集成式電子液壓制動系統防抱死制動控制*
2017-08-09 02:30:18劉天洋余卓平王婧佳
汽車工程 2017年7期
關鍵詞:系統
劉天洋,余卓平,熊 璐,韓 偉,王婧佳
(同濟大學汽車學院,上海 201804)
?
集成式電子液壓制動系統防抱死制動控制*
劉天洋,余卓平,熊 璐,韓 偉,王婧佳
(同濟大學汽車學院,上海 201804)
基于一種新型集成式電子液壓制動系統,利用優化后液壓控制單元中僅有的4個電磁閥開發了兩種防抱死制動系統的控制策略:安全優先式控制和主缸定頻調壓式控制。搭建了硬件在環仿真平臺,利用集成式電子液壓制動系統硬件,以LabVIEW作為通信平臺,進行MATLAB/Simulink和CarSim的聯合仿真。結果表明,所設計的兩種防抱死制動系統均可滿足防抱死制動的功能要求。其中主缸定頻調壓式控制在縮短制動距離、與電子穩定系統結合方面均優于安全優先式控制。
集成式電子液壓制動系統;防抱死制動系統;硬件在環仿真
前言
隨著新能源汽車,尤其是電動汽車的推廣與普及和車載傳感器與控制器技術的發展與完善,汽車對于制動系統的要求也不同以往——為滿足電動汽車最大化回收制動能量的需求,除將電源反接由電機拖滯制動提供一部分制動力矩外,還需要另外一種制動力可調節的系統來滿足剩余的制動力需求;此外,對于汽車智能化來講,若能使用電子信號精確控制制動系統作用,即可為自動緊急制動和自適應巡航控制等功能提供更多可能性。因此,電子液壓制動系統(electro-hydraulic braking system, EHB)便應運而生,并逐漸受到汽車零部件供應商和科研院所的重視。
不同于目前應用較多的泵式電子液壓制動系統(pump-electro-hydraulic braking system, P-EHB),集成式電子液壓制動系統(integrated-electro-hydraulic braking system, I-EHB)的主動建壓裝置與制動主缸集成在一起,電動機的旋轉運動通過減速機構直接轉化為驅動主缸建壓的直線運動,減小了系統的體積、質量,也節省了成本[1]。例如大陸公司在2013年推出的I-EHB系統MK C1,不僅實現了制動踏板與制動主缸的完全解耦,且擁有體積和質量優勢[2]。
防抱死制動系統(anti-lock braking system, ABS)是汽車縱向動力學控制的研究內容之一。該系統可阻止車輪在制動力矩較大時出現抱死現象,同時現代的ABS系統還具有將車輪在制動時的滑移率保持在最優值附近的功能。所以,在ABS系統起作用時,駕駛員不會由于前輪抱死而失去對車輛轉向的控制,而且汽車制動距離會比車輪抱死時小[3]。
最常見的ABS控制策略是邏輯門限值法[4]。這種方法基于輪速傳感器檢測到的車輪加減速度值與預設的控制閥值進行比較,根據預設算法,控制增減壓電磁閥的開閉,從而控制制動輪缸增壓、減壓或是保壓,使車輪免于抱死[5]。還有一些學者考慮到路面附著系數、車輛制動初速度等因素,進一步探究了基于邏輯的ABS控制策略[6]。
近年來,對于ABS控制策略的研究仍然是一個活躍領域,很多學者嘗試并提出了基于車輪滑移率的防抱死控制方法:比如PID控制[7]、滑膜變結構控制[8]和神經網絡與模糊控制[9-10]等。
文獻[11]中針對前期提出了的一種I-EHB系統,經過硬件在環仿真試驗,驗證了該系統通過電機的正反轉可輕松地增高或降低系統的液壓力,響應速度快,控制精確;且目前該方案已通過自適應PID、滑模變結構和摩擦顫振補償等方法對主缸液壓力進行精確控制,誤差在2%以內。因此進一步對結構進行優化,重新設計液壓控制單元(hydraulic control unit, HCU),將防抱死制動系統原本需要的8個電磁閥縮減至4個,每個制動輪缸對應一個電磁閥,實現對輪缸液壓力的控制。
本文中基于優化后只有4個電磁閥的新型HCU,提出了兩種ABS控制策略:安全優先式控制和主缸定頻調壓式控制,并在硬件在環仿真試驗臺上驗證了兩種控制策略的可行性,最后對試驗結果進行了分析對比,為未來改進提出了建議。
1 I-EHB系統結構及工作原理
本文中所采用的I-EHB系統的方案簡圖如圖1所示。

圖1 I-EHB系統方案簡圖
當系統正常工作時,駕駛員踩下制動踏板7,踏板位移傳感器8將踏板位移轉化為電信號輸入電子控制單元(ECU)1,由ECU計算得出駕駛員所需制動力矩。ECU輸出信號傳送到DC/AC,控制電機4通電運轉,經蝸輪蝸桿減速機構5減速后轉變為推動主缸推桿的直線運動,從而產生制動液壓力。與此同時,電磁閥29上電關閉,制動踏板的位移推動次級主缸9中的制動液進入踏板感覺模擬器14模擬踏板感覺;電磁閥28上電開啟,通過解耦缸11實現制動踏板7與制動主缸12運動解耦,由電機控制制動主缸產生的液壓力。
當故障診斷系統診斷出故障信息,電控單元立刻令整個系統斷電。電磁閥29和27斷電后,次級主缸內的制動液在制動踏板踩下時直接回流到儲液罐;電磁閥28斷電后,切斷了解耦缸與儲液罐的液壓通路。當駕駛員繼續踩下制動踏板,次級主缸活塞會與推桿接觸,加上解耦缸內制動液的剛性,制動踏板的運動直接傳遞到主缸推桿上實現建壓制動,由傳統液壓制動方式實現應急制動功能。
I-EHB系統實物圖如圖2所示。

圖2 I-EHB系統實物圖
在搭建I-EHB系統樣機時主要考慮了電機選型、減速機構設計和一體化殼體設計等方面,其中以電機選型最為關鍵——電機是該系統的主動力源,其性能的優劣直接關系到制動響應和效果。本系統選用了日本Nidec公司額定轉矩為5.5N·m的電機,其控制精度高、動態性好、體積小,但成本較高,控制復雜。在減速機構方面,本系統采用蝸輪蝸桿減速機構,并通過有限元仿真對結構進行了改進,減少了模數并進行大變位,從而降低了體積和質量。液壓力傳感器選用上海奇士樂公司的Keller PA-21Y型傳感器。
2 ABS控制器設計
作為一個被控對象,I-EHB系統非線性較強,并沒有較為合適的線性系統可將其近似擬合等效,從而制定相應的控制算法。同時由于I-EHB系統涉及電氣、機械、液壓,其復雜性決定了難以對其建立準確的系統模型應用非線性控制方法[1]。因此,對I-EHB系統使用基于模型的控制方法實現輪缸液壓力精確控制難度較大。在設計ABS控制器時,首先考慮應用較廣泛的邏輯門限值法。
車輛在濕滑路面或發生緊急情況制動時,車輪容易因制動力超過輪胎與地面的摩擦力而抱死:若后輪發生抱死,車輛容易發生側滑失控;若前輪發生抱死,會導致車輛喪失轉向能力,從而難以改變行駛方向——這兩種情況均極為危險。本文中基于所提出的I-EHB系統及其特點,設計了兩種ABS控制器,防止上述抱死情況發生。第一種是安全優先式控制算法;第二種是主缸定頻調壓式控制算法。
2.1 安全優先式控制
車輛的制動力取決于制動器的摩擦力,還受到地面附著系數的制約。當制動器產生的制動力突破輪胎與地面摩擦力的極值時,輪胎將發生抱死。因此為了消除車輪抱死傾向,首要考慮的就是將制動輪缸內的液壓力降低。
基于上述分析,安全優先式控制邏輯設計以車輪制動力降低為首要考慮因素——即當4個車輪中任何一個車輪需要降低其制動輪缸的液壓力時,ECU都會向電機控制器發送降低電機力矩的指令,具體控制邏輯如圖3所示。

圖3 安全優先式ABS控制邏輯
具體情況處理如下。
(1) 4個輪缸的壓力都需要降低時,車輛防抱死系統進行減壓處理:控制電機的輸出轉矩下降,主缸壓力降低,同時4個電磁閥保持開啟狀態。
(2) 4個輪缸的壓力都需要增高時,車輛防抱死系統進行增壓處理:控制電機的輸出轉矩上升,主缸壓力升高,同時4個電磁閥保持開啟狀態。
(3) 4個輪缸的壓力都需要保持不變時,車輛防抱死系統進行保壓處理,4個電磁閥保持關閉狀態。
(4) 任意一個輪缸液壓力需要降低,車輛防抱死系統進行減壓處理:控制電機的輸出轉矩下降,主缸壓力降低。需要減壓的車輪對應電磁閥打開,其它需要升壓或保壓的輪缸所對應的電磁閥關閉。因此,有抱死傾向的車輪制動力矩降低,其它車輪的制動力不變。
(5) 某一個或幾個輪缸液壓力需要增加,其余輪缸需要保壓時,車輛防抱死系統進行增壓處理:控制電機的輸出轉矩上升,主缸壓力升高。需要升壓的輪缸對應的電磁閥打開,其它需要保壓的輪缸對應的電磁閥關閉。
(6) 當某一個或幾個輪缸的制動壓力目標值變化趨勢和制動主缸的變化趨勢不一致時,只需關閉該輪缸對應的電磁閥。
輪缸液壓力期望值計算根據邏輯門限值法演化而來。邏輯門限值法較為簡單,且控制響應速度快,測量成本低,目前比較成熟的商用ABS產品大多采用這種方法。
車輛制動時,如果整車的行駛速度高于各車輪的線速度時,輪胎和路面之間將產生滑移,滑移的程度用滑移率表示。
式中:λ為滑移率;vx為車輛速度;ω為車輪角速度;r為車輪半徑。
為每個車輪的滑移率設置兩個門限值A1和A2。當車輪滑移率超過門限值A1時表明該輪缸需要減壓;當車輪滑移率小于門限值A2時表明該輪缸需要增壓。同時監測車輛速度,當車速小于5m/s時,無論滑移率的值為多少,ABS系統均停止作用。
根據安全優先式ABS控制邏輯,電機有兩種狀態:升高轉矩和降低轉矩。當電機需要升高轉矩時,增高的轉矩值取決于系統增壓時主缸液壓力的期望值;同理,當電機需要降低轉矩時,降低的轉矩值取決于系統減壓時主缸液壓力的期望值。而主缸液壓力的期望值則通過試驗得到,不同附著系數路面下系統增壓和減壓時主缸液壓力的期望值不同。
主缸液壓力控制采用課題組已有研究成果,利用分段抗積分飽和PID實現。PID的參數整定通過田口方法在大量試驗基礎上得到,誤差控制在2%以內。
2.2 主缸定頻調壓式控制
上文提到的安全優先式ABS控制策略具有邏輯簡單、充分利用主缸液壓力精確控制的優點,但該控制策略偏于保守,以避免任何一個車輪抱死為首要考慮因素——只要4個車輪中任意一個車輪需要降低其制動輪缸的液壓力,即使其他輪缸需要增壓,電機仍執行降低轉矩的命令,無法兼顧需要增壓的輪缸。為改善這一點,提高制動效率,提出針對I-EHB系統的主缸定頻調壓式控制策略。
這種控制策略需要主缸活塞不停抖動,從而使主缸液壓力不停地在某一區間內波動。當某一輪缸需要減壓,且此時該輪缸液壓力大于主缸液壓力,則與該輪缸對應的電磁閥打開,否則關閉;同理,當某一輪缸需要增壓,且此時該輪缸液壓力小于主缸液壓力,則與該輪缸對應的電磁閥打開,否則關閉。任一車輪具體控制邏輯如圖4所示,其余車輪同理。
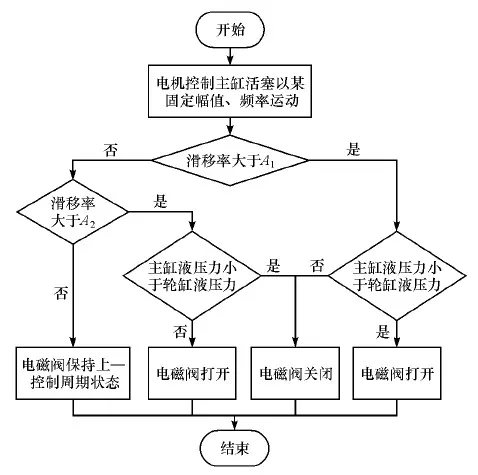
圖4 主缸定頻調壓式ABS控制邏輯
I-EHB系統的主缸定頻調壓式控制仍基于邏輯門限值法得到每個車輪輪缸液壓力的期望值。圖4中的A1和A2即為上文中提到的滑移率控制中的兩個門限值。
由于實際中車輛在不同附著系數路面行駛,對于制動力的需求有很大區別——路面附著系數較大時,車輪與路面的摩擦力極值較大,從而車輪恰好抱死時的制動力較大,反之亦然。由于在高附著系數路面和在低附著系數路面行駛時需要提供給輪缸的液壓力范圍不同,所以在本系統中主缸活塞抖動運動產生的主缸液壓力范圍在高附和低附兩種路面下也應不同。經過嘗試,利用正弦信號作為電機轉矩命令的輸入信號效果最好。而且為更好地調節電機轉矩變化范圍,從而更好地調節主缸液壓力變化范圍,用兩個正弦信號疊加作為電機轉矩命令的輸入,通過調節兩個正弦信號的周期、幅值和相位控制電機輸出不同轉矩。具體電機轉矩命令模塊設計示意圖如圖5所示。

圖5 電機轉矩命令模塊設計示意圖
3 硬件在環仿真試驗
為驗證提出的兩種ABS控制策略的有效性,設計了硬件在環仿真試驗,計算并輸出主缸和輪缸液壓力、車輪滑移率、車速與輪速和制動距離等關鍵參數,用于對比和評估兩種控制策略的控制效果。
3.1 硬件在環仿真試驗平臺
硬件在環仿真試驗平臺一般由4個部分組成:實時控制平臺、硬件實物平臺、軟件仿真模型和信號處理系統。本硬件在環仿真試驗平臺實物圖如圖6所示。
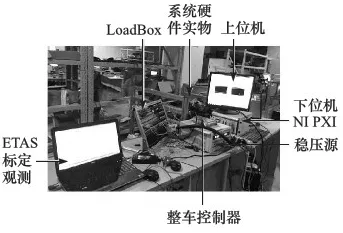
圖6 I-EHB硬件在環仿真試驗平臺
在實時控制平臺方面,上位機采用了DELL的一臺工作站,通過以太網與下位機連接,主要作用是在Windows環境下通過整車模型實時仿真軟件設置車輛模型,并將該模型下載到下位機中。下位機選用美國國家儀器公司的NI PXI 8602型號的機箱。
硬件實物平臺主要是原創的I-EHB系統所包含的硬件,包括整車控制器、電機、電機控制器、減速機構、制動主缸、液壓控制單元(HCU)、制動卡鉗(制動輪缸)、液壓管路與線束和主缸輪缸的液壓力傳感器等,還包括穩壓電源和配合整車控制器使用的控制板LoadBox。LoadBox幫助將控制算法燒錄到整車控制器中,并接收來自CAN總線上例如制動主缸和4個制動輪缸的液壓力等信號,相當于整車控制器與各個執行部件和整車模型之間的中轉站。
在軟件方面,整車模型采用CarSim軟件搭建,并使用其Real Time模塊。選取軟件中某款電動汽車,關鍵參數如表1所示。整車模型的輸入信號是4個輪缸液壓力信號,輸出信號則為車速、4個車輪輪速和制動距離。ABS控制算法建模采用MATLAB/Simulink平臺,其中控制模型主要使用了邏輯判斷模塊。結合CarSim軟件預留給MATLAB/Simulink的接口,可方便地設置好兩款軟件的聯合仿真。另外采用LabVIEW來實現處理實際硬件系統與實時仿真平臺和上、下位機之間的通信。
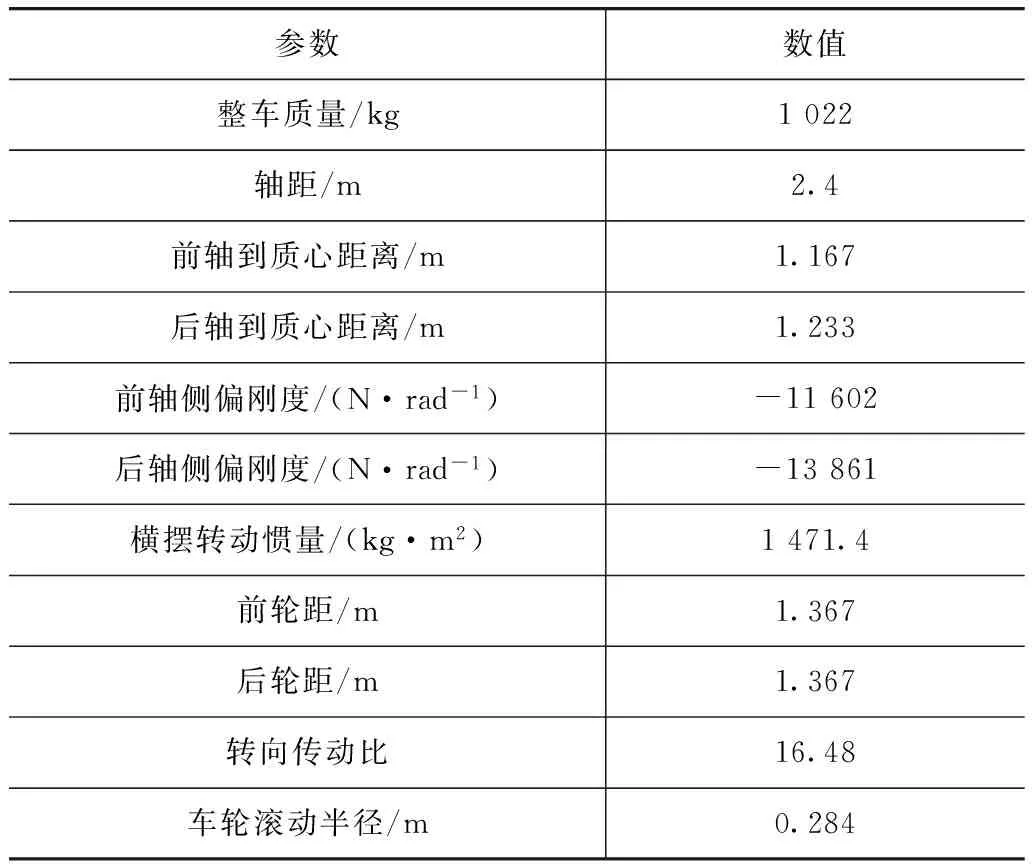
表1 整車模型關鍵參數表
信號處理系統將上述所有部件連接起來,保證所有部件供電穩定,部件之間通信可靠且相互之間不受干擾。這里使用CAN通信實現這一功能。實時仿真平臺的上位機和下位機之間通過網線和路由器相連,使用TCP/IP協議。
整個硬件在環仿真平臺的工作原理如圖7所示。
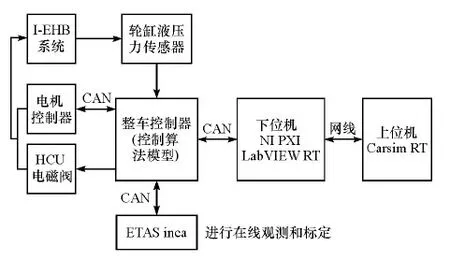
圖7 硬件在環仿真平臺工作原理圖
3.2 試驗結果與分析
基于上述硬件在環仿真試驗平臺,分別進行了在高附著和低附著路面上無ABS控制、安全優先式控制和主缸定頻調壓式控制的試驗,其中設置低附路面附著系數為0.2,初始車速為60km/h;高附路面附著系數為0.8,初始車速為100km/h。試驗結果與分析如下。特別說明的是,由于沒有對開路面,左右車輪附著系數相等,所以為使圖形簡潔明了、線形變化趨勢清晰易讀,以下試驗結果展示中均只畫出右前輪(FR)和左后輪(RL)在制動過程中滑移率超過限定值后的相關數據。
3.2.1 無ABS控制試驗結果
在未加入ABS控制時,在低附著路面上,當主缸液壓力達到3MPa時4個車輪就會發生抱死;在高附路面上,當主缸液壓力達到120MPa時4個車輪就會發生抱死。試驗結果如圖8和圖9所示。

圖8 無ABS控制低附路面試驗結果

圖9 無ABS控制高附路面試驗結果
由圖8可見,從車輛施加制動開始4個車輪均發生抱死,最終制動距離為71.14m。
由圖9可見,從車輛施加制動開始4個車輪均發生抱死,最終制動距離為49.61m。
3.2.2 安全優先式ABS試驗結果與分析
施加了安全優先式ABS控制之后,在不同路面條件下主缸與輪缸液壓力、滑移率和車速與輪速如圖10和圖11所示。
由圖10可見,從車輛施加制動開始車輪均未發生抱死。從試驗數據得到最終制動距離為69.37m。
由圖11可見,從車輛施加制動開始車輪均未發生抱死。從試驗數據得到最終制動距離為58.33m。
由以上試驗結果可以看到,ABS安全優先式控制在低附和高附兩種路面下均可實現防抱死制動。低附路面下添加控制后制動距離縮短了2.49%;高附路面下添加控制后制動距離增加了17.57%。
之所以后者會出現制動距離增加的現象是因為ABS安全優先式控制在起作用時會不斷給電機施加階躍信號,電磁閥動作輔助控制。尤其在高附工況下,施加給電機的階躍信號幅值較大且頻率較高,而搭建的硬件在環仿真試驗平臺所采用的電機原本是用于車輛電動助力轉向系統,正常情況下不會處理階躍信號,響應速度和轉矩范圍均十分有限。因此ABS安全優先式策略在硬件在環仿真試驗中常常遇到電機自保護不再工作的情況,高附路面下尤為嚴重,導致高附路面下盡管實現了防抱死功能,但是制動距離比無控制時要長。
3.2.3 主缸定頻調壓式ABS試驗結果與分析
施加了主缸定頻調壓式ABS控制之后,在不同路面條件下主缸與輪缸液壓力、滑移率和車速與輪速如圖12和圖13所示。
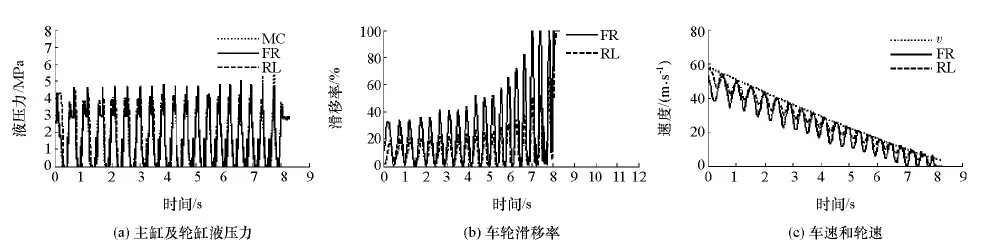
圖10 安全優先式ABS低附路面試驗結果
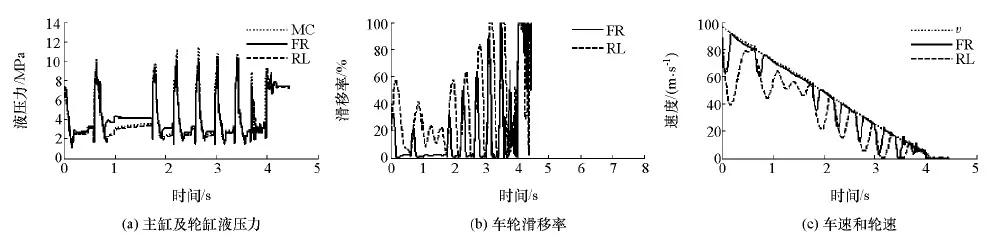
圖11 安全優先式ABS高附路面試驗結果
圖12 主缸定頻調壓式ABS低附路面試驗結果

圖13 主缸定頻調壓式ABS高附路面試驗結果
由圖12可見,從車輛施加制動開始車輪均未發生抱死。從試驗數據得到最終制動距離為66.73m。
由圖13可見,從車輛施加制動開始車輪均未發生抱死。從試驗數據得到最終制動距離為44.92m。
由以上試驗結果可以看出,主缸定頻調壓式ABS控制在低附路面下比無控制的制動距離縮短了6.20%;在高附路面下比無控制的制動距離縮短了9.45%。主缸定頻調壓式ABS控制在低附和高附兩種路面下均可以實現防抱死,且制動距離均有所縮短。
4 結論
本文中針對集成式電子液壓制動系統(I-EHB)和精簡后僅保留4個電磁閥的液壓控制單元(HCU),提出并通過硬件在環仿真試驗驗證了兩種制動防抱死系統(ABS)控制——安全優先式ABS和主缸定頻調壓式ABS。從仿真結果來看,可以總結歸納如下結論:
(1) 兩種ABS均可有效避免制動過程中由于制動力過大造成的車輪抱死現象,從而保證駕駛員對于車輛的有效控制;
(2) 主缸定頻調壓式ABS在防抱死功能和減少制動距離方面均優于安全優先式ABS,這主要是因為前者作用時電機保持以一定幅值和頻率做正弦運動,主要靠4個電磁閥動作實現防抱死功能,對電機性能要求較后者低,因而不會出現電機自保護導致的失效,在以后的研究中,如果可以提高電機及電機控制器的性能,安全優先式ABS的表現會有所提升;
(3) 基于HCU內僅有4個電磁閥的情況,從將ABS功能與電子穩定程序(ESC)結合的角度考慮,主缸定頻調壓式控制同樣優于安全優先式控制——安全優先式控制無法實現同時對每個制動輪缸液壓力的精確控制,而主缸定頻調壓式卻可以實現。
[1] 余卓平,徐松云,熊璐,等.集成式電子液壓制動系統魯棒性液壓力控制[J].機械工程學報,2015,51(16):22-28.
[2] FEIGEL H J. Integrated brake system without compromises in functionality[J]. ATZ Worldwide,2012,114(7-8):46-50.
[3] RAJAMANI R. Vehicle dynamics and control[M]. New York: Springer Science & Business Media,2011:126.
[4] BAUER H, CYPRA A, BEER A, et al. Bosch automotive handbook[J]. Robert Bosch Gmbh,1996,4.
[5] KIENCKE U, NIELSEN L. Automotive control systems: for engine, driveline, and vehicle[J]. Measurement Science and Technology,2000,11:1828-1830.
[6] GUNTUR R R, OUWERKERK H. Adaptive brake control system[J]. Proceedings of the Institution of Mechanical Engineers,1972,186(1):855-880.
[7] JIANG F, GAO Z. An application of nonlinear PID control to a class of truck ABS problems[C]. IEEE Conference on Decision and Control. IEEE; 1998,2001,1:516-521.
[8] 李開春,朱偉興.光滑滑模控制在汽車防抱死制動系統中的應用[J].微計算機信息,2006,22(26):242-244.
[9] MAUER G F. A fuzzy logic controller for an ABS braking system[J]. IEEE Transactions on Fuzzy Systems,1995,3(4):381-388.
[10] 郭孔輝,王會義.模糊控制方法在汽車防抱制動系統中的應用[J].汽車技術,2000(3):7-10.
[11] 熊璐,徐松云,余卓平.基于顫振補償的電子液壓制動系統液壓力優化控制[J].機械工程學報,2016,52(12):100-106.
Anti-lock Braking Control for Integrated Electro-hydraulic Braking System
Liu Tianyang, Yu Zhuoping, Xiong Lu, Han Wei & Wang Jingjia
SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804
Two control strategies for anti-lock braking system (ABS), safety preference control and master cylinder constant-frequency pressure regulation control, are developed based on a novel integrated electro-hydraulic braking system (I-EHB) and utilizing four solenoid valves in optimized hydraulic control unit. A hardware-in-the-loop simulation platform is constructed and utilizing I-EHB hardware with LabVIEW as communication platform, a co-simulation with MATLAB/Simulink and CarSimand is conducted. The results show that two ABS designed both meet its functional requirements, in which master cylinder constant-frequency pressure regulation control is superior to safety preference control in shortening braking distance and combination with electronic stability control.
integrated electro-hydraulic braking system; ABS; hardware-in-the-loop simulation
10.19562/j.chinasae.qcgc.2017.07.007
*國家自然科學基金(51475333)資助。
熊璐,教授,E-mail:xionglu.gm@gmail.com。
原稿收到日期為2016年8月22日,修改稿收到日期為2016年9月22日。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
