基于加權最小二乘擬合的電動車ACC模式仲裁切換策略研究
2017-08-22 05:28:27李天驕孫成偉
汽車工程學報 2017年4期
初 亮,李天驕,孫成偉
(吉林大學 汽車仿真與控制國家重點實驗室,長春 130022)
基于加權最小二乘擬合的電動車ACC模式仲裁切換策略研究
初 亮,李天驕,孫成偉
(吉林大學 汽車仿真與控制國家重點實驗室,長春 130022)
傳統自適應巡航模式仲裁切換策略因未考慮環境變化對于基準加速度的影響,從而導致模式頻繁切換,加速度控制不精確。因此,設計了實時在線擬合的模式仲裁切換策略,利用擬合方法辨識行駛阻力模型關系式參數。對傳統最小二乘算法引入遺忘因子加權,削弱歷史數據影響,滿足對時變數據的跟隨。優化求解算法,通過遞推運算提高算法效率從而滿足控制實時性要求。仿真驗證算法在外界有風速干擾和坡度干擾的情況下預測基準加速度的準確性,結果顯示,穩態時預測基準加速度準確性較高;在外界環境突變后,算法能較快適應新的環境參數。
公路運輸;模式仲裁切換策略;最小二乘擬合;自適應巡航;純電動車
電動車自適應巡航控制(Adaptive Cruise Control,ACC)系統縱向動力學控制包括驅動控制和制動控制。通過控制驅動電機電流,輸出驅動轉矩,經過主減速器、半軸、車輪傳導到地面實現整車的驅動;通過控制車身電子穩定性控制系統能量吸收式方向機 柱(Energy-absorbing Steering Column Electronic Speed Controller, ESC)的柱塞泵和電磁閥,獲得制動壓力,再經過輪缸、制動鉗、制動盤、車輪等傳導到地面實現整車的制動。由于驅動控制和制動控制的傳遞路徑以及控制方法差異較大,在ACC系統中驅動控制算法和制動控制算法一般分為兩個獨立的控制模塊,二者不能同時動作[1-2]。因此,在ACC系統中需要一個控制模式仲裁切換策略,決策對于需求狀態的控制模式。
由于車輛傳動系和制動系的內部阻力以及外界環境對車輛的行駛阻力的存在,車輛在滑動狀態(既不驅動也不制動)下不會產生0加速度,其值會隨著外界阻力的變化而變化,定義滑動狀態時的加速度為基準加速度。基準加速度的選取對車輛驅動控制或制動控制有著重要的意義,基準加速度選擇的不精確,會導致ACC系統工作時在驅動模式和制動模式之間頻繁切換,不僅加快部件磨損,還會導致實際的加速度或減速度相較于目標值產生較大的誤差。
目前,對于電動車ACC控制模式仲裁切換策略的研究較少。裴曉飛等[3]提出一種ACC分層控制算法,通過取車輛節氣門開度為0的滑行試驗,直接測出不同車速下該車能夠獲得的最大減速度值,結果濾波得到節氣門/制動控制切換時的加速度基準曲線。李以農等[4]通過分析車輛縱向動力學模型,列解加速度基準曲線方程,并在切換面加入緩沖層,建立加速/制動的邏輯切換規律。總之,目前對于ACC系統的控制模式仲裁切換策略主要有兩種方案,一種是通過一次試驗獲得車速-基準加速度關系表,通過查表法得到不同車速下的基準加速度;另一種是根據車輛驅動和制動的動力學模型,得到車速-基準加速度關系式,通過代入計算式求解得到基準加速度。然而兩種方案均是通過一次離線計算獲得車速-基準加速度關系,未考慮外界阻力變化對基準加速度曲線的影響。對于不同參數的車型需要重新進行試驗或參數匹配,因而帶來額外的成本和工作量。
針對常規ACC控制模式仲裁切換策略的不足,本研究建立了一種在線獲得車速-基準加速度關系式的ACC控制模式仲裁切換算法,可以根據歷史數據實時修正車速-基準加速度關系曲線。首先分析車輛縱向動力學模型,得到車速-基準加速度關系式,并通過改進的最小二乘擬合法實時擬合關系式參數。考慮傳統最小二乘擬合法計算量大,難以滿足整車控制器實時性計算要求,本研究優化了傳統最小二乘擬合法,通過遞推運算大幅減少計算量,同時考慮到外界環境的突變,對于最小二乘擬合法引入遺忘因子加權,通過對歷史數據折舊使算法快速適應外界環境變化。
1 車輛縱向動力學模型分析
面向ACC系統的動力學分析僅需考慮車輛縱向動力學分析,即驅動、制動過程的動力學模型。汽車在行駛過程中的受力如圖1所示。

圖1 汽車受力示意圖
汽車在行駛過程中受到的阻力主要包括四部分:滾動阻力、空氣阻力、坡度阻力、加速阻力。由驅動電機、傳動系統傳遞的力矩作用于車輪上,以克服上述阻力。列出汽車驅動力與行駛阻力平衡方程式為[5]:

式中:Ft為汽車驅動力;Fr為滾動阻力;Fw為空氣阻力;Fi為坡度阻力;Fa為汽車受到的加速阻力。
1.1 驅動力
汽車的驅動力由電機產生的驅動轉矩經過主減速器和半軸傳遞至車輪。計算式(2)為:

式中:Mmotor為電機轉矩,Nm;r為輪胎滾動半徑,m;ig為變速器傳動比;i0為主減速器傳動比;ηt為傳動系總傳動效率。
1.2 制動力
ACC狀態的制動力由ESC柱塞泵增壓,控制ESC的溢流閥實現壓力控制。制動壓力傳遞至輪缸,經過制動鉗作用于車輪產生制動力。計算式(3)為:

式中:Fb為路面作用于輪胎的總制動力,N;μw為制動盤效能因數;Dw為制動輪缸有效直徑,m;Pc為輪缸制動壓力,Pa;Re為制動盤有效半徑,m。
1.3 滾動阻力
通常認為各車輪受到的滾動阻力相等,且所有車輪載荷之和等于車重。若在坡度為θ的道路行駛,滾動阻力計算式(4)為:

式中:fR為滾動阻力系數;G為整車重量,N;θ為坡度角。
隨著車速的提高,車身會受到沿著車身z軸方向的空氣升力,考慮空氣升力,滾動阻力計算式(5)為:

式中:Fwz為空氣沿汽車法向產生的升力,N。
1.4 空氣阻力
車輛會受到沿著縱向的空氣阻力以及沿著法向的空氣升力。空氣阻力與本車速度和環境風速有關,計算式(6)為:

式中:Fwx為沿著汽車縱向的空氣阻力,N;ρ為空氣密度,N·s2/m4;Cx為縱向空氣阻力系數;Cz為垂向空氣阻力系數;A為車輛迎風面積,m2;vx為縱向車速,m/s;vwind為縱向風速,m/s。
1.5 坡度阻力
當道路有坡度時,汽車重力沿著道路方向的分量表現為坡度阻力,坡度阻力大小和方向與坡度角有關。

1.6 加速阻力
車輛加速或減速時,由車輛平移質量,傳動軸、車輪等旋轉部件的轉動慣量引起的慣性阻力成為加速阻力,一般用旋轉質量換算系數將旋轉部件的轉動慣量換算為車輛平移質量。
式中:δ為旋轉質量換算系數;m為車輛整備質量,kg;a為車輛縱向加速度,m/s2;Jrf為前軸轉動慣量,kg·m2;Jrr為后軸轉動慣量,kg·m2;Ji為傳動系轉動慣量,kg·m2。
2 模式仲裁切換策略
根據汽車縱向動力學模型,在車輛滑行狀態下的車輛加速度與速度存在的二次關系式為:

車輛在行駛過程中,由于外界風速、道路坡度等因素均在不斷變化,關系式中的系數A、B、C數值也在不斷變化。可以考慮在行駛過程中利用最小二乘擬合法實時辨識關系式中的參數,然而傳統最小二乘擬合法不但計算量大,效率低,難以實現汽車控制系統實時性的要求,而且其擬合多項式參數多基于離線數據,當外界環境變量突變后,算法對于時變數據的跟蹤能力不夠,導致環境變化初期參數辨識結果不準確。本研究基于上述兩點,優化了傳統最小二乘擬合法。
2.1 最小二乘擬合法
首先介紹傳統最小二乘擬合法[6]。假設給定一個數據訓練集:

式中:xi∈R為輸入變量x的觀測值;yi∈R是對應輸出變量y的觀測值;i=1,2,3,4,…,N。解決的問題是基于最小二乘法,利用已有觀測值擬合目標多項式的參數。欲擬合的N次多項式可定義為:
式中: wi為第i次多項式擬合的系數。
令各點到曲線的距離最小,偏差平方和最小:

式中:L(w)為各點到擬合曲線的偏差平方和。
為求得符合條件的wi,用式(11)求偏導得式(12):

對于求解的wi,可以整理為式(13)所示的正規方程組。

求解方程組即可求得(w1,w2,…,wm)。
2.2 加權遞推的最小二乘法擬合算法
針對本文研究的問題,令xi為觀測的車速歷史數據,yi為觀測的加速度歷史數據。選取觀測數據點越多,抗噪聲性越強,擬合精度越高,同時計算效率降低,當數據點過多時,最小二乘擬合法會出現數據飽和現象,以致算法失去修正能力[7]。選擇合適的觀測數據隊列規模,以兼顧算法的準確性及跟隨性。每一個采樣周期觀測數據(xi,yi)儲存于隊尾,同時剔除隊首觀測數據,并對新一組觀測數據進行參數擬合。
傳統最小二乘擬合法對于每一個數據點的重要度是相同的,然而在車輛行駛過程中,外界環境變量發生變化,算法往往希望擬合結果能盡快適應新的環境。變化后的環境信息一般蘊藏在新觀測的數據點中,而與先前觀測數據點的關系將逐漸減弱。利用遺忘因子λ來降低老數據提供的信息量。定義遺忘因子λ∈(0,1),與觀測時間呈線性關系如式(14)所示,觀測時間越靠后遺忘因子越大,數據點重要程度越高。

根據給定的數據集(xi,yi)(i=1,2,3,4,…,M),將最小二乘擬合法所得式(11)修正為式(15):

相應得到的正規方程組(16)為:

定義
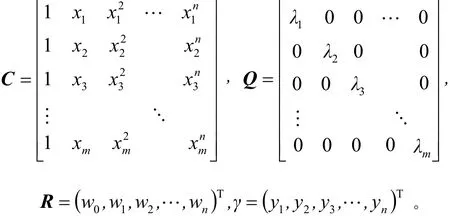
正規方程組可化為:

式中:矩陣Q、矩陣R及向量γ均為定值。在每次辨識參數過程中,僅需重新計算矩陣C,解正規方程組即可求解多項式參數(w0,w1,w2,…,wn)。C矩陣中在傳統求解最小二乘擬合法中,需要完成所有觀測點冪指數的運算難以滿足整車控制器實時運算要求。然而對于該問題,每一個周期的觀測數據序列僅是第一個觀測點和最后一個觀測點發生了變動,因此僅需計算最新獲取的觀測點的冪指數值并將C矩陣數據平移一位,即可實現求解計算。如式(17)所示,算法復雜度為O(N),大大提高計算效率。

當ACC系統輸出的期望加速度在基準加速度時,由于基準加速度的實時變化,將導致控制系統頻繁地在驅動模式和制動模式之間切換,不僅帶給駕駛員不舒適的駕乘感受,還會加速執行機構的磨損老化。在切換邏輯曲線上下兩側設置一個寬度范圍為2H的緩沖區域[8],一般取緩沖區域H=0.1 m/s2,如圖2所示。

圖2 模式切換邏輯曲線
模式仲裁切換策略包括參數辨識和模式仲裁兩部分,如圖3和圖4所示。參數辨識算法運行周期為0.2 s,模式仲裁運行周期與ACC控制層運行周期一致。在參數辨識模塊中,首先從CAN總線獲取本車的車速和加速度信息,并將車速和加速度加入觀測數據隊列。若隊列數據填滿,剔除第一組觀測數據,更新C矩陣數據,根據隊列長度產生權重矩陣Q。然后求解正規方程組,得到多項式系數向量R,并向模式仲裁模塊輸出辨識參數A、B、C。
模式仲裁模塊與ACC控制層協同工作。ACC控制層響應決策層目標加速度需求,交由模式仲裁模塊確定驅動模式或制動模式。模式仲裁模塊根據當前車速和辨識參數確定基準加速度a0。若目標加速度ades大于a0+H,則切換為驅動控制模塊,修正目標加速度為ades-a0。若目標加速度ades小于a0-H,則切換為制動控制模塊,修正目標加速度為ades+a0,輸出至制動控制模塊。若目標加速度ades在a0-H與a0+H之間,則保持原有工作模式,不對目標加速度進行修正。
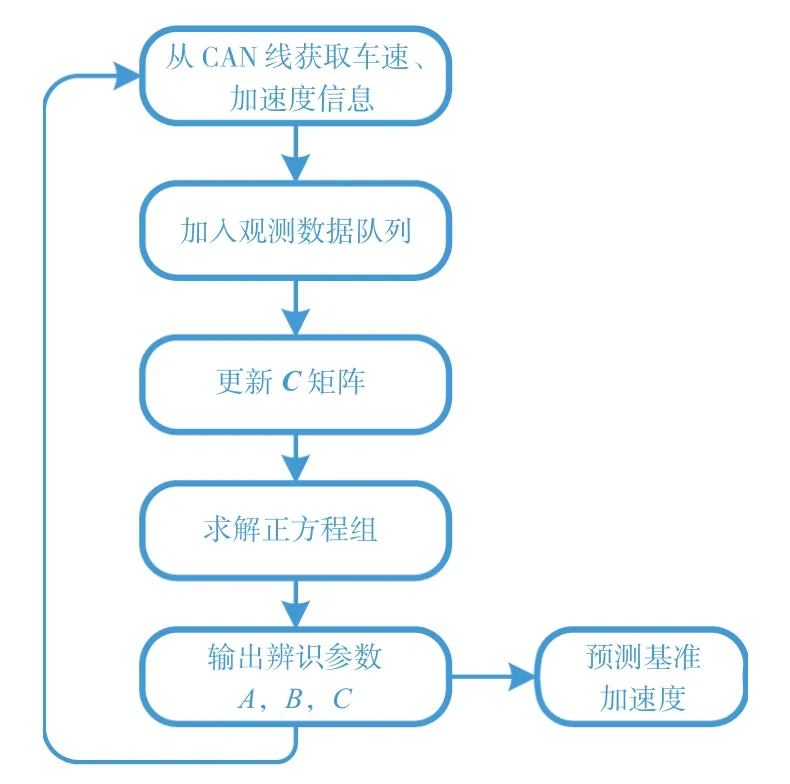
圖3 參數辨識模塊流程圖

圖4 模式仲裁模塊流程圖
3 仿真與結果分析
為驗證算法的預測精度,本研究在Matlab/ Simulink下與CarSim 進行聯合仿真。在CarSim中模擬環境變量,設置風速、坡度作為干擾量。在Matlab/Simulink中搭建模式仲裁切換算法的控制模型。設置車輛初始速度為120 km/h,使車輛在直線道路上滑行。設置模式仲裁切換算法的觀測數據隊列長度M=10。在CarSim中定義風速時間歷程如圖5所示。
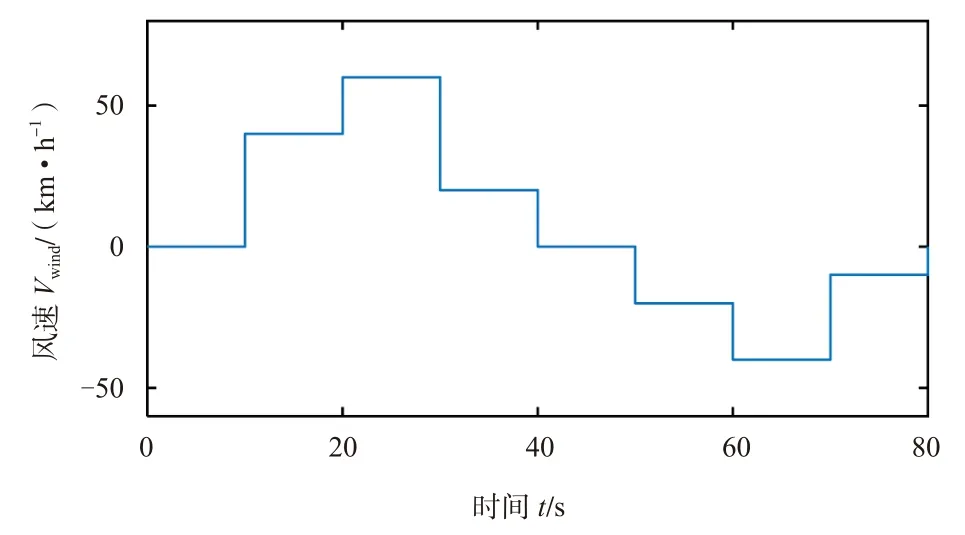
圖5 風速時間歷程曲線
預測基準加速度曲線如圖6所示。由圖可知,其中虛線為實際車輛加速度,實線為模式仲裁切換策略預測的基準加速度。預測基準加速度誤差率如圖7所示,在外界環境突變時,預測有較大誤差,平均誤差率為0.98%。結果表明,本研究所設計的模式仲裁切換算法預測基準加速度能夠實時跟蹤外界環境變化,且有較高的預測精度。仿真過程車速變化曲線如圖8所示,仿真結束時車速為48 km/h。

圖6 預測基準加速度曲線
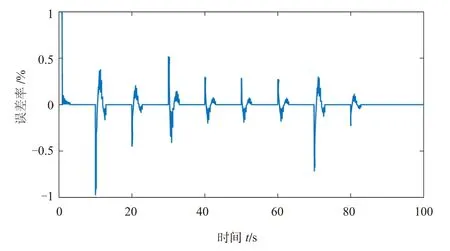
圖7 預測基準加速度誤差率

圖8 仿真過程車速變化曲線
下面截取0~15 s數據進一步分析仿真初始階段及外界環境突變后的仿真結果,如圖9所示,由于擬合二次多項式參數,需要至少3組數據,因此在前3個周期內無輸出預測基準加速度。從第4個周期開始,隨著觀測數據隊列長度的增加,預測基準加速度逐漸貼近實際加速度。在10 s時,風速由0 km/h突變為40 km/h,預測基準加速度曲線在延遲和超調后趨于穩定,適應了外界環境的變化,說明本研究基于加權最小二乘擬合法具有對外界變化較好的跟隨性。
CarSim中定義道路高度變化如圖10所示。仿真參數不變,驗證算法在坡度干擾下的仿真,結果如圖11和圖12所示。圖11為預測基準加速度曲線,整體跟隨性較好,在坡度變化較大的位置,誤差率較高。圖12為車速變化曲線,仿真終止時車速為64 km/h。
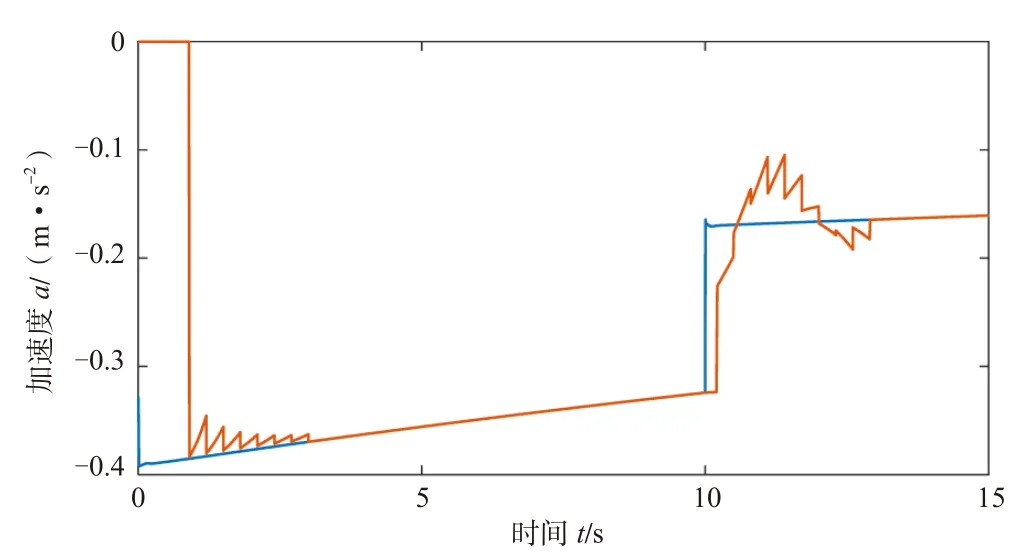
圖9 初始段仿真曲線
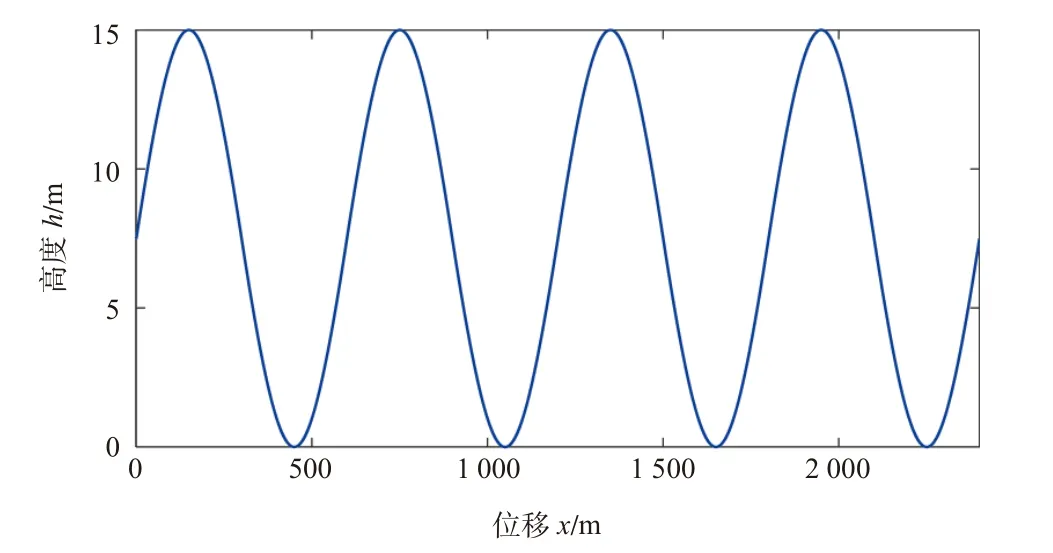
圖10 道路高度變化

圖11 預測基準加速度曲線
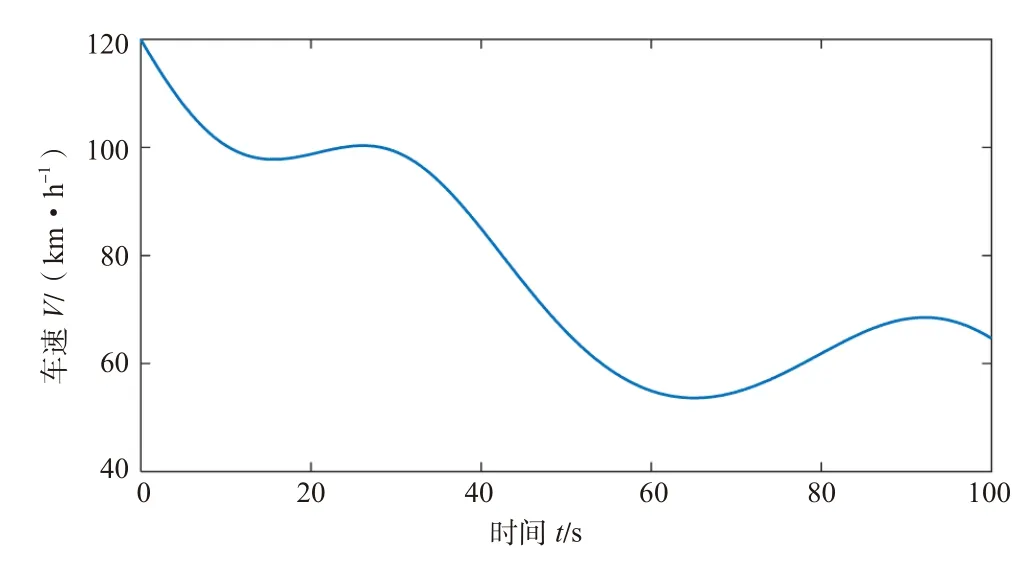
圖12 車速變化曲線
4 結論
傳統模式仲裁切換策略均是通過一次離線獲得車速-基準加速度關系,未考慮外界阻力變化對基準加速度曲線的影響。因此,本研究設計了基于加權最小二乘的電動車ACC模式仲裁切換策略。首先分析了自適應巡航下的整車縱向動力學模型,得到驅動力、制動力與行駛阻力的關系。進一步得出在滑行狀態下,車速與加速度的關系,利用最小二乘擬合法辨識關系式參數。介紹了傳統最小二乘擬合法,并對該算法加以優化:引入遺忘因子加權,對歷史數據折舊處理,滿足對時變數據的跟隨;基于歷史數據的遞推計算,減少運算量滿足車輛控制實時性的要求。
最后通過Matlab/Simulink與Carsim聯合仿真,驗證算法在外界的風速干擾和坡度干擾下預測基準加速度的準確性。結果顯示,穩態時預測基準加速度準確性較高;在外界環境突變后,算法瞬間會出現較大誤差。幾個工作周期后,能較快適應新的環境參數。
(References):
[1] 嚴偉. 仿駕駛員速度跟隨行為的自適應巡航控制算法研究[D]. 長春:吉林大學,2016. YAN Wei. Study on Adaptive Cruise Control Algorithms Imitating Car-following Behaviors of Drivers[D]. Changchun:Jilin University,2016. (in Chinese)
[2] 李朋,魏民祥,侯曉利. 自適應巡航控制系統的建模與聯合仿真[J]. 汽車工程,2012,34(7):622-626. LI Peng,WEI Minxiang,HOU Xiaoli. Modeling and Co-simulation of Adaptive Cruise Control[J]. Automotive Engineering,2012,34(7):622-626. (in Chinese)
[3] 余志生. 汽車理論[M]. 北京:機械工業出版社,2009. YU Zhisheng. Automobile Theory[M]. Beijing:China Machine Press,2009. (in Chinese)
[4] 陳桂秀. 用程序求解最小二乘擬合多項式的系數 [J]. 青海師范大學學報(自然科學版),2010,26 (3):14-17. CHEN Guixiu. Program to Solve The Least Squares Fitting Polynomial Coefficient[J]. Journal of Qinghai Normal University (Natural Science),2010,26 (3):14-17. (in Chinese)
[5] 陳良波, 鄭亞青. 基于最小二乘法的曲線擬合研究[J].無錫職業技術學院學報,2012,11 (5):52-55. CHEN Liangbo,ZHENG Yaqing. Study on Curve Fitting Based on Least Square Method[J]. Journal of Wuxi Institute of Technology,2012,11 (5):52-55. (in Chinese)
[6] 馬國成. 車輛自適應巡航跟隨控制技術研究[D]. 北京:北京理工大學,2014. MA Guocheng. Research on the Adaptive Cruise Control Tracking System Applied for Motor Vehicles[D]. Beijing:Beijing Institute of Technology,2014. (in Chinese)
作者介紹

責任作者:初亮(1967-),男,吉林長春人。教授,博士生導師,主要從事節能與新能源汽車方面的研究。
Tel:13134313218
E-mail:chuliang@jlu.edu.cn
Research on ACC Pattern Switching Strategy Based on Weighting Least Squares Fitting
CHU Liang,LI Tianjiao,SUN Chengwei
(State Key Laboratory of Automotive Dynamic Simulation and Control,Jilin University,Changchun 130022,China)
The traditional adaptive cruise control (ACC) pattern arbitration switching strategy might cause frequent pattern switching and inaccurate control of acceleration. Accordingly, a pattern switching strategy with real-time online fitting was designed. The relational parameters in the driving resistance model were identified by using the fitting method. The traditional algorithm for least squares fitting was improved by introducing the weighting factor to follow the time-varying data. Based on the recursive operation on historical data, the efficiency of the algorithm was improved and the requirement of real-time control was satisfied. The algorithm was verified by simulation and prediction of the baseline acceleration with the disturbances of wind speed and road slope. The results show that the baseline acceleration is more accurate in steady state and the algorithm can adapt to the new environmental parameters quickly as the external environment changes.
highway transportation;pattern arbitration switching strategy;least squares fitting algorithm;adaptive cruise control;electric vehicle

U469.72
A
10.3969/j.issn.2095-1469.2017.04.03
李天驕(1992-),吉林長春人。碩士研究生,主要從事新能源汽車自適應巡航系統研究。
2017-02-13 改稿日期:2017-03-30
國家高技術研究發展計劃(863)(2012AA110903)
參考文獻引用格式:
初亮,李天驕,孫成偉. 基于加權最小二乘擬合的電動車ACC模式仲裁切換策略研究[J]. 汽車工程學報,2017,7(4):253-260.
CHU Liang,LI Tianjiao,SUN Chengwei. Research on ACC Pattern Switching Strategy Based on Weighting Least Squares Fitting[J]. Chinese Journal of Automotive Engineering,2017,7(4):253-260.(in Chinese)
Tel:18243189214
E-mail:ccqwetqwe@163.com