基于形態(tài)學的非均勻光照圖像二值化并行方法
2017-08-12 12:22:06張秋菊
計算機應用與軟件 2017年8期
關(guān)鍵詞:模型
從 飛 張秋菊
(江南大學機械工程學院 江蘇 無錫 214122) (江蘇省食品先進制造裝備技術(shù)重點實驗室 江蘇 無錫 214122)
?
基于形態(tài)學的非均勻光照圖像二值化并行方法
從 飛 張秋菊
(江南大學機械工程學院 江蘇 無錫 214122) (江蘇省食品先進制造裝備技術(shù)重點實驗室 江蘇 無錫 214122)
在傳統(tǒng)工業(yè)場合,尤其在大面積視野下的視覺拍攝經(jīng)常會出現(xiàn)所得圖像光照不均勻的問題,這給圖像二值化分割以及對后續(xù)處理帶來困難。非均勻光照圖像處理通常采用局部閾值分割法,然而經(jīng)典的局部閾值分割法通常會具備噪聲大、處理時間長等弊端。針對這些弊端,提出利用數(shù)學形態(tài)學理論,采用改進的Sauvola算法對非均勻光照圖像進行二值化研究并對其并行優(yōu)化。通過對工業(yè)場合下采集的卡片圖像進行實驗驗證,結(jié)果表明,所述方法不僅可以對噪聲進行有效地抑制,得到較好的識別效果,而且圖像處理時間也大大縮短。
Sauvola算法 非均勻光照 二值化 形態(tài)學 并行優(yōu)化
0 引 言
圖像二值化是圖像處理中非常重要的環(huán)節(jié),圖像二值化的優(yōu)劣關(guān)系到后續(xù)處理的精確性。對于光照均勻的圖片,應用經(jīng)典的全局閾值方法就能取得較好的效果[1-2]。如:直方圖雙峰閾值法;最大類間方差法(大津法)等。然而在傳統(tǒng)工業(yè)場合中,尤其是對具備反光特性物體表面的拍攝或者是在大面積視野視覺拍攝下,相機所拍攝圖像為非均勻光照的居多。針對此類圖像,采用經(jīng)典的全局閾值法處理所得到的效果較差,由于是單一閾值,很多目標信息將被淹沒為背景,無法滿足實驗預處理及后續(xù)操作要求。
針對非均勻光照圖像的處理,目前處理方法概括下來大致分為三種[3-5]:(1) 對圖片根據(jù)光照情況進行分塊處理,再對每一小塊分別取閾值;(2) 采用灰度補償?shù)确椒▽Ρ尘肮庹兆鼍鶆蛱幚恚儆萌珠撝捣指睿?3) 對圖像每一個像素點逐點根據(jù)其領(lǐng)域特性設(shè)定該點閾值, 即局部閾值法處理。第一種方法由于分塊處理,其結(jié)果會使得圖片每塊處理的邊界很明顯,尤其是光照分塊不明顯的圖片,缺乏整體性。第二種方法很難對背景光照進行很好的估計,對于目標與背景相差不大的目標分割效果較差。因此對于非均勻光照圖像而言,通常采用局部閾值法得到的效果良好。目前比較典型的局部閾值分割算法[6-7]有Niblack算法、Bernsen算法。相比而言,兩種算法處理出的效果均會帶來很多噪音干擾,Niblack算法對于復雜圖像的分割效果較Bernsen算法優(yōu)越很多,但其處理時間則相對較慢。2000年Sauvola等[8]在Niblack模型基礎(chǔ)上加以改善,提出了Sauvola算法。該算法對圖像處理所造成的噪聲進行了極大的抑制,但卻并不能改善處理時間較長的問題。在工業(yè)場合中,圖像處理的時間長短極大地影響著工業(yè)生產(chǎn)的效率。本文將針對噪聲大、時間長這些弊端,提出基于形態(tài)學的改進的Sauvola算法對非均勻光照圖像進行二值化研究并在此基礎(chǔ)上對算法模型進行并行優(yōu)化,算法通過實驗驗證。
1 改進的Sauvola算法模型
1.1 經(jīng)典局部閾值法分析
經(jīng)典的局部閾值分割法通常是對每個像素點根據(jù)領(lǐng)域像素灰度值進行逐點設(shè)定,其算法通式可以定義為:
T(i,j)=T(N(i,j),f(i,j))
(1)
其中N(i,j)為局部領(lǐng)域特性,常見的領(lǐng)域特性N(i,j)則包括所定區(qū)域的均值、方差、標準差等。Niblack算法所應用到的領(lǐng)域特性主要是均值和標準差,其算法模型為:
T(x,y)=E(x,y)+k×s(x,y)
(2)
其中k為修正系數(shù),該算法的核心則是對區(qū)域大小ω及k值的選取,通常k取經(jīng)驗值為0.2。Berson算法所使用的領(lǐng)域特性則是所選區(qū)域的最大最小灰度值,其算法模型如下:
T(x,y)=(Imax+Imin)/2
(3)
單從兩種算法模型比較而言,Niblack算法中使用了均值與標準差的領(lǐng)域特性,這使得每一像素點閾值的選取受該區(qū)域極端值的影響較小。但由于引入了標準差,每一個像素點閾值都將進行平方加開方的運算,這使得運算量成倍的增長。Berson算法以最大最小灰度值取代了均值與標準差,避免了過多的計算量,算法速度有了極大的改善。但所帶來的像素點閾值受極端值影響較大的缺陷則無法避免,這也是Berson算法分割效果不盡如人意的重要原因。從算法處理效果來看,Niblack算法對圖像灰度變化較為敏感,且過分依賴k值的選取,無論k如何取值,算法都不可避免引入大量噪聲。Berson算法在處理背景區(qū)域時會產(chǎn)生大量的偽影,尤其在強光分割區(qū)域,幾乎很難辨識出任何有用信息,且該算法處理時間與窗口值數(shù)量密切相關(guān),窗口數(shù)量增加,算法時間也大大延長。
Sauvola算法是在Niblack算法基礎(chǔ)上做了改進。其同樣使用了均值和標準差作為領(lǐng)域特性,只是在Niblack算法模型里增添了新的參數(shù)R,算法模型如下:
(4)
R是標準偏差的最大值,通常直接取值128,參數(shù)R的引入不僅很好地改善了背景噪聲的問題,也同時解決了Niblack算法分割效果嚴重依賴參數(shù)k的問題。但同樣此算法中標準差的領(lǐng)域特性并不能在處理時間上有所改善,而且從該算法處理效果來看,噪聲干擾也存在進一步改善的空間。
1.2 改進的Sauvola算法
針對Sauvola算法依舊不能改善處理時間的問題,本文從領(lǐng)域特性入手,在Sauvola算法模型上引入局部均值偏差δ(x,y)的概念,其定義為:
δ(x,y)=|f(x,y)-E(x,y)|
(5)
局部均值偏差δ(x,y)表示當前點像素的灰度值與其所在局部區(qū)域均值的差值,同局部方差一樣,可隨著背景變化而變化,能較好地反映出選定像素的領(lǐng)域特性。以局部均值偏差δ(x,y)替換Sauvola算法模型中的標準差s(x,y),極大地減小了標準差中二次方加開方運算所帶來的計算量。因此在有效反映像素點局部特性的同時大大縮短了算法處理時間。基于Sauvola算法模型,本文算法建立改進的Sauvola算法模型如下:
(6)
與Sauvola算法類似,式(6)中的R通常取128,k取值范圍(0,1)。該算法延續(xù)了Sauvola算法模型,多次實驗分析,模型中對局部均值偏差δ(x,y)采取開方運算會對噪聲點進行更好的抑制作用,且增強了目標像素的自適應性。
1.3 算法模型并行優(yōu)化
并行計算是指同時使用多種計算資源解決計算問題的過程,其主要是用于提高復雜或者龐大數(shù)據(jù)的計算速度。在傳統(tǒng)圖像處理中用到的大多都是串行計算,而串行計算是指在單個中央處理單元上執(zhí)行軟件寫操作,CPU解決問題都是通過逐個調(diào)取一系列指令,且其中僅有一種指令可被及時或隨時使用。并行算法則是采用多臺處理機聯(lián)合求解問題,其大致的執(zhí)行過程是將給定的計算問題首先分解成若干個盡量相互獨立的子問題。然后將這些子問題分給多臺處理機同時求解,通常應用在具備龐大計算量的模型里進行算法加速。
本文所改進的局部閾值算法模型中需遍歷圖像的每一個像素點,即使以局部均值偏差替代標準差,計算量也尤為龐大。所幸,圖像的每個像素點都是孤立的,這給算法模型的并行優(yōu)化提供先決條件。根據(jù)計算機的多核處理系統(tǒng)選擇多個處理機對算法數(shù)據(jù)同時進行并行分布式計算,大大增強了算法模型的實時性。
2 形態(tài)學濾波器設(shè)計
為了進一步改善對局部閾值法處理圖像所引起噪聲的抑制作用,本文在改進算法模型的基礎(chǔ)上引入數(shù)學形態(tài)學濾波器。形態(tài)學濾波器[9-11]是從數(shù)學形態(tài)學發(fā)展起來的一種非線性濾波器,具有并行快速實現(xiàn)的特點,在圖像處理中應用廣泛。尤其在噪聲抑制、邊緣提取、目標檢測等方面都具備良好的處理效果。因此將形態(tài)學與局部閾值分割算法的結(jié)合,在不會增加處理時間的基礎(chǔ)上會進一步消除噪聲對目標區(qū)域的干擾。形態(tài)濾波器是基于圖像的幾何結(jié)構(gòu)特性,利用預先定義的結(jié)構(gòu)元素(相當于濾波窗)對信號進行匹配或局部修正,從而達到抑制噪聲、提取信號的目的。其基本思想如圖1所示。

圖1 形態(tài)學濾波思想
2.1 形態(tài)學運算組合
圖像的膨脹和腐蝕被定義為兩種基本的形態(tài)學運算。形態(tài)學的開運算和閉運算是兩種基本形態(tài)學的結(jié)合。開運算實質(zhì)是先對圖像進行腐蝕,然后膨脹其結(jié)果,設(shè)A為輸入圖像,B為結(jié)構(gòu)元素,A被B的形態(tài)學開運算記為A°B[12],定義如下:
A°B=(A!B)⊕B=∪{(B)z|(B)z?A}
(7)
式(7)可以簡單理解為B在A內(nèi)完全匹配的平移的并集。形態(tài)學的閉運算A·B則與開運算相反,是先膨脹再腐蝕的結(jié)果:
A·B=(A⊕B)!B
(8)
在圖像處理中,開運算在一定程度上可以起到補償不均勻的背景亮度的作用,可以去除比結(jié)構(gòu)元素更小的明亮細節(jié)。相反,閉運算可以去除比結(jié)構(gòu)元素更小的暗色細節(jié),因此當創(chuàng)建完一個合適的結(jié)構(gòu)元素后,將兩者進行結(jié)合形成開-閉濾波器(A°B·B)可以得到去除噪聲平滑圖像的效果。其原理通常是利用開運算去除圖像中的雜散點,再由閉運算填充由于開運算所遺留下的缺口。同樣,閉-開濾波器(A·B°B)一樣可以起到圖像平滑的作用。然而在圖像處理中,單一的開-閉或者閉-開濾波器往往很難達到理想的濾波效果。且開運算的反擴展性和閉運算的擴展性會使得開-閉濾波器或閉-開濾波器的輸出幅度呈現(xiàn)偏小或偏大現(xiàn)象。本文將設(shè)計一種串聯(lián)式形態(tài)學濾波器,即采用開-閉交替順序的組合運算形式設(shè)計形態(tài)學濾波器。
2.2 結(jié)構(gòu)元素的選取
在形態(tài)學運算組合方式確定以后,結(jié)構(gòu)元素的選取則是影響濾波器輸出的關(guān)鍵因素。由于結(jié)構(gòu)元素對形態(tài)運算的結(jié)果有決定性的作用,因此,需結(jié)合所要處理圖片的實際應用背景和期望所得目標合理選擇結(jié)構(gòu)元素的大小與形狀。形態(tài)學中常用到的有方形、圓形、直線、余弦等形狀的結(jié)構(gòu)元素。從處理經(jīng)驗及技巧上,一般會選擇一個與希望處理的輸入圖象相同或者類似形狀的結(jié)構(gòu)元素。如圖2實例所示,這是工業(yè)現(xiàn)場由相機采集到的非均勻光照局部圖像,其產(chǎn)生不均勻光照的原因一方面是由于該采集視野較大,給四周加以條形光源后會使得中間部分卡片偏亮。另一方面則是由于卡片安置板的反光特性對卡片產(chǎn)生光照不均勻的影響。圖像處理的目的則是檢測出所有卡片輪廓。

圖2 卡片原圖
由于輸入圖像的目標信息形狀接近方形,首先可確定方形作為形態(tài)學濾波器的結(jié)構(gòu)元素形狀。文獻[13]中分別對形態(tài)學的組合運算進行討論分析,得出結(jié)論:多結(jié)構(gòu)元素的腐蝕、膨脹、開、閉濾波在細節(jié)保護方面均優(yōu)于單一結(jié)構(gòu)元素的開、閉濾波。因此,為更好地保留輸入圖像目標的輪廓信息,本文選取不同尺寸的方形結(jié)構(gòu)元素對其進行形態(tài)學濾波。結(jié)構(gòu)元素從3×3尺寸開始不斷增大,直至得出較好的檢測效果。3×3方形結(jié)構(gòu)元素如圖3所示。
圖3 3×3方形結(jié)構(gòu)元素
2.3 形態(tài)學濾波器設(shè)計
本文所涉及的濾波器示意圖如圖4所示,其中,結(jié)構(gòu)元素B尺寸不斷增大。

圖4 濾波器設(shè)計
3 本文算法及驗證
3.1 算法流程及實現(xiàn)步驟
本文算法是基于數(shù)學形態(tài)學,結(jié)合改進的Sauvola算法模型對非均勻圖像的二值化處理及并行優(yōu)化,基于本文算法主要思想,制定本文流程如圖5所示。
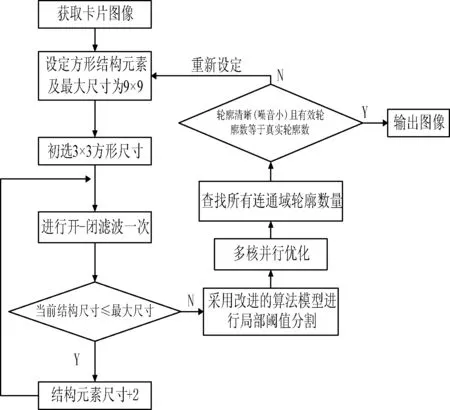
圖5 本文算法流程圖
具體算法步驟如下:
1) 根據(jù)輸入圖像的目標特性創(chuàng)建一個平坦的結(jié)構(gòu)元素,并設(shè)定結(jié)構(gòu)元素最大尺寸預定值w。本文根據(jù)卡片的形狀特性首先確定為方形結(jié)構(gòu)元素,結(jié)構(gòu)元素的尺寸選取通常應大于噪聲尺寸而小于非噪聲尺寸。本文噪聲來源于非均勻光照,經(jīng)局部閾值處理后呈現(xiàn)隨機斑點狀或條紋狀噪聲,結(jié)構(gòu)元素尺寸過小則無法覆蓋這些噪聲,過大則會造成相鄰兩個卡片發(fā)生連接導致目標破損,最終本文以不大于兩個相鄰卡片之間的距離設(shè)定最大結(jié)構(gòu)尺寸w=9(即9×9方形尺寸)。
2) 采用形態(tài)學交替順序濾波的組合方法對圖像執(zhí)行開-閉運算,其主要形式是從較小的結(jié)構(gòu)元素開始不斷增大結(jié)構(gòu)元素尺寸來執(zhí)行開-閉濾波。本文從3×3尺寸的結(jié)構(gòu)元素不斷增大到預定值9×9尺寸。分別進行了3×3、5×5、7×7、9×9四次不同尺寸結(jié)構(gòu)元素下的濾波操作。
3) 對于形態(tài)學處理之后的圖像,選定合適的模版大小ω,令k在0.1附近取值,計算出所分割區(qū)域的局部均值,再將任意當前點像素值與局部均值的差值代入至改進的Sauvola算法模型中進行局部閾值分割。式(6)中延續(xù)Sauvola算法中的最大標準差R值,直接取R=128進行計算。
4) 通過計算機的多核處理對所改進的算法模型進行并行優(yōu)化。
5) 根據(jù)所得圖像的去噪效果以及目標邊緣連續(xù)性返回步驟1),適當增加或降低預定值w,循環(huán)進行步驟2)-步驟4),直至得出較好的分割效果。本案例以提取所有連通區(qū)域輪廓,以檢測出正確有效的卡片輪廓數(shù)量和偽輪廓數(shù)量為判別效果好壞的標準。實驗證明,令w=9可以使圖像在保留邊緣信息的基礎(chǔ)上取得最好的去噪效果。
3.2 核心編程的實現(xiàn)
為了檢驗本文算法的可行性,本文在配置為8核的DELL服務器上以Matlab R2010b作為實驗平臺,對圖2所示的卡片圖像進行二值化分割。以下是本仿真m語言的二值化核心編程:
for i=3:2:9
%形態(tài)學交替濾波
se=strel(′square′,i);
%設(shè)置結(jié)構(gòu)參數(shù)
fasf=imclose(imopen(fasf,se),se);
%開閉運算
end
matlabpool local 8
%開啟8核并行處理環(huán)境
parfor i=1+ω:H+ω;
%Parfor并行循環(huán)
for j=1+ω:W+ω;
…
m_ij=mean(mean(fasf(ai:bi,aj:bj)));
%局部均值
l=sqrt(abs(double(fasf(i,j))-m_ij));
%局部均值偏差
T=m_ij+m_ij*k*((l/128)-1);
%局部閾值
…
3.3 實驗結(jié)果及分析
本文算法測試圖片(圖2)來源于真實工業(yè)現(xiàn)場的圖像的局部,采集使用工業(yè)相機拍攝,分辨率為:818×376,圖片格式為BMP,以四面條光作為光源。局部閾值算法中區(qū)域ω值的設(shè)置,既要求能保存足夠份量的局部信息,同時也要求能夠抑制噪聲及其他干擾對分割的影響。尺寸若取值過小,則引入局部信息不充分,易受外界的干擾,特別是在背景區(qū)域,尺寸過大則會使目標粘連導致目標信息丟失,本文以ω值小于相鄰兩卡片距離為標準進行選取。修正系數(shù)k值在Niblack算法中影響較大,k越小,則噪音越小,同樣目標信息也越容易丟失,在Sauvola算法及本文算法中k值影響較小,通常都需手動調(diào)試最優(yōu)。圖6-圖8均是在大量實驗下獲取的分割效果較好的圖像。圖6是用經(jīng)典Niblack算法處理所得效果圖,取ω=9,k=-0.4,為了獲取更好輪廓識別效果,使目標更清晰地顯示出來,在Niblack算法模型上整體減去2個灰度值的微調(diào)量。圖7是用Sauvola算法處理所得效果圖,取ω=9,k=0.15。圖8則用本文算法所得效果,取ω=9,k=0.1。

圖6 Niblack算法分割效果
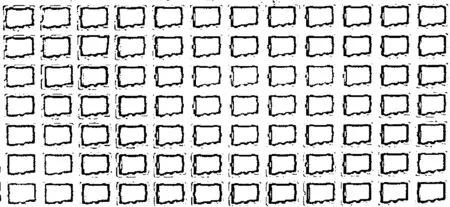
圖7 Sauvola算法分割效果

圖8 本文算法分割效果
從處理效果及算法抗噪性對比來看,Niblack算法抗噪性較差,在目標被分離出的同時,背景區(qū)域也會出現(xiàn)大量偽影及噪音斑點,圖像被進一步處理的難度較大。Sauvola算法在很大程度上對噪聲進行了抑制,但明顯可見部分卡片四周仍然存在線狀和斑點狀噪音干擾。本文算法結(jié)合數(shù)學形態(tài)學,對噪聲進行了進一步的抑制,并且不失目標邊緣特性。為更清晰地展現(xiàn)本文算法的優(yōu)越性,本文對三種算法處理所得圖像中所有連通區(qū)域的輪廓進行提取,理論目標輪廓數(shù)為84。實驗實際結(jié)果如圖9所示。
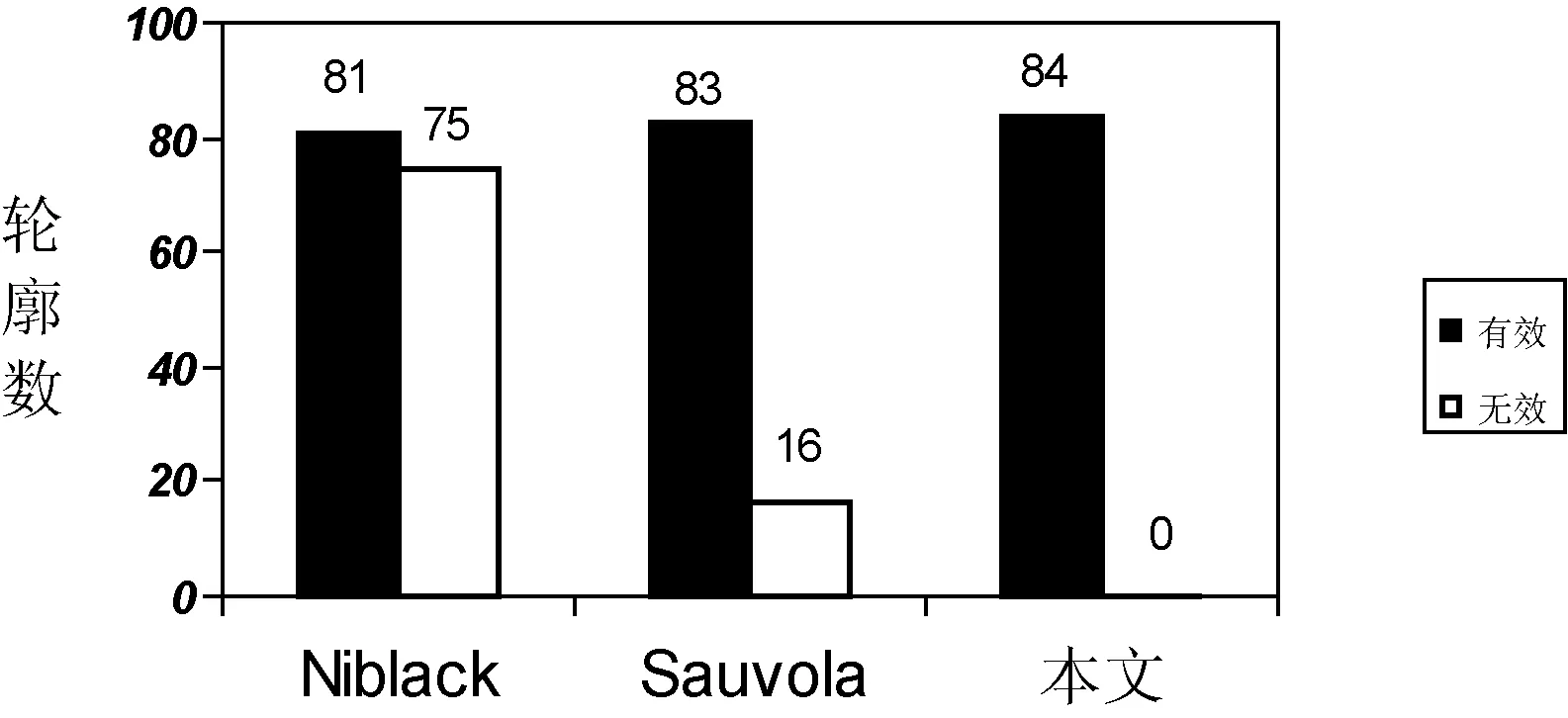
圖9 算法連通區(qū)域的輪廓數(shù)
Niblack算法處理圖像共檢測出156個輪廓,其中由于部分目標輪廓邊緣缺乏連續(xù)性,導致此部分輪廓缺失,因此有效輪廓數(shù)僅為81,噪音造成的偽輪廓數(shù)為75;Sauvola算法共檢測出99個輪廓,有效輪廓數(shù)83,偽輪廓數(shù)16;本文算法共檢測出84個輪廓,均為實際有效輪廓。結(jié)果證明,在抗噪性及邊緣連續(xù)性上,Sauvola算法優(yōu)于Niblack算法,本文算法優(yōu)于Sauvola算法。同時,分別計入了算法處理時間,如表1所示。改進的Sauvola算法由于脫離了標準差的計算,計算量減小一半,相較于其他兩種算法,在處理時間上有絕對的優(yōu)勢。但是在真正工業(yè)場合下,改進算法模型所用時間依然不能滿足工業(yè)場合下的實時性要求。本文在8核計算機上,利用8個處理機對算法模型進行并行運算優(yōu)化。其原理主要采用Matlab中的主從結(jié)構(gòu)的分布式計算,首先初始化Matlab中的并行環(huán)境,設(shè)置原先進程為主節(jié)點,同時初始化多個子節(jié)點,子節(jié)點之間獨立進行運算,運算過程中互不干擾,最終所有子節(jié)點將運算結(jié)果整合后傳遞主節(jié)點。并行優(yōu)化后的處理時間如表1所示。比較可得,算法模型的并行優(yōu)化在不改變圖像處理效果的基礎(chǔ)上大大縮短圖像處理所用時間,這給在大視野下較大尺寸的圖像處理提供實時性的保障。

表1 算法分割所用時間
為了進一步驗證本文算法的通用性,將本文算法脫離工業(yè)場合,應用于非均勻光照的文本圖像上進行驗證。相較于大視野下的非文本圖像處理,文本類圖像的分割則需選取一個較小的圓形結(jié)構(gòu)元素構(gòu)建形態(tài)學濾波器,最終分割效果如圖10所示,所用處理時間分別為:Niblack算法(8.221 3 s),Sauvola算法(8.002 9 s),經(jīng)并行優(yōu)化后的本文算法(0.481 5 s)。

圖10 非均勻光照文本圖像處理
4 結(jié) 語
針對經(jīng)典局部閾值分割法噪音大,處理時間長的弊端,本文基于Sauvola算法模型加以改進。以局部均值偏差替換標準差作為領(lǐng)域特性進行圖像處理,對圖像處理的算法模型再進行并行優(yōu)化,并結(jié)合形態(tài)學對非均勻光照下圖像處理所引發(fā)噪聲的抑制能力,處理得到的圖像不僅具備較好的抗噪性,同時還大大縮短了圖像處理時間,可以滿足工業(yè)生產(chǎn)要求。形態(tài)學的單次組合運算很難達到較好的處理效果,本文采用選取不同尺寸的結(jié)構(gòu)元素進行形態(tài)學的開-閉交替運算濾波方法,得出的圖像平滑效果良好。針對非均勻光照圖像的處理,尤其是大面積視野下小目標圖像分割問題,本文算法都能在大大縮短算法時間的同時進行很好的干擾屏蔽,具有一定通用性以及借鑒價值。
[1] 楊修國.關(guān)于直方圖雙峰法的研究與改進[J].電子設(shè)計工程,2012,20(12):176-179.
[2] 李敏,羅洪艷,鄭小林,等.一種改進的最大類間方差圖像分割法[J].南京理工大學學報,2012,36(2):332-337.
[3] Sahoo P K,Soltani S,Wong A K C,et al.A survey of thresholding techniques[J].Computer Vision Graphics & Image Processing,1988,41(2):233-260.
[4] 楊杰,付忠良,阮波.照度不均勻圖像的快速自適應灰度修正[J].計算機應用,2005,25(3):598-600.
[5] 黃蒞辰.非均勻光照下文本圖像分割算法研究[D].湖南:湖南科技大學,2015.
[6] 龍鈞宇,金連文.一種基于全局均值和局部方差的圖像二值化方法[J].計算機工程,2004,30(2):70-72.
[7] Bernsen J.Dynamic thresholding ofgray-level images[C]//Procof 8th Intel Conf.onPatt. Recon. Paris,France: IEEE Computer Society Press,1986:1251-1255.
[8] Sauvola J,Pietik?inen M.Adaptive document image binarization[J].Pattern Recognition,2000,33(2):225-236.
[9] 郭海濤,徐雷,趙紅葉,等.一種抑制聲吶圖像散斑噪聲的形態(tài)學濾波器[J].儀器儀表學報,2015,36(3):654-660.
[10] 郭景峰,申光憲,鄭繩楦,等.數(shù)學形態(tài)學在數(shù)字濾波中的應用研究[J].機械工程學報,2002,38(10):144-147.
[11] 肖啟芝,許凱,關(guān)澤群,等.一種形態(tài)學濾波結(jié)構(gòu)元的選擇方法[J].計算機工程與應用,2007,43(21):49-51.
[12] 岡薩雷斯.數(shù)字圖象處理(Matlab版)[M].電子工業(yè)出版社,2005.
[13] 劉志敏,楊杰.基于數(shù)學形態(tài)學的圖像形態(tài)濾波[J].紅外與激光工程,1999,28(4):10-15.
BINARIZATIONPARALLELMETHODFORNON-UNIFORMILLUMINATIONIMAGEBASEDONMORPHOLOGY
Cong Fei Zhang Qiuju
(SchoolofMechanicalEngineering,JiangnanUniversity,Wuxi214122,Jiangsu,China) (JiangsuKeyLaboratoryofAdvancedFoodManufacturingEquipmentandTechnology,Wuxi214122,Jiangsu,China)
In traditional industrial occasions, especially in the perspective of large area, the captured images often appear non-uniform illumination problems frequently. This brings a lot of difficulty for the division of image binarization and subsequent processing. Non-uniform illumination image processing usually uses the local threshold segmentation method. However, the classical local threshold segmentation method usually has the disadvantages of large noise, long processing time and so on. In order to improve these disadvantages, this paper put forward a method that use the theory of mathematical morphology and the improved Sauvola algorithm for non-uniform illumination image binarization research and parallel optimization. We have experimentally validated the card images collected under industrial conditions. The results show that the method not only can restrain the noise effectively and get good recognition effect, but also shorten the image processing time greatly.
Sauvola algorithm Non-uniform illumination Binarization Morphology Parallel optimization
2016-08-05。國家自然科學基金項目(51575236)。從飛,碩士生,主研領(lǐng)域:機器人視覺應用,圖像處理技術(shù)。張秋菊,教授。
TP3
A
10.3969/j.issn.1000-386x.2017.08.034
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
