排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)特性研究
2017-08-31 15:28:49王成賓
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2017年8期
關(guān)鍵詞:系統(tǒng)
王成賓 權(quán) 龍
(太原理工大學(xué)新型傳感器與智能控制教育部重點(diǎn)實(shí)驗(yàn)室, 太原 030024)
排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)特性研究
王成賓 權(quán) 龍
(太原理工大學(xué)新型傳感器與智能控制教育部重點(diǎn)實(shí)驗(yàn)室, 太原 030024)
針對(duì)傳統(tǒng)泵控差動(dòng)液壓缸系統(tǒng)存在液壓回路復(fù)雜、響應(yīng)慢和能耗大的問(wèn)題,提出了一種排量、轉(zhuǎn)速?gòu)?fù)合控制方法,用1臺(tái)伺服變量泵直接控制差動(dòng)液壓缸。首先,從理論上分析了泵控差動(dòng)缸控制原理,將差動(dòng)缸復(fù)合控制系統(tǒng)分為3個(gè)子系統(tǒng)分別進(jìn)行仿真分析,進(jìn)一步通過(guò)內(nèi)環(huán)排量外環(huán)轉(zhuǎn)速進(jìn)行建模仿真分析,復(fù)合控制下響應(yīng)速度比恒定轉(zhuǎn)速下動(dòng)態(tài)特性好。在此基礎(chǔ)上搭建試驗(yàn)臺(tái),對(duì)泵控差動(dòng)缸進(jìn)行試驗(yàn)分析,在內(nèi)環(huán)排量外環(huán)轉(zhuǎn)速控制下較恒定轉(zhuǎn)速下差動(dòng)缸系統(tǒng)動(dòng)態(tài)響應(yīng)快,時(shí)間縮短13.4%;將變量泵處于恒壓控制模式下,對(duì)伺服電機(jī)輸入能耗進(jìn)行測(cè)量,在不同轉(zhuǎn)速和負(fù)載壓力下進(jìn)行試驗(yàn),低轉(zhuǎn)速大排量下系統(tǒng)能耗可以減少3 kW左右。通過(guò)仿真和試驗(yàn),結(jié)果表明,排量、轉(zhuǎn)速?gòu)?fù)合控制模式下,可有效提高泵控差動(dòng)缸系統(tǒng)的響應(yīng)速度,降低能耗。
泵控差動(dòng)缸; 復(fù)合控制; 電液伺服控制; 伺服變量泵; 永磁式同步電動(dòng)機(jī)
引言
泵控差動(dòng)缸系統(tǒng)相對(duì)于閥控差動(dòng)缸系統(tǒng)沒(méi)有節(jié)流損耗,能源利用率高,但同時(shí)也存在諸如需要平衡兩腔不對(duì)稱流量、系統(tǒng)結(jié)構(gòu)復(fù)雜以及響應(yīng)慢的不足[1-2]。國(guó)外對(duì)泵控差動(dòng)缸系統(tǒng)的研究起步較早,如 Rexroth 公司的FEUSER等[3]、Liebherr公司[4]提出的利用2臺(tái)比例泵變排量控制差動(dòng)缸的方法,IVANTYSYNOVA[5-6]提出采用液控單向閥平衡不對(duì)稱流量,由1臺(tái)變量泵變排量直控差動(dòng)缸方法,簡(jiǎn)化了液壓回路結(jié)構(gòu),甚至能用1臺(tái)泵控制2臺(tái)以上差動(dòng)缸[7-10]。美國(guó)Vickers公司申請(qǐng)了交流伺服電機(jī)驅(qū)動(dòng)定量泵變轉(zhuǎn)速閉環(huán)控制差動(dòng)缸系統(tǒng)的專利[11]。日本Yuken和Nachi公司采用液控單向閥平衡不對(duì)稱流量的泵控差動(dòng)缸制成集成系統(tǒng),并成功應(yīng)用于6-DOF運(yùn)動(dòng)模擬器、壓力機(jī)等領(lǐng)域[12-13]。美國(guó)Moog公司對(duì)采用變轉(zhuǎn)速?gòu)较蛑抿?qū)動(dòng)非對(duì)稱缸應(yīng)用于風(fēng)電變槳、注塑機(jī)、飛機(jī)等的情況做了對(duì)比分析[14]。在國(guó)內(nèi),權(quán)龍等[15-17]一直致力于變轉(zhuǎn)速泵直控差動(dòng)缸系統(tǒng)的研究和應(yīng)用,并對(duì)液壓泵進(jìn)行了深入研究[18-19]。CHEN等[20]對(duì)采用雙變量泵閉式控制的動(dòng)臂液壓缸系統(tǒng)做了研究,并設(shè)置蓄能器和超級(jí)電容儲(chǔ)存動(dòng)臂勢(shì)能。文獻(xiàn)[21]中提出一種利用蓄能器、補(bǔ)油泵和電磁閥組成的補(bǔ)油單元補(bǔ)償差動(dòng)缸不對(duì)稱流量的方法,并應(yīng)用于挖掘機(jī)動(dòng)臂液壓系統(tǒng)中。
上述研究的控制方法均為變排量定轉(zhuǎn)速或定排量變轉(zhuǎn)速控制,系統(tǒng)響應(yīng)速度相對(duì)于閥控系統(tǒng)仍有差距。本文以提高響應(yīng)速度和降低能耗為目的,同時(shí)簡(jiǎn)化控制方法,提出一種排量、轉(zhuǎn)速?gòu)?fù)合控制方法,并對(duì)該方法進(jìn)行建模仿真和試驗(yàn)研究。
1 排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)原理
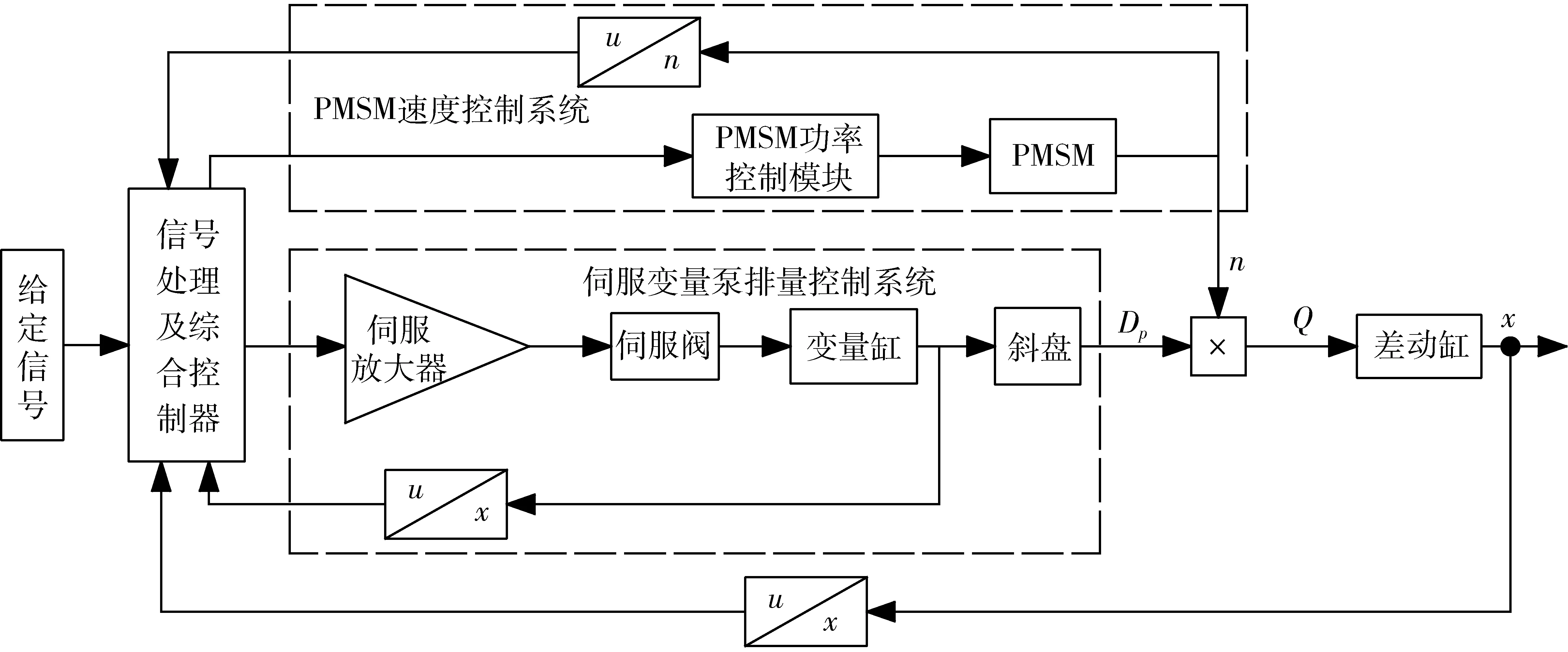
圖2 排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)控制原理框圖Fig.2 System block diagram of pump controlled single rod cylinder with combination of variable displacement and speed
排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)原理如圖1所示。系統(tǒng)主要由永磁式同步電動(dòng)機(jī) (PMSM)、A4VG閉式柱塞伺服變量泵、差動(dòng)液壓缸、液控單向閥、溢流閥、蓄能器、dSpace實(shí)時(shí)控制卡(Real-time control card, RTC)、計(jì)算機(jī)及各種傳感器組成。伺服變量泵的吸油口和排油口直接和差動(dòng)液壓缸兩腔連接,通過(guò)改變泵的流量直接控制差動(dòng)液壓缸的運(yùn)動(dòng)。A4VG閉式泵的變量機(jī)構(gòu)由伺服閥控制對(duì)稱液壓缸系統(tǒng)組成,控制伺服變量泵的排量,與PMSM輸出的轉(zhuǎn)速共同控制伺服變量泵輸出的流量。差動(dòng)缸不對(duì)稱流量由蓄能器通過(guò)液控單向閥平衡。
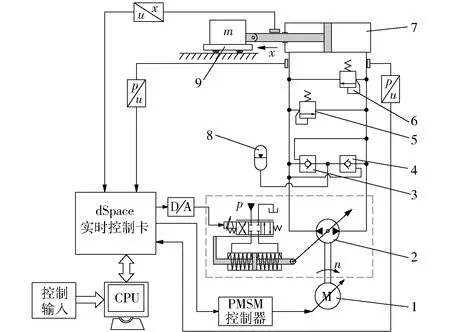
圖1 排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)原理圖Fig.1 Principle diagram of pump controlled single rod cylinder with combination of variable displacement and speed1.永磁式同步電動(dòng)機(jī) 2.A4VG伺服變量泵 3、4.液控單向閥 5、6.溢流閥 7.差動(dòng)液壓缸 8.蓄能器 9.負(fù)載
系統(tǒng)控制原理如下:系統(tǒng)輸入目標(biāo)信號(hào),與反饋信號(hào)比較后,經(jīng)控制器處理生成控制信號(hào)。同時(shí)調(diào)節(jié)伺服變量液壓泵的斜盤傾角及PMSM的驅(qū)動(dòng)電流,控制伺服變量液壓泵排量Dp及轉(zhuǎn)速n,實(shí)現(xiàn)對(duì)伺服變量液壓泵輸出流量Q(nDp)的控制,伺服變量泵輸出的壓力油直接驅(qū)動(dòng)差動(dòng)缸,實(shí)現(xiàn)對(duì)差動(dòng)缸的直接控制。
控制系統(tǒng)可細(xì)分為伺服變量液壓泵排量控制子系統(tǒng)、電動(dòng)機(jī)轉(zhuǎn)速控制子系統(tǒng)和差動(dòng)液壓缸子系統(tǒng),系統(tǒng)原理框圖如圖2所示。
2 差動(dòng)缸系統(tǒng)理論分析
2.1 差動(dòng)缸工況分析
參照?qǐng)D1,差動(dòng)缸系統(tǒng)由差動(dòng)液壓缸、液控單向閥、溢流閥、蓄能器、負(fù)載組成,假設(shè)系統(tǒng)在額定壓力下工作,可忽略溢流閥的影響,則差動(dòng)缸系統(tǒng)可分為4種工況:
(1)活塞桿在液壓油壓力作用下克服外力伸出,無(wú)桿腔壓力大于有桿腔壓力,液控單向閥a打開,不對(duì)稱流量由蓄能器通過(guò)液控單向閥a、液壓泵補(bǔ)償,如圖3a所示。
(2)活塞桿在外力作用下被拉出,有桿腔壓力大于無(wú)桿腔壓力,液控單向閥b打開,不對(duì)稱流量由蓄能器通過(guò)液控單向閥b補(bǔ)償,如圖3b所示。
(3)活塞桿在液壓油壓力作用下克服外力收回,差動(dòng)缸有桿腔壓力大于無(wú)桿腔壓力,液控單向閥b打開,不對(duì)稱流量通過(guò)液控單向閥b向蓄能器充液,如圖3c所示。
(4)活塞桿在外力作用下被壓回,無(wú)桿腔壓力大于有桿腔壓力,液控單向閥a打開,不對(duì)稱流量通過(guò)液壓泵、液控單向閥a向蓄能器充液,如圖3d所示。
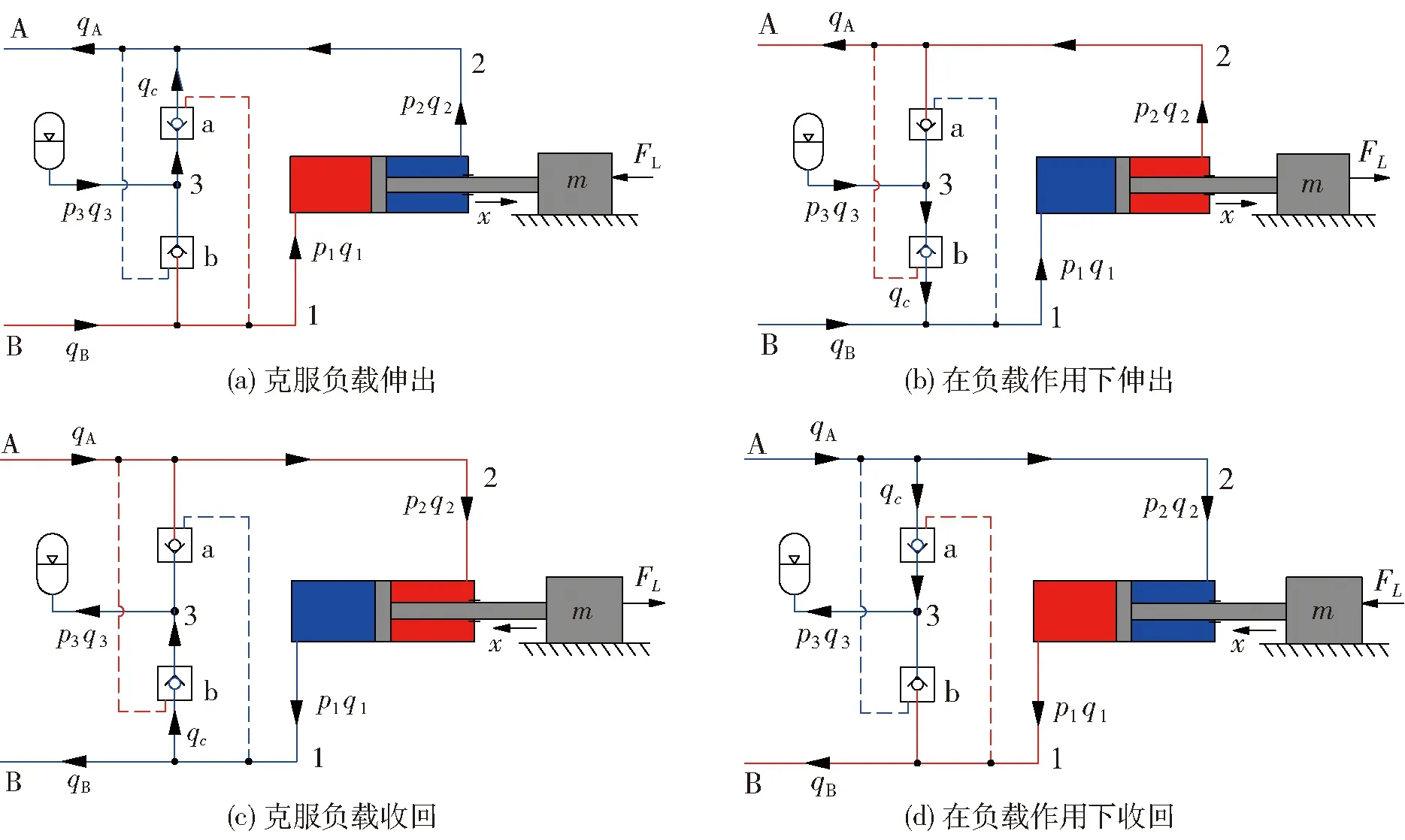
圖3 差動(dòng)缸工作狀態(tài)原理圖Fig.3 Working condition schematic diagram of differential cylinder
2.2 差動(dòng)缸系統(tǒng)數(shù)學(xué)模型
幾種工況下的模型差別不大,以工況1為例進(jìn)行研究。在液壓力作用下,活塞桿克服外力伸出,此時(shí)系統(tǒng)1點(diǎn)壓力大于2點(diǎn)壓力,液控單向閥a打開,b關(guān)閉,不對(duì)稱流量通過(guò)液控單向閥a由蓄能器補(bǔ)償。忽略系統(tǒng)泄漏及由于壓力造成的體積變化,則差動(dòng)缸無(wú)桿腔流量等于有桿腔流量與液控單向閥a的流量之和,即
q1=q2+qc
(1)
式中q1、q2——差動(dòng)液壓缸無(wú)桿腔和有桿腔流量qc——液控單向閥的流量
差動(dòng)缸無(wú)桿腔流量方程式可表示為
(2)
其中
V1=V10+A1x
(3)
式中V10——差動(dòng)缸活塞在中間位置時(shí)無(wú)桿腔容積p1、p2——差動(dòng)缸無(wú)桿腔、有桿腔壓力A1——無(wú)桿腔面積x——差動(dòng)缸位移Ci、Ce——差動(dòng)缸內(nèi)泄漏、外泄漏系數(shù)βe——液壓油彈性模量V1——工作過(guò)程中差功缸無(wú)桿腔容積
假定活塞位移很小,即|A1x|?V10,則
(4)
差動(dòng)缸有桿腔流量方程式可表示為
(5)
其中
V2=V20-A2x
(6)
式中V20——活塞在中位時(shí)差動(dòng)缸有桿腔容積,包括管路容積
A2——差動(dòng)缸有桿腔面積
V2——工作過(guò)程中差功缸有桿腔容積
假定活塞位移很小,|A2x|?V20,則
(7)
差動(dòng)缸力平衡方程式
(8)
式中M——作用在活塞上的總質(zhì)量,包括活塞桿、活塞及負(fù)載質(zhì)量
FL——作用在活塞上的負(fù)載力
B——阻尼系數(shù)K——彈簧剛度
不計(jì)粘性阻尼力及彈性力,其拉氏變換方程式可表示為
(9)
液壓泵吸油口流量方程式可表示為
qA=q2+qc
(10)
液壓泵排油口流量方程式可表示為
qB=q1
(11)
液控單向閥a的流量方程式可表示為
(12)
式中V3——工作過(guò)程中蓄能器體積
若蓄能器預(yù)充氣體壓力為p30,蓄能器體積為V30,蓄能器工作過(guò)程視為等溫過(guò)程,則
(13)
當(dāng)蓄能器體積比較大時(shí),蓄能器氣體初始體積和壓力變化較小,即V30、p30近似為常數(shù),則
(14)
其中
(15)
忽略管路及液控單向閥a的阻力,則p3=p2,液控單向閥a的流量可表示為
(16)
拉氏變換得
qc(s)=-Kacp2(s)
(17)
根據(jù)式(1)~(17)可得到差動(dòng)缸子系統(tǒng)方框圖,如圖4所示。對(duì)于其他3種工況,分析過(guò)程基本相同,此處不再一一描述。
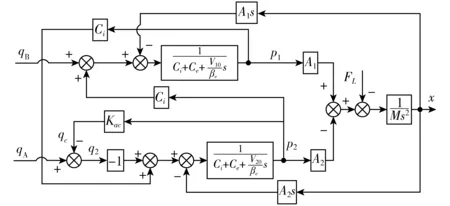
圖4 差動(dòng)缸子系統(tǒng)方框圖Fig.4 Block diagram of differential cylinder subsystem
3 差動(dòng)缸系統(tǒng)建模與仿真
3.1 建模
參照系統(tǒng)原理圖(圖1)和系統(tǒng)控制原理框圖(圖2),組建系統(tǒng)的仿真模型,在仿真軟件中分別建立伺服變量泵排量控制子系統(tǒng)和PMSM轉(zhuǎn)速控制子系統(tǒng)仿真模型,再和差動(dòng)缸子系統(tǒng)模型連接起來(lái)組成排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)仿真模型。伺服變量泵、PMSM及復(fù)合泵控差動(dòng)缸系統(tǒng)仿真模型如圖5所示。參照試驗(yàn)系統(tǒng)設(shè)置仿真參數(shù),相關(guān)主要仿真參數(shù)見表1。
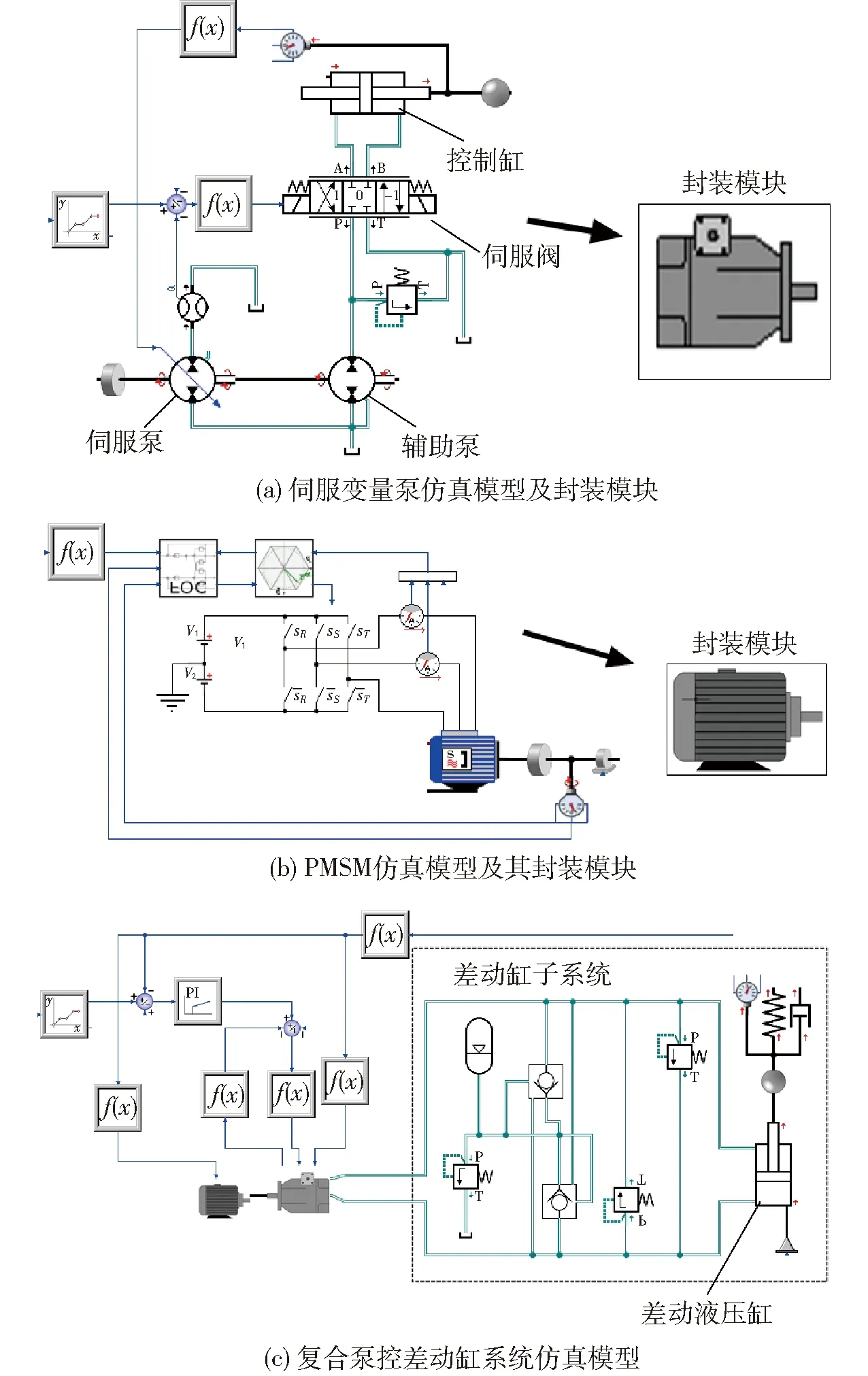
圖5 仿真模型Fig.5 Simulation model
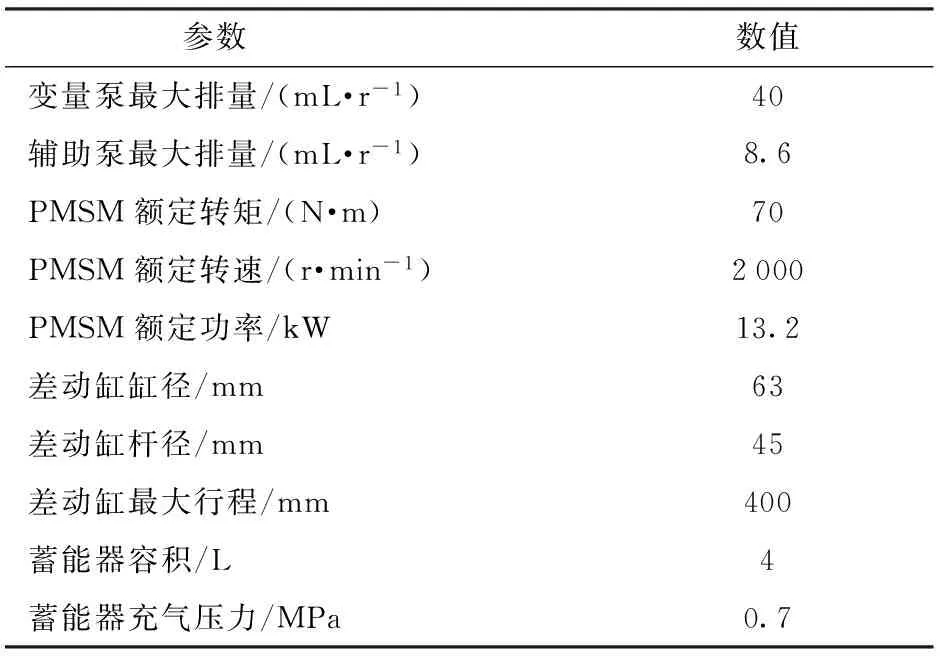
參數(shù)數(shù)值變量泵最大排量/(mL·r-1)40輔助泵最大排量/(mL·r-1)8.6PMSM額定轉(zhuǎn)矩/(N·m)70PMSM額定轉(zhuǎn)速/(r·min-1)2000PMSM額定功率/kW13.2差動(dòng)缸缸徑/mm63差動(dòng)缸桿徑/mm45差動(dòng)缸最大行程/mm400蓄能器容積/L4蓄能器充氣壓力/MPa0.7
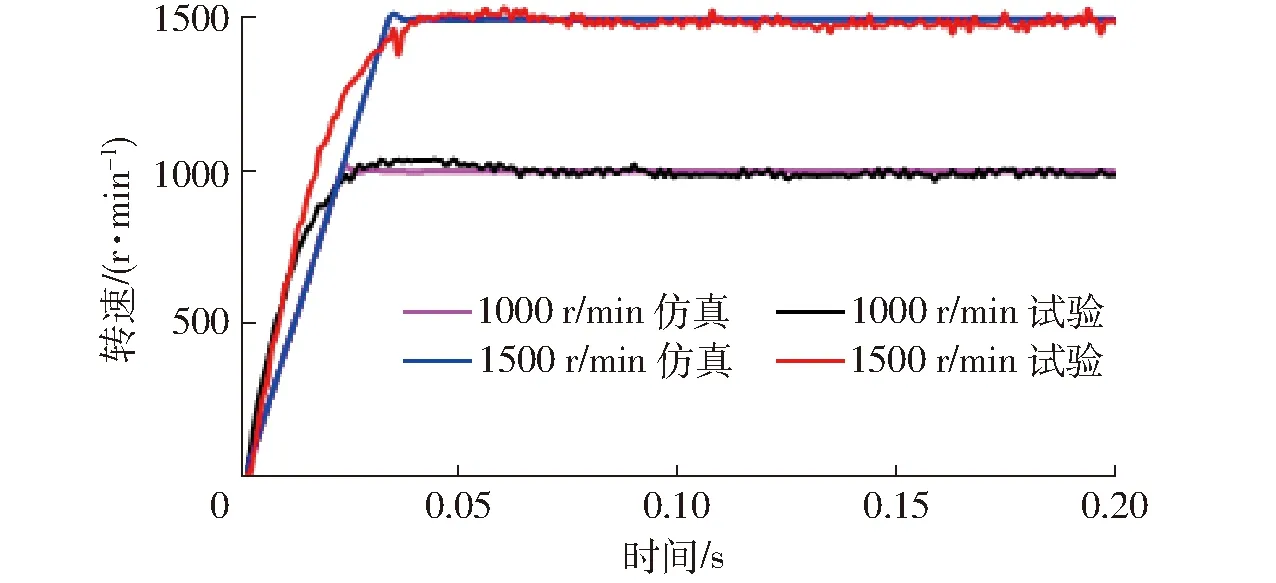
圖6 PMSM轉(zhuǎn)速仿真和試驗(yàn)曲線Fig.6 Simulation and test curves of speed of motor
3.2 PMSM速度特性
對(duì)電動(dòng)機(jī)轉(zhuǎn)速動(dòng)態(tài)響應(yīng)進(jìn)行仿真和試驗(yàn)研究,測(cè)量電動(dòng)機(jī)的階躍響應(yīng)轉(zhuǎn)速曲線。圖6是電動(dòng)機(jī)轉(zhuǎn)速分別為1 000、1 500 r/min時(shí)仿真和試驗(yàn)曲線,由圖6可以看出, 轉(zhuǎn)速1 000 r/min 的響應(yīng)時(shí)間0.023 s,轉(zhuǎn)速1 500 r/min 的響應(yīng)時(shí)間0.030 s,仿真曲線與試驗(yàn)曲線基本一致,實(shí)驗(yàn)結(jié)果驗(yàn)證了仿真模型的正確性。
3.3 伺服變量泵流量
圖7顯示的是變量泵控制電流500 mA,電動(dòng)機(jī)轉(zhuǎn)速在600、1 500 r/min時(shí),泵出口流量仿真和試驗(yàn)曲線。由圖7可以看出,轉(zhuǎn)速600 r/min時(shí),泵最大流量19.5 L/min,響應(yīng)時(shí)間1.15 s;轉(zhuǎn)速1 500 r/min時(shí),泵最大流量44.5 L/min,響應(yīng)時(shí)間1.21 s,試驗(yàn)流量和仿真結(jié)果基本一致,試驗(yàn)結(jié)果驗(yàn)證了仿真模型的正確性。試驗(yàn)流量比仿真流量數(shù)值略小,是因?yàn)樵囼?yàn)時(shí)液壓泵、流量計(jì)等元件泄漏所致。
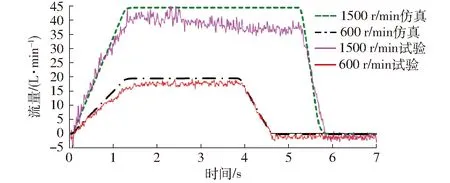
圖7 泵出口流量曲線Fig.7 Simulation and test curves of flow of pump
3.4 排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)仿真
為便于分析研究排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)的動(dòng)態(tài)特性,同時(shí)對(duì)變排量定轉(zhuǎn)速泵控差動(dòng)缸系統(tǒng)的動(dòng)態(tài)特性進(jìn)行研究。仿真時(shí),排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)中電動(dòng)機(jī)最低轉(zhuǎn)速nmin=1 000 r/min,變排量定轉(zhuǎn)速泵控差動(dòng)缸系統(tǒng)固定轉(zhuǎn)速為1 000 r/min,差動(dòng)缸目標(biāo)位移200 mm,分別對(duì)變排量定轉(zhuǎn)速控制和排量、轉(zhuǎn)速?gòu)?fù)合控制進(jìn)行仿真研究。
圖8是復(fù)合控制和變排量定轉(zhuǎn)速控制差動(dòng)缸位移仿真曲線,由圖8可看出,活塞桿伸出200 mm時(shí),復(fù)合控制響應(yīng)時(shí)間為0.95 s,而變排量定轉(zhuǎn)速控制響應(yīng)時(shí)間為1.17 s,復(fù)合控制響應(yīng)時(shí)間縮短0.22 s;活塞桿收回時(shí)復(fù)合控制響應(yīng)時(shí)間為0.70 s,變排量定轉(zhuǎn)速控制響應(yīng)時(shí)間為0.82 s,響應(yīng)時(shí)間縮短0.12 s。圖9是活塞位移200 mm時(shí),復(fù)合控制和變排量定轉(zhuǎn)速控制差動(dòng)缸速度仿真曲線,當(dāng)活塞桿伸出時(shí),復(fù)合控制最大瞬時(shí)速度為360 mm/s,而變排量定轉(zhuǎn)速控制最大瞬時(shí)速度為213 mm/s;活塞桿收回時(shí),復(fù)合控制最大速度為533 mm/s,變排量定轉(zhuǎn)速控制最大速度為423 mm/s。由圖8、圖9可看出變排量、變轉(zhuǎn)速?gòu)?fù)合控制比變排量定轉(zhuǎn)速控制響應(yīng)時(shí)間縮短將近14%,響應(yīng)速度明顯提高。即,可通過(guò)在排量控制信號(hào)上疊加轉(zhuǎn)速控制信號(hào)的方法,快速控制泵輸出流量,以提高差動(dòng)缸響應(yīng)速度。
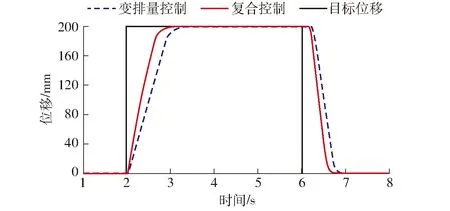
圖8 復(fù)合控制和變排量定轉(zhuǎn)速控制差動(dòng)缸位移仿真曲線Fig.8 Simulation curves of displacement of cylinder under compound control of VDVS and control of VDCS
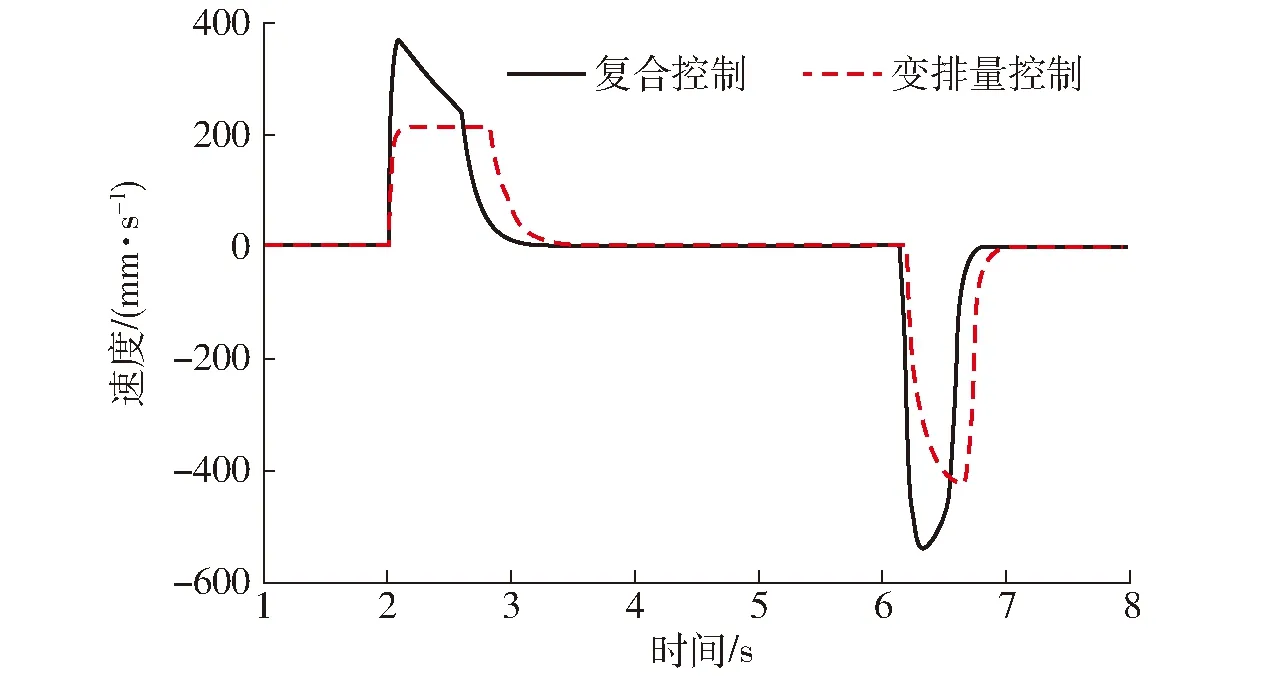
圖9 復(fù)合控制和變排量定轉(zhuǎn)速控制差動(dòng)缸速度仿真曲線Fig.9 Simulation curves of speed of cylinder under compound control of VDVS and control of VDCS
圖10為復(fù)合控制,活塞設(shè)置位移200 mm時(shí),電動(dòng)機(jī)的轉(zhuǎn)速仿真曲線,在活塞桿伸出時(shí),電動(dòng)機(jī)最大瞬時(shí)轉(zhuǎn)速為1 858 r/min,活塞桿收回時(shí),電動(dòng)機(jī)最大瞬時(shí)轉(zhuǎn)速為1 824 r/min。當(dāng)活塞位移達(dá)到設(shè)定位置時(shí),電動(dòng)機(jī)以最低允許轉(zhuǎn)速運(yùn)行。設(shè)定不同的活塞位移,復(fù)合控制活塞位移仿真曲線如圖11所示。由圖11可看出,響應(yīng)時(shí)間基本和輸出位移成正比。
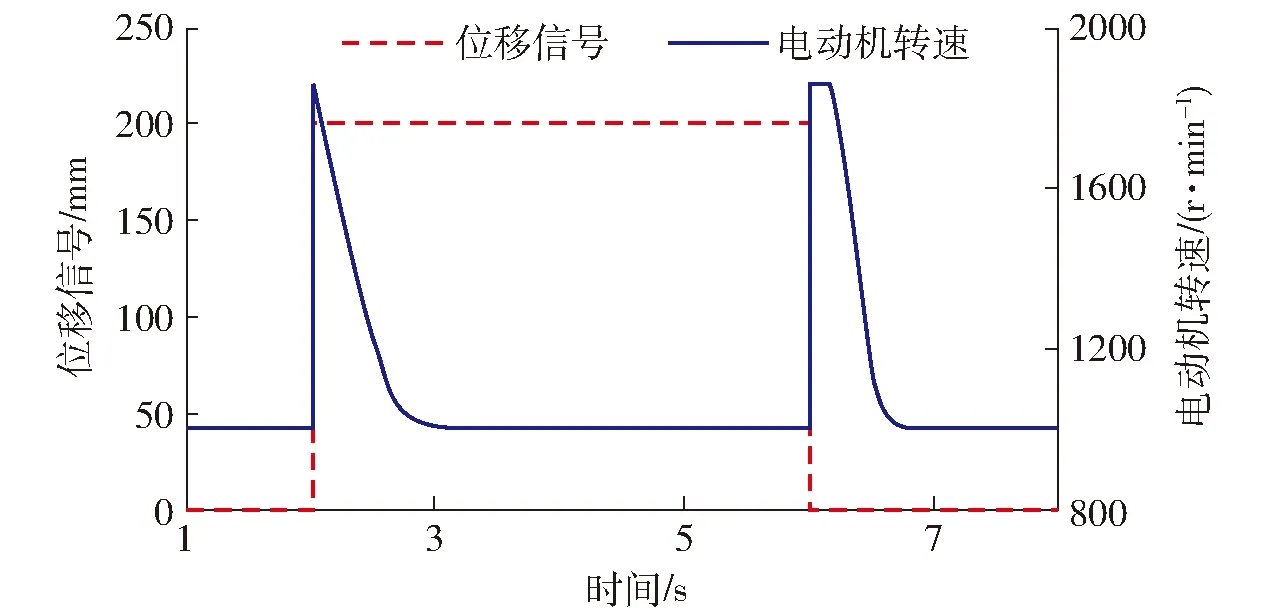
圖10 復(fù)合控制電動(dòng)機(jī)轉(zhuǎn)速仿真曲線Fig.10 Simulation curve of motor’s speed with compound control
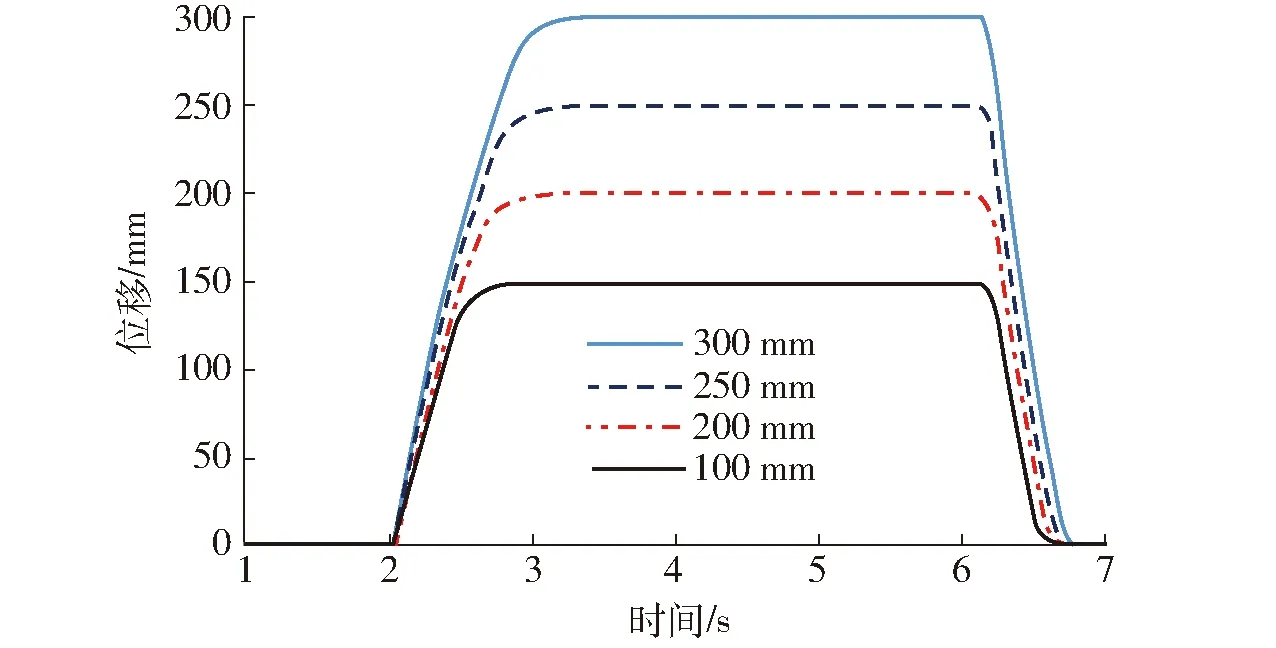
圖11 復(fù)合控制差動(dòng)缸不同位移仿真曲線Fig.11 Simulation curves of displancement of piston rod under compound control
4 差動(dòng)缸系統(tǒng)動(dòng)態(tài)特性試驗(yàn)
4.1 特性試驗(yàn)
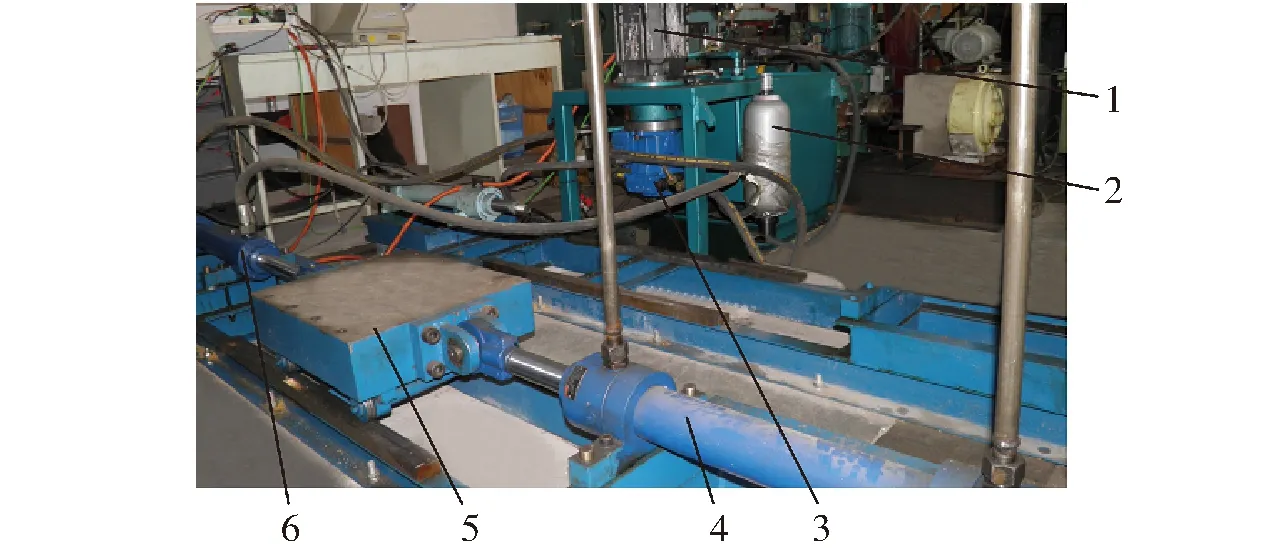
圖12 試驗(yàn)現(xiàn)場(chǎng)照片F(xiàn)ig.12 Picture of test site1.PMSM 2.蓄能器 3.A4VG泵 4.加載缸 5.質(zhì)量塊 6.差動(dòng)缸
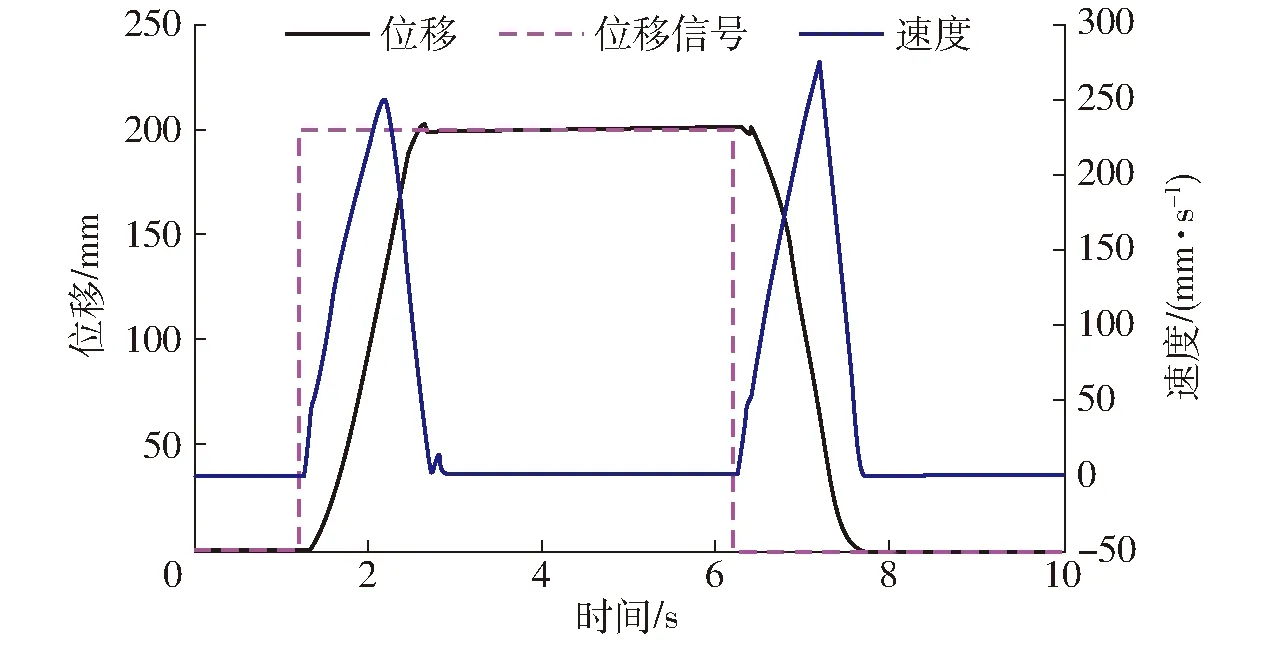
圖13 變排量定轉(zhuǎn)速泵控制差動(dòng)缸位移速度試驗(yàn)曲線Fig.13 Test curves of displacement and speed of differential cylinder under control of VDCS
根據(jù)系統(tǒng)原理,搭建試驗(yàn)臺(tái),對(duì)系統(tǒng)進(jìn)行試驗(yàn)測(cè)試,試驗(yàn)現(xiàn)場(chǎng)照片如圖12所示。電動(dòng)機(jī)轉(zhuǎn)速固定為1 000 r/min,通過(guò)控制變量泵的排量控制差動(dòng)缸,圖13為活塞的位移速度曲線。活塞桿伸出時(shí)最大速度為256 mm/s,位移200 mm的響應(yīng)時(shí)間約1.29 s,活塞收回時(shí)最大速度為274 mm/s,位移200 mm的響應(yīng)時(shí)間為1.23 s,收回時(shí)間比伸出時(shí)間少0.06 s。伸出和收回時(shí)運(yùn)動(dòng)不對(duì)稱,是由于差動(dòng)缸兩腔不對(duì)稱流量造成的,由于沒(méi)有速度控制,設(shè)定的位移較小,造成活塞桿均處于加速運(yùn)動(dòng)狀態(tài)。
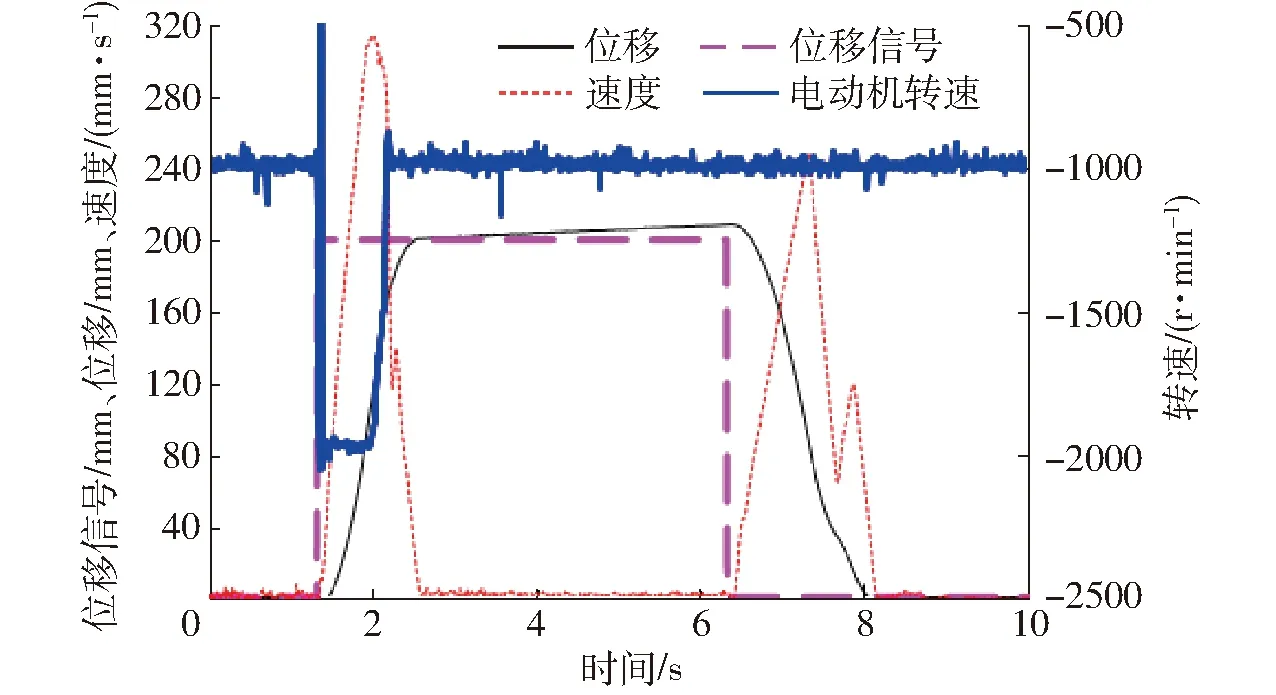
圖14 復(fù)合控制差動(dòng)缸位移、速度、電動(dòng)機(jī)轉(zhuǎn)速試驗(yàn)曲線Fig.14 Test curves of displacement and speed of differential cylinder and rotating speed of motor under control of VDVS
差動(dòng)缸空載時(shí),永磁式同步電動(dòng)機(jī)設(shè)置1 000 r/min最低允許轉(zhuǎn)速和2 000 r/min最高允許轉(zhuǎn)速,保持轉(zhuǎn)向不變。在活塞桿伸出時(shí),控制伺服變量泵排量的同時(shí),將控制信號(hào)疊加在電動(dòng)機(jī)的轉(zhuǎn)速控制信號(hào)上;在活塞桿收回時(shí)只控制伺服變量泵排量,不改變電動(dòng)機(jī)轉(zhuǎn)速。設(shè)置200 mm位移信號(hào),活塞桿的位移、速度及電動(dòng)機(jī)轉(zhuǎn)速曲線如圖14所示。由圖14可以看出,活塞桿伸出時(shí)最高速度為311 mm/s,位移200 mm的響應(yīng)時(shí)間為1.12 s,活塞桿收回時(shí),最大速度為242 mm/s,收回過(guò)程用時(shí)1.43 s,電動(dòng)機(jī)在活塞桿伸出的過(guò)程中轉(zhuǎn)速維持在2 000 r/min,活塞桿接近目標(biāo)位置后,轉(zhuǎn)速維持在1 000 r/min,活塞桿收回時(shí),轉(zhuǎn)速不變。試驗(yàn)時(shí),電動(dòng)機(jī)轉(zhuǎn)向與假定的正方向相反,所以電動(dòng)機(jī)轉(zhuǎn)速曲線為負(fù)值。從圖14可以看出,活塞桿伸出時(shí)的速度明顯快于活塞桿收回時(shí)的速度。
對(duì)比圖13、圖14可知,活塞桿在伸出時(shí),排量、轉(zhuǎn)速?gòu)?fù)合控制比變排量定轉(zhuǎn)速控制速度明顯變快,響應(yīng)時(shí)間縮短0.17 s,相對(duì)變排量定轉(zhuǎn)速控制的響應(yīng)時(shí)間縮短了13.4%。說(shuō)明在控制泵排量時(shí)輔以轉(zhuǎn)速控制可快速控制泵的輸出流量,有效提高差動(dòng)缸響應(yīng)速度。
4.2 排量、轉(zhuǎn)速?gòu)?fù)合泵控差動(dòng)缸系統(tǒng)能耗分析
對(duì)于泵控差動(dòng)缸液壓系統(tǒng)中,能夠運(yùn)行平穩(wěn),響應(yīng)快的基礎(chǔ)上,能效起著至關(guān)重要的作用。在復(fù)合控制下,轉(zhuǎn)速和排量有多種組合方式。為了進(jìn)一步驗(yàn)證不同控制組合下對(duì)能效的影響,將變量泵設(shè)置為恒壓控制模式,如果系統(tǒng)處于壓力控制模式下,節(jié)流大小保持不變,即可實(shí)現(xiàn)負(fù)載一直處于壓力、流量不變的模式,此時(shí)液壓系統(tǒng)輸出的功率保持不變。改變電動(dòng)機(jī)的轉(zhuǎn)速,為了保持恒壓輸出流量不變,電動(dòng)機(jī)的轉(zhuǎn)速和變量泵的斜盤擺角處于反比關(guān)系。根據(jù)系統(tǒng)自適應(yīng)狀態(tài),轉(zhuǎn)速升高斜盤擺角自動(dòng)變小,反之?dāng)[角變大。
將負(fù)載的壓力設(shè)置為5、10、18 MPa。在此過(guò)程中,液壓系統(tǒng)中5 MPa時(shí)流量為10 L/min;10 MPa時(shí)流量為15 L/min;18 MPa時(shí)流量為16 L/min。通過(guò)控制器將PMSM轉(zhuǎn)速?gòu)?50 r/min升至1 500 r/min。在轉(zhuǎn)速升高過(guò)程中,系統(tǒng)輸出壓力和流量保持恒定,變量泵斜盤隨著轉(zhuǎn)速升高開始回?cái)[,擺角變小,即變量泵的排量逐漸變小,獲得電動(dòng)機(jī)輸入功率曲線如圖15所示。
由圖15可以得到,在負(fù)載壓力不變,流量保持恒定時(shí),采用低轉(zhuǎn)速大排量組合系統(tǒng)消耗功率小。從試驗(yàn)數(shù)據(jù)可以得到5 MPa時(shí),450 r/min時(shí)功率為1.5 kW,1 500 r/min時(shí)功率為4.6 kW;10 MPa時(shí),450 r/min時(shí)功率為4.1 kW,1 500 r/min時(shí)功率為7.1 kW;18 MPa時(shí),450 r/min時(shí)功率為7.1 kW,1 500 r/min時(shí)功率為10.1 kW。通過(guò)3個(gè)負(fù)載壓力的比較,系統(tǒng)在450 r/min下工作相對(duì)于1 500 r/min下工作,功率都可以節(jié)省3 kW左右。由此可以得到在負(fù)載不變的情況下,采用低轉(zhuǎn)速大排量工況可以達(dá)到節(jié)能效果。在電液動(dòng)力源系統(tǒng)允許的情況下,如果轉(zhuǎn)速適當(dāng)再降低,能耗還會(huì)繼續(xù)降低。
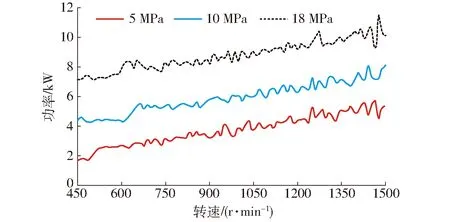
圖15 不同壓力下功率變化曲線Fig.15 Changing curves of input power of motor under different pressures
5 結(jié)論
(1)對(duì)比變排量定轉(zhuǎn)速控制,所提出的排量、轉(zhuǎn)速?gòu)?fù)合控制方法在響應(yīng)速度上明顯變快,響應(yīng)時(shí)間縮短了13.4%。
(2)相同的負(fù)載壓力下,在滿足系統(tǒng)響應(yīng)速度前提下,控制液壓泵工作在大排量低轉(zhuǎn)速工況可以達(dá)到節(jié)能的效果。
1 GRABBEL J, IVANTYSYNOVA M. An investigation of swash plate control concepts for displacement controlled actuators [J]. International Journal of Fluid Power, 2005, 6(2):19-36.
2 QUAN Zhongyi, QUAN Long, ZHANG Jinman. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology [J]. Renewable & Sustainable Energy Reviews,2014, 35:336-346.
3 FEUSER A, DANTLGRABER J, SPATH D. Servo pump drives for differential cylinder[J]. ?lhydraulik and Pneumatik, 1995,39(7):540-544.
4 DANIEL B, CLAUS H, THOMAS L. Hybrid-Antriebe bei Raupenbaggern-Konzepte und Losungen[C]∥3th Hybridantriebe für mobile Arbeitsmaschinen Fachtagung,2011: 117-124.
5 IVANTYSYNOVA M. Die Schraegscheibenmaschine eine Verdraengereiheit mit grossem Entwicklungspotential [C]∥1st IFK Aachen,1998: 359-371.
6 IVANTYSYNOVA M. Displacement controlled linear and rotary drives for mobile machines with automatic motion control[C].SAE Paper 2000-01-2562,2000.
7 BUSQUETS E, IVANTYSYNOVA M. The world’s first displacement controlled excavator prototype with pump switching-a study of the architecture and control [C]∥9th JFPS International Symposium on Fluid Power, 2014: 324-331.
8 ROHIT H, IVANTYSYNOVA M. A series-parallel hydraulic hybrid mini-excavator with displacement controlled actuators[C]∥ SICFP2013, 2013:31-42.
9 BUSQUETS E, IVANTYSYNOVA M. A multi-actuator displacement-controlled system with pump switching—a study of the architecture and actuator-level control [J]. International Journal of Fluid Power System, 2014, 8(2): 66-75.
10 BUSQUETS E, IVANTYSYNOVA M. Adaptive robust motion control of an excavator hydraulic hybrid swing drive [J]. SAE International by Enrique Busquets, 2015, 8(2):568-582.
11 VICKERS INC. Electro-hydraulic system and apparatus with bidirectional electric-motor hydraulic-pump unit: World Patent, 98/11358[P]. 1998-03-19.
12 SATO H. The structure and the application of the electro-hydraulic control system without valves and pipes [J]. Hydraulic and Pneumatic Technology, 2001(6): 36-42.
13 OOBA K. Energy saving hydraulic servo system controlled by AC servo motor direct driven bidirectional pump [J]. Hydraulic and Pneumatic Technology, 2001(6): 52-57.
14 CHRISTOPH B, ACHIM H. Electro hydrostatic actuators for industrial Applications[C]∥Proceedings of the 9th International Fluid Power Conference (9IFK), 2014:134-143.
15 權(quán)龍,NEUBER T, HELDUSER S.轉(zhuǎn)速可調(diào)泵直接閉環(huán)控制差動(dòng)缸伺服系統(tǒng)動(dòng)特性[J].機(jī)械工程學(xué)報(bào),2003,39(2): 13-17. QUAN Long,NEUBER T, HELDUSER S. Dynamic performance of electro-hydraulic servo system with speed variable pump [J]. Chinese Journal of Mechanical Engineering, 2003, 39(2): 13-17. (in Chinese)
16 權(quán)龍, 李鳳蘭, 田惠琴,等. 變量泵、比例閥和蓄能器復(fù)合控制差動(dòng)缸回路原理及應(yīng)用[J]. 機(jī)械工程學(xué)報(bào), 2006, 42(5):115-119. QUAN Long, LI Fenglan, TIAN Huiqin, et al. Principle and application of differential cylinder system controlled with displacement pump, accumulator and proportional valve [J]. Chinese Journal of Mechanical Engineering, 2006, 42(5): 115-119. (in Chinese)
17 張紅娟. 變轉(zhuǎn)速泵控差動(dòng)缸及能耗注塑機(jī)技術(shù)研究[D]. 太原:太原理工大學(xué), 2011. ZHANG Hongjuan. Study on differential cylinder system controlled with variable speed pump and technology of low-energy injection molding machine [D]. Taiyuan: Taiyuan University of Technology, 2011. (in Chinese)
18 楊陽(yáng),權(quán)龍,楊敬.軸向柱塞泵非止點(diǎn)配流窗口過(guò)渡區(qū)壓力脈動(dòng)特性分析[J].機(jī)械工程學(xué)報(bào), 2011,47(24):128-134. YANG Yang, QUAN Long, YANG Jing. Pressure pulsation characteristic analysis of the non-dead spots transition zone between flow distribution windows of axial piston pump [J]. Journal of Mechanical Engineering, 2011, 47(24): 128-134. (in Chinese)
19 閆政, 權(quán)龍, 張曉剛. 電液比例變量泵動(dòng)態(tài)特性仿真與試驗(yàn)[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2016,47(5): 380-387. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160552&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.05.052. YAN Zheng, QUAN Long, ZHANG Xiaogang. Simulation and experimental research on dynamic characteristics of electro-hydraulic proportional variable pump [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5):380-387. (in Chinese)
20 CHEN Mingdong, ZHAO Dingxuan. The gravitational potential energy regeneration system with closed-circuit of boom of hydraulic excavator [J]. Mechanical Systems and Signal Processing, 2017, 82(1): 178-192.
21 林添良, 葉月影, 劉強(qiáng). 挖掘機(jī)動(dòng)臂閉式節(jié)能驅(qū)動(dòng)系統(tǒng)參數(shù)匹配[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2014,45(1):21-26. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140104&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.01.004. LIN Tianliang, YE Yueying, LIU Qiang. Parameter matching for a closed-loop energy-saving system of excavators [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1):21-26. (in Chinese)
Characteristic of Pump Controlled Single Rod Cylinder with Combination of Variable Displacement and Speed
WANG Chengbin QUAN Long
(KeyLaboratoryofAdvancedTransducersandIntelligentControlSystem,MinistryofEducation,TaiyuanUniversityofTechnology,Taiyuan030024,China)
Traditional pump-controlled differential cylinder technology has problems such as complex hydraulic circuit, slow response and high energy consumption. Based on this, a combined control method of displacement and speed was proposed to directly control the differential hydraulic cylinder by using a variable servo pump. Firstly, differential cylinder combined control system was divided into three subsystems based on theoretical analysis of pump-controlled differential cylinder principle. Secondly, the model of the system in which the inner-loop controlled displacement and outer-loop controlled speed was established for simulation. Response speed under hybrid control had better dynamic characteristic than that under constant speed. Thirdly, the test platform was set up for experimental analysis of pump-controlled differential cylinder. The dynamic response of differential cylinder controlled by the system in which the inner-loop controlled displacement and outer-loop controlled speed was faster than that controlled by the system of constant speed, which reduced the time by 13.4%. Under constant pressure mode, the input energy consumption of serve motor was measured. After comparative experiments under different speeds and pressures, the system energy consumption under low speed and large displacement was decreased by 3 kW. Simulation and experiment results showed that the response speed of pump-controlled differential cylinder was improved and the energy consumption was reduced effectively under the combined control mode of displacement and speed.
pump-controlled differential cylinder; compound control; electro-hydraulic servo control; variable servo-pump; permanent magnet synchronous motor
10.6041/j.issn.1000-1298.2017.08.049
2017-05-20
2017-06-30
國(guó)家自然科學(xué)基金項(xiàng)目(51575374)和山西省自然科學(xué)基金項(xiàng)目(2015011056)
王成賓(1977—),男,講師,博士,主要從事機(jī)電液一體化控制技術(shù)研究,E-mail: wangchengbin@tyut.edu.cn
權(quán)龍(1959—),男,教授,博士生導(dǎo)師,主要從事電液伺服及比例控制技術(shù)研究,E-mail: quanlong@tyut.edu.cn
TH137.7
A
1000-1298(2017)08-0405-08
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
