基于層次輪廓計算機視覺的交通路標識別
2017-08-08 03:01:08趙鐸
電子設計工程 2017年14期
趙鐸
(陜西交通職業技術學院 信息工程系,陜西 西安710018)
基于層次輪廓計算機視覺的交通路標識別
趙鐸
(陜西交通職業技術學院 信息工程系,陜西 西安710018)
針對現有計算機視覺對交通路標識別的復雜性和不穩定性的問題,通過運用圖像輪廓識別技術,提出了由全局特征到局部特征再到結構特征的多層次輪廓識別,在交通路標的識別過程中,分別構造了圖像密度、形狀度量、光滑程度和輪廓熵值4個層次的圖像輪廓,同時結合Sobel算子和信息熵對交通路標圖像進行了提取與分塊處理。通過實驗仿真結果表明:在圖像的提取過程中,交通路標圖像隨著其DMOS值的增大,圖像的質量越差,清晰度越低,其NRSS值越小;在圖像的識別過程中,低通濾波器的大小設置為7×7,原圖NRSS為0.7654,形狀度量為1.3和2.4時,NRSS分別為0.3712和0.2667。這種層次化的輪廓分析在路標的識別上具有較好的穩健性。
交通圖標;圖像輪廓;計算機視覺;圖像分塊;圖像識別
隨著數字全息技術的不斷發展,計算機視覺應用越來越廣泛,尤其在交通路標的識別過程中具有出色的表現[1]。計算機視覺作為機器視覺的分支,在對交通路標識別的過程中可依據路標顏色空間進行劃分,并結合不同的算法對尺度不變特征進行提取,最終實現對交通路標的有效識別[2-3]。在計算機視覺下,交通路標圖像的采集、壓縮、儲存和傳輸過程中都有可能會對圖像的質量產生影響,從而直接影響識別的有效判斷率[4]。同時,用于成像的CCD圖像傳感器的分別率低、光的衍射、光路的選擇不當等原因導致的采樣的交通路標模糊導致的大量高頻分量丟失的問題[5],在計算機視覺記錄過程中不可避免受限于現實環境。因此,本研究針對交通路標的計算機視覺,采用邊緣特征和輪廓信息對圖像進行分塊處理,提出了一種數字圖像層次輪廓分析的圖像識別技術。
1 層次輪廓技術基礎
1.1 圖像的提取
由于交通路標在大小與形狀上極為相似,機器視覺識別更加關注交通路標的結構信息,對于交通路標圖像的信息提取由其輪廓和邊緣構成[6]。對于交通路標圖像中的某一像素點Pi,j,采用Sobel算子實現梯度變換來提取圖像的輪廓和邊緣信息[7]。則計算像素點的梯度信息為:

其中,|·|表示兩點之間的距離,dxi,j和 dyi,j分別為圖像的水平邊緣和垂直邊沿掩膜算法。
將獲得的交通路標圖像按照素點的梯度信息進行分塊處理:首先,找出交通路標圖像中路標輪廓和邊緣信息最為豐富的N個圖像塊;其次,設置塊間的距離步長為4,將圖像分成12×12的路標圖像小塊,即對稱的圖像塊進行重疊整理,這樣做的目的是為了減少計算機讀取的重復信息,從而避免信息自動分塊損失的細節[8];最后,通過計算每一個子圖像塊的方差來判斷高頻區域的細節信息,即方差愈大信息豐富度愈高。將方差按從大到小的順序排列,提取N個圖像子塊,舍去對稱重復子區域。將這些圖像子塊按照水平方式和垂直方式分別記為{xi,i=1,2…N}和{yi,i=1,2…N},其中 N 的取值對圖像的識別精度有顯著影響,N越大識別精度越高而算法運行速度越小,因此,需要選取合適的圖像劃分數量。通常情況下,運用邊緣輪廓所占圖像的比例來進行取值,即N的取值為2的整數次冪[9],即

1.2 圖像的識別
在圖像邊緣特征的提取與圖像分塊時可能出現厚邊或斷點等情形,導致輪廓圖像的精度不夠或是信息丟失,檢測出的輪廓像素點并不連續[10]。本研究對輪廓圖像的分層識別提出4個層次對圖像進行識別和匹配。
1)圖像密度:計算機視覺識別物體全局特征時,圖像子塊的輪廓長度所包含對象面積的大小,圖像密度表達式如下[11]:

2)形狀度量:將輪廓上的點到輪廓中心的距離函數[12]:

其中,Ci只考慮其數值的大小而忽略其順序。若直接用該序列對交通路標進行匹配,除了要考慮圖像子塊起始點的位置,還要考慮圖像的形變以及子塊重疊區域等情況。結合標準差對輪廓的起伏變化程度進行全局特征描述的衡量。計算方法如下:

3)光滑程度:在圖像輪廓匹配中,除了形狀等幾何特征易于識別外,輪廓的曲率也是圖像的重要特征。但由于數字圖像中輪廓以像素點的形式呈現,表現出不光滑性,其曲率的計算存在一定難度[13]。對于交通路標圖像中的某一像素點Pi,j的曲率計算為:

其中,|·|表示兩點之間的距離。
4)輪廓熵值:交通路標圖像的全局與局部特征相比,全局的結構特征描述的是輪廓中一種基本更為精確結構單元特征,在描述圖像輪廓特征時具有較好的靈活性和更強的適應性。局部的結構特征描述的是待識別物體輪廓上各點的分布情況,用極窗來量化輪廓內容,通過形狀像素點計算輪廓間的匹配度。而信息熵作為衡量了系統的復雜度,通過計算劃分隨機捕獲的圖像子塊出現的期望值,其信息量隨著信息熵的增大而增大[14]。計算輪廓信息熵值Q為:
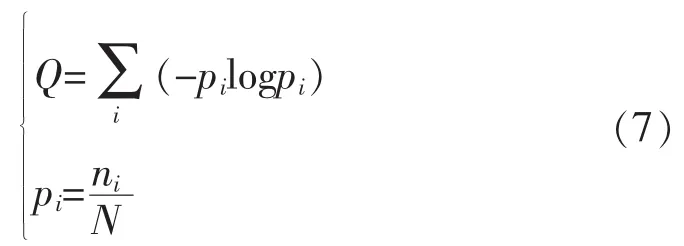
其中,pi為輪廓上點落在第i個窗口中的概率。
2 計算機視覺交通路標識別
為了實現計算機對交通圖標的識別,采用層次輪廓識別算法過程中,首先對二值圖像進行邊緣檢測或邊緣跟蹤得到更準確輪廓圖像,獲得輪廓圖像和得到了連續的輪廓像素點,以便于下面輪廓特征的描述。清晰的交通路標由于包含大量的高頻信息經過低通濾波得到的圖像損失了大量的高頻信息成分,濾波前后圖像差異較大,得到的結構相似度的值較小;交通路標的小分塊由于只丟失少量的高頻信息,經過低通濾波器隨時的高頻成分相對較少,濾波前后的路標差異較小,得到的結構相似度較大。其中,層次輪廓的路標圖像邊緣特征提取和圖像分塊流程,如圖1所示。
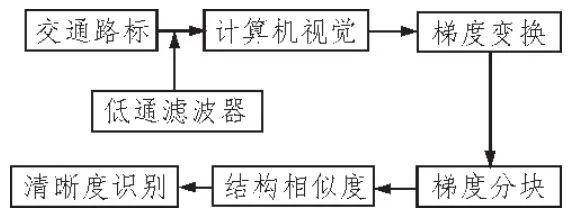
圖1 路標圖像輪廓的提取與分塊的流程
對于交通路標輪廓形狀度量的變化,運用特征描述可以對交通圖標的不同形狀具有很好的區分度,對于常見的路標圖像可以按照圓形、正方形和三角形進行劃分,當輪廓長度相等時,質點距離的標準差分別為0、0.34和1[15]。交通路標主要分類3大類:禁令、警告和指示。每個大類的交通路標都有統一的輪廓類型,例如,禁令類的交通路標為黑色三角形邊框的紅色背景的標示,警告類的交通路標為黑色正方形邊框的黃色背景的標示,指示類的交通路標為白色圓形邊框的藍色背景的標示。這3大類邊框對應圖2中3種不同形狀。不同形狀質心距離標準差如圖2所示。
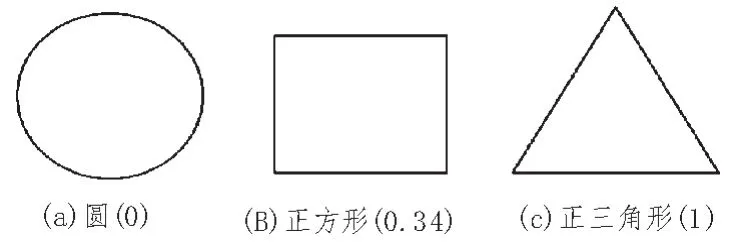
圖2 質心距離標準差
針對計算機視覺下的交通路標提出了能夠識別輪廓特征的4個層次劃分描述:具有全局特征的緊密度D和形狀度量σi,反應局部特征的輪廓光滑程度K(i)以及顯示結構特征的輪廓熵值Q。將這4個層次輪廓特征描述子組成一個結構化的、綜合性很強的圖像輪廓特征 F={D,σi,K(i),Q},用其作為計算機視覺對交通路標圖像的識別和匹配,展現出了較好的穩健性和容錯能力。
3 仿真實驗
本研究實驗的硬件環境為Intel i7-4850HQ處理器(4 核,單核主頻 3.5 GHz),物理內存 4 GB,操作系統為64位Windows7,算法基于Matlab軟件進行編程。數據共收集了300張交通路標圖像進行計算機視覺的算法訓練,并且每張交通路標的圖像采用JPG格式且為1280×800像素,同時考慮到交通道路上周圍環境可能造成的部分遮擋和光照強度的不同引起的交通圖標的采集信息對識別的誤判,本實驗對收集的交通路標圖像進行了仔細的刪選盡可能的減少樣本取樣誤差對計算機視覺識別結果的誤差。
為了驗證本研究提出的層次輪廓計算機視覺對交通路標識別分析的合理性,將通過兩個實驗來驗證:實驗一,利用失真圖像的主觀差異評分DMOS(Difference Mean Opinion Scores)值[16]和無參考結構清晰度 NRSS(No Reference Structure Scores)[17]來對圖像的提取失真差異進行分析;實驗二,利用層次輪廓計算機視覺對圖像進行識別來判斷算法的有效性。
實驗一:300張交通路標圖像分為禁令、警告和指示每大類各100張,使用gblur子文件夾下的圖像進行試驗,實驗時選用同一張交通路標圖像不同模糊程度的失真圖進行對比,結果如表1所示。
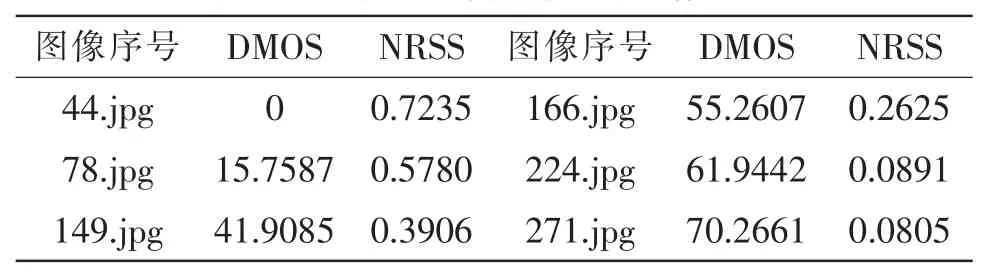
表1 不同程度的模糊失真圖像對比
由表1可知,交通路標圖像隨著其DMOS值的增大,圖像的質量越差。質量較差的圖像在低通濾波器在計算機視覺下的梯度變換圖像的結構相似度值就越大,NRSS的值就會越小。同時,隨著交通路標圖像的清晰度越低,其NRSS值越小,即采用圖像邊緣輪廓提取的方式對交通路標的識別具有可行性。
實驗二:在實驗一對所使用的交通路標圖像清晰度提取的基礎上,利用本研究提出的層次輪廓計算機視覺識別技術對分塊處理后的圖像進行識別。將兩幅計算機視覺下的圖像與失真圖像進行對比:將高斯低通濾波器的大小設置為7×7,路標圖像的形狀度量標準差分別設置為1.3和2.4。不同程度計算機視覺圖像的識別與對別,如圖3所示和表2所示。
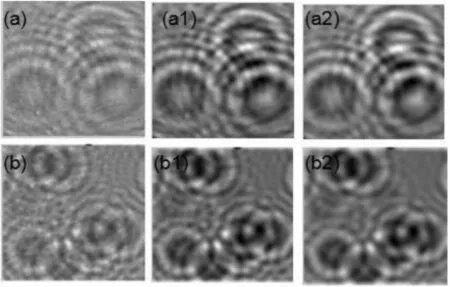
圖3 不同程度計算機視覺圖像的識別
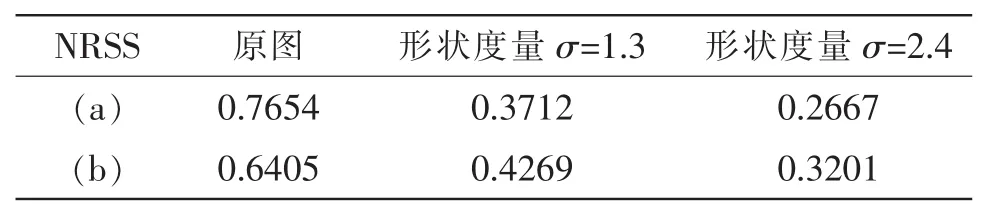
表2 不同程度計算機視覺圖像對別
如圖3所示,形狀度量值越大,交通路標圖像越模糊,即越難以實現識別,如表2所示,交通路標圖像越模糊,經過層次輪廓計算機視覺得分越低。實驗結果表明,本研究提出的層次輪廓計算機視覺識別能夠有效的識別交通圖標信息。通過設置濾波器的大小來獲得不同清晰程度的交通路標圖像作為識別的圖像。
4 結 論
本研究提出了一種基于層次輪廓計算機視覺的交通路標識別,為了提取合適的識別的圖像,采用Sobel算子實現梯度變換來提取圖像的輪廓和邊緣信息,結合信息熵計算圖像信息豐富度并對交通路標圖像進行分塊處理,減少了對稱重疊區域的重復計算。在交通路標的識別過程中,分別構造了圖像密度、形狀度量、光滑程度和輪廓熵值4個層次的圖像輪廓識別。通過實驗仿真表明,對模糊的計算機視覺圖像能夠通過條件濾波器的大小實現數字全息圖像,利用層次輪廓計算機視覺分析可以有效的篩選出全息圖像,提高全息圖像的質量,有效的控制由于失真引起的識別誤判。
[1]劉金龍,薛名芷.機器視覺技術在交通路標識別中的實現方法[J].硅谷,2014(5):46.
[2]吳錦晶,張仁杰,唐春暉.交通路標圖像的分割與識別方法研究[J].光學儀器,2011,33(5):34-41.
[3]吳曉燕.路標圖像識別的禁忌搜索遺傳算法研究[J].計算機工程與設計,2014,35(6):2109-2113.
[4]劉義杰,張湘平,譚霜.基于視覺注意機制的交通路標檢測方法 [J].計算機應用研究,2012,29(10):3960-3963.
[5]楊杰,王直杰,董宗祥.復數Hopfield神經網絡在路牌識別中的應用 [J].微計算機信息,2010,26(22):161-163.
[6]楊佳,黃玉清,陳小寧.基于區域生長的機器人路標識別方法研究 [J].計算機工程與設計,2008,29(13):3410-3412.
[7]趙文達,續志軍,趙建,等.基于梯度直方圖變換增強紅外圖像的細節[J].光學精密工程,2014,22(7):1962-1968.
[8]程鵬,朱美琳,耿華.一種基于梯度Hough變換和SVM的圓檢測算法 [J].計算機與現代化,2013(2):22-26.
[9]毛若羽,陳相寧.改進的HSI空間形態學有噪彩色圖像邊緣檢測[J].計算機應用研究,2013,30(2):635-637.
[10]張桂梅,張松,儲珺.一種新的基于局部輪廓特征的目標檢測方法 [J].自動化學報,2014,40(10):2346-2355.
[11]陳愷,何晨,陳運.等.基于小波變換和相調制圖像密度偽彩色編碼的圖像增強處理[J].天津理工大學學報,2012,28(3):71-75.
[12]賈棋,劉宇,郭禾,等.以度量分段約束為特征的形狀匹配算法 [J].計算機輔助設計與圖形學學報,2014,26(1):65-71.
[13]伍濟鋼,賓鴻贊.用HOUGH變換改進的曲率法識別平面輪廓圖元 [J].圖學學報,2011,32(2):102-106.
[14]吳澤鵬,郭玲玲,朱明超,等.結合圖像信息熵和特征點的圖像配準方法 [J].紅外與激光工程,2013,42(10):2846-2852.
[15]劉罡,李元香.分子動理論的新型反向差分演化算法 [J].小型微型計算機系統,2012,33(1):115-120.
[16]王阿紅,郁梅,彭宗舉,等.一種基于人眼視覺特性的立體圖像質量客觀評價方法 [J].光電工程,2011,38(1):134-141.
[17]陳浩,陳健,葉輕,等.基于相鄰像素差與NRSS的自動對焦算法[J].計算機工程,2015,41(9):261-265.
Traffic road sign recognition based on computer vision outline level
ZHAO Duo
(Departments of Information Engineering,Shanxi Vocational and Technical College,Xi'an 710018,China)
For the complexity of problems and instability existing computer vision,traffic signs recognition,through the use of image recognition technology outline presented by the global to the local feature characteristic feature of multi-level structure and then outline recognition,the recognition process of traffic signs the were constructed image density,shape measurement,smoothness and contour entropy four levels of image contours,combined with Sobel operator and traffic signs image information entropy were extracted and processed block.The simulation results show that:in the extraction process of an image,the image with the increasing traffic signs DMOS its value,the worse the image quality,the lower the resolution,the smaller the NRSS value; in the recognition process of the image,the low when the size of the set-pass filter is 7×7,picture NRSS to 0.7654,shape of metric is 1.3 and 2.4,NRSS 0.3712 and 0.2667 respectively.This level of profiling has better robustness in recognition of road signs.
traffic icon;image contours; computer vision; image block; image recognition
TN949.6
:A
:1674-6236(2017)14-0123-04
2016-05-07稿件編號:201605063
趙 鐸(1983—),男,陜西西安人,講師。研究方向:計算機領域。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
趣味(數學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
消費導刊(2017年20期)2018-01-03 06:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
