及其它相關(guān)算法.結(jié)合佛山汾江路南延線沉管隧道工程進行了工程試驗,并對試驗結(jié)果進行了分析,主要結(jié)論如下:
1)超聲陣列測量方法利用水下超聲波測距精度高的優(yōu)點,結(jié)合沉管隧道水下對接時空間距離短、管段頂部易于預(yù)埋超聲測量件的優(yōu)勢,采用空間解析幾何算法換算出統(tǒng)一坐標(biāo)系下所有控制點的空間坐標(biāo)值,以達到判斷管段空間相對位置的目的.
2)采用幾何解析的方法給出了詳細(xì)求解過程,該測量系統(tǒng)涉及到復(fù)雜的坐標(biāo)、坐標(biāo)系和圖形變換,給出了變換過程.
3)結(jié)合佛山汾江路南延線沉管隧道工程進行了超聲陣列測量試驗,并將測量結(jié)果與高精度全站儀測量結(jié)果進行了對比分析,在兩管段相距2 m以內(nèi)時,水下超聲陣列方法在三軸方向上的坐標(biāo)差最大為45 mm.結(jié)果表明文中采用的算法過程是可行的.
[1]潘永仁,丁美.大型沉管隧道管段沉放施工技術(shù)[J].現(xiàn)代隧道技術(shù),2004,41(5):1-5.PAN Y R,DING M.Techniques for sinking and jointing tube sections of large immersed tube tunnel[J].Modern Tunneling Technology,2004,41(5):1-5.
[2]胡政才,先其明,馬積薪.日本多摩川沉管隧道的設(shè)計與施工[J].世界隧道,1995(5):52-75.HU Z C,XIAN Q M,MA J X.Design and construction of tamagawa immersed tunnel in Japan [J].World Tunneling,1995(5):52-75.
[3]寧茂權(quán),肖明清.海底沉管隧道關(guān)鍵技術(shù)設(shè)計與分析[J].鐵道工程學(xué)報,2008,119(8):50-57.NING M Q,SHAO M Q.Design and analysis of key technology about channel immersed tunnel[J].Journal of Railway Engineering Society,2008,119(8):50-57.
[4]王朝輝.內(nèi)河沉管隧道浮運沉放施工技術(shù)[J].施工技術(shù),2012,41(18):117-120.WANG C H.Construction technology of floating and sinking of immersed tunnel crossing inland river[J].Construction Technology,2012,41(18):117-120.
[5]聶美琳譯.京葉臺場隧道[J].世界沉管隧道技術(shù),1998(5):41-85.NIE M L(Translated).Keiyo odaiba tunnel[J].World Immersed Tunnel Technology,1998(5):41-85.
[6]RASMUSSEN N S.Concrete immersed tunnels-forty years of experience[J].Tunneling and Underground Space Technology,1997,12(1):33-46.
[7]GURSOY A.Immersed steel tube tunnels:an American experience [J].Tunneling and Underground Space Technology,1995,10(4):439-453.
[8]王解先,許琛,陸彩萍.沉管沉放的實時監(jiān)測[J].測繪學(xué)報,2002,31(增刊):70-72.WANG J X,XU C,LU C P.Real-time surveying of immersed tube allocation[J].Journal of Geodesy and Geo-Information,2002,31(Suppl.):70-72.
[9]潘永仁.上海外環(huán)沉管隧道大型管段浮運方法[J].施工技術(shù),2004,33(5):52-54.PAN Y R.The floating transport method of large elements employed for Shanghai out-ring immersed tube tunnel[J].Construction Technology,2004,33(5):52-54.
[10]吳瑞大,方長遠.適合近岸管節(jié)水下施工的測量塔全站儀定位方法[J].中國港灣建設(shè),2012(4):43-46.WU R D,F(xiàn)ANG C Y.Positioning methods by total stations forsurvey towerssuitable fornear-shore underwater laying of tunnel sections[J].China Harbor Engineering,2012(4):43-46.
[11]鄧建林.沈家門港海底沉管隧道浮運、沉放施工控制技術(shù)[J].隧道建設(shè),2015,35(9):914-919.DENG J L.Control technology for towing and sinking of immersed tubes:case study on Shenjiamen port sub-sea tunnel[J].Tunnel Construction,2015,35(9):914-919.
[12]郭建文.海河隧道沉管沉放對接的主要施工技術(shù)[J].鐵道標(biāo)準(zhǔn)設(shè)計,2013(4):73-77.GUO J W.Key construction technologies of sinking and docking of immersed tube of Haihe river tunnel[J].Railway Standard Design,2013(4):73-77.
[13]申琪玉,邱峰,張海燕.廣州洲頭咀隧道管段浮運沉放關(guān)鍵技術(shù)研究[J].施工技術(shù),2010,39(5):15-17.SHEN Q Y,QIU F,ZHANG H Y.Research on key sinking technology of pipe sections in Guangzhou Zhou?touzui immersed tunnel[J].Construction Technology,2010,39(5):15-17.
[14]任朝軍,蘇林王,呂黃,等.聲納法在管節(jié)沉放實時定位測量中的應(yīng)用[J].現(xiàn)代隧道技術(shù),2012,49(5):132-135.REN C J,SU L W,Lü H,et al.Application of the sonar method to real-time positioning measurement for an immersed element [J]. Modern Tunneling Technology,2012,49(5):132-135.
[15]郭祿光,樊功瑜.最小二乘法與測量平差[M].上海:同濟大學(xué)出版社,1984.
[16]田青文,劉萬林.控制測量學(xué)[M].西安:西安地圖出版社,2004.
本文編輯:苗 變
Ultrasonic Array Measurement and Key Algorithm in Monitoring of Immersing and Docking of Immersed Tube Tunnel
ZHAO Penghui1,CHAI Xiuwei2*,HU Yongqian1,SUN Bin3,YAN Yaofeng2
1.Foshan New Town Construction Development Co.,LTD,F(xiàn)oshan 528000,China;2.School of Resource and Civil Engineering,Wuhan Institute of Technology,Wuhan 430074,China;3.Shanghai Heike Engineering Consulting Co.,LTD,Shanghai 200231,China
The high precision immersion and docking is the key part in immersed tube tunnel construction,which requires better environmental adaptation and high accuracy to the measurement system.Now,the high-precision total station and rigid measurement tower are commonly used in actual engineering.Moreover,the sonar method is also proposed in foreign country,which has good adaption to the surrounding and its precision does not decline with the tunnel length increasing.Through innovation and improvement based on the underwater sonar methods,the ultrasonic array measurement system was proposed by the three points resection method and was used to measure and monitor the immersed tube tunnel immersing and docking process of Foshan Fenjiang road extending to the south.Compared with the high-precision total station,the method can meet the needs of engineering,and the 3-axis measurement precision can be controlled between+45 mm and-45 mm when the distance between two tubes is 2 m.
immersed tunnel;ultrasonic array measurement system;immersing and docking;algorithm
TU354
A
10.3969∕j.issn.1674?2869.2017.04.009
2017-03-30
趙朋輝,碩士,高級工程師.E-mail:1030064866@qq.com
*通訊作者:柴修偉,博士,副教授.E-mail:342650018@qq.com
趙朋輝,柴修偉,胡勇前,等.沉管隧道沉放對接監(jiān)控中的超聲陣列測量及其關(guān)鍵算法[J].武漢工程大學(xué)學(xué)報,2017,39(4):359-365.
ZHAO P H,CHAI X W,HU Y Q,et al.Ultrasonic array measurement and key algorithm in monitoring of immersing and docking of immersed tube tunnel[J].Journal of Wuhan Institute of Technology,2017,39(4):359-365.
1674-2869(2017)04-0359-07
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08