基于多智能體的車輛運輸船裝卸載作業系統仿真
2017-09-03 10:00:54瓅劉朕明
船舶 2017年4期
顏 瓅劉朕明
(1.中國船舶及海洋工程設計研究院 上海200011;
2.上海中船船舶設計技術國家工程研究中心有限公司 上海200083)
基于多智能體的車輛運輸船裝卸載作業系統仿真
顏 瓅1,2劉朕明1,2
(1.中國船舶及海洋工程設計研究院 上海200011;
2.上海中船船舶設計技術國家工程研究中心有限公司 上海200083)
車輛裝卸載作業系統是船舶作業系統的一種。基于腳本和條件判斷的常規作業仿真模型存在可擴展性差、建模成本高等缺點,難以滿足當前作業系統研究的發展趨勢。文中為車輛運輸船裝卸載系統仿真試驗設計一個多智能體系統,建立基于BDI模型的智能體控制模塊,針對裝卸載系統特點設計多智能體協作機制。仿真試驗顯示牽引車、半掛車和升降機可自行開展作業,表明智能體仿真可以簡化作業流程建模工作,該設計工作擴展后可用于各種具有多實體交互協作的船舶作業系統仿真,具有較為廣泛的應用前景。
多智能體;車輛運輸船;作業系統仿真;BDI模型
引 言
車輛裝卸載作業系統是船舶作業系統的一種,船舶作業系統包括作業環境、作業實體和作業方案三個要素。作業環境是指影響作業但不直接參與作業的事物,例如船舶周圍的風浪環境、晝夜環境,以及船舶上的艙室通道。作業實體是指參與作業并發生變化的實物,例如設備、人員、物資等,也可以是設備的部件或子系統。作業方案是指可指導作業執行的預定方案,例如作業實體的初始位置、作業流程等。由于船舶作業系統的復雜性,為確保實際系統有效運行,對系統的設計提出了較高要求。用仿真方法對設計方案進行研究能夠充分檢驗作業系統的各種特性在運行過程中出現的動態變化,從而獲得更加準確的評估結果。然而,隨著船舶作業系統的大型化、環境復雜化和工況多樣化,作業系統中作業實體數量和作業實體間交互協作事件的類型大幅增加,發生交互協作的次數呈指數增長。常規的基于腳本和條件判斷的作業仿真模型存在可擴展性差、建模成本高等缺點,難以滿足當前作業系統研究的發展趨勢。
智能體(Agent)又稱“智能Agent”、“代理體”、“主體”,最早的概念由Carl Hewitt于1977年提出,目前在學術界還沒有統一的定義,一般認為智能體是一種具有自主性的,能夠接受外界信息并做出響應的軟/硬件程序或系統[1-2]。在船舶作業仿真系統中,每一個智能體可以代表一個作業實體,像這樣存在多個智能體的系統稱為多智能體系統(Multi-Agent System, MAS)。智能體仿真又稱基于智能體的建模與仿真方法(Agent-based Modeling and Simulation, ABMS),是指通過各個智能體的自主性及交互行為來描述復雜系統的仿真方法[3-4]。對于船舶作業系統仿真這樣具有大量交互作用的復雜系統,智能體仿真在建模方面具有直觀、靈活和易擴展等優點,在問題求解方面具有速度快、可靠性高和容錯能力強等優點[2]。
目前,智能體仿真在船舶領域已經有一定的應用:吳向君等人[5]以各類抗沉人員為智能體建立抗沉過程仿真的多智能體模型,通過實例計算分析了抗沉過程中的關鍵環節;胡嘯[6]以艦船推進、電力、損管、艦橋等業務系統為智能體,在全船層面探討以任務為驅動的系統架構方法,為建立基于任務的艦船平臺體系結構奠定了基礎;秦久峰等人[7]以船舶動力平臺水冷系統、子系統、資源和人員等為智能體,將分布式多智能體控制方法應用于動力輔助系統控制系統中,可降低操作人員的工作負荷,增加系統的智能性和魯棒性;江建宇[8]以買家、賣家或貨代、船運公司、海關等作為智能體,提出以多智能體仿真為核心的ISPHT開放集成平臺/模型框架,針對港口群腹地集運系統中的幾項重要的決策分別構建具體算法,并檢驗了模型的有效性。然而,對于將智能體仿真應用于具有較多作業實體在空間中行駛、運輸、調運的船舶作業系統,目前尚未見相關報道。本文提出基于多智能體的車輛運輸船裝卸載作業系統仿真模型,并提出多智能體之間的協作機制。
1 裝卸載作業系統
某船專門用于運輸載有箱貨的半掛車。船上設有上下兩層車輛艙。上層車輛艙通過一臺升降機與下層車輛艙連接,下層車輛艙可通過尾跳板與碼頭連接,上下兩層車輛艙均可裝載18輛半掛車,如圖1所示。
該船在裝載時,首先將18輛半掛車通過升降機裝載到上層車輛艙,然后將其余18輛裝載到下層車輛艙,卸載時順序相反。
對于裝卸載作業系統,作業環境包括上下層車輛艙、跳板和碼頭,作業實體包括牽引車、半掛車和升降機,作業方案包括半掛車的布列方案、半掛車上船/下船的轉運流程方案、行駛路線、出動順序等。作業布列方案含有一個列表描述作業實體初始狀態的基本信息,包括每個作業實體的序號、作業實體的類型、作業實體的坐標等。作業流程方案含有一個列表描述作業流程的信息,包括每項作業的序號、執行該作業的實體的序號、該作業的類型,以及開始執行該作業的條件。
由于自然語言描述容易出現二義性、含糊性、不完整性等問題,而采用具有精確數學語義的方法,即形式化方法(Formal Method)進行描述,不僅可以避免自然語言描述的各種缺點,還具有簡潔準確、可用數學證明、易于轉化為編程語言等優點[12-13]。本文以形式化方法描述智能體模型中的各個概念。
假設作業案例:有半掛車Semi1和Semi2布列在上層車輛艙G1中(狀態pOnDeck= G1),需要依次卸載到下層車輛艙G2(pOnDeck= G2)。由于半掛車自身沒有動力,需要由一輛牽引車Trac前來與其掛鉤,牽引進入升降機Elva(狀態pInElva= True),Trac隨后脫鉤并離開Elva,Elva下降到G2。作業案例中涉及的各種角色、作業步驟如表1所示。

表1 作業步驟和作業實體
表中可見半掛車可執行2種作業步驟,分別是被牽引(A=Be Drag)和被運輸(A=Be Trans),升降機可執行2種,牽引車可執行4種。作業流程方案如表2所示。表中可見半掛車Semi1的作業步驟是先執行被牽引(A1=Be Drag),結束后(pInelva=True)再執行被運輸(A2=Be Trans);對于半掛車Semi2,需要等待Semi1的被運輸作業結束(pOndeck= G2),才開始自己的作業步驟。
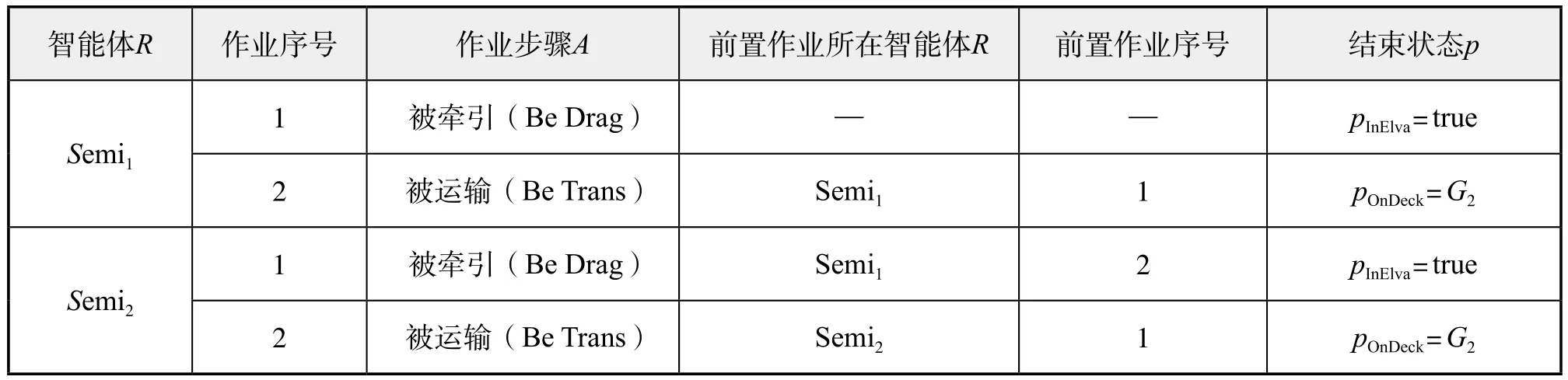
表2 作業流程方案
2 智能體模型
為分析驗證裝卸載作業系統的設計方案,本課題建立了基于多智能體的作業仿真試驗系統。為該系統建立了包含作業環境和作業實體的模型庫,面向多智能體仿真試驗環境,并基于Vega Prime軟件建立了圖像渲染和碰撞檢測功能[9]。系統可讀入作業方案,按方案運行仿真試驗,在仿真循環中驅動各個智能體,記錄仿真結果,最后將仿真結果用于對作業系統設計方案的分析評估。
本文為作業系統中的每個作業實體都建立一個智能體,并根據智能體基本結構,面向作業仿真試驗系統開發,將代表作業實體的智能體模型分為感知模塊、控制模塊和執行模塊,各模塊又細分為多個功能子模塊。系統在仿真循環中依次調用每個智能體的每個模塊,實現作業驅動,如圖2所示。
2.1 感知模塊
感知模塊負責采集并解析環境和智能體自身的信息。
2.1.1 作業生成
本模塊主要用在仿真試驗的初始化階段。首先,仿真系統直接讀取作業布列方案和作業流程方案。系統按布列方案創建各個智能體,將其布列到預定位置上。隨后,各個智能體分別讀取仿真系統的作業流程方案,提取那些僅僅涉及到自身的作業信息,創建一個自己專用的作業流程列表。在作業案例中,半掛車Semi1和Semi2各自讀取到作業流程;而牽引車Trac和升降機Elva根據Semi1和Semi2的需求開展作業,因此在作業流程方案中沒有與它們對應的作業流程。
2.1.2 環境數據采集
對某個智能體而言,環境不僅包括作業環境,還包括所有作業實體的狀態信息,以及智能體間相互發送的消息。各智能體在仿真循環中,執行模塊向系統發送自身當前狀態,系統將這些信息匯總到一個作業實體狀態列表中供其他智能體采集。列表涵蓋所有智能體的必要狀態,包括每個作業實體的序號、類型、坐標,及其正在執行的作業類型等。為減少系統運算負荷,智能體不用采集所有的環境數據。在作業案例中,當Semi2等待Semi1離開時,僅需要采集Semi1的位置狀態;當Semi2被Trac牽引之后,為獲取運動學仿真結果,Semi2需要采集Trac的運動狀態。2.2 控制模塊
控制模塊負責對感知數據進行分析,開展思考過程并控制智能體的行為,此外,為實現多智能體協作,控制模塊需要解析其他智能體發來的協作需求消息,并生成自身協作需求消息。本系統智能體的思考過程基于BDI模型,該模型的基本概念由Bratman等于1988年提出,是指一種將思考過程描述為信念(Belief)、愿望(Desire)、意圖(Intention)及其相互關系從而實現智能體思考功能的模型,是近年來計算機學術界廣泛研究的一種智能體結構[10-11]。
2.2.1 信念調整
信念b是指智能體對環境和自身的認識的集合。在本系統中,智能體的信念b的內容包括:來自感知模塊的作業流程和當前時刻環境數據;來自身思考過程的中間信息,例如智能體的愿望集D、意圖集I等。信念調整模塊首先存儲作業流程,然后根據作業流程確定哪些環境數據需要被采集,以便感知模塊去采集環境數據,隨后,將采集的數據存儲到信念b中;另一方面,一旦智能體調整了愿望d或意圖i,也將更新信念b中的愿望集D或意圖集I。下一輪仿真循環時,信念調整模塊將結合作業流程、愿望集D和意圖集I共同確定哪些環境數據需要采集。
2.2.2 愿望調整
愿望d是指可能實現的信念集合,即智能體執行作業的目標。本系統中智能體有兩種方法生成愿望,一種是根據作業流程方案生成愿望,在作業案例中,半掛車Semi1和Semi2的愿望集DSemi1= DSemi2={d1, d2}, d1={pInElva=True}, d2={pOnDeck=G2}。另一種是根據收到的協作需求消息生成愿望,例如Semi1向Trac發出協作需求消息,Trac收到消息后生成愿望集DTrac=g0gggggg, d={R=Semi1, pInElva=True }。
2.2.3 意圖調整
意圖i是基于愿望所生成的行為或作業步驟的集合,本系統智能體基于規則庫直接生成意圖,在作業案例中,Trac生成愿望集DTrac后,根據規則庫需要生成5項具有串聯關系的意圖,內容依次為“空載行駛到半掛車前”、“掛鉤”、“牽引到升降機”、“脫鉤”和“空載行駛離開升降機”。因此有意圖集ITrac={i1, i2, i3, i4, i5}, i1={A=Steer,R=Semi1}, i2={A=HangerOn}, i3={A=Drag, R=Semi1,(pInElva=True)∈R}, i4={A=HangerOff}, i5= {A=Steer,pInElva=False}。
2.2.4 作業規劃
智能體形成意圖集I后,根據規則庫,規劃行為的具體執行方法和其他必需的輔助行為。從愿望調整到意圖調整、再到作業規劃的過程可視為“對一個大的目標逐步細化執行方案”的過程。作業系統中通常僅有一部分作業需要規劃,在作業案例中,對于牽引車的意圖i2和i4僅需要簡單的計算,而對于i3,則需要為作業步驟A=Drag規劃路徑。本文使用改進的RRT法,結合牽引系統的行駛能力,以及牽引系統的幾何模型與環境碰撞檢測的結果,規劃牽引車的路徑。
2.2.5 作業執行
檢查作業的執行情況,根據作業執行情況確定當前的作業步驟,并調用執行模塊來實現作業。以牽引車行駛為例,牽引車智能體輸出轉向輪的方向角、轉向輪方向、制動度等數據變化,發送到執行模塊進行動力學運動學仿真。
2.3 執行模塊
執行模塊負責根據控制模塊的輸入執行具體的作業過程運算,算法均采用目前較為成熟的技術。
(1)甲板約束:模擬車輛因受重力影響被約束在甲板、跳板上,在行駛時產生上下起伏。
(2)簡單響應計算:無需仿真計算,僅受簡單規則控制的計算,例如掛鉤、脫鉤等作業步驟在建模簡化后僅體現出耗時屬性。
(3)行為動畫:實體有空間狀態變化,但較簡單,無需仿真計算,例如升降機沿直線上升或下降。
(4)動力學運動學仿真:實體狀態變化明顯且復雜,需要運行仿真計算,例如牽引車行駛速度受自身與半掛車質量、發動機功率、行駛阻力和甲板約束等動力學因素影響,半掛車行駛軌跡受牽引車行駛軌跡、牽引車與半掛車輪子位置、半掛車輪子與掛鉤的距離等運動學因素影響。
(5)碰撞檢測:檢測半掛車和集裝箱在被牽引過程中是否會發生與艙壁或其他集裝箱的最小距離小于安全距離的情況。
(6)狀態生成:通過各種計算后生成智能體的當前時刻狀態,用于反饋給系統。
基于多智能體的仿真系統與傳統的面向腳本的仿真系統相比,基本的結構相同,都使用具有時間步長的仿真循環,在每次仿真迭代中遍歷所有作業實體并計算其在該時刻的狀態。不同之處在于,在基于智能體的仿真系統中,所有作業實體都增加了對環境感知和對自身控制的功能模塊,不再簡單執行來自腳本的指令;此外,作業執行的相關運算(例如數學仿真運算、行為動畫等),都被封裝到對應智能體的實例內,而其算法仍與傳統的仿真相同。從這兩個不同點出發,對傳統的面向腳本的仿真系統進行重構,可較易實現基于多智能體的仿真。
3 多智能體協作
多智能體協作是指系統內的智能體之間通過相互配合完成共同承擔的任務的方式[1]。本文將協作視為一種由多個智能體執行的、具有交互性和并行性的特殊作業。交互性是指參與協作的各智能體之間互相交換自身狀態信息,即協作的一方需要感知協作對象的信息。并行性是指參與協作的各智能體并行執行作業,即同時開始執行作業。本文從協作消息和協作機制兩方面進行論述。
3.1 協作消息
本系統中智能體之間依靠消息來傳遞協作的意愿,消息采用知識查詢及操作語言(Knowledge Query and Manipulation Language, KQML)來描述,這是一種使用較廣泛的智能體通訊語言[14-15]。基本語法為:以行為詞(Performative)開頭,以一組具有標準含義的參數名(Para_name)構成消息的框架,將參數內容(Para_content)向用戶開放。在作業案例中,半掛車Semi1發消息給牽引車Trac告知自身愿望d1={pInElva=True},消息代碼如圖3所示。
3.2 協作機制
協作在本質上仍是一種作業,其執行過程與常規作業的執行過程一致,而規劃過程則有所不同。本文基于BDI模型建立協作規劃機制,如下頁圖4所示。從圖中可見,規劃過程仍可歸納為愿望調整、意圖調整和作業規劃這三大步驟,見三個虛線框;與常規的愿望-意圖-作業規劃的過程相比,智能體還要判斷愿望、意圖對于協作對象當時狀態來說是否合理,以及作業規劃對于協作對象是否成功(見虛線框內)。在作業案例中,Trac創建了意圖i3={A=Drag, R=Semi1, (pInElva=True)∈R},當i2達成之后,Trac需要感知Semi1的屬性pInElva是否為False,如果為True,則i3不成立,系統將判斷作業過程出錯。
為確保協作的并行性,系統建立“被動者先行”的機制。以作業案例中Trac牽引Semi1前進為例,其各自執行的作業分別是Drag和BeDrag。在作業開始前,由Trac向Semi1發送開始執行的消息,Semi1收到后發出回應消息并開始執行BeDrag作業,Trac收到回應消息后開始執行Drag作業。這種機制使Semi1比Trac開始執行作業的時刻早一輪仿真循環,但鑒于Semi1是協作中處于“被動”的一方, 它提前開始執行作業,就可提前開始感知Trac的運動狀態,從而獲得Trac運動狀態的完整變化。
4 仿真運行
本系統基于多智能體仿真為第1章所述的卸載作業進行建模和試驗,僅向半掛車Semi1、Semi2發送依次前往G2的消息,并在三維場景中觀察系統運行的情況。可見各個智能體自行開始作業,牽引車Trac1收到半掛車Semi1的消息后前往半掛車,與半掛車掛鉤后執行牽引作業;半掛車到達升降機后,牽引車脫鉤離開升降機,隨后升降機運輸半掛車下降到G1甲板;同時牽引車Trac2也牽引半掛車Semi2來到升降機前,等待升降機返回。在這一系列作業過程中,牽引車和升降機的所有作業步驟都由智能體自行規劃執行,無需參試人員額外指定作業(作業場景如圖5所示)。
由圖5中可見牽引車Trac1已與半掛車Semi1脫鉤,單獨行駛;半掛車Semi1正在被升降機Elva運輸下降;牽引車Trac2正牽引半掛車Semi2向升降機位置行駛過來。
5 結 論
通常在作業方案中會有很多作業步驟之間存在必然的條件關系,例如牽引車必須在與半掛車掛鉤之后才能牽引。在傳統的基于腳本和條件判斷的仿真中,這些必然的條件關系與其他作業步驟混在一起,都需要方案設計人員進行規劃,從而造成作業方案的復雜性大幅增加。而在基于多智能體的仿真系統中,各類作業實體有各自的規則庫,開發人員在其中設置規則,描述智能體在各種可能的條件下會作出的響應。這些規則分散在愿望、意圖和作業規劃這三個層面上,且具有通用性,便于作業方案設計人員隱藏,從而使基于多智能體的仿真大幅簡化作業方案的設計工作。因此,基于多智能體的仿真技術更加適合用于作業方案復雜且需要作業實體間密切協作的作業仿真,除車輛裝載卸載以外,還有鉆探設備裝配作業、物探設備收放作業、碼頭集裝箱作業等,具有廣泛的應用前景。
[1] 賈利民, 劉剛, 秦勇. 基于智能Agent的動態協作任務求解[M]. 北京:科學出版社, 2007.
[2] 任海英. 多智能體方法在作業車間調度中的應用[M].北京:北京工業大學出版社, 2013.
[3] 廖守億, 王仕成,張金生. 復雜系統基于Agent的建模與仿真[M].北京:國防工業出版社, 2015.
[4] MACAL C M, North M J. Tutorial on agent-based modelling and simulation[J]. Journal of Simulation, 2010(3):151-162.
[5] 吳向君, 侯岳, 浦金云. 艦艇抗沉過程的多智能體仿真模型[J]. 艦船科學技術, 2011(5): 53-58.
[6] 胡嘯. 多主體建模方法在艦船任務系統中的應用[J].計算機工程與設計, 2013(3): 1137-1140.
[7] 秦久峰, 曾凡明, 陳于濤, 等. 動力輔助系統分布式多Agent 控制理論與試驗研究[J]. 中國造船, 2013(1):189-196.
[8] 江建宇. 共享腹地港口群集疏運系統智能體仿真研究[D]. 華南理工大學, 2014.
[9] 王孝平, 董秀成 鄭海春, 等. 實時三維虛擬現實開發技術[M]. 成都:西南交通大學出版社, 2012.
[10] O’Hare GM P, Jennings N R Eds. Foundations of Distributed Artificial Intelligence[M] . John Wiley & Sons,Inc. 1996:505-526.
[11] 姚莉, 龔勇, 王長纓, 等.一種基于BDI Agent的復雜系統設計建模方法[J]. 小型微型計算機系統, 2005(4):693-698.
[12] 曹軍海, 張和明, 熊光楞.多Agent仿真中Agent行為的形式化描述方法[J]. 系統仿真學報, 2004(11):2398-2400.
[13] 馮松軍. 淺析形式化描述方法的應用[J]. 電子技術與軟件工程, 2014(10):107-108.
[14] 孫憲鵬, 張宇, 王成恩, 等. 基于KQML語言的合同網協議模型及實現[J]. 信息與控制, 2000(5): 454-460.
[15] 程紅斌, 張鳳鳴, 鄒強. 基于CORBA的多傳感器管理原型系統研究[J]. 系統仿真學報, 2006(2): 456-459.
MARIC設計的2 000 m3/h自航吸盤挖泥船“吸盤4”順利交付
7月5日,由中國船舶及海洋工程設計研究院(MARIC)為長江航道局設計的第三艘2 000 m3/h自航吸盤挖泥船“吸盤4”在江蘇海新船務重工有限公司舉行了交接儀式,標志著該船順利建成交付船東使用。
“吸盤4”主要用于長江中游航道的應急維護疏浚任務,該船作業區域可覆蓋長江A、B、C三級航區(含三峽庫區)。該船配備了寬度為10 m的吸盤裝置,最大挖深可達16 m;配備了1臺功率為2 800 kW的泥泵以及2臺功率為500 kW的高壓沖水泵。該船可采用拋錨絞進及自航推進兩種疏浚作業方式,可通過尾排管排泥上岸或通過邊拋管進行邊噴拋泥。吸盤挖泥船具有吃水淺、一次挖寬大、泥泵吸入濃度高、調遣方便、采用自航推進作業和邊拋排泥方式時不礙航等特點,特別適用于長江航道突擊搶通和維護疏浚作業需求。
2 000 m3/h自航吸盤挖泥船采用全電力驅動型式,能將推進功率和疏浚裝置功率靈活進行分配,在滿足設計指標的基礎上,可在不同環境條件、不同挖深作業工況下,通過合理的功率分配調整,進一步提高挖泥產量或排泥距離,充分發揮吸盤挖泥船的作業能力和效率。
“吸盤4”的交付將大大增強長江中游航道的應急維護疏浚能力,為長江航道局保障長江航道暢通、實現長江黃金水道向國家戰略重要支點的轉型升級提供堅實的保障能力。
Multi-agent simulation of loading and unloading operation system for vehicle carrier
YAN Li1,2LIU Zhen-ming1,2
(1. Marine Design & Research Institute of China, Shanghai 200011, China; 2. Shanghai National Engineering Research Center of the Chinese Ship Design Technology Co., Ltd., Shanghai 200011, China)
As one of the ship operation systems, the traditional vehicle loading and unloading operation system based on the script and condition judgement has the disadvantages of the poor expansibility and the high cost of modeling, which cannot meet the development trend of the current operation system. A multi-agent system is designed for the simulation of the vehicle carrier loading and unloading operating system. The intelligent control module based on the belief-desire-intention (BDI) model is built for the design of the multi-agent cooperative mechanisms according to the characteristics of the loading and unloading operation system. The simulation results show that the tractors, semitrailers and elevators can work on their own, indicating that the agent-based simulation can simplify the modeling of the working fl ow. The design can be extended for the simulation of the various ship operation systems that interact and cooperate with the multiple entities, which has a broad application prospect.
multi-agent; vehicle carrier; operating system simulation; belief-desire-intention(BDI)model
U662.9
A
1001-9855(2017)04-0019-08
10.19423 / j.cnki.31-1561 / u.2017.04.019
2016-12-22;
2017-01-10
顏 瓅(1978-),男,高級工程師,研究方向:船舶作業系統仿真研究。劉朕明(1988-),男,工程師,研究方向:船舶初步設計系統開發。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
