數據驅動視角下飛機故障預測與健康管理系統設計及驗證
2017-08-30 00:01:20劉亮,周博,于濤,張寧
計算機測量與控制 2017年7期
劉 亮,周 博,于 濤,張 寧
(沈陽飛機設計研究所, 沈陽 110031)
數據驅動視角下飛機故障預測與健康管理系統設計及驗證
劉 亮,周 博,于 濤,張 寧
(沈陽飛機設計研究所, 沈陽 110031)
由于故障預測與健康管理系統(PHM)是涉及多層次、多領域、耦合度高的復雜系統,很難從整體對PHM系統進行設計和驗證,所以始終沒有成熟的工具和方法;從數據驅動的視角,研究了飛機PHM系統設計及驗證;以數據為主線,采用了4種方法實現PHM系統設計及驗證:1)采用系統建模語言(SysML)進行PHM系統的架構設計;2)采用基于事件的方法將被觀測系統的行為狀態化,實現PHM系統中資源的充分利用,降低局部的資源壓力;3)采用基于模型的推理方法,實現了系統狀態模型的應用;4)采用多線程、異構能量耦合等方法定義了一個PHM仿真框架,并在該框架指導下開發了一個仿真環境,并針對機載配電系統設置了幾種測試用例進行診斷推理,對提到的各種方法進行了驗證;研究結果表明,上述方法是合理有效的,可以構建描述完整、資源均衡的PHM系統架構。
故障預測與健康管理;系統建模語言;基于模型的推理;驗證框架
0 引言
故障預測與健康管理(PHM)是國內外普遍認可、能夠顯著提升裝備維護保障能力的關鍵技術,可以實現飛機的維護模式從事后維護、定期維護到視情維護、信息化維護的跨越,降低保障費用,提高飛機的安全性、完好性和任務成功性[1]。對于飛機故障預測與健康管理,NASA、洛馬、波音等在PHM領域開展了持久而深入的研究,但沒有形成成熟的理論、方法和工具來支撐故障預測與健康管理(PHM)的設計和驗證。
本文面向飛機故障預測與健康管理設計和驗證,主要探討了以下內容:1)在數據驅動視角下,用系統建模語言(SysML)進行故障預測與健康管理系統設計;2)利用基于事件的方法對具有混合行為的系統進行狀態化處理,降低PHM系統的數據密度;3)利用沖突識別和候選產生,進行基于模型的推理,實現故障的診斷定位;4)定義一個PHM驗證框架,實現對PHM理論、架構、方法的驗證。
1 數據驅動視角下PHM系統設計
常見的系統設計都有成熟的理論和方法,如電氣系統可以采用電路理論和AutoCAD等工具,機械系統可以采用多體理論和CATIA等工具。故障預測與健康管理(PHM)系統是與航電、飛管等系統高度耦合的、分布在系統級、區域級、飛機級和地面等高度層次化的、物理載體多樣且系統邊界較為模糊的一種系統,所以PHM系統的設計具有一定的挑戰性。
要實現PHM系統的設計表達,必須對系統做進一步抽象,從更高一級抽象層次上才能描述下一級的復雜系統。系統建模語言(SysML)從高度抽象的角度將系統統一抽象為行為要素和結構要素,并用9種圖進行表達,只要是一個系統就可以用SysML進行表達[2]。結合面向對象的系統工程方法(OOSEM)等方法論,通過不斷的定義和分解,得到合理的PHM設計描述。

圖1 系統建模語言組成
系統的設計開發有許多視角,如能量視角、經濟性視角、可靠性視角等,不同的視角決定了不同的系統形態。故障預測與健康管理(PHM)是信息化與工業化相融合的一個典型范例,是一種數據密集型的系統,所以可以采用數據驅動的視角,從數據的產生、傳輸、處理和使用的過程,來分析和設計PHM系統。
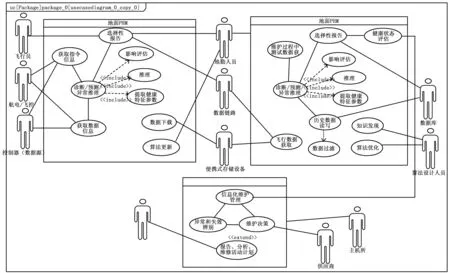
圖2 PHM系統用例(UCD)
從數據驅動視角,利用系統建模語言中的用例圖對PHM系統提供的外部可見服務,觸發和參與用例的執行者,以及在環境、系統間流動的各種數據描述如圖2所示。在圖2中描述的PHM系統主要分為機上PHM系統、地面PHM系統和自主后勤信息系統3個部分;PHM系統的外部環境主要包括機上各系統、空地勤人員等;在環境與系統間交互的數據主要包括:傳感器數據、指令數據、記錄數據、實時數據、歷史數據、鏈路數據、結果數據、報告數據等。

圖3 PHM系統功能活動圖(ActD)
從數據驅動視角,利用系統建模語言中的活動圖對PHM系統具備的各項功能行為,以及隨著時間推移和事件發生,數據如何在功能行為間產生和流動進行描述如圖3所示。PHM系統要具備故障檢測、故障隔離、預測、部件壽命跟蹤、性能降級趨勢跟蹤、故障選擇性報告、輔助決策和資源管理、信息融合、信息管理等功能,在PHM系統運行過程中,這些功能要產生數據、分發數據、處理數據。
從數據驅動視角,利用系統建模語言中的塊定義圖對PHM系統組成要素、相互關系、數據空間進行描述如圖4所示。圖中展示了一種空地聯合、層次化的PHM系統。利用系統建模語言中的內部塊圖描述PHM系統元素內部詳細的數據連接,定義了實例提供的屬性、操作和接口,說明了各組成部分在數據層面該如何集成才能夠實現PHM系統元素功能,如圖5。

圖4 空地結合、層次化的體系架構塊定義圖(BDD)

圖5 機上區域級PHM及與各分系統關系(IBD)
利用系統建模語言的序列圖為PHM系統提供一種動態視圖,描述數據行為發生的順序,執行數據行為的元素和觸發事件的元素。圖6描述了PHM系統進行區域級診斷推理的一個運行場景。飛行員發出指令后,RIU將指令傳遞到閥并監測閥的位置,當在規定時間內沒有達到位置,RIU中的周期BIT軟件會設置“卡滯故障”信號,但此時不能確定閥是處于關閉卡滯、中途卡滯、還是打開卡滯。RIU中軟件將這些信號打包為健康報告代碼(HRC),發送HRC到PHM區域管理器。區域管理器收集機上的其他信息,并將這些信息送入基于模型的推理引擎,做交叉確認推理。推理機結合其他信息,包括命令,閥位置,從雷達來的工作信號,環境空氣數據,閥特征曲線,確定或否決(虛警)閥的卡滯故障。如果推理機確認卡滯故障是真實故障,推理機將根據雷達的溫升等信息確定是關閉還是打開卡滯,并且信息被送到飛行器區域管理器。然后結合飛機級推理輸出和其他飛機信息,產生一個預先定義的健康報告代碼(HRC),送到飛行員顯示、AMD/PMD存儲和下行數據鏈路。在座艙一個顯示器上,飛行員將會看到一個顯示,如”雷達液冷閥關閉卡滯,液冷循環性能降級”。

圖6 PHM系統進行區域級診斷推理的運行場景(SD)
在流程、方法和工具的支撐下,通過不斷的迭代優化,可以得到具有合適顆粒度、描述完整的PHM設計模型,可以得到各元素面向對象的屬性、操作和接口,以及系統的集成方法和測試場景,并且在Rhapsody等工具支持下,可以保證PHM設計的合理性、一致性、無二義性,為PHM在飛機上的集成應用奠定堅實的基礎。
2 基于事件的系統狀態模型
從數據驅動視角分析,圖5中描述區域級等綜合診斷推理過程,可能會存在一些問題。對于PHM系統常見的監控對象,如機電系統等,包括了流體、機械等連續動力學過程,也包括邏輯控制等離散過程,是一個典型的具有連續和離散混合行為的系統。要實現PHM要求被測系統具有可觀測性,對于連續過程,系統的行為可描述為:

y(t)=h(x(t),θ(t),u(t))+n(t)
x(t)是狀態向量,θ(t)是參數向量,u(t)是輸入向量,v(t)是噪聲向量,n(t)是測量噪聲向量,y(t)是輸出向量,系統的可測向量是y(t)的一部分。
對于連續系統開展常規的基于模型的推理,就是依據實時采集y(t)、u(t)、n(t)去計算辨識θ(t)和x(t),再根據θ(t)和x(t)去評估系統健康狀態的過程。從數據角度,各傳感器采集點會產生大量的數據。如果采用集中處理方式,需要將大量的系統運行狀態數據上傳上一級推理機進行綜合推理。在進行綜合推理時,要采用連續系統模型,可能會給局部的計算、存儲、總線等資源造成較大的壓力。
為了克服上述問題,在綜合推理中可以采用一種基于事件的有限狀態機模型,用一種低數據密度的方法表達知識并推理。可以采用分布式形式,利用各控制器中的閑置計算資源,將系統部件的連續行為離散化為狀態后在上傳。

圖7 不同處理形式的資源壓力對比
有限狀態機是一個包含狀態和轉移的系統,可以使用最少的組分建立系統模型,將狀態、輸入和輸出結合起來,而不是僅用輸入和輸出描述系統。用狀態機描述一個系統為
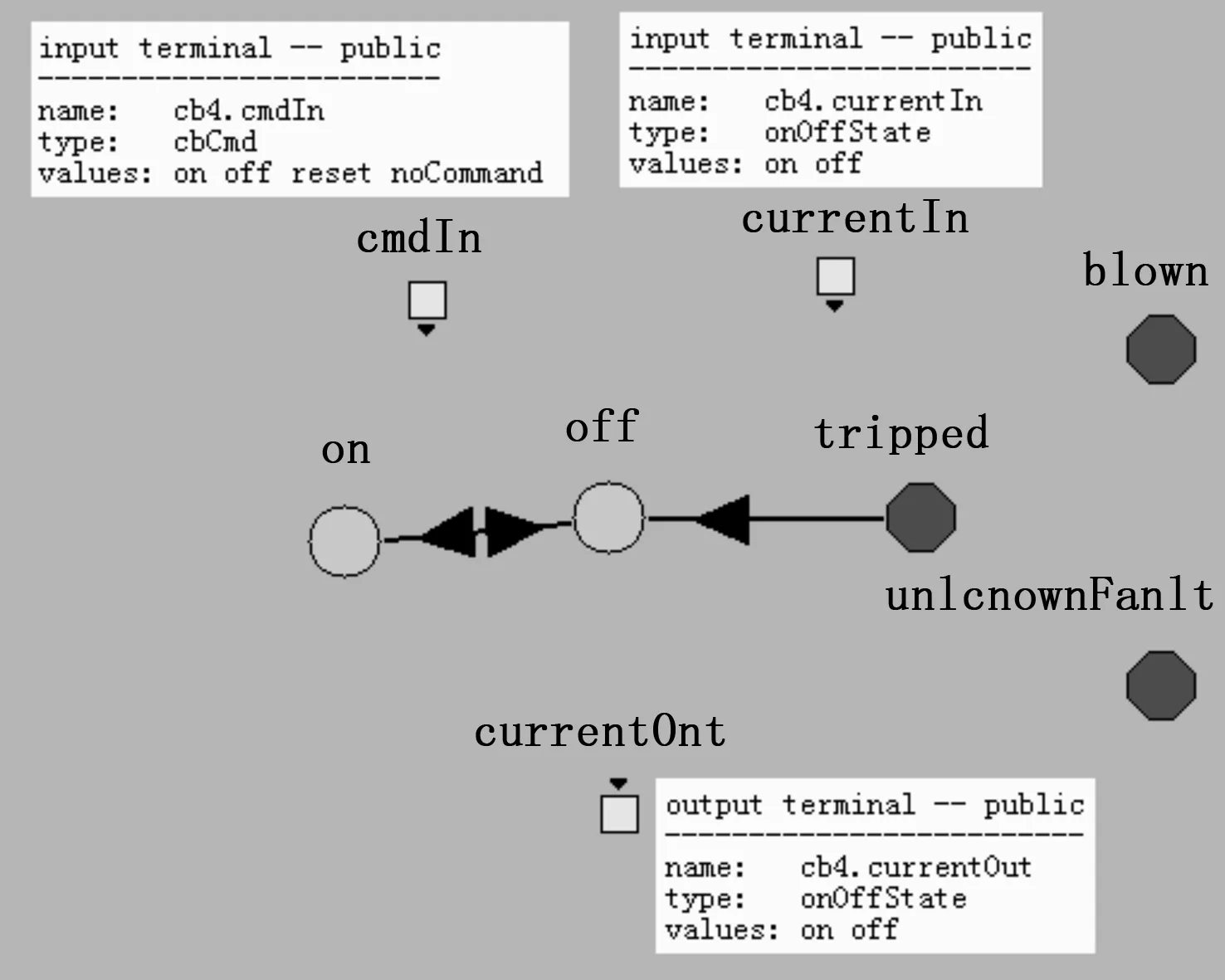
圖8 固態功率控制器(SSPC)基于事件的狀態模型
3 基于模型的推理(MBR)
基于模型的推理分析方法采用模型作為知識的表達,能夠克服專家系統的知識獲取瓶頸,在復雜系統的故障診斷推理方面有非常多的應用。該方法通過描述設備內部結構和行為的模型來預測設備的預期行為,通過觀測可知設備都作了哪些工作,而預測則是要求設備在同樣情況下應該作哪些工作。如果這兩者出現了差異,就產生了診斷問題[3]。
在基于模型的推理中,給模型一個輸入集合,這個輸入集合在模型內部進行傳播,然后產生一個輸出集合,這個輸出集合稱為系統的期望輸出,即系統正常時的輸出值。如果系統的實際輸出同期望輸出不一致,就稱此為“沖突”,這表明實際系統有故障存在,找出引起這種不一致現象的原因集合,則稱為沖突識別。
在沖突識別中,將系統抽象地描述成一個3元組合(SD,CMPS,OBS)。其中,SD為系統描述,反映系統預期輸出行為;CMPS為系統部件集;OBS為系統觀測,反映系統實際輸出行為。另外,用到一階謂詞AB(異常)和AB(正常)。假設系統有n個部件,用謂詞邏輯的析取式:SD∪{AB(C1),…,ABCn)}表示當所有部件正常時系統的預期輸出行為。

圖9 基于模型的推理過程
對于圖9中a)表達的系統,利用3元組合進行描述如下:
CMPS={M1,M2,M3,A1,A2}
SD={MULT(M1),MULT(M2),MULT(M3),ADD(A1),
ADD(A2),in2(M1)=in1(M3),out(M1)=in1(M2),out(M2)=in2(A1),out(M2)=in1(A2),out(M3)=in2(A2),
MULT(x)→AB(x)→out(x)=in1(x)*in2(x),
ADD(x)→AB(x)→out(x)=in1(x)+in2(x)}
在實際工作過程中,若系統發生故障,其實際輸出行為值將與當所有部件假設正常時的系統預期輸出行為值之間產生沖突,即系統觀測OBS與SD∪{AB(C1),…,AB(Cn)}之間出現不一致,也就是產生了沖突集,沖突集是指系統中某個特定部件組合,當該組合中所有部件均假設正常時,系統預期輸出行為值與系統實際輸出行為值之間產生沖突,該部件組合為系統的一個沖突集,也就是滿足SD∪OBS∪{AB(C1),…,AB(Ck)}為真。如圖9中b)表達的過程獲得兩個沖突集,分別是AB(M1)∨AB(M2)∨AB(A1)和AB(M1)∨AB(M3)∨AB(A1)∨AB(A2)。
求解問題的第二步是候選產生,即利用第一步所產生的沖突集,找出可能的診斷解。一個候選(Candidate)就是一個特定的假設,它表示該假設中元素均已經發生故障。一個候選應該能解釋所有的征兆,因而它必須能解釋每一個沖突,即與每一個沖突有一個非空的交集。候選空間是與當前測量相容的候選集合,在沒有測量之前,候選空間為被診斷對象的所有元素的冪集空間。根據圖9中b)獲得的沖突集產生的候選為AB(M1)∨AB(A1)。
4 PHM系統仿真驗證框架
PHM驗證通常包括各系統的運行模擬、故障注入、數據傳輸、存儲、處理模擬等諸多過程,另外,為了能夠充分利用機上的計算、存儲、總線資源,PHM通常都是分布式的,PHM的驗證具有一定的難度。筆者設計了一個基于數字化仿真的低成本、小型化的PHM框架,可以從數據視角對PHM系統進行驗證,見圖10。在該框架中,對于PHM架構中存在的控制器、區域級管理器、交叉確認推理機等數據處理部件,采用Windows中的進程予以實現,進程間采用管道、郵槽等形式進行通信,模擬PHM數據在機上的傳輸過程。推理所用的模型運行在推理引擎中。在Saber、AMESim中構建供電分系統、液壓分系統、燃油分系統等各系統仿真模型。通過仿真總線Cosimate,實現Saber、AMESim等之間異構能量耦合,實現控制器與分系統之間的控制和狀態采集。

圖10 基于事件的PHM系統仿真驗證框架
按照這個框架,組建了一個仿真環境,對利用系統建模語言描述的PHM系統進行驗證,也用于基于事件模型的有效性、基于模型推理引擎的有效性、仿真框架的合理性等的驗證。采用的測試用系統如圖11,由6個SSPC構成的配電系統,CMPS={SSPC1,SSPC2,…,SSPC6},系統觀測為4個負載的電壓,OBS={v1,v2,v3,v4},根據系統行為和觀測之間出現的沖突,來推理診斷系統中的各種故障。
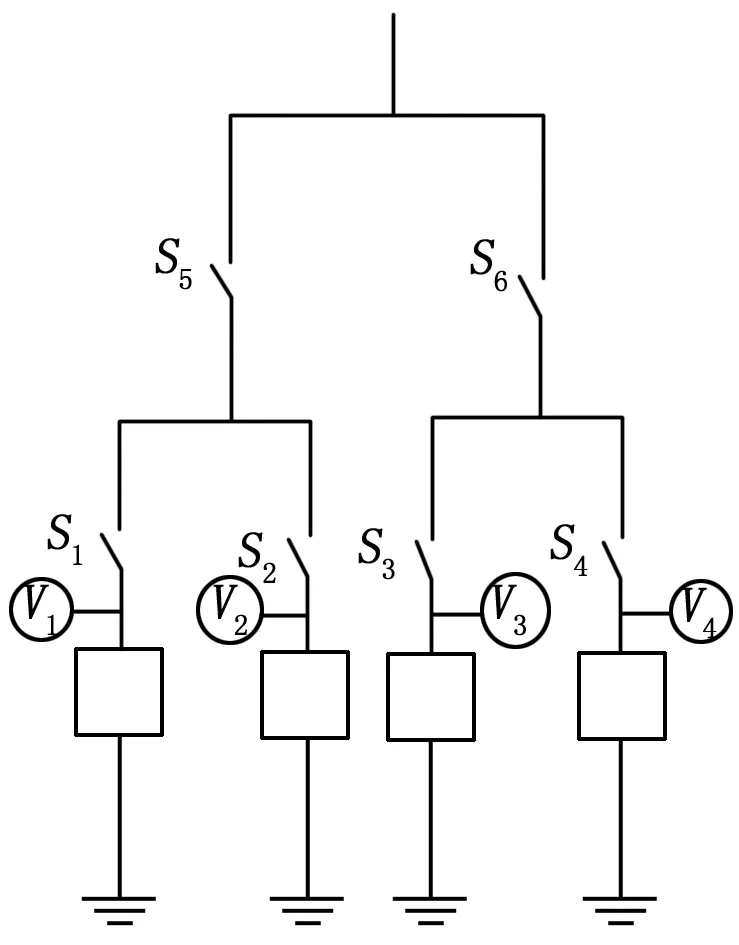
圖11 測試用系統
測試用例1:在發出所有SSPC接通指令后,在Saber中制造一個故障注入,使SSPC4跳閘,這時負載4停止工作,而負載3工作正常。此時,經過推理分析,認為SSPC跳閘,結果如圖12。
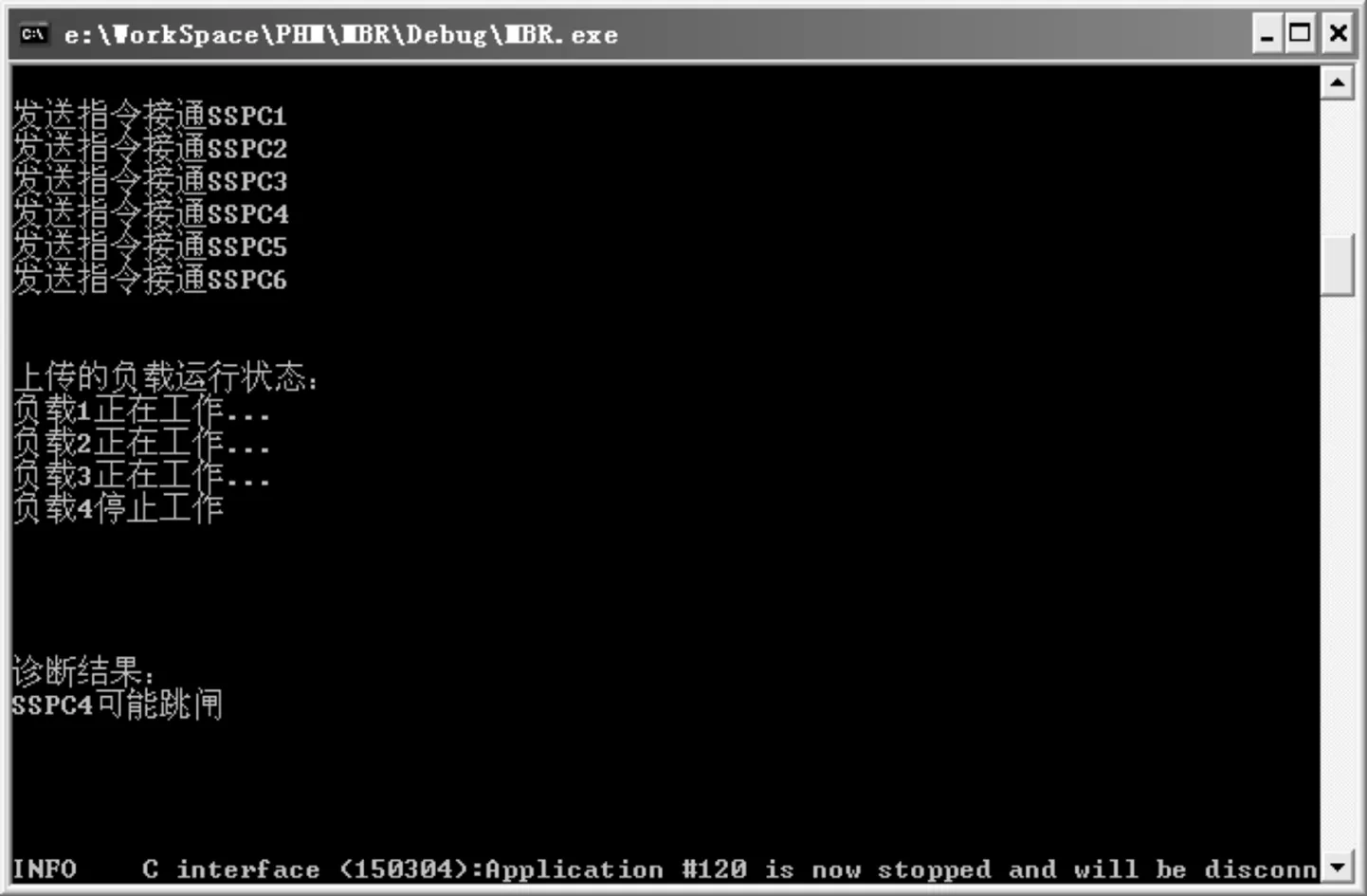
圖12 測試用例1的監測及推理結果
測試用例2:在發出所有SSPC接通指令后,在Saber中制造一個故障注入,使SSPC6跳閘,這時負載3和負載4均停止工作。此時,經過推理分析,懷疑是SSPC3跳閘或SSPC5、SSPC6跳閘或全部跳閘。復位SSPC6,4個負載全部正常工作,推理分析結果為沒有故障。
5 結論
故障預測與健康管理技術在各種安全關鍵系統、高成本系統等工業產品中正在體現出巨大的應用價值。在飛機中應用故障預測與健康管理技術,受到體積、重量、成本等的限制,PHM系統具有耦合程度高、層次化、多領域等特點,使飛機故障預測與健康管理的設計和驗證具有很高的挑戰性。
本文從數據驅動的視角出發,提出了利用系統建模語言(SysML)進行PHM系統設計的方法,并進行了實踐;為了應對大量數據對機上局部資源造成的壓力,提出了利用基于事件的系統模型并結合基于模型的推理的方法,降低了對局部資源產生的壓力;為了實現PHM系統的快速驗證,文中還提出了一種數字化仿真驗證框架。通過本文的研究和實踐,說明上述方法是合理、有效的。
[1] 邵新杰,等. 復雜裝備故障預測與健康管理技術[M]. 北京:國防工業出版社, 2013.
[2] Lenny. SysML Distilled-A Brief Guide to The Systems Modeling Language[M]. Pearson Education,Inc.2013.
[3] 崔子謙. 基于定性模型的衛星電源系統故障診斷方法的研究[D]. 哈爾濱:哈爾濱工業大學, 2007.
[4] Luis Hernandez. A Framework for Developing an EPS Health Management System[J].SAE, 2010:117-123.
[5] Andrew Hess. PHM a Key Enabler for the JSF Autonomic Logistics Support Concept[A]. IEEE Aerospace Conference Proceedings[C]. 2004:3543-3550.
Design and Verification of Aircraft PHM System Under Data-Driven Viewpoint
Liu Liang, Zhou Bo, Yu Tao, Zhang Ning
(Shenyang Aircraft Design and Research Institute, Shenyang 110031,China)
PHM system is a multi-layers, multi-disciplines, high-coupled complex system and hard to be designed and verified as a whole, so there are no mature tools and methods for PHM design and verification. Design and verification of aircraft PHM system is researched from data-driven viewpoint. Four methods are used: 1)System Modeling Language(SysML) could be used for the design of PHM system under Data-Driven Viewpoint; 2)Event-based method could convert the monitored system’s behavior to some states which will utilize resource of PHM system adequately so as to reduce the local resource pressure;3)Model-based reasoning method is introduced and system’s state model is implemented. 4)Eventually, a multi-thread method and a heterogeneous energy-coupled method are used to define a PHM simulation framework under which develops a simulation environment and verifies mentioned methods, and some test cases of power distributing system are developed for reasoning. The result of research shows that methods mentioned above are valid and could be used for construction of PHM system architecture completely and resource-balanced.
PHM; Sysml; model-based reasoning; verification framework
2016-11-17;
2017-02-13。
劉 亮(1984-),男,遼寧阜新人,碩士研究生,工程師,主要從事飛機電氣系統故障預測與健康管理、飛機電氣控制系統設計、系統混合信號仿真、系統工程實踐研究等方向的研究。
1671-4598(2017)07-0016-05
10.16526/j.cnki.11-4762/tp.2017.07.004
TP277
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41