基于相關性原理起重機負載電機監測系統設計
2017-08-30 00:01:21呂金龍黃細霞吳曉越
計算機測量與控制 2017年7期
呂金龍,黃細霞,吳曉越
(上海海事大學 航運技術與控制工程交通行業重點實驗室,上海 201306)
基于相關性原理起重機負載電機監測系統設計
呂金龍,黃細霞,吳曉越
(上海海事大學 航運技術與控制工程交通行業重點實驗室,上海 201306)
對起重機負載電機進行了研究,采用西門子公司的S7-200 SMART PLC采集負載電機的機械振動信號,通過工業Wi-Fi無線模塊以無線數據包的形式將采集的數據匯總到上位機LabVIEW監測平臺;上位機的LabVIEW監測平臺對電動機振動信號進行相關性和頻譜分析,將實時振動數據頻譜信號和已知常見負載電機的軸承外圈故障、軸承內環故障和滾子故障3種典型的故障狀態頻譜信號進行相關性運算,得到實時信號與已知狀態的相關系數;提出了以相關系數作為故障診斷判定閾值的方法進行故障診斷,實現了對起重機狀態進行監測以及監控信息發布。
起重機;狀態監控;相關性原理;工業無線;故障診斷
0 引言
隨著工業化不斷推進,作為主要工業設備的工業起重機被廣泛應用于車間、港口碼頭、電站、海上鉆井平臺、高層建筑等場所。。傳統起重機存在諸多不足之處,為了適應工業發展,要求起重機安全可靠、先進、快速、精確定位及運行平穩,同時趨向大噸位、高效率、自動化、智能化及多用途方向發展。作為生產作業的重要裝卸設備,起重機逐漸呈現設備大型化、生產效率高、技術復雜和作業連續性強等特點,其運行狀態的好壞直接影響著國民生產效率和經濟效益[1-2]。遠程監控技術廣泛應用于工業生產現場設備分布零散或數據不易采集的場合,實施及時地監視設備的運行狀態并進行有效控制。利用可編程控制器PLC模塊以及人機交互模塊等為操作人員提供更直觀、全面的系統工作參數和狀態信息,進而提高整機控制技術水平和應用效率,具有圖形化、交互式顯示、監測及智能診斷等功能,實現整個體系的集中診斷接口以及安全監控,可大大降低勞動成本,提高生產效率[3-4]。
傳統起重機狀態檢測通過人工、定時、定點的方法完成,檢測手段簡單、狀態評估依靠人工經驗。近年來隨著人工智能的不斷發展,一些學者利用人工神經網絡理論對起重機機械系統工作狀態進行智能監測和故障診斷,快速確定故障類型,提高了故障診斷率[5]。工業網絡技術快速發展,采集起重機的各種電控系統的信號或信息,實現起重機電控系統的全面計算機圖形化監控、故障監控和跟蹤;通過遠程服務和遠程監控手段,可以實現快速服務響應,極大提高設備故障排除時間,保障設備工作效率[6-7]。國外公司如B&N公司、亞特蘭大公司、IRD公司、日本的安川公司和住友公司利用移動通信技術、智能傳感技術以及超高速交換路由技術等技術開發了一些高性能的起重機狀態監測系統[8]。國內一些科研單位及高等院校如上海交通大學、華中科技大學等相繼研制了多種起重機狀態監測和故障診斷系統[9-10]。為確保起重設備的安全運行,提高起重機的使用壽命和利用率,從起重機的歷史數據中找到起重機運行的客觀規律,為起重機的現代化管理提供可靠的依據成為現代化起重機狀態監測的新方向[11-12]。
振動監測是起重機狀態監測與故障診斷的重要方法[13]。本文提出一種將振動頻譜分析和相關性原理相結合應用于起重機的狀態監測與故障診斷系統設計了起重機負載電機無線遠程狀態監測系統。
1 理論基礎
1.1 FFT頻譜分析方法
快速傅里葉變換 (FFT)是實現離散傅里葉變換 (DFT)的快速算法,它利用旋轉因子w的周期性和對稱性,使N點DFT的乘法計算量由N次降為(N/2)log2N次,設X(n)是長為N的復序列,其中DFT定義為:

(1)


(2)
(3)
因此可得:
(4)

所以, 公式(2)可表示為:

(5)
其中:
由于,均為N/2點的DFT。公式(3)只能確定出X(k)的k=0,1,2,…,N/2-1個,即前一半的結果。
(8)
所以:

(9)
可見,X(k)的后一半,也完全由,的前一半所確定。N點的DFT可由兩個N/2點的DFT來計算,這種方法使工程計算更加簡單,用于工業控制計算實時性更高。
1.2 相關性理論
互相關函數反映的是兩個隨機過程不同時刻變量之間的相互關系,通俗地講,就是兩個信號不同時刻之間的互相關系。動態函數x(t)和y(t)的互相關函數Rxy(τ)定義為:
(10)
互相關函數在實際應用中,可以用來排除噪聲干擾,提取感興趣的有用信息,檢測出有用的信號。對有限長序列,常用式:
(11)
來估計互相關函數相應的相關系數:
(12)
根據實時振動信號經過FFT變換后的信號頻譜特征,通過計算實際振動頻譜信號和樣本振動頻譜信號間互相關系數。每個樣本振動頻譜所對應的電機狀態通過實驗已經知道,作為狀態診斷的參考樣本。通過比對振動頻譜信號和每個樣本振動頻譜互相關系數,與所對應的振動樣本信號互相關系數越大,則實際電機狀態與樣本此時的電機狀態越接近,以此來監測電機的狀態和故障類型。
2 系統設計
2.1 系統總體結構
本文設計的起重機負載電機的狀態監測系統包括狀態數據信息采集單元、無線通訊傳輸單元和上位機LabVIEW監測平臺三部分。系統總體結構如圖1所示。
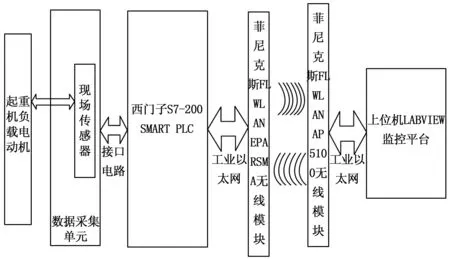
圖1 系統總體結構框圖
現場傳感器采集起重機負載電機的各個狀態信息,將采集的起重機負載電機的狀態信息存儲到西門子S7-200 SMART PLC設定的存儲器中,PLC通過其工業以太網接口由菲尼克斯FL WLAN AP5100無線模塊與FL WLAN EPA RSMA 無線模塊以無線的方式將數據傳輸到上位機LabVIEW監測平臺,上位機LabVIEW監測平臺顯示起重機負載電機的狀態信息、故障信息以及信息的發布等。
2.2 監測系統硬件單元
2.2.1 起重機負載電機振動信號檢測單元
本文采用無錫世敖科技有限公司生產的SA-CV-100速度傳感器,SA-CV-100速度傳感器為兩線制一體化振動變送器,內置壓電加速度型振動速度傳感器。經過精密高的集成內置電路,將速度峰值或者有效值轉換為標準型的0~5 V電壓信號。
2.2.2 PLC現場控制和數據轉換單元
本文選用SIEMENS公司S7-200 SMART型PLC,其CPU模塊配有工業以太網端口進行,通過以太網接口與上位機進行通訊。PLC與現場檢測站的各個檢測傳感器相連接,并且作為監測系統的現場控制站。本文上位機LabVIEW采用西門子提供的SMART ACCESS提供的OPC驅動和PLC進通信。選擇S7-200 SMART型PLC擴展模塊EM231作為模擬量采集模塊,EM231模擬量輸入單元有4路模擬量輸入點,分辨率為12位A/D轉換器。
2.2.3 工業Wi-Fi無線數據單元
本文選用由菲尼克斯公司生產的FL WLAN AP 5100無線網關與FL WLAN EPA RSMA 無線終端模塊。菲尼克斯無線模塊支持無線局域網802.11標準,FL WLAN AP 5100與FL WLAN EPA RSMA 無線模塊支持工業以太網協議有線通信。可以通過基于Web的網絡管理模式和簡單網絡管理協議對菲尼克斯無線模塊進行配置。
2.3 監測系統軟件單元
將菲尼克斯FL WLAN AP 5100無線模塊和FL WLAN EPA RSMA無線模塊通過有線以太網與上位機連接,進行無線模塊的設置。
首先在上位機端將FL WLAN 5100的IP地址設置為192.168.0.254,點擊Configuration即可進入設置界面。
在FL WLAN 5100設置為AccessPoint,并設置SSID名稱,設置Wlan band 為2.4 GHz。在Client端與FL WLAN 5100相同設置,就可以進行無線通訊。
2.3.1 振動采集軟件設計
振動PLC采集軟件流程圖如圖2所示。
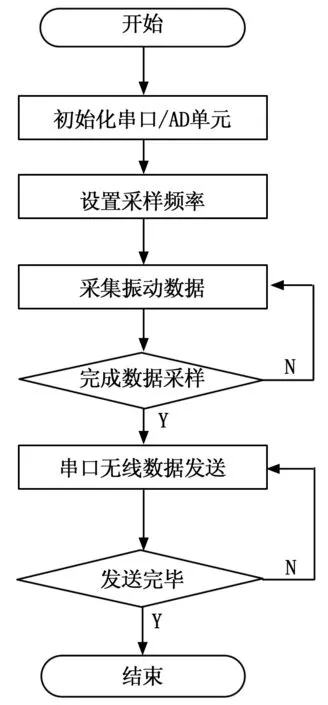
圖2 振動采集單元流程框圖
程序開始首先初始化PLC掃描時鐘和輸入接口。將振動傳感器采集起重機核心機電設備電動機的振動數據信息保存于PLC相應地寄存器,然后通過PLC的工業以太網接口將數據傳送給菲尼克斯FL WLAN EPA RSMA無線模塊,菲尼克斯FL WLAN EPA RSMA無線模塊通過無線方式將起重機核心機電設備電動機的振動數據傳送給菲尼克斯FL WLAN AP 5100無線模塊,菲尼克斯FL WLAN AP 5100無線模塊與上位機LabVIEW通過串口連接,接收菲尼克斯FL WLAN AP 5100無線模塊傳送的電動機振動數據,并且分析處理數據和顯示起重機電機的振動信息。
2.3.2 監控平臺LabVIEW程序設計
為了方便用戶查看起重機的狀態信息,在上位機上使用LabVIEW軟件編寫了監控界面。起重機狀態監測界面的功能主要包括:1)系統設置:包括時間的設定、各個串口通訊的設定、信號采樣頻率的設定、文件操作、命令控制等;2)實時數據:系統中各個傳感器所采集到的各種數據、各個傳感器的狀態信息等;3)狀態信息曲線:各個傳感器采集數據波形的實時呈現、電動機不同狀態的顯示等;4)系統信息:存儲并顯示起重機狀態的歷史信息數據、進行的操作和軟件信息;5)給用戶提供使用方法的幫助信息, LabVIEW數據采集程序框圖如圖3所示。
通過上位機LabVIEW監測軟件,可以監測到各個傳感器的狀態和傳感器采集到的信息,還可以通過其他終端來訪問后臺的服務器[14-15],查看起重機核心機電設備的狀態信息。
3 實驗結果與分析
本實驗主要完成以下內容:首先完成正常和典型故障振動信號檢測;在上位機LabVIEW監測平臺中完成振動信號的頻譜相關性分析,最后完成上位機LabVIEW監測平臺對起重機狀態信息的發布。
3.1 振動信號的檢測及分析處理
在起重機電機故障中,以滾動軸承的故障為最常見的故障。本實驗以滾動軸承中最常見的故障是軸承外圈故障、軸承內環故障和滾子故障3種典型的故障作為研究對象[16]。在電機運行期間所采集3種故障振動數據。
在這本實驗中測量垂直方向的振動信號在正常,在軸承外圈故障,軸承內部故障和滾子故障的每個狀態中的原始振動信號圖4所示,測定在一個恒定速度(500 rpm)。信號測量的采樣頻率是2 kHz,和采樣時間是20 s。
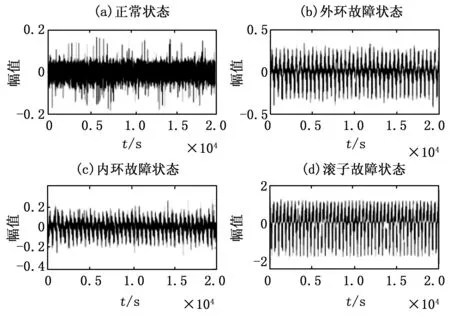
圖4 4種狀態的原始振動信號
3.2 振動信號頻譜分析
通過FFT頻譜方法分析各種狀態下振動信號的時頻分布,根據每個狀態的頻譜分布,得出每個狀態的頻譜特性,為故障診斷提供特征依據。電動機振動信號經過FFT變換到頻率域中,將會得到更多的電機振動信號的詳細信息[17]。
在滾動軸承發生故障時,故障部件振動信號頻譜的出現在軸承的固有頻率區域。圖5給出在正常,軸承外圈故障,軸承內環故障和滾子故障的每個狀態(本文給出轉速500 rpm)所對應頻譜特性曲線。
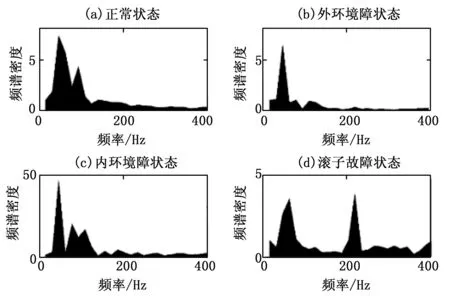
圖5 每個狀態FFT頻譜圖
從圖5中,正常狀態頻譜集中在50 Hz領域;外環故障頻譜集中在50 Hz和100 Hz領域;內環故障頻譜集中在50 Hz、70 Hz和100 Hz領域;滾子故障頻譜集中在50 Hz和200 Hz領域。故障狀態頻譜范圍在60 Hz至200 Hz;即,如果軸承處于異常狀態振動信號的頻譜范圍從約60 Hz至200 Hz,這些特征譜可以用于軸承的狀態診斷。
3.3 基于相關性原理故障分析
根據振動信號FFT變換后的頻譜特性為特征信號,將實時振動數據頻譜信號和已知狀態(正常,軸承外圈故障,軸承內環故障和滾子故障)頻譜信號進行相關性運算,根據1.1節相關性理論得到實時信號與已知狀態的相關系數,以相關系數為故障診斷判定閾值,進行故障診斷。
以軸承外圈故障為例,分析以相關系數為故障診斷判定閾值,進行故障診斷。圖6為其中一組實時數據:
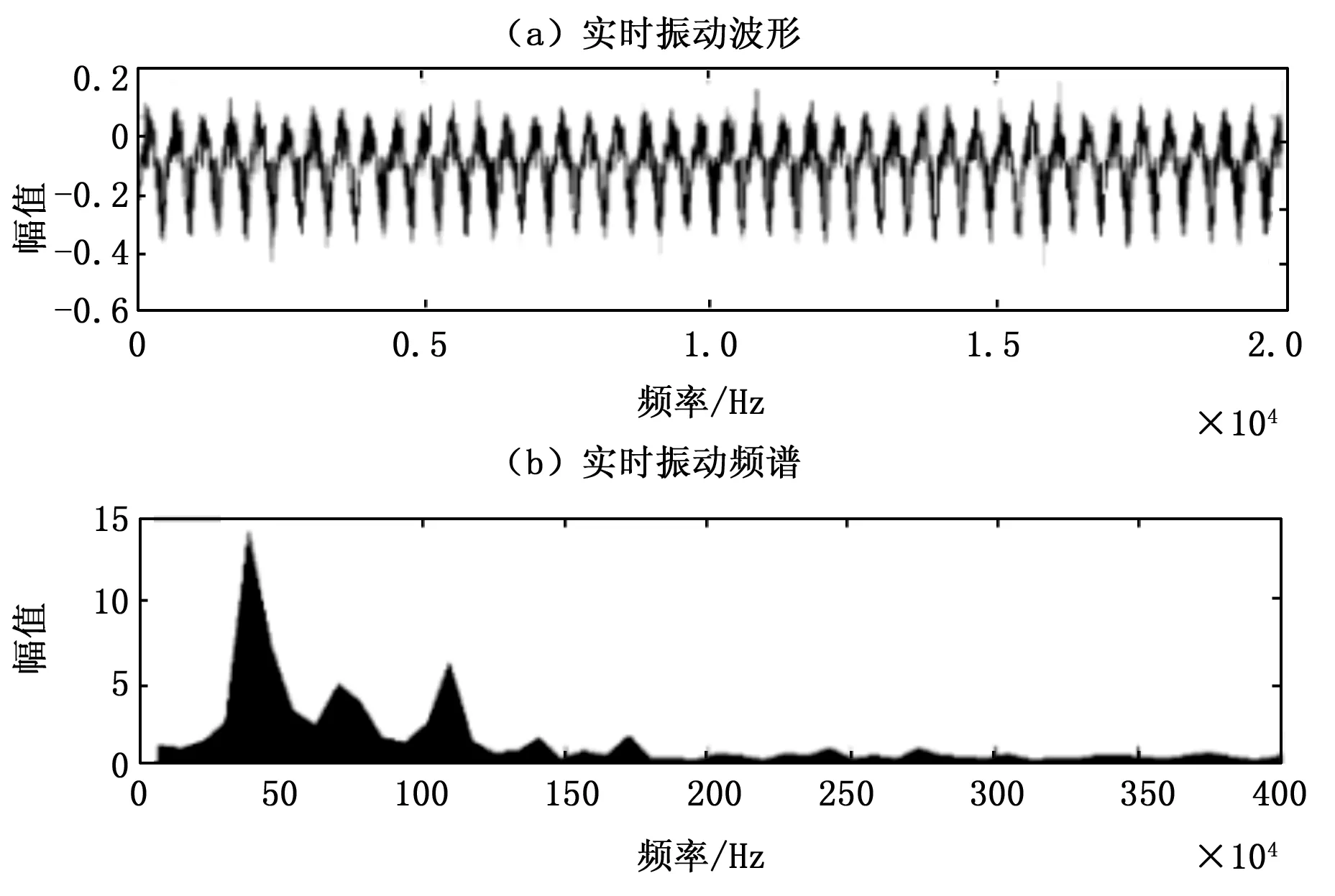
圖6 實時數據(已知故障狀態)
在電機轉速在500 rpm平穩運行時,本文采集四十組實時故障數據(已知外環故障狀態)作為故障診斷訓練樣本數據,進行閾值訓練實驗,確定所處故障狀態的閾值范圍。圖7為軸承外圈故障與已知狀態相關系數閾值分布。
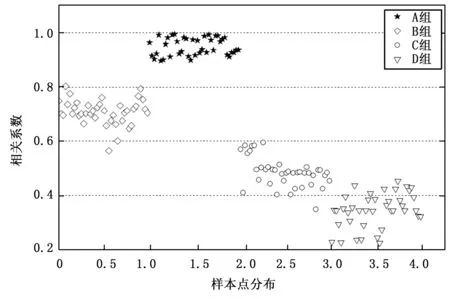
圖7 訓練故障數據、正常和故障狀態相關系數分布
從圖中可以看出,軸承外圈故障和其具有相同故障狀態頻譜相關系數分布在以0.948為中心的簇,相關系數范圍在0.903~0.992區間。軸承外圈故障和其他狀態的頻譜相關系數分布也都有明顯的差別,可以理解為都有各自簇中心,狀態相關系數分布區分明顯。其中圖7中A組、B組、C組和D組是訓練故障數據與外圈故障相關系數分布、正常狀態相關系數分布、內環故障相關系數分布和滾子故障相關系數分布。A組、B組、C組和D組是四十組實時故障數據相關系數和相關系數中心點如表1所示。
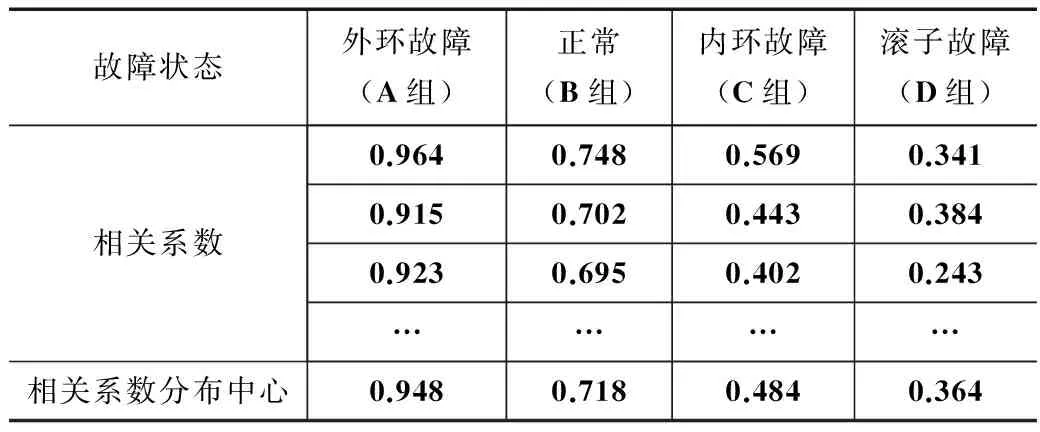
表1 A組、B組、C組和D組相關系數分布
本文選取十五組未經訓練的實時故障數據(已知外圈故障狀態)作為故障診斷訓測試樣本,檢驗采用振動頻譜信號相關系數為故障診斷判定閾值,進行故障診斷的可行性和準確性。測試數據狀態診斷結果如圖8所示。
從圖中可以看出,若以相關系數0.9為故障診斷閾值,則十四組測試結果為外圈故障狀態;一組相關系數在小于0.8,診斷為其他狀態,與已知測試為外圈故障狀態相矛盾。可以得出測試結果正確率為95%。以相關系數0.9為故障診斷閾值,根據相關系數閾值分布與訓練樣本數據相關系數分布,可以診斷其他3種狀態的正確率。如表2,為測試數據診斷結果的正確率:
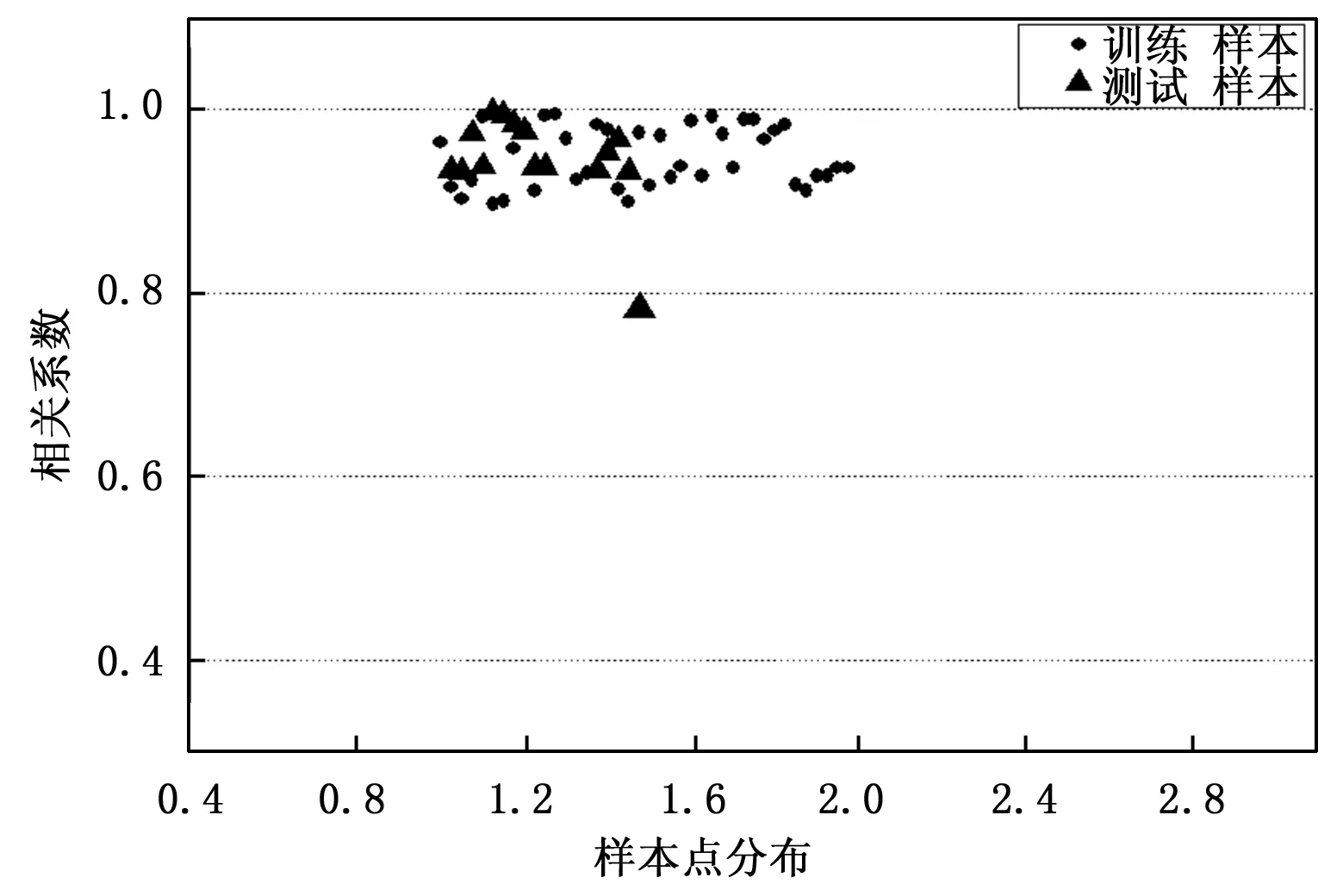
圖8 測試數據狀態診斷結果

故障狀態正常外圈故障內環故障滾子故障正確率100%95%100%95%
由表2可以知,由本方法得到故障診斷正確率為97.5%,絕大部分故障狀態都能夠準確判斷出來,可以采用相關系數作為故障診斷判定閾值,進行故障診斷。
4 結論
本文將頻譜分析和相關性原理相結合應用于起重機的狀態監測與故障診斷系統中,以工業無線形式將采集的信號量匯總到上位機LabVIEW監測中心,解決了起重機各部分可能出現故障分散,有線的方式進行信號匯集不便且不易擴展的問題。同時對起重機核心機電設備電動機的振動采集分析,分析起重機負載電機振動的諧波含量,并在上位機LabVIEW監測平臺上完成信息數據的發布,實驗驗證了基于相關性原理的起重機負載電機機械震動信號無線遠程監測系統檢測方法的有效性,使得相關人員能方便及時的了解起重機系統的運行狀態。為今后可以對更加復雜的狀態參數和故障狀態進行分析,并采用人工智能的算法進行故障分析和分類奠定基礎。
[1] 石萬祥, 周 強. 門機振動監測技術的探討[J]. 港口裝卸, 2002(3):19-20.
[2] 王國峰, 周亦武, 秦建春. 港口裝卸機械動態監測系統的研究[J]. 測控技術, 2002, 21(9):36-38.
[3] Slutej A, Kolonic' F, Slutej A. Advances in Control and Sensors Technology Enabling Unmanned Operation of Containers Cranes[J]. EDPE 2005. Abstract and Proceedings Program. CD-ROM / Zvonko Bencˇic', 2005.
[4] 屈福政, 孫鐵兵, 牛治剛,等. 大型起重機的智能化電子控制系統[J]. 起重運輸機械, 2004(3):25-27.
[5] 張 健, 芮延年, 陳 潔. 基于人工神經網絡理論起重機機械系統故障監測與診斷[J]. 機電一體化, 2005, 11(6):41-44.
[6] 王志欣, 胡 雄, 陳兆能. 集裝箱起重機運行狀態遠程監測評估技術研究[J]. 武漢理工大學學報, 2006, 28(4):101-104.
[7] 王鳳萍, 程 磊, 孫 影. 國內外履帶式起重機的現狀及發展趨勢[J]. 工程機械, 2006, 37(4):39-43.
[8] 王小明, 盧志強. 國內外大型起重機的研究現狀及發展趨勢[J]. 機電產品開發與創新, 2009, 22(2):6-7.
[9] 張 華, 張志勝, 伏明明,等. 設備遠程監控系統的設計與實現[J]. 中國制造業信息化, 2008, 37(13):46-48.
[10] 王 超. 起重機行業發展綜述[J]. 工程建設, 2011, 43(5):50-53.
[11] 楊海濱. 大型履帶式起重機遠程狀態監測系統智能終端的設計與實現[D]. 上海:上海交通大學, 2008.
[12] Lv X L, Li J. Fault diagnosis and self-restore fault-tolerant control for systems with state delays[A]. 2009 Chinese Control and Decision Conference[C]. Guilin, 2009, 902-907.
[13] 李帥毅. 門座起重機振動監測系統研究[J]. 港口裝卸, 2013(3):18-20.
[14] 閆淑娟. 基于LabVIEW的振動信號測試分析系統的研究[D]. 沈陽:東北大學, 2009.
[15] 曾素瓊,黃華杰. 基于單片機和LabVIEW的無線火災監測系統設計[J]. 計算機測量與控制,2015,23(1):43-45.
[16] Li K, Chen P, Wang H. Intelligent Diagnosis Method for Rotating Machinery Using Wavelet Transform and Ant Colony Optimization[J]. IEEE Sensors Journal, 2012, 12(7):2474-2484.
[17] 李 婷, 盧卯旺, 龍詩頤. 電機振動的頻譜分析[J]. 湖南科技學院學報, 2005, 26(11):39-41.
Crane Load Monitoring System Design Based on Principle of Correlation
Lü Jinlong,Huang Xixia, Wu Xiaoyue
(Ministerial Key Laboratory of Marine Technology and Control Engineering, Shanghai Maritime University,Shanghai 201306, China)
This paper proposes the use of Siemens S7-200 Smart PLC to collect mechanical vibration signals of rolling bearings for the crane load motor by Phoenix industrial Wi-Fi wireless module to send the collected data in the form of wireless packet data summary to the PC monitoring center. The correlation and spectrum analysis of the motor vibration signal are carried out by the LabVIEW monitoring platform of the host computer. The real-time vibration data spectrum signal and three typical fault state spectrum signals of known common bearing outer ring failure, inner ring fault and roller failure are carried out by correlation method. The correlation coefficient is used as the fault diagnosis threshold to diagnose the fault, and the state of the crane is monitored and the information of the monitoring is released.
crane; condition monitoring; industrial wireless; correlation; fault diagnosis
2017-01-06;
2017-02-06。
國家自然科學基金(51209134)。
呂金龍(1991-),男,安徽太和人,碩士研究生,主要從事檢測技術及自動化裝置方向的研究。
黃細霞(1975-),女,副教授,上海人,碩士研究生導師,主要從事港航電力傳動與控制、電力電子集成系統建模與控制方向的研究。
1671-4598(2017)07-0043-04
10.16526/j.cnki.11-4762/tp.2017.07.011
TP277
A
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21