基于弧長法對柔性接頭高壓下屈曲響應研究
2017-09-03 05:05:38黃朝暉劉偉凱
導彈與航天運載技術 2017年4期
黃朝暉,張 瀟,劉偉凱
基于弧長法對柔性接頭高壓下屈曲響應研究
黃朝暉1,張 瀟2,劉偉凱1
(1. 中國航天科技集團公司第四研究院,西安,710075;2. 西安航天化學動力廠,西安,710025)
高壓下柔性接頭擺動力矩減小的原因一直未得到確切解答,只歸結到剪應力分布的變化很難讓人信服。通過對柔性噴管中柔性接頭結構形式的特點進行分析,認為隨壓強升高擺動力矩減小的根本原因為柔性接頭的屈曲響應。分析了弧長法的原理以及其在屈曲分析中的應用,通過數值計算軟件ABAQUS開展對柔性接頭屈曲過程的仿真分析。分別通過通用靜力算法和弧長算法對不同預擺角下承壓過程進行模擬,得到擺角隨壓強的變化規律。計算結果表明:不同壓力下的彈性力矩與實驗結果對比,一致性較好,所用方法和結論可以為柔性接頭高壓工作環境下的設計提供有益參考。
固體火箭發動機;弧長法;柔性接頭;屈曲;擺動力矩
0 引 言
固體火箭發動機推力向量控制方式有擺動噴管式、燃氣舵式和二次噴射式等。擺動噴管的優點在于對發動機的效率影響較小,可實現長時間的方向控制。擺動噴管可分為柔性噴管、珠承噴管和球窩噴管等,其中柔性噴管因為結構簡單、工藝成熟而被廣泛應用于固體火箭發動機中。柔性接頭通過固定體和活動體將柔性噴管與發動機燃燒室連接,并通過自身保持活動體與固定體之間的密封,是固體火箭發動機柔性擺動噴管的核心部件。在柔性接頭或柔性噴管的擺動試驗和實際工作中存在試驗容器或燃燒室工作壓強的不斷增加,導致柔性接頭的彈性力矩減小,從而使得整個噴管的擺動力矩減小,這種現象出現在眾多發動機型號中[1,2]。
文獻[3]~[10]對柔性接頭的生產設計、高壓或者不同溫度工作時的力學響應、結構的可靠性、強度及穩定性進行了分析,為固體火箭發動機柔性接頭的設計提供了參考,但是對于高壓下柔性接頭擺動力矩減小的根本原因分析較少;王雪坤等[11]開展了彈性件材料的雙軸向加載拉伸試驗,設計了代表柔性接頭中彈性件結構特性的三重片、四重片橡膠試件,對試件壓縮的同時進行剪切聯合加載試驗,開展了有限元數值仿真計算,得到橡膠材料本身的剪切模量隨外界壓強的變化規律;王春光等[12]分析了隨壓強的增大柔性噴管彈性力矩減小的原因,利用ABAQUS有限元數值模型模擬了柔性接頭的擺動過程,計算得到彈性件上的切應力分布,認為切應力分布隨容器內壓強變化是彈性力矩減小的內在原因。
本文分析認為,彈性件上的剪切應力分布隨容器內壓強變化并不是柔性接頭擺動力矩減小的根本原因,而是柔性接頭在燃燒室內壓及力矩的雙重作用下,整體機構對外力產生一種響應,該響應導致彈性件任意剖面上的剪切應力分布發生變化,最終導致彈性力矩減小。柔性接頭在高壓及擺動聯合作用下的屈曲現象是:首先以響應為前提,然后有剪切應力分布變化,最終導致彈性力矩變化。
屈曲分析多用來研究和分析結構在特定外界載荷下的穩定性或者確定結構在失穩時刻的臨界載荷,主要分為非線性屈曲分析和線彈性屈曲分析。線彈性屈曲分析又稱為特征值屈曲分析,非線性屈曲分析主要包括:彈塑性失穩分析、幾何非線性失穩分析和非線性后屈曲分析等[13]。弧長法有效地分析了結構非線性前、后屈曲,而且對屈曲路徑進行跟蹤,在非線性屈曲分析中應用較多[14,15]。
本文根據屈曲分類,通過ABAQUS計算軟件中的通用靜力非線性計算分析和弧長法計算分析對柔性接頭的擺動過程進行數值計算,將計算結果與試驗所得結果進行對比,分析了柔性接頭結構在高壓及擺動作用下的屈曲響應特性。
1 柔性接頭的屈曲響應及計算方法
型號研制中,柔性接頭每件產品都要在地面進行冷態性能擺動試驗,測試時必須模擬不同的燃燒室壓強。柔性接頭擺動試驗過程如圖1所示。由圖1可知,接頭安裝在容器上,容器內壓強可變,用剛性擺桿代表噴管擴張段,B、C兩點之間安裝作動器,施加擺動力矩。
1.1 柔性接頭工作過程及結構特性
柔性接頭是由多個同一中心的環狀球面增強件和彈性件一層覆蓋一層粘接在一起,在最外側和最內側都有一個法蘭組成的一個整體,彈性件材料主要是天然橡膠或硅橡膠,增強件材料是金屬或碳纖維復合材料,柔性接頭結構如圖2所示。
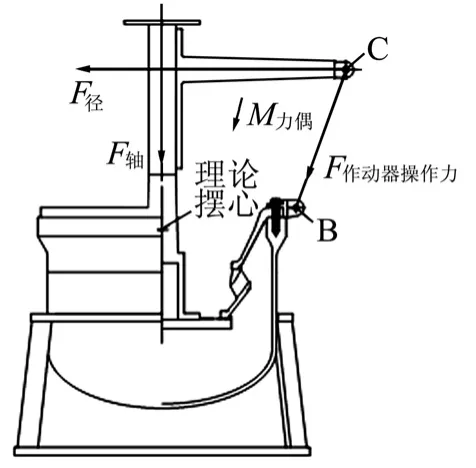
圖1 柔性接頭的 擺動試驗示意
柔性接頭為非線性橡膠堆結構,其擺動過程見圖1,作動器收縮施加擺動力矩,作動器的操縱力通過擺桿(實際發動機中為噴管結構)傳遞到柔性接頭前法蘭,實現柔性接頭擺動。在內壓載荷作用下,柔性接頭同時受到擺動載荷的雙重加載。實驗發現,柔性接頭在受側向壓縮時,彈性力矩減小,從而造成擺動力矩的減小。
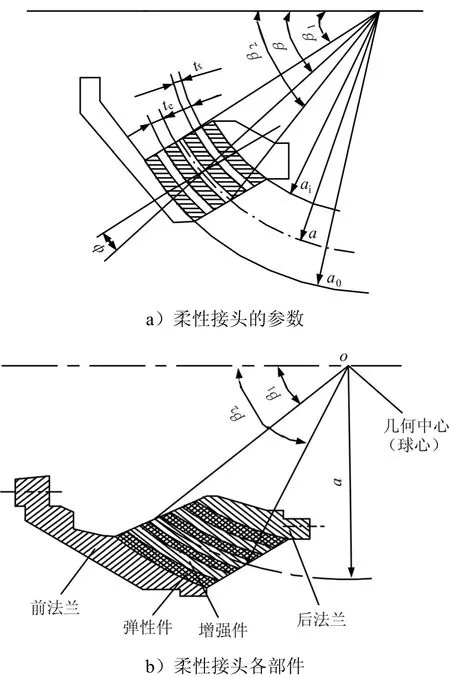
圖2 柔性接頭結構形式
研究結構的屈曲臨界載荷或屈曲后特性的方法有非線性屈曲分析和特征值(線性)屈曲分析兩種。特征值屈曲分析通常屬于結構的線性去屈曲分析,用于研究理想的線彈性結構自身的理論屈曲載荷(即分叉點)。由于柔性接頭的特殊結構形式,且橡膠為超彈性材料;另外由于壓力和擺動的雙重作用,接頭的屈曲過程應為非線性屈曲過程。非線性屈曲分析一般考慮結構有一定初始缺陷,如長度的千分之一、壁厚的十分之一、按實際生產中的制造誤差賦值和外力的初始擾動等。
分析認為,對于柔性接頭結構的屈曲過程與橡膠堆結構類似[16]:接頭擺動力矩相當于側向力的初始擾動,使接頭產生一定轉角位移,在壓力的作用下,隨壓力升高,相同的力矩可以產生更大的轉角位移。特別說明的是,側向擺動力矩與壓力載荷是分別加載的,通過前期仿真及試驗驗證,二者的加載次序并不影響彈性力矩的減小效果。以上過程即為柔性接頭的失穩過程。
1.2 弧長法理論計算過程
弧長法屬于雙重目標控制方法,即在求解過程中同時控制荷載因子和位移增量的步長。弧長法的迭代求解過程如圖3所示。
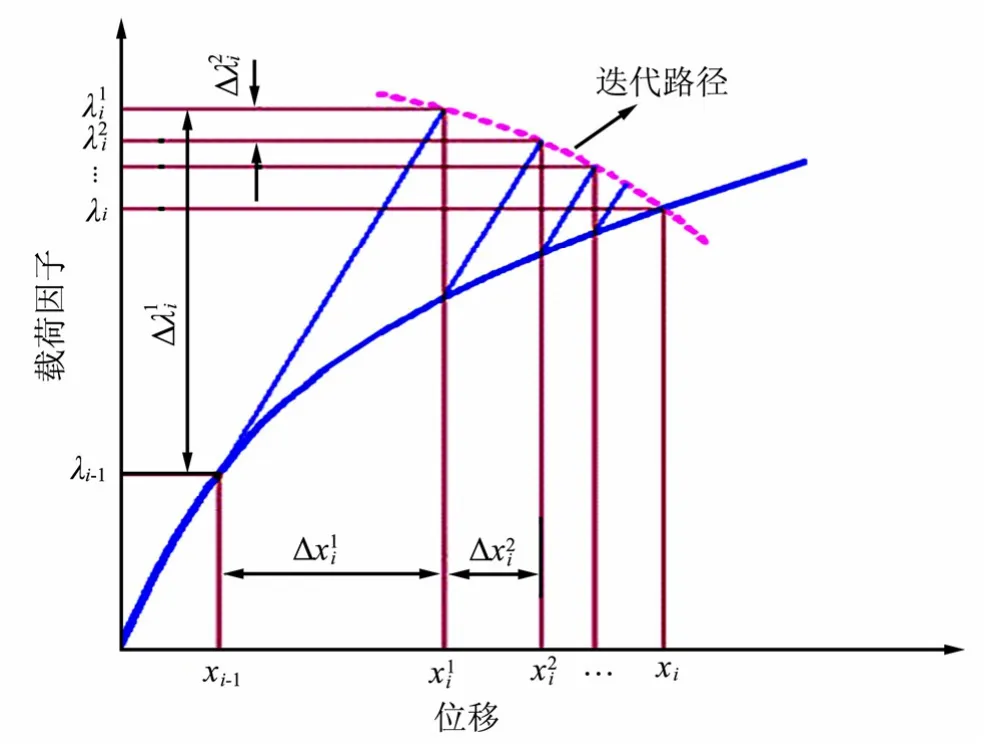
圖3 弧長法迭代示意
從圖3中可以發現,若荷載增量Δλij=0(j ≥2)(其中,下標i為第i個荷載步,上標j為第i個荷載步下的第j次迭代),則迭代路徑變為平行于x軸的一直線段,這就是著名的Newton-Raphson方法。
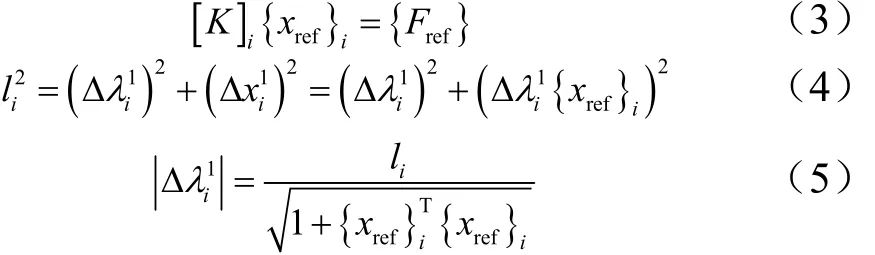
設第i?1個荷載步收斂于(xi?1,λi?1),則對于第i個荷載步,需要迭代j次才能到達新的收斂點(xi,λ)i上。在ABAQUS算法中,外部參照載荷{Fref}需要用戶以外荷載的形式進行輸入。因此,作用在所研究結構上的真實外力為λ{Fref}。由于Newton-Raphson方法在迭代過程中,以位移控制(或荷載控制)時,位移增量步長Δλ(或荷載增量步長)為常數,無法越過極值點而得到完整的荷載-位移曲線。實際情況中,要想使求解過程越過極值點,只有不斷變化荷載的增量步長。
由圖3還可以發現,弧長法的荷載增量步長Δλ是在不斷變化的,可以自動進行荷載控制,但這個過程又使得原來的方程組增多了一個多余的未知變量,因此要想求解還需要補充一個控制方程,即:

由式(1)可以發現,其迭代路徑實際上是以上一個荷載步的收斂點(xi?1,λi?1)為圓心,半徑為li的圓弧,因此稱為弧長法。一般情況下,要求用戶指定初始弧長半徑l1或固定的弧長半徑l0,一旦設定了初始弧長半徑,依據收斂速率的快慢,可按式(2)計算il:

式中 nd為荷載步希望收斂迭代的次數,通常取為6;ni?1為前一荷載步的迭代次數,如果大于10時就取10。

若在計算中考慮材料塑性的影響,則每個迭代step的切線剛度矩陣需要以當前迭代步的構形為依據,因此切線不再平行。
2 數值計算模型及計算過程
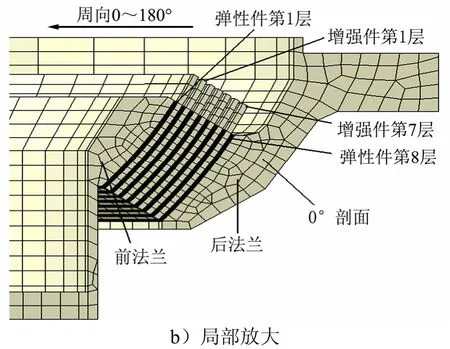
柔性接頭計算模型如圖4所示[2]。
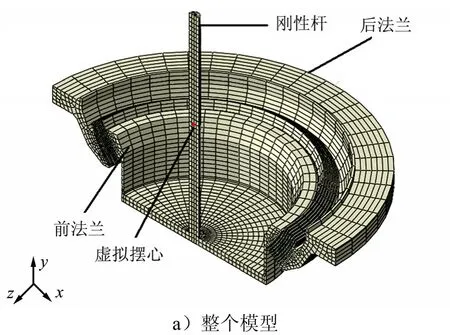
圖4 柔性接頭計算模型
續圖4
由圖4a可知,對前法蘭及堵蓋整體施加壓強載荷可實現不同試驗容器內壓強的模擬,驅動載荷通過在虛擬擺心施加力矩實現,虛擬擺心通過剛性桿與前法蘭相連。橡膠材料使用超彈本構模型模擬,增強件為鋼材料。
有限元模型單元總數約為20 000個,其中橡膠彈性件設置9層,金屬增強件設置8層,整個接頭沿周向平均劃分為35等份,在接頭的寬度方向劃分為20等份,彈性件在厚度方向劃分為5層,增強件劃分為3層。彈性件橡膠材料全部采用雜交單元C3D8H模擬,增強件采用減縮積分單元C3D8R模擬;前后法蘭、加壓蓋板以及加載部分近似看成剛性體,使用剛體單元R3D4模擬[2]。
計算工況可分為兩步:a)將柔性接頭沿擺心預擺一定角度,相當于初始擾動或結構的初始缺陷;b)對接頭分別施加壓力載荷,最大為6 MPa(發動機實際燃燒室最大壓強),可用通用靜力非線性計算分析和弧長法計算分析進行計算。
預處理單元是將大顆粒的污染物及指標處理至要求限值,同時去掉或分解掉對主體單元處理效果有較大影響的的污染物。本工藝的預處理主要包括分質預處理和綜合預處理。分質預處理包括爆珠隔油預處理系統和油墨清洗廢水脫色預處理系統,綜合預處理為格柵、調節池。
3 仿真結果與試驗對比分析
仿真計算分別通過通用靜力非線性計算分析和弧長法計算分析進行計算,計算結果如圖5所示。
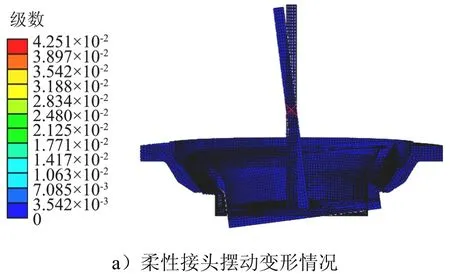
圖5 計算變形
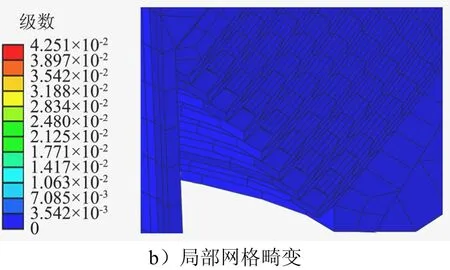
續圖5
初始接頭擺動為1°,隨壓力的增加,擺動角逐漸增大,同時彈性力矩減小,擺角最大增大到2.435°,如圖5a所示。隨著壓力的增加橡膠彈性件的網格變形嚴重,當壓力接近6 MPa時,網格畸變,計算被迫中止,局部網格變形如圖5b所示。
預擺角設為0.5°、1°、2°和3°,最大壓力設為6 MPa,計算不同壓力下的擺角變化形式,如圖6所示。
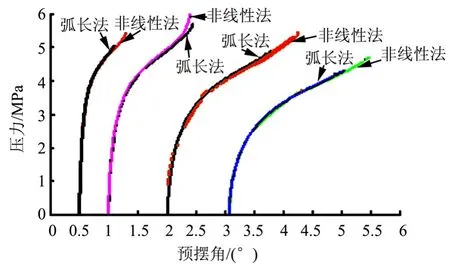
圖6 壓力擺角變化曲線
從圖6中可以看出,非線性法與弧長法計算結果接近,但用非線性法計算的壓力略高于弧長法。
在非線性屈曲分析中,通過觀測載荷-位移曲線來判斷結構的失穩點及失穩過程。結構的載荷位移曲線主要有以下3種形式,如圖7所示。根據載荷位移路徑的變化,屈曲又分為極限屈曲、穩定分支屈曲和不穩定分支屈曲。
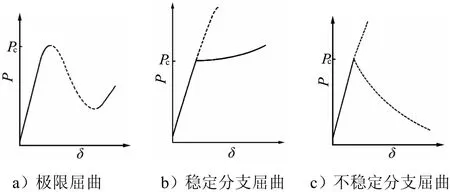
圖7 不同情況下的載荷位移曲線
對比圖7中3種圖形,柔性接頭的屈曲過程更接近圖7b的穩定分支屈曲過程,但是柔性接頭無確定的臨界載荷。分析認為,由于柔性接頭特殊的非線性結構,隨壓力的增加,結構擺角增大,說明結構形狀時刻在發生變化,對于用靜力結構分析這種變形都屬于大變形范疇,后一步的變形形式直接由前一步的變形所決定,因此新結構形式的臨界載荷也應該時刻變化。
另外,隨著預擺角的增加,不同曲線的斜率變化越加明顯,說明結構的失穩越嚴重。由于預擺角增大時,側向擾動增大、相同壓力下擺角增加量更大、結構更傾向于嚴重失穩。
計算非線性和弧長法在不同壓力下的彈性力矩,將所得數據與實驗結果對比,彈性力矩變化趨勢如圖8所示。

圖8 彈性力矩隨壓力變化趨勢示意
由圖8可知,非線性和弧長法計算所得彈性力矩變化趨勢基本相同,只有微小變化。計算結果表明,數值計算與實驗所得到的結果基本一致,誤差變化范圍較小,但是實驗結果的彈性力矩下降趨勢比數值計算結果更為明顯。分析認為,誤差產生的原因是有限元建模時并未考慮到柔性接頭實際生產中的制造偏差,如彈性件、增強件的厚度不均勻等,實際生產中的尺寸誤差可能成為初始擾動的一部分,從而導致接頭更容易發生偏轉,即彈性力矩下降更快;在較高的容器壓強下,橡膠單元處于大變形狀態,計算結果偏離真實值,數值模型很難全程捕捉實際模型的各種力學行為。
為了說明預擺缺陷與制造缺陷對接頭屈曲失穩狀態影響的差別,分別將預擺角1°、3°和制造偏差產生的1°、3°的模型進行屈曲仿真分析,施加最大壓力6 MPa,計算不同壓力下的預擺角變化,計算所獲得結果如圖9所示。由圖9可知,預擺缺陷與制造偏差缺陷對接頭屈曲的影響趨勢相同,制造偏差產生的失穩形式更為嚴重。該結論證明了側向力與擺角制造偏差都是使接頭產生高壓失穩的原因之一。

圖9 預擺角與制造偏差對擺角的影響
4 結 論
對柔性接頭的屈曲特性進行分析,通過不同計算方法對柔性接頭預擺條件下的承壓進行模擬,并對比實驗結果,得到如下結論:
a)柔性接頭高壓下彈性力矩減小的根本原因為:柔性接頭在外部擺動力矩和燃燒室壓強共同加載作用下的屈曲響應,接頭擺動力矩相當于側向力的初始擾動,使接頭產生一定轉角位移;在壓力作用下,隨壓力升高,相同力矩會產生更大的擺角位移,即彈性力矩減小。
b)非線性方法和弧長方法均可以較好地模擬接頭的擺動失穩過程,且非線性方法跟蹤的路徑范圍更大,可以計算得到較高壓強下的結果,說明弧長方法并不是在所有情況下都優于非線性方法。通過非線性方法與弧長方法的模擬,發現柔性接頭的屈曲過程為穩定分支屈曲過程,但是數值仿真方法仍無法捕捉到柔性接頭確切的屈曲臨界載荷。
c)非線性方法和弧長方法計算得到彈性力矩變化趨勢基本相同,只有微小變化。對比實驗所得結果,數值仿真計算所得到的結果與實驗獲得的結果趨勢基本一致,誤差在較小范圍內,說明兩種方法均可以用力模擬柔性接頭的屈曲行為,用來進行柔性接頭的前期優化設計。
d)通過對比制造偏差(如彈性件厚度不均勻)與預擺角對接頭屈曲的影響,可以發現兩種情況下接頭的屈曲失穩形式一致,該分析可以較好地解釋在實際加壓實驗中,柔性接頭自己傾倒的現象。
[1] 陳汝訓, 劉銘初, 李志明, 等. 固體火箭發動機設計與研究[M]. 北京:中國宇航出版社, 2007.
[2] 王春光, 史宏斌, 王雪坤, 等. 高壓下噴管柔性接頭擺動力矩數值分析[J]. 推進技術, 2011, 32(2): 202-206.
[3] 張曉光, 劉宇, 任軍學, 等. 小型柔性接頭推力矢量性能試驗[J]. 航空動力學報, 2012, 27(12): 2836-2840.
[4] 王超, 任軍學, 郝文強, 等. 柔性接頭有效擺心漂移特性[J]. 航空動力學報, 2014, 29(12): 2993-2996.
[5] 史宏斌, 等. 控制力作用柔性噴管動力響應研究[J]. 航空動力學報, 2003, 18(4): 563-568.
[6] Shani S, Putter S, Peretz A. Development of a high-performance flexible for thrust vector control[R]. AΙAA95-3047, 1995.
[7] Donat J R. Solid rocket motor nozzle flexseal design sensitivity[R]. AΙAA93-1122, 1993.
[8] 安春利, 常新龍. 柔性接頭彈性件超彈性本構參數擬合和低壓擺動非線性有限元分析[J]. 固體火箭技術, 2008, 31(1):79-85.
[9] 曹翠微, 陳偉民. 固體火箭發動機柔性接頭的結構分析[J]. 推進技術,2006, 27(5):450-454.
[10] 曹翠微, 陳偉民, 蔡體敏. 固體火箭發動機柔性接頭彈性件力學性能研究[J]. 宇航材料與工藝, 2005, 35(5): 36-41.
[11] 王雪坤, 王春光, 史宏斌. 柔性接頭彈性件壓縮剪切聯合加載試驗研究及數值分析[J]. 固體火箭技術, 2011, (34)3: 364-368.
[12] 王春光, 田維平, 史宏斌, 等. 彈性件剪切模量隨壓力變化的試驗分析[J]. 宇航材料工藝, 2011, 41(5): 81-86.
[13] 韓強. 彈塑性系統的動力屈曲和分叉[M]. 北京: 科學出版社, 2000.
[14] Alfano G, Crisfield M A. Solution strategies for the delamination analysis based on a combination of local control arc-length and line searches[C]. Sydney: Ιnternational of Journal Numerical Methods in Engineering, 2003.
[15] Souza D E, Neto E A, Feng Y T. On the determination of the path direction for arc-length methods in the presence of bifurcations and snapbacks[J]. Computer Methods in Applied Mechanics and Engineering, 1990, 179(1-2):81-89.
[16] 劉文光. 橡膠隔震支座力學性能及隔震結構地震反應分析研究[D]. 北京: 北京工業大學, 2003.
Research on the Buckling Response of the Flexible Joint Based on Risks Method
Huang Chao-hui1, Zhang Xiao2, Liu Wei-kai1
(1. The Fourth Academy of CASC, Xi′an, 710025; 2. Academy of Aerospace Solid Propulsion Technology, Xi′an, 710025)
The mechanism of the deflection torque of the flexible joint decrease with enhancing pressure has never been resolved. Just say the shear stress has changed can not be convincing. The structure of the flexible joint are analyzed, the real reason for the deflection torque of the flexible joint decrease is that it would be buckling when it bearing the deflection and pressure at the same time. The risks method is analyzed and used in this paper, the buckling process of the flexible joint is simulated by ABAQUS. The risks method and static general method are used to simulate the different processes of different pre-angle with enhancing pressure, the rules of pendulum angle changing with the enhancing pressure are got. The spring torque is got and had a good coherence with the test results. The method and conclusion in this paper will provide the beneficial reference for the design of the flexible joint in high-pressure work environment.
Solid rocket motor; Risks method; Flexible joint; Buckling response; Deflection torque
V435
A
1004-7182(2017)04-0102-06
DOΙ:10.7654/j.issn.1004-7182.20170423
2017-05-25;
2017-06-06
黃朝暉(1968-),女,高級工程師,主要研究方向為固體火箭發動機結構與強度研究
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
