基于雙目立體視覺(jué)的三維拼接和融合方法
2017-08-08 03:01:10張曉林
電子設(shè)計(jì)工程 2017年14期
陳 曦,張曉林
(中國(guó)科學(xué)院 上海微系統(tǒng)與信息技術(shù)研究所,上海200050)
基于雙目立體視覺(jué)的三維拼接和融合方法
陳 曦,張曉林
(中國(guó)科學(xué)院 上海微系統(tǒng)與信息技術(shù)研究所,上海200050)
為了獲得更為全面的三維信息,本文提出了基于雙目立體視覺(jué)圖像的三維拼接和融合的解決方法,并且完成了算法的實(shí)現(xiàn)。本方法僅使用雙目圖像作為輸入,完成了高效的空間轉(zhuǎn)換,并側(cè)重于利用重投影融合和場(chǎng)景信息建模的方法對(duì)空間開(kāi)銷的控制,提高了處理的效率。同時(shí),為了方便三維信息的觀察和效果顯示,對(duì)三維數(shù)據(jù)進(jìn)行了可視化。經(jīng)實(shí)驗(yàn)證明,本方法不僅能夠用于拼接和融合三維數(shù)據(jù),更能較好地用于顯示三維數(shù)據(jù)。
三維數(shù)據(jù);拼接;融合;立體視覺(jué)
目前,在計(jì)算機(jī)視覺(jué)領(lǐng)域,越來(lái)越多的高精度三維重建方法以及實(shí)時(shí)定位和地圖構(gòu)建(SLAM)[1]算法正在被提出用來(lái)對(duì)三維世界進(jìn)行描述和分析。在計(jì)算機(jī)圖形領(lǐng)域,快速和精細(xì)的三維建模與逼真的人機(jī)交互使得三維模型帶給人超越真實(shí)的感受。自動(dòng)駕駛[2]、機(jī)器人自主行走[3]、虛擬現(xiàn)實(shí)[4]和增強(qiáng)現(xiàn)實(shí)等應(yīng)用場(chǎng)景中[5-6],三維數(shù)據(jù)被廣泛地用來(lái)滿足各種需求。三維數(shù)據(jù)的拼接與融合是對(duì)三維數(shù)據(jù)進(jìn)行處理和建模抽象的重要步驟。通過(guò)三維數(shù)據(jù)的拼接與融合,局部三維數(shù)據(jù)得以整合,可以得到全面反應(yīng)采集對(duì)象特征的全局模型。
三維數(shù)據(jù)的獲取方式有很多,包括主動(dòng)式的方式,如激光[7]、紅外測(cè)量[8];也包括被動(dòng)式的方式,如視覺(jué)系統(tǒng)測(cè)量。主動(dòng)式的方式通常可以獲得較為準(zhǔn)確的深度信息。然而,由于缺乏被測(cè)量對(duì)象的紋理信息,在三維拼接和融合中難以借助紋理信息對(duì)深度信息進(jìn)行更好的處理。被動(dòng)式的方式中,尤其是針對(duì)于視覺(jué)系統(tǒng)的三維拼接與融合,可以有效的利用紋理信息對(duì)拼接和融合進(jìn)行促進(jìn)。在自動(dòng)駕駛,機(jī)器人自主行走領(lǐng)域,使用視覺(jué)系統(tǒng)對(duì)地圖信息進(jìn)行重建,利用三維拼接和融合技術(shù)得到信息更為全面的地圖,可以為后續(xù)的場(chǎng)景識(shí)別與定位,障礙物判斷提供基礎(chǔ)。
在能夠重建三維信息的視覺(jué)系統(tǒng)中,雙目立體視覺(jué)系統(tǒng)[9]了很廣泛研究和應(yīng)用。獲取景物的三維信息的方法是使用兩個(gè)視點(diǎn)觀察同一景物,以獲取在不同視角下的圖像,通過(guò)計(jì)算兩幅圖像的對(duì)應(yīng)像素的位置偏差(即視差)配合三角測(cè)量原理[10]。在獲取三維信息后就可以利用本文的方法進(jìn)行高效地、低空間開(kāi)銷地三維數(shù)據(jù)的拼接和融合。
1 三維數(shù)據(jù)的拼接
三維數(shù)據(jù)的拼接是將獲取到的三維數(shù)據(jù)進(jìn)行空間轉(zhuǎn)換,統(tǒng)一到相同的空間內(nèi)的過(guò)程。對(duì)于三維數(shù)據(jù)的獲取,在文中采用了基于雙目立體視覺(jué)的大規(guī)模有效立體匹配方法獲得局部的三維信息[11]。在拼接時(shí),結(jié)合雙目視覺(jué)系統(tǒng)的特性,利用圖像的特征,文中采用幀間的運(yùn)動(dòng)估計(jì)的策略[12]來(lái)計(jì)算相機(jī)的運(yùn)動(dòng)從而得到空間轉(zhuǎn)換的關(guān)系,能夠達(dá)到準(zhǔn)實(shí)時(shí)處理速度。具體如下:
第一步,使用角點(diǎn)和區(qū)域特征雙目圖像進(jìn)行特征提取,并用sobel算子作為前后左右?guī)奶卣髅枋鲎樱M(jìn)行特征的匹配。
第二步,對(duì)匹配好的特征進(jìn)行聚合,使其數(shù)目減少,并盡量均勻分布在整幅圖像上。使用立體視覺(jué)的標(biāo)定的相機(jī)內(nèi)參,假設(shè)沒(méi)有畸變,構(gòu)建出如公式(1)所示的三維模型。
其中,(u v 1)T是當(dāng)前圖像的齊次坐標(biāo),f是焦距,(cu,cv)為主點(diǎn)的坐標(biāo),R(r)=Rx(rx)Ry(ry)Rz(rz)旋轉(zhuǎn)矩陣,t=(txtytz)T為平移向量,前序三維點(diǎn)坐標(biāo)X=(x y z)T,s為以左攝像機(jī)為基準(zhǔn)的基線長(zhǎng)度。
現(xiàn)設(shè) π(l)(X;r,t):R3→R2是由(1)建立的映射,將一個(gè)三維點(diǎn)X映射為一個(gè)左圖像平面上的一個(gè)像素x(l)i∈R2。 同理,令 π(r)(X;r,t)為到右圖像上的一個(gè)映射。使用高斯-牛頓優(yōu)化,針對(duì)于空間轉(zhuǎn)換參數(shù)(r,t),迭代最小化公式(2)。

第三步,使用一個(gè)標(biāo)準(zhǔn)卡爾曼濾波器,并做了連續(xù)加速假設(shè)。我們首先獲得了速度向量v=(r t)T/Δt,Δt為幀間時(shí)間。狀態(tài)方程由下給出:

因?yàn)榭梢灾苯佑^測(cè)ν,輸出方程化為:

這里,a代表加速度,I為一個(gè)6階的單位陣。ε和ν各自代表高斯過(guò)程的測(cè)量誤差。
通過(guò)迭代優(yōu)化,通過(guò)方程1可以得到相機(jī)的運(yùn)動(dòng)的旋轉(zhuǎn)平移矩陣(R(r)t)。 在齊次坐標(biāo)下,此矩陣可以表示為

相機(jī)是三維數(shù)據(jù)的局部坐標(biāo),得到局部坐標(biāo)轉(zhuǎn)換關(guān)系后Hc,可以得到坐標(biāo)中的三維數(shù)據(jù)的對(duì)應(yīng)的轉(zhuǎn)換關(guān)系Hp為:

通過(guò)三維數(shù)據(jù)的對(duì)應(yīng)轉(zhuǎn)換關(guān)系Hp,可以將三維數(shù)據(jù)統(tǒng)一到初始相機(jī)所在的坐標(biāo)系中。
記初始幀為第0幀。用基于運(yùn)動(dòng)估計(jì)的方法計(jì)算出空間轉(zhuǎn)換矩陣如表1所示。

表1 空間轉(zhuǎn)換結(jié)果示例
2 三維數(shù)據(jù)的融合
在對(duì)三維數(shù)據(jù)進(jìn)行了空間轉(zhuǎn)換后,所有三維數(shù)據(jù)都處在世界坐標(biāo)為初始相機(jī)坐標(biāo)的坐標(biāo)系下。三維數(shù)據(jù)需要進(jìn)行融合以達(dá)到重疊部分?jǐn)?shù)據(jù)冗余去除并且光滑平順的目的。最常用的方法是光束平差法(Bundle adjust)[14]。光束平差法后續(xù)需要解決優(yōu)化問(wèn)題,因而在時(shí)間和空間上的開(kāi)銷過(guò)大。在本方法中,相機(jī)模型和各幀之間的空間轉(zhuǎn)換都已求得,因此采用將前序三維信息投影至當(dāng)前幀所在的圖像平面進(jìn)行融合的算法。這種算法更為快速,而且可以消除一定程度上的隨機(jī)噪聲,非常適合于對(duì)實(shí)時(shí)性有所要求的三維數(shù)據(jù)融合。
首先,利用相機(jī)模型和空間轉(zhuǎn)換矩陣將前序三維數(shù)據(jù)投影至當(dāng)前圖像平面,即將三維數(shù)據(jù)降維成二維數(shù)據(jù)。在這里重寫(xiě)三維數(shù)據(jù)到圖像平面的映射公式:
其中,(xprevyprevzprev1)T是之前幀中的三維點(diǎn)的齊次坐標(biāo),(up2n,vp2n)是重投影到當(dāng)前幀的圖像平面的坐標(biāo)。
第二步,投影后在視差圖D上找到對(duì)應(yīng)視差D(up2n,vp2n),作為三維信息是否有效的標(biāo)準(zhǔn),有效的三維點(diǎn)(xprev,yprev,zprev,1)T可以作為融合的備選點(diǎn)。
第三步, 對(duì)于有效的之前幀中的點(diǎn)(xprev,yprev,zprev,1)T,通過(guò) D(up2n,vp2n)找到在對(duì)應(yīng)的當(dāng)前幀中的點(diǎn)(xprev,yprev,zprev,1)T,計(jì)算兩點(diǎn)間的歐式距離:

第四步,在某種距離范圍內(nèi)的點(diǎn),即deu<dthreshold可以進(jìn)行融合,dthreshold是距離閾值。融合的策略是使用重疊點(diǎn)的平均值代替重疊點(diǎn)。如果距離較遠(yuǎn)就不進(jìn)行融合而作為新的數(shù)據(jù)加入當(dāng)前幀中,并從之前幀去除。
綜合精度和效率進(jìn)行融合之后,三維數(shù)據(jù)重疊部分的數(shù)據(jù)進(jìn)行了精簡(jiǎn)。經(jīng)過(guò)對(duì)10幅圖像的實(shí)驗(yàn)可以看到,在相鄰幀之間數(shù)據(jù)量平均減少了31.05%。記初始幀為第0幀,具體結(jié)果如表2所示。
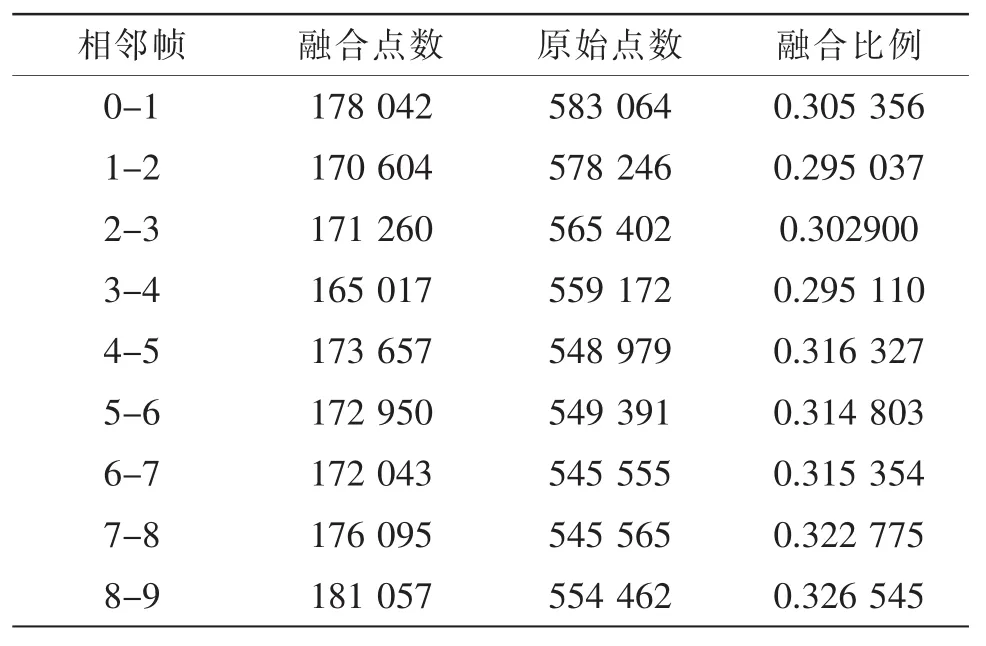
表2 三維數(shù)據(jù)融合結(jié)果
融合的結(jié)果使用點(diǎn)云來(lái)對(duì)三維數(shù)據(jù)進(jìn)行可視化表達(dá)。其中融合前的三維數(shù)據(jù)如圖1中(a)所示,暗灰色為第0幀,亮灰色為第1幀。融合后的三維數(shù)據(jù)如圖1中(b)所示,可以看到點(diǎn)云變得更加光滑和平順。將紋理加入點(diǎn)云中,效果如圖3中(c)所示。經(jīng)融合并加入紋理的點(diǎn)云,已經(jīng)能夠較好的重建和表現(xiàn)場(chǎng)景了。

圖1 三維數(shù)據(jù)融合
3 道路場(chǎng)景建模
融合后的三維數(shù)據(jù)可以對(duì)其中的場(chǎng)景信息進(jìn)行建模,用來(lái)減少冗余的三維數(shù)據(jù)和方便顯示和存儲(chǔ)。針對(duì)于室外道路場(chǎng)景,道路的特點(diǎn)包括:可以在一定程度上視為一個(gè)平面、道路邊緣大部分是可以近似看作為平行的線段等。目前,主要的道路檢測(cè)方法是從原始圖像信息中利用道路的幾何特點(diǎn)和紋理信息檢測(cè)方法[15]以及在視差圖中通過(guò)對(duì)視差圖處理構(gòu)建獲得道路的信息。由于本文的主要目的是減少平坦道路的數(shù)據(jù)開(kāi)銷,所以主要側(cè)重于對(duì)較為平坦且邊緣近似為直線段的道路進(jìn)行處理與擬合。
首先,使用邊緣線段檢測(cè)形成二維道路描述子。文中基于概率霍夫變換對(duì)道路邊緣線段進(jìn)行了檢測(cè),形成了一個(gè)多邊形道路描述子。(xp,yp)為二維道路描述子中的點(diǎn),{P|P?R2}為二維描述子點(diǎn)集,包括多邊形內(nèi)部點(diǎn){mp|mp?P}和多邊形邊緣點(diǎn){np|np?P},多邊形頂點(diǎn){k|k∈np}。二維道路描述子如圖2中(a)圖白色區(qū)域所示。
第二步,將二維的道路描述子使用三角測(cè)量法映射到三維空間中形成三維道路描述子 {Q|Q?R3}。此時(shí)三維道路描述子邊緣由兩部分組成:一部分是由二維道路描述子確定的邊界{nq|nq?Q};另一部分是二維描述子內(nèi)部點(diǎn)由于二維的道路描述子邊界視覺(jué)測(cè)量值缺失轉(zhuǎn)換而成邊界點(diǎn) {nqa|nqa?Q},如圖2(b)所示。
第三步,確定三維道路描述子的頂點(diǎn),用三角形網(wǎng)格進(jìn)行擬合。提取頂點(diǎn)策略如下:
1)二維描述子中的頂點(diǎn)k映射到三維后仍然存在的點(diǎn){kq|kq∈nq};

圖2 道路描述子
2)在三維描述子邊緣進(jìn)行搜索,新的頂點(diǎn){kqa|kqa∈nqa},將二維描述子的邊緣映射np到三維中得到點(diǎn)集 nq,則新的頂點(diǎn){kqa|kqa∈nqa∩nq};
3)去除 1)和 2)中的重復(fù)頂點(diǎn)得到{kf|kf∈kqa∪kq}。
第四步,對(duì)后續(xù)圖像進(jìn)行描述子頂點(diǎn)進(jìn)行提取和處理。采用增量式方法,若后續(xù)頂點(diǎn)在之前頂點(diǎn)的范圍之內(nèi)就不進(jìn)行繪制,若后續(xù)頂點(diǎn)在之前頂點(diǎn)范圍外則進(jìn)行繪制,效果如圖3(a)(b)所示。加入拼接和融合的其他場(chǎng)景信息如圖3(c)所示。

圖3 路面網(wǎng)格擬合
4 結(jié) 論
文中基于雙目視覺(jué)系統(tǒng)的特點(diǎn),提出了基于雙目圖像的拼接和融合的方法,對(duì)場(chǎng)景進(jìn)行了建模和重建。相比于傳統(tǒng)的三維拼接與融合方法,本方法更多的使用了圖像的特征,使得三維拼接與融合的過(guò)程更加可靠和穩(wěn)定。特別的,本方法利用重投影融合以及路面場(chǎng)景建模對(duì)空間開(kāi)銷進(jìn)行了極大的縮減,有利于后續(xù)對(duì)于特大場(chǎng)景的重建和存儲(chǔ),對(duì)于汽車自動(dòng)駕駛和機(jī)器人自主行走的地圖建立奠定了基礎(chǔ)。
[1]Fuentes-Pacheco J,Ruiz-Ascencio J,Rendón-Mancha J M.Visual simultaneous localization and mapping:a survey [J].ArtificialIntelligence Review,2015,43(1):55-81.
[2]Fernandes L C,Souza J R,Shinzato P Y,et al.Intelligent robotic car for autonomous navigation:Platform and system architecture[C]//Critical EmbeddedSystems(CBSEC),2012SecondBrazilian Conference on.IEEE,2012:12-17.
[3]H?ne C,Zach C,Lim J,et al.Stereo depth map fusion for robot navigation[C]//Intelligent Robots and Systems(IROS),2011 IEEE/RSJ International Conference on.IEEE,2011:1618-1625.
[4]Westwood J D.Real-time 3D avatars for telerehabilitation in virtual reality[J].Medicine Meets Virtual Reality 18:NextMed,2011(163):290.
[5]Van Krevelen D W F,Poelman R.A survey of augmented reality technologies,applications and limitations [J].International Journal of Virtual Reality,2010,9(2):1.
[6]Benko H,Jota R,Wilson A.MirageTable:freehand interaction on a projected augmented reality tabletop[C]//Proceedings of the SIGCHI conference on human factors in computing systems.ACM,2012:199-208.
[7]陳田.激光測(cè)量點(diǎn)云的數(shù)據(jù)處理方法研究 [J].激光與光電子學(xué)進(jìn)展,2011,48(9):72-76.
[8]彭祎帆,陶毅陽(yáng),于超,等.基于紅外結(jié)構(gòu)光的三維顯示用交互裝置[J].光學(xué)學(xué)報(bào),2013(4):108-114.
[9]羅桂娥.雙目立體視覺(jué)深度感知與三維重建若干問(wèn)題研究[D].長(zhǎng)沙:中南大學(xué),2012.
[10]靳盼盼.雙目立體視覺(jué)測(cè)距技術(shù)研究[D].西安:長(zhǎng)安大學(xué),2014.
[11]Geiger A,Roser M,Urtasun R.Efficient Large-Scale Stereo Matching[C]//Asian Conference on Computer Vision.Springer-Verlag,2010:25-38.
[12]Fraundorfer F,Scaramuzza D.Visual odometry:Part i:The first 30 years and fundamentals[J].IEEE Robotics and Automation Magazine,2011,18(4):80-92.
[13]Fraundorfer F,Scaramuzza D.Visual odometry:Part II:Matching,robustness,optimization,and applications[J].Robotics&Automation Magazine,IEEE,2012,19(2):78-90.
[14]Salas-Moreno R,Newcombe R,Strasdat H,et al.
Slam++:Simultaneous localisation and mapping at the level of objects[C]//Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition,2013:1352-1359.
[15]Kong H,Audibert J Y,Ponce J.General road detection from a single image [J].Image Processing,IEEE Transactions on,2010,19(8):2211-2220.
3D registration and fusion based on binocular stereo system
CHEN Xi,ZHANG Xiao-lin
(Shanghai Institute of Microsystem and Information Technology,Shanghai 200050,China)
For getting more comprehensive 3D information,this paper presents a registration and fusion method based on binocular stereo vision and completes algorithm implementation This method uses only binocular image as input and completes efficient space transformation,focused on the use reprojection fusion and scene information modeling to control space cost as well as improving efficiency.Meanwhile,the method visualizes 3D data for the convenience of observation.The experiments show that this method can be used for 3D registration and fusion as well as display 3D data.
3D data; registration; fusion; stereo vision
TN919.82
:A
:1674-6236(2017)14-0119-04
2016-05-13稿件編號(hào):201605132
中國(guó)科學(xué)院戰(zhàn)略性先導(dǎo)科技專項(xiàng)(B類)(XDB02080005);上海張江國(guó)家自主創(chuàng)新示范區(qū)專項(xiàng)"張江科技成果轉(zhuǎn)化集聚區(qū)"項(xiàng)目(Y55SYB1J01)
陳 曦(1990—),女,陜西寶雞人,碩士研究生。研究方向:計(jì)算機(jī)視覺(jué)、信號(hào)處理。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
中外會(huì)展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
