信號交叉口行人空間分布與人車沖突行為分析
2017-09-03 10:10:04于瑞康趙暉
山東科學(xué) 2017年4期
于瑞康,趙暉
(北京交通大學(xué)交通運輸學(xué)院,北京 100044)
信號交叉口行人空間分布與人車沖突行為分析
于瑞康,趙暉*
(北京交通大學(xué)交通運輸學(xué)院,北京 100044)
人車沖突是影響城市道路信號交叉口通行能力的重要因素。本文通過選取典型信號交叉口,分析了過街行人堆積與右轉(zhuǎn)機動車之間的沖突行為。對北京市鬧市口大街和宣武門西大街的交叉口高峰時段進行了全程錄像,提取了行人等待和右轉(zhuǎn)車輛的空間分布特征數(shù)據(jù),并根據(jù)數(shù)據(jù)分析了影響機動車右轉(zhuǎn)的相關(guān)因素,通過線性回歸分析解釋了各影響因素與機動車延誤之間的關(guān)系。研究發(fā)現(xiàn),過街行人堆積的數(shù)量對右轉(zhuǎn)機動車延誤的影響最大,二者存在較強的線性關(guān)系。在今后的交通管理控制中,減少或避免人車沖突具有現(xiàn)實意義。
城市交通;人車沖突;線性回歸模型;行人空間分布特征;延誤
近年來,機動車與行人之間相互爭奪交通資源的矛盾越來越突出。其中,機動車與行人之間的相互干擾、沖突是其最直接、最典型的體現(xiàn)[1],直接導(dǎo)致了交通秩序的惡化和交通運行效率的低下,引發(fā)了擁擠、事故等一系列交通問題。在交叉口機動車與行人之間的沖突分為左轉(zhuǎn)彎交通沖突、右轉(zhuǎn)彎交通沖突和穿越交通沖突。本文主要針對典型信號交叉口行人堆積與右轉(zhuǎn)機動車沖突行為進行研究分析。
目前,國內(nèi)學(xué)者主要研究的是沖突中機動車和過街行人的運動狀態(tài)。陸斯文等[2]利用概率論方法研究了行人和機動車之間的交通沖突與碰撞微觀機理,分析了行人安全感知、駕駛?cè)朔磻?yīng)時間、車流量及車速等對行人安全造成的影響。利用視頻錄像分析的方法,王俊驊等[3]運用交通沖突技術(shù)理論和視頻錄像的方法,對上海市9個無信號交叉口進行了全程錄像,獲取了沖突過程中的車速變化過程、車輛運行軌跡變化過程及行人的避險行為,建立了非高峰小時的人車沖突次數(shù)預(yù)測模型,更為深入地分析了車流量、路段平均車速和行人流量對行人安全的影響作用,進一步解釋了人車沖突次數(shù)服從負二項分布的規(guī)律。此外,聶瑞紅等[4]運用人工計數(shù)的方法采集了人車沖突相關(guān)數(shù)據(jù),建立了違章行人數(shù)、行人綠信比、轉(zhuǎn)彎車流量與交通沖突發(fā)生數(shù)量的關(guān)系模型,得出了沖突數(shù)與違章性人數(shù)、轉(zhuǎn)彎機動車流量成正比的結(jié)論。國外對行人與左轉(zhuǎn)機動車沖突的研究居多,對行人與右轉(zhuǎn)機動車沖突的研究相對較少。其中,Leden[5]對HamiIton市的300個信號交叉口的行人和機動車沖突數(shù)據(jù)進行了分析,發(fā)現(xiàn)行人流量越大,其危險系數(shù)越低;車流量越大,其危險系數(shù)越高,在此基礎(chǔ)上,得到了左轉(zhuǎn)車輛對過街行人的影響高于右轉(zhuǎn)車輛的結(jié)論。Cheng等[6]運用視頻錄像采集行人與左轉(zhuǎn)機動車沖突行為數(shù)據(jù),分析了人車沖突行為的影響因素,在此基礎(chǔ)上提出了評價行人安全性的沖突指數(shù)模型(SCI)。此外,Almodfer等[7]通過視頻錄像分析了較短的行人等待時間和較小的等待區(qū)域?qū)θ塑嚊_突具有顯著影響。但至今,國內(nèi)外學(xué)者在行人空間分布與人車沖突方面的研究還很少。因此,本文通過視頻錄像分析了典型信號交叉口行人的空間分布特征和人車沖突規(guī)律,并就此沖突行為進行了建模分析,從而為行人交通管制提供依據(jù),目的是提高出行效率。
1 行人與右轉(zhuǎn)機動車駕駛員心理、行為特性分析
1.1 行人過街行為特性分析
當(dāng)行人到達人行橫道時,首先判別人行道信號燈的顏色,紅燈亮起時,行人選擇停在交叉口進行等待,隨后判斷當(dāng)前交叉口的機動車行駛狀態(tài)。根據(jù)交叉口機動車數(shù)量的不同,行人過街行為分為3種情況[8]:當(dāng)機動車數(shù)量較多時,行人會選擇提前停下等待,遠離交叉口以保證自己的人身安全;當(dāng)機動車數(shù)量處于可接受的安全范圍時,行人會盡可能靠近目的地以便信號燈變成綠燈后盡快通過交叉口;當(dāng)機動車數(shù)量較少時,少部分行人會伺機闖紅燈以通過交叉口。
1.2 行人過街心理特性分析
行人在參與交通時,完全依靠自身的主觀認知和判斷完成過街行為,而且由于行人沒有保護裝置,容易受到外界傷害,屬于城市交通參與者中的弱者,發(fā)生交通事故時往往受害最嚴(yán)重。而行人在通過交叉口的過程中,因存在以下心理而對自己的人身安全造成威脅:
(1)自我心理:過街行人在“自我為中心”的心理支配下,過分依賴機動車駕駛員的守法行駛,從而做出錯誤判斷。
(2)節(jié)省心理:等待信號燈的行人往往由于為了節(jié)省時間而盡可能地靠近目的地,而不在規(guī)定的斑馬線前等待,導(dǎo)致行人等待區(qū)域的不規(guī)則和面積的擴大,增加行人自身的危險,也對機動車交通產(chǎn)生一定的影響。
(3)從眾心理:行人結(jié)伴而行或者等待區(qū)域存在其他行人時,在從眾心理支配下,往往互相以對方為依賴,產(chǎn)生盲目的安全感,忽視交通安全而導(dǎo)致交通擁擠甚至交通事故[9]。
1.3 右轉(zhuǎn)彎機動車駕駛員行為心理特性分析
在現(xiàn)行的平面交叉口管理體系中,與過街行人相比,右轉(zhuǎn)機動車是交通參與者中的強者,這種交通地位難免會導(dǎo)致機動車駕駛員產(chǎn)生僥幸心理和輕視心理,使得駕駛員對道路信息理解不正確,錯誤地認為行人會自覺避讓機動車。但機動車右轉(zhuǎn)時從等待行人的后方出現(xiàn),大部分行人往往忽視身后的交通狀況,只是專注于信號燈的變化,此時右轉(zhuǎn)機動車與行人間的沖突加劇,更容易導(dǎo)致交通擁擠和交通事故[10]。
2 行人與右轉(zhuǎn)機動車沖突數(shù)據(jù)采集
右轉(zhuǎn)機動車和過街行人之間的沖突發(fā)生的交叉口具有以下特征:(1)交叉口行人流量較大,信號燈變?yōu)榧t燈時,等待的行人可以在短時間內(nèi)聚集;(2)交叉口設(shè)有綠化帶等車道隔離設(shè)施,過街行人盡可能接近目的地而在綠化帶附近等待;(3)交叉口未設(shè)置右轉(zhuǎn)輔道,右轉(zhuǎn)機動車未能避開等待的行人。
為了獲得典型交叉口行人空間分布與人車沖突的基礎(chǔ)數(shù)據(jù),在鬧市口大街和宣武門西大街的交叉口進行視頻拍攝。該交叉口由北向南方向為五車道,其中有兩條右轉(zhuǎn)車道,且右轉(zhuǎn)車道設(shè)有右轉(zhuǎn)信號燈。非機動車道與機動車道由綠化帶分隔開。圖1為拍攝交叉口平面圖,交叉口填充部分為綠化帶,箭頭為機動車右轉(zhuǎn)軌跡,矩形框部分為二者的沖突區(qū)域。拍攝時間是2015年11月30日早高峰時段7:15—8:45和晚高峰時段16:00—18:00。

圖1 拍攝交叉口平面圖Fig.1 Intersection plan taken by video
以人行道的一次紅綠燈變換為一個時間周期進行數(shù)據(jù)統(tǒng)計,統(tǒng)計的數(shù)據(jù)包括:
(1)右轉(zhuǎn)標(biāo)準(zhǔn)小汽車數(shù)量P(輛):一個時間周期內(nèi),在所研究的交叉口方向進行右轉(zhuǎn)的車輛換算成標(biāo)準(zhǔn)小汽車的數(shù)量。
(2)行人聚集時間t(s):一個時間周期內(nèi),從第一個行人開始等待紅燈至所有行人開始穿過交叉口經(jīng)過的時間。
(3)行人數(shù)量Q(人):一個時間周期內(nèi),在交叉口等待的行人總數(shù)量。
(4)行人等待時分布最遠距離L(m):一個時間周期內(nèi),在交叉口等待的行人中,離欄桿或者綠化帶的最遠距離。
(5)車輛延誤時間T(s):一個時間周期內(nèi),有行人等待時車輛右轉(zhuǎn)所花費的平均時間減去沒有行人等待紅燈時車輛右轉(zhuǎn)所花費的平均時間。
3 人車沖突數(shù)據(jù)的統(tǒng)計和分析
3.1 數(shù)據(jù)標(biāo)準(zhǔn)化(歸一化)


(1)
其中Xmax為樣本數(shù)據(jù)的最大值,Xmin為樣本數(shù)據(jù)的最小值。
3.2 人車沖突表征變量相關(guān)關(guān)系分析
對上述歸一化之后的數(shù)據(jù)進行變量間關(guān)系的分析,并用SPSS軟件進行圖像的描繪以及函數(shù)的擬合,分析變量之間可能存在的關(guān)系。
3.2.1 車輛延誤時間和人群數(shù)量
對車輛延誤時間和人群數(shù)量通過繪制散點圖進行描繪,得到對應(yīng)的T-Q圖形(圖2),縱軸表示車輛延誤時間,橫坐標(biāo)表示人群數(shù)量。平均車輛延誤時間和人群數(shù)量存在較強的正相關(guān)關(guān)系,二者的相關(guān)系數(shù)為0.726,存在線性關(guān)系。根據(jù)行人過街行為及心理分析結(jié)果,等待紅燈的行人在“節(jié)省心理”的驅(qū)使下,根據(jù)機動車的數(shù)量做出判斷,盡可能地靠近目的地以尋找機會伺機穿越路口。因此,等待紅燈時的行人堆積越多,少部分的行人會從一定程度上引起其他行人的盲從,行人的分布就越容易超出斑馬線,對右轉(zhuǎn)車輛造成的影響越大,車輛延誤時間也就越長[11]。
3.2.2 車輛延誤時間和行人分布最遠距離
為了更清楚地表現(xiàn)車輛延誤時間與人群分布最遠距離的關(guān)系,將歸一化人群分布距離分成5組,組距為0.2,對車輛延誤時間和行人分布最遠距離用直方圖圖進行描繪,得到相應(yīng)的T-L圖形(圖3)。由圖3可知,車輛延誤時間和人群分布最遠距離大致呈負二項分布關(guān)系,當(dāng)行人分布最遠距離較小時,行人整體分布靠近斑馬線而遠離機動車右轉(zhuǎn)軌跡,所以人與車的沖突很小,車輛延誤時間就很短。隨著最遠距離的增加,行人的分布不斷侵占機動車右轉(zhuǎn)軌跡,影響機動車右轉(zhuǎn),所以車輛延誤時間也隨之增加;當(dāng)分布最遠距離繼續(xù)增大時,由于行人的數(shù)量有限,人與人之間的間隙較大,機動車駕駛員會選擇直接從行人間空隙穿過,所以車輛延誤時間也很小[12]。
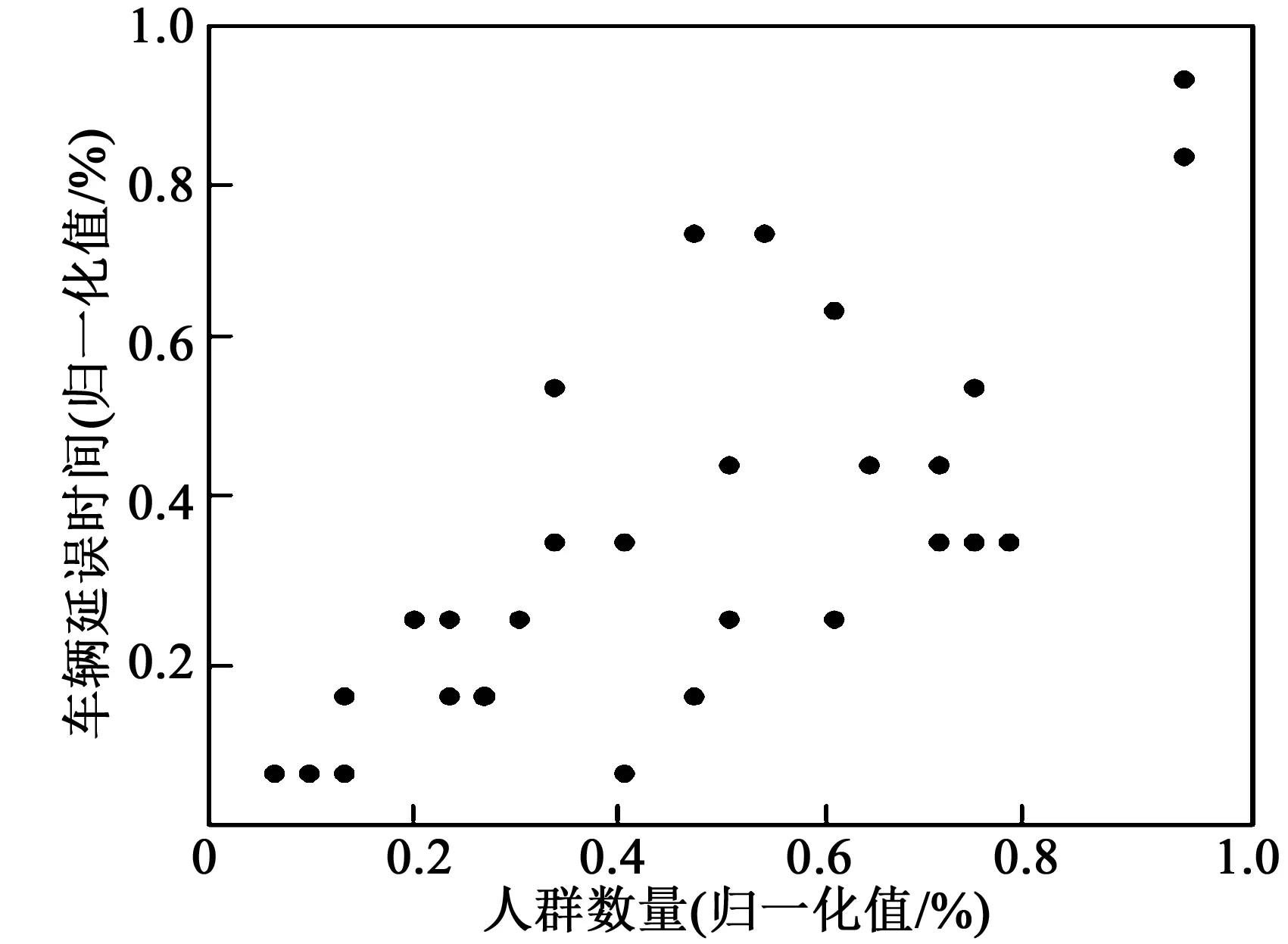
圖2 車輛延誤時間和人群數(shù)量散點圖Fig.2 Scatter diagram of vehicle delay time and pedestrian numbers

圖3 車輛延誤時間和行人分布最遠距離直方圖Fig.3 Histogram of vehicle delay time and the maximum distance of pedestrian distribution
3.2.3 行人數(shù)量和行人分布最遠距離
同樣的,將歸一化人群數(shù)量分為5組,組距0.2。對歸一化后的行人數(shù)量和行人分布最遠距離用直方圖描繪,得到相應(yīng)的L-Q圖形(圖4),縱坐標(biāo)表示行人分布最遠距離,橫坐標(biāo)表示行人的數(shù)量。由圖4可知,行人分布最遠距離隨著行人數(shù)量的增多而變大。由于行人在等待紅燈時的分布形態(tài)為一條直線型,所以行人越多,直線的長度越長,行人離斑馬線的最遠距離也就越大。但是當(dāng)?shù)却t燈的行人聚集的足夠多時,其最遠分布距離不可能無限增大,由于受到右轉(zhuǎn)車輛的影響,行人的分布會向靠近斑馬線一側(cè)靠攏,所以其最遠分布距離會有一定程度的減少。

圖4 人群分布最遠距離和人群數(shù)量直方圖Fig.4 Histogram of maximum distance of pedestrian distribution and pedestrian numbers
3.3 逐步線性回歸分析
考慮到各個影響因素之間的相互關(guān)系以及各自權(quán)重的不同,對數(shù)據(jù)進行逐步線性回歸分析。運用SPSS軟件將P,t,Q,L選為自變量,T選為因變量。

表1 回歸模型參數(shù)表
從表1可以看出,回歸模型中常量的顯著性參數(shù)大于0.05,故常數(shù)項均不具備顯著性,且常量的標(biāo)準(zhǔn)系數(shù)都沒有數(shù)值,故常數(shù)項被剔除。
將回歸模型的參數(shù)帶入模型公式中得到回歸公式為
T=0.709Q。
(2)
按歸一化的公式將上述公式進行還原得到以下公式
T=0.245Q-1.227。
(3)
公式(2)中T是表示車輛延誤時間的歸一化值的變量,Q是表示行人數(shù)量的歸一化值的變量,T與Q是一次函數(shù)關(guān)系,并且Q的系數(shù)是正值0.245,表示T與Q是成正相關(guān)的,即車輛延誤時間會隨著行人數(shù)量的增大而變大。這說明當(dāng)?shù)却t燈的行人數(shù)量逐漸增多時,根據(jù)對行人過街心理行為特征的分析結(jié)果,行人會在從眾心理的支配下,互相以對方為依賴,產(chǎn)生盲目的安全感,集聚到一定規(guī)模時與右轉(zhuǎn)機動車發(fā)生嚴(yán)重的沖突。但從右轉(zhuǎn)機動車駕駛員角度分析,由于機動車和行人的交通地位不同,機動車駕駛員自視為交通參與者中的強者,這難免會導(dǎo)致機動車駕駛員產(chǎn)生僥幸心理和輕視心理[13]。這種心理使得駕駛員對道路信息理解不正確,錯誤地認為行人會自覺避讓機動車,從而使機動車和行人陷入進退兩難的境地,增加了車輛的延誤時間。
而行人分布最遠距離,行人聚集時間,右轉(zhuǎn)汽車的數(shù)量并沒有進入回歸方程,筆者分析,行人分布最遠距離對車輛延誤時間的影響存在不確定性,人群分布越遠,右轉(zhuǎn)的機動車可從人群間隙中穿過,從而導(dǎo)致車輛延誤時間的縮短。實地調(diào)查發(fā)現(xiàn),相同數(shù)量的行人聚集的時間長短相差較大,行人聚集時間對機動車延誤的影響并不大,回歸結(jié)果與實際情況相符。而右轉(zhuǎn)車輛的數(shù)量與車輛的延誤時間的關(guān)系影響也不顯著,可能的原因是,現(xiàn)場右轉(zhuǎn)小汽車的流量較小,并沒有發(fā)生排隊現(xiàn)象,以后的調(diào)查中應(yīng)豐富調(diào)查數(shù)據(jù),進一步研究其影響。
此公式有信號燈周期時間和行人流量的限制。因為在一個信號燈周期的限制下,進入路口等待的行人數(shù)量是限定在一個范圍內(nèi)的,即行人數(shù)量不能無窮增大,行人的聚集數(shù)量存在一個最大值,即Q有一定的約束范圍。
4 結(jié)論和建議
通過對行人等待紅綠燈時的空間分布特征與人車沖突行為的分析,確定了導(dǎo)致人車發(fā)生沖突的因素,采用描述性統(tǒng)計分析與線性回歸方法定量分析了這些因素之間以及與機動車延誤之間的關(guān)系。通過上述研究發(fā)現(xiàn),等待紅燈的行人數(shù)量與車輛延誤時間呈現(xiàn)正相關(guān)關(guān)系,人群分布距離在一定的范圍內(nèi)會造成車輛延誤時間的增加,但當(dāng)人群分布距離增加到一定程度時,車輛會利用人群間隙穿越,此時車輛延誤時間會減少。等待紅燈的行人的數(shù)量對車輛的延誤造成的影響最大,二者存在較強的線性相關(guān)關(guān)系。當(dāng)?shù)却t燈的行人堆積越多時,行人的分布就越容易超出斑馬線,對右轉(zhuǎn)車輛造成的影響越大,車輛延誤時間也就越長。
針對這種問題,在今后的交通管理控制與規(guī)劃建設(shè)中,提出了幾點建議:
(1)優(yōu)化紅綠燈的信號相位,由文中得到的數(shù)據(jù)分析結(jié)果可得,行人數(shù)量直接關(guān)系到機動車延誤時間的長短。因此減少行人數(shù)量,從根本上減少行人等待區(qū)域與機動車右轉(zhuǎn)軌跡的重疊部分,可以有效減輕人車沖突的嚴(yán)重程度,緩解沖突。
(2)在交叉口設(shè)立交警或者志愿者維護秩序,規(guī)范行人等待紅綠燈的區(qū)域,將行人的分布形態(tài)壓縮,不再形成一條直線而是壓縮成多條直線以減少直線距離,從而緩解人車沖突。
(3)交叉口設(shè)置右轉(zhuǎn)輔道,右轉(zhuǎn)機動車不再直接從交叉口進行右轉(zhuǎn)。將機動車右轉(zhuǎn)車道與行人等待紅燈區(qū)域完全隔離開,以達到消除沖突點的目的。
(4)規(guī)劃街道時,在交叉口設(shè)置過街天橋或者地下通道。將行人、非機動車、機動車從同一平面上分隔到不同平面上,對交叉點進行立體疏解。
[1]張?zhí)K. 中國交通沖突技術(shù)[M]. 北京: 人民交通出版社, 2000.
[2]陸斯文, 方守恩, 李剛. 城市道路人車沖突和碰撞概率微觀模型研究[J]. 同濟大學(xué)學(xué)報(自然科學(xué)版),2009, 37(12): 1627-1632.
[3]王俊驊, 方守恩. 行人機動車沖突模型及其行人過街風(fēng)險控制應(yīng)用[J]. 同濟大學(xué)學(xué)報(自然科學(xué)版), 2009, 37(9): 1191-1195.
[4]聶瑞紅, 程建川. 基于交通沖突技術(shù)的行人安全分析與改善[J]. 交通信息與安全, 2012, 30(3): 105-109.
[5]LEDEN L. Pedestrian risk decrease with pedestrian flow. A case study based on data from signalized intersections in Hamilton, Ontario [J]. Accident Analysis & Prevention, 2002, 34(4): 457-464.
[6]CHENG W, ZHANG N, LI W, et al. Modeling and application of pedestrian safety conflict index at signalized intersections [J]. Discrete Dynamics in Nature and Society, 2014, 2014:314207.
[7]ALMODFER R, XIONG S, FANG Z, et al. Quantitative analysis of lane-based pedestrian-vehicle conflict at a non-signalized markedcrosswalk [J]. Transportation research part F: traffic psychology and behavior, 2016, 42: 468-478.
[8]景超. 行人過街交通特性研究[D]. 長春: 吉林大學(xué), 2007.
[9]劉勝洪. 無信號控制城市行人過街交通特性研究[D]. 重慶: 重慶交通大學(xué), 2008.
[10]尹巖,馬社強. 過街行人的交通特性及對策研究[J]. 交通科技與經(jīng)濟, 2013, 15(6):18-22.
[11]吳昌旭, 馬舒, 莊想靈. 行人過街的認知心理過程和模型[J]. 心理科學(xué)進展, 2013, 21(7): 1141-1149.
[12]錢大琳, 黃迪. 信號平交路口右轉(zhuǎn)機動車穿越直行自行車決策行為研究[J]. 系統(tǒng)工程理論與實踐, 2006, 26(5): 140-144.
[13]周雪峰, 鄭長江. 基于博弈論的無控制路段人行橫道處人車搶行分析[J]. 華東交通大學(xué)學(xué)報, 2012, 29(6): 65-69.
Analysis of pedestrian spatial distribution and pedestrian-vehicle conflict behavior at signalized intersection
YU Rui-kang,ZHAO Hui*
(School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China)
∶Pedestrian-vehicle conflict is an important factor affecting the traffic capacity of signalized intersections in urban roads. By selecting typical signalized intersections, the conflict behavior between pedestrian stacking and right-turning vehicles was analyzed in this paper. Traffic states of the intersection at Beijing Naoshikou street and Xuanwu gate west street were videotaped during peak hours. Based on the captured video recording, the spatial distribution characteristic data of the waiting pedestrians and right-turning vehicle were extracted. According to the data, the related factors that influence the right turn of motor vehicle were analyzed. And the relationship between the various factors and vehicle delay was explained by linear regression analysis. Studies found that the number of pedestrians piled up has the greatest impact on the delay of right-turning vehicle and there is a strong linear relationship between them. It is of practical significance to reduce or avoid the conflict between pedestrian and vehicle in the future traffic management control.
∶urban traffic; pedestrian-vehicle conflict; linear regression model; spatial distribution characteristics of pedestrians; delay
10.3976/j.issn.1002-4026.2017.04.013
2016-11-01
國家自然科學(xué)基金(71371028);中央高校基本科研業(yè)務(wù)費(2015JBM049)。
于瑞康(1992—),男,碩士,研究方向為道路交通安全統(tǒng)計。
*通信作者。E-mail:zhaoh@bjtu.edu.cn
U491.2+65
A
1002-4026(2017)04-0080-06
