變PID參數(shù)法在電廠自動(dòng)發(fā)電控制中的應(yīng)用
2017-09-04 01:33:41楊大錨
綜合智慧能源 2017年8期
關(guān)鍵詞:調(diào)節(jié)閥指令
楊大錨
(華能國(guó)際電力開發(fā)公司銅川照金電廠,陜西 銅川 727100)
變PID參數(shù)法在電廠自動(dòng)發(fā)電控制中的應(yīng)用
楊大錨
(華能國(guó)際電力開發(fā)公司銅川照金電廠,陜西 銅川 727100)
華能國(guó)際電力開發(fā)公司銅川照金電廠2×600 MW機(jī)組在自動(dòng)發(fā)電控制(AGC)方式下升降負(fù)荷時(shí),存在主蒸汽壓力波動(dòng)大的問題。針對(duì)機(jī)組協(xié)調(diào)控制品質(zhì)差的問題,在汽機(jī)主控邏輯中設(shè)計(jì)了一套變比例、積分、微分(PID)參數(shù)的功能塊,并合理設(shè)置該功能塊中的比例增益和積分時(shí)間,保證在AGC方式下機(jī)組能以較快的速度升降負(fù)荷,且能將主蒸汽壓力偏差控制在允許范圍內(nèi)。
變負(fù)荷;汽機(jī)主控;變參數(shù);主蒸汽壓力
0 引言
華能國(guó)際電力開發(fā)公司銅川照金電廠裝機(jī)容量為2臺(tái)600 MW亞臨界機(jī)組,鍋爐為哈爾濱鍋爐廠有限責(zé)任公司生產(chǎn)的汽包爐,采用四角切圓燃燒,磨煤機(jī)為直吹式,鍋爐慣性較大,汽包蓄熱較少。汽輪機(jī)為東方汽輪機(jī)有限公司產(chǎn)品,單閥控制,滑壓運(yùn)行方式。自2014年陜西電網(wǎng)要求該廠投入自動(dòng)發(fā)電控制(AGC)系統(tǒng)后,由于負(fù)荷指令變動(dòng)較為頻繁,且電網(wǎng)要求的變負(fù)荷速度較快,該電廠2臺(tái)機(jī)組均存在升降負(fù)荷時(shí)主蒸汽壓力波動(dòng)較大的問題,嚴(yán)重影響機(jī)組的安全、穩(wěn)定運(yùn)行。
1 機(jī)組升降負(fù)荷時(shí)存在的問題
該電廠2臺(tái)機(jī)組升降負(fù)荷時(shí)存在的情況相同,本文以#1機(jī)組為例進(jìn)行說明。機(jī)組升降負(fù)荷時(shí),由于運(yùn)行工況不盡相同,主要參數(shù)的變化也不同。如早晚高峰期機(jī)組在AGC方式下以較高速率大范圍升負(fù)荷時(shí),在升負(fù)荷的初始階段,如果主蒸汽壓力高于或等于設(shè)定值,負(fù)荷指令增加后使得汽機(jī)主控按照一定的比例-積分-微分(PID)參數(shù)進(jìn)行調(diào)節(jié),調(diào)節(jié)的方向是汽機(jī)調(diào)節(jié)閥逐漸開大,實(shí)際負(fù)荷會(huì)較快跟隨AGC負(fù)荷指令,主蒸汽壓力與設(shè)定壓力在整個(gè)過程中偏差不大;如果主蒸汽壓力低于設(shè)定值較多或仍然有下降趨勢(shì),負(fù)荷指令增加后汽機(jī)主控仍舊按照一定的PID參數(shù)進(jìn)行調(diào)節(jié),調(diào)節(jié)速度即汽機(jī)調(diào)節(jié)閥開啟的速度與主蒸汽壓力高于或等于壓力設(shè)定值時(shí)相同,實(shí)際負(fù)荷跟隨AGC負(fù)荷指令的速度會(huì)較慢,且隨著閥門的開大,主蒸汽壓力的實(shí)際值會(huì)有下降的趨勢(shì),由于機(jī)組是滑壓運(yùn)行,主蒸汽壓力的設(shè)定值隨著負(fù)荷指令的升高逐漸升高,導(dǎo)致主蒸汽壓力的設(shè)定值與實(shí)際值的偏差增大,使得實(shí)際負(fù)荷跟隨AGC負(fù)荷指令的速度變得更慢。由于該電廠鍋爐的滯后很大,因主蒸汽壓力減小而增加的煤量不能立即使主蒸汽壓力提高,因此,由于主蒸汽壓力的偏差增大,鍋爐的總煤量增加了很多,當(dāng)增加的煤量充分燃燒后主蒸汽壓力會(huì)迅速升高,導(dǎo)致升負(fù)荷后期主蒸汽壓力高于設(shè)定壓力較多[1];同時(shí),實(shí)際負(fù)荷高于AGC負(fù)荷指令較多,接下來汽機(jī)調(diào)節(jié)閥快速關(guān)小,主蒸汽壓力會(huì)有繼續(xù)憋高的趨勢(shì),這種情況在高負(fù)荷時(shí)非常危險(xiǎn),如果不及時(shí)解除協(xié)調(diào)控制,機(jī)組主蒸汽壓力很可能會(huì)超壓,存在很大的安全隱患,影響機(jī)組的穩(wěn)定運(yùn)行。同理,在機(jī)組以較高速率大范圍降負(fù)荷時(shí),如果主蒸汽壓力高于設(shè)定值較多或有繼續(xù)升高的趨勢(shì),汽機(jī)調(diào)節(jié)閥的快速關(guān)小會(huì)導(dǎo)致主蒸汽壓力憋高,實(shí)際負(fù)荷跟隨AGC負(fù)荷指令的速度會(huì)較慢;由于機(jī)組是滑壓運(yùn)行,主蒸汽壓力的設(shè)定值隨著負(fù)荷指令的下降逐漸下降,會(huì)導(dǎo)致主蒸汽壓力設(shè)定值與實(shí)際值的偏差增大,總煤量會(huì)減少很多,在降負(fù)荷后期主蒸汽壓力低于設(shè)定值很多,負(fù)荷實(shí)際值低于負(fù)荷設(shè)定值較多;接下來汽機(jī)調(diào)節(jié)閥快速開大,主蒸汽壓力會(huì)有繼續(xù)下降的趨勢(shì),整個(gè)過程壓力和負(fù)荷都控制得不好,還會(huì)導(dǎo)致汽溫等參數(shù)大大偏離正常值。
2 控制策略
針對(duì)這種情況,通過分析每次升降負(fù)荷時(shí)的協(xié)調(diào)控制曲線,該電廠熱控專業(yè)設(shè)計(jì)了一套汽機(jī)主控變PID控制策略,即變比例增益P和積分時(shí)間T。該策略的核心思想為:在AGC方式下升降負(fù)荷時(shí),根據(jù)主蒸汽壓力與設(shè)定壓力的偏差修正汽機(jī)主控的P和T,從而改變汽機(jī)調(diào)節(jié)閥開度的變化速度,當(dāng)升負(fù)荷主蒸汽壓力高于設(shè)定值時(shí),要求汽機(jī)調(diào)節(jié)閥以較高的速度開啟,當(dāng)升負(fù)荷主蒸汽壓力低于設(shè)定值時(shí),要求汽機(jī)調(diào)節(jié)閥以較低的速度開啟;當(dāng)降負(fù)荷主蒸汽壓力高于設(shè)定值時(shí),要求汽機(jī)調(diào)節(jié)閥以較慢的速度關(guān)小,當(dāng)降負(fù)荷主蒸汽壓力低于設(shè)定值時(shí),要求汽機(jī)調(diào)節(jié)閥以較快的速度關(guān)小。汽機(jī)調(diào)節(jié)閥開啟和關(guān)小的具體速度靠汽機(jī)主控的P和T來實(shí)現(xiàn),其均設(shè)計(jì)為穩(wěn)態(tài)和動(dòng)態(tài)2部分,穩(wěn)態(tài)是指負(fù)荷穩(wěn)定的狀態(tài),動(dòng)態(tài)是指升降負(fù)荷時(shí)的狀態(tài),穩(wěn)態(tài)與動(dòng)態(tài)的P相加得到汽機(jī)主控調(diào)節(jié)器的P,穩(wěn)態(tài)與動(dòng)態(tài)的T相加得到汽機(jī)主控調(diào)節(jié)器的T[2-3]。動(dòng)態(tài)的P和T在汽機(jī)主控邏輯中通過函數(shù)模塊來實(shí)現(xiàn),函數(shù)模塊的輸入為主蒸汽壓力實(shí)際值與設(shè)定值的偏差,輸出為汽機(jī)主控的動(dòng)態(tài)P和T。
3 汽機(jī)主控中P和T的函數(shù)
在分散控制系統(tǒng)(DCS)邏輯中,汽機(jī)主控的穩(wěn)態(tài)和升降負(fù)荷時(shí)的P,T通過采用幾套不同的函數(shù)來實(shí)現(xiàn)變化的功能,函數(shù)中的數(shù)值可以通過表格的形式體現(xiàn)。表1為穩(wěn)態(tài)時(shí)不同負(fù)荷指令對(duì)應(yīng)的汽機(jī)主控調(diào)節(jié)器的P和T,從表1可以看出,隨著負(fù)荷指令的升高,P逐漸減小,T逐漸加大,即比例作用和積分作用均減小,這種改變是從高負(fù)荷時(shí)穩(wěn)定主蒸汽壓力的角度考慮的。
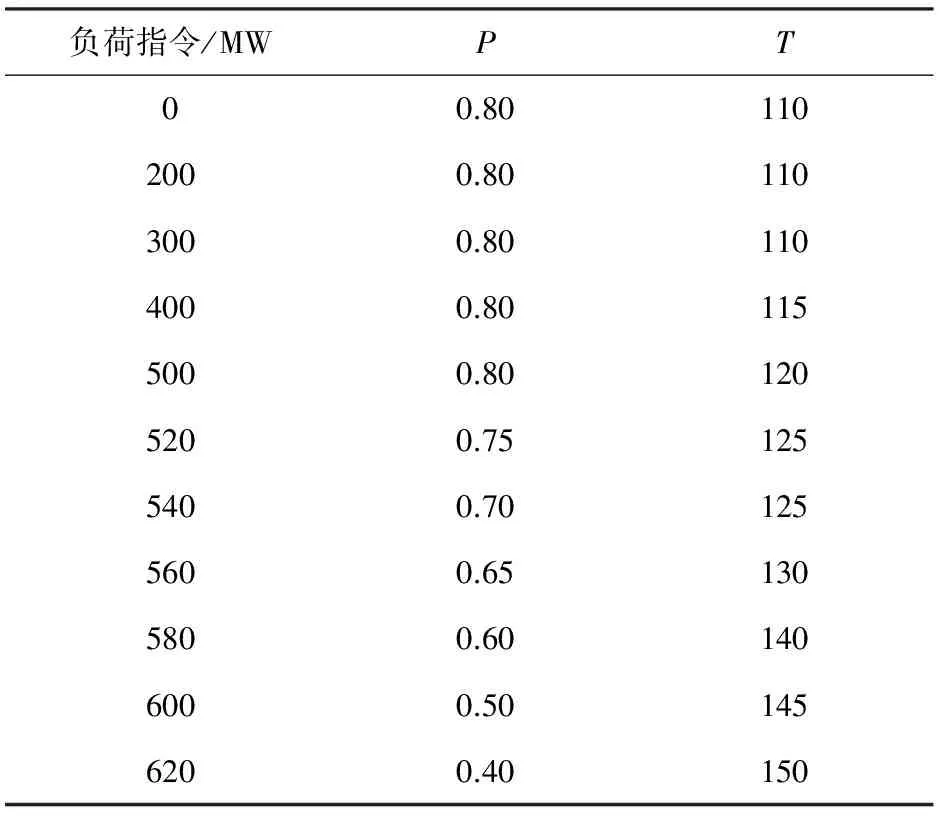
表1 穩(wěn)態(tài)時(shí)不同負(fù)荷指令對(duì)應(yīng)的汽機(jī)主控調(diào)節(jié)器P和T
表2為升負(fù)荷時(shí)主蒸汽壓力設(shè)定值與實(shí)際值之差對(duì)應(yīng)的汽機(jī)主控調(diào)節(jié)器的P和T,從表2可以看出:升負(fù)荷時(shí)主蒸汽壓力越高,P越大,T越小,即比例和積分的作用越強(qiáng);升負(fù)荷時(shí)主蒸汽壓力越低,P越小,T越大,即比例和積分作用越弱。表中數(shù)值為熱控人員通過分析協(xié)調(diào)控制曲線,經(jīng)多次修改參數(shù)后得出,下同。

表2 升負(fù)荷時(shí)參數(shù)設(shè)置與調(diào)整
表3為降負(fù)荷時(shí)主蒸汽壓力設(shè)定值與實(shí)際值之差對(duì)應(yīng)的汽機(jī)主控調(diào)節(jié)器P和T,從表3可以看出:降負(fù)荷時(shí)主蒸汽壓力越高,P越小,T越大,即比例和積分的作用越弱;降負(fù)荷時(shí)主蒸汽壓力越低,P越大,T越小,即比例和積分作用越強(qiáng)。
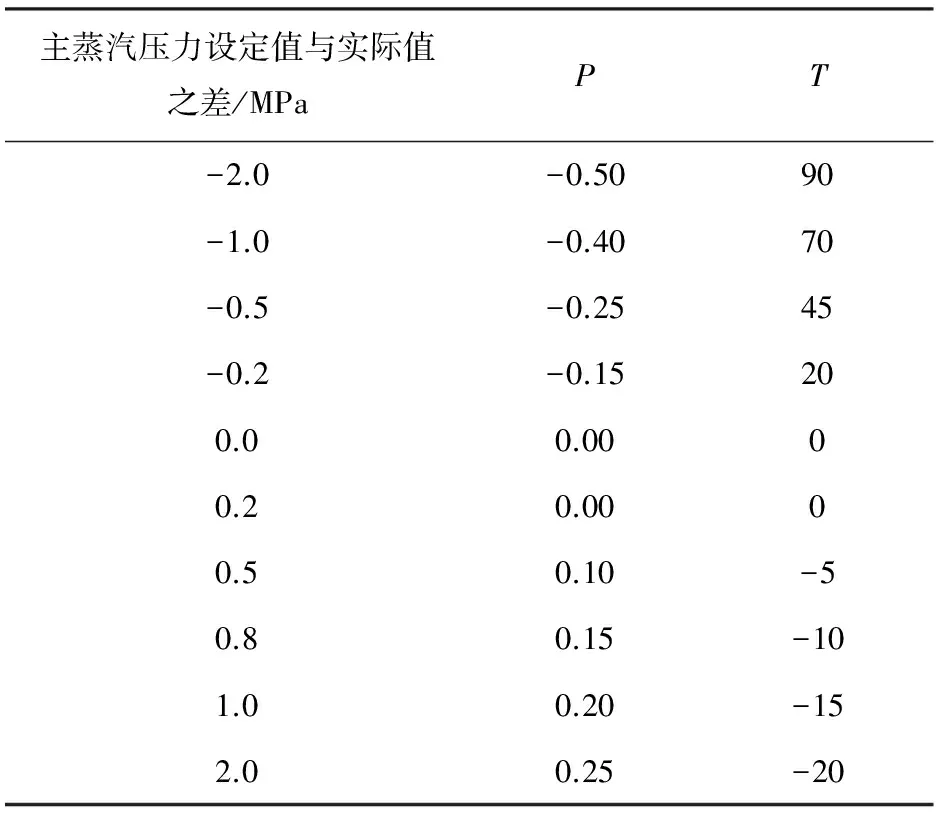
表3 降負(fù)荷時(shí)參數(shù)設(shè)置與調(diào)整
4 升負(fù)荷時(shí)動(dòng)態(tài)P和T的邏輯實(shí)現(xiàn)
圖1為升負(fù)荷時(shí)動(dòng)態(tài)P和T邏輯圖,圖中:LDCSP為負(fù)荷指令;SELGENMW為實(shí)際負(fù)荷;MWSP為負(fù)荷指令計(jì)算值,即負(fù)荷指令經(jīng)過機(jī)組協(xié)調(diào)控制系統(tǒng)(CCS)側(cè)一次調(diào)頻疊加后作為汽機(jī)主控調(diào)節(jié)器設(shè)定值的負(fù)荷指令;MAINPRESS為主蒸汽壓力;MAINPRESSSP為主蒸汽壓力設(shè)定值;SELRATE為升降負(fù)荷指令的開關(guān)量;TOTMP4為升負(fù)荷時(shí)的動(dòng)態(tài)P,TOTMT4代表升負(fù)荷時(shí)的動(dòng)態(tài)T。邏輯中的2個(gè)函數(shù)f(x)分別為主蒸汽壓力的偏差與動(dòng)態(tài)P和T的函數(shù),函數(shù)中的設(shè)置見表2。邏輯中設(shè)計(jì)了2個(gè)高選模塊:(1)LDCSP-SELGENMW值的高選,高選值設(shè)定為6 MW,且高選后有延時(shí)關(guān)的模塊;
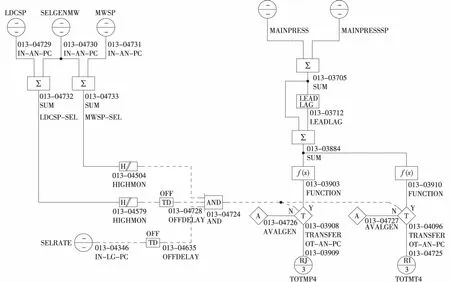
圖1 升負(fù)荷時(shí)動(dòng)態(tài)比例增益和積分時(shí)間邏輯
(2)MWSP-SELGENMW值的高選,高選值設(shè)定為4 MW。當(dāng)2個(gè)高選值均滿足且SELRATE=1的情況下邏輯中的與門出口為1,通過2個(gè)切換器取2個(gè)函數(shù)f(x)輸出,將計(jì)算出的TOTMP4和TOTMT4疊加到汽機(jī)主控的穩(wěn)態(tài)P和T上(見表1);實(shí)際負(fù)荷接近負(fù)荷指令后,邏輯中與門出口為0,2個(gè)切換器切至0,TOTMP4和TOTMT4將按照切換器設(shè)定好的速率由當(dāng)前值變?yōu)?,動(dòng)態(tài)比例和積分作用消失。例如:當(dāng)實(shí)際負(fù)荷SELGENMW在380 MW時(shí)升負(fù)荷,負(fù)荷指令LDCSP為400 MW,主蒸汽壓力的設(shè)定值為13.2 MPa,主蒸汽壓力實(shí)際值為13.7 MPa,主蒸汽壓力設(shè)定值與實(shí)際值之差為-0.5 MPa,根據(jù)表1和表2,穩(wěn)態(tài)P為0.80,穩(wěn)態(tài)T為115,動(dòng)態(tài)P為0.40,動(dòng)態(tài)T為-30,通過計(jì)算得出在升負(fù)荷初期作用到汽機(jī)主控調(diào)節(jié)器的P為1.20,T為85,使得汽機(jī)調(diào)節(jié)閥以較快的速度開啟,實(shí)際負(fù)荷能夠較快響應(yīng)負(fù)荷指令。當(dāng)升負(fù)荷過程中主蒸汽壓力偏差減小至-0.1 MPa時(shí),動(dòng)態(tài)P為0.25,動(dòng)態(tài)T為-10,調(diào)節(jié)閥的開啟速度較之前會(huì)有所減小,主蒸汽壓力下降的速度也會(huì)減慢,起到穩(wěn)定壓力的作用。當(dāng)實(shí)際負(fù)荷接近負(fù)荷指令時(shí),動(dòng)態(tài)P和T均為0,汽機(jī)主控調(diào)節(jié)器的P為0.80,T為115,回歸到穩(wěn)態(tài)值。
5 降負(fù)荷時(shí)動(dòng)態(tài)P和T的邏輯實(shí)現(xiàn)
圖2為降負(fù)荷時(shí)動(dòng)態(tài)P和T的邏輯圖,圖中: TOTMP5為降負(fù)荷時(shí)的動(dòng)態(tài)P;TOTMT5為降負(fù)荷時(shí)的動(dòng)態(tài)T。邏輯中的2個(gè)函數(shù)f(x)分別為主蒸汽壓力的偏差與動(dòng)態(tài)P和T的函數(shù),函數(shù)中的設(shè)置見表2。 邏輯中設(shè)計(jì)了2個(gè)低選模塊:(1)LDCSP-SELGENMW值的低選,低選值設(shè)定為-6 MW,且低選后有延時(shí)關(guān)的模塊;(2)MWSP-SELGENMW值的低選,低選值設(shè)定為-4 MW。當(dāng)2個(gè)低選值均滿足且SELRATE=1的情況下邏輯中的與門出口為1,通過2個(gè)切換器取2個(gè)函數(shù)f(x)輸出,將計(jì)算出的TOTMP5和TOTMT5疊加到汽機(jī)主控的穩(wěn)態(tài)P和T上,當(dāng)實(shí)際負(fù)荷接近負(fù)荷指令時(shí),邏輯中與門出口為0,2個(gè)切換器切至0,TOTMP5和TOTMT5將按照切換器設(shè)定好的速率由當(dāng)前值變?yōu)?,動(dòng)態(tài)比例和積分作用消失。例如:當(dāng)實(shí)際負(fù)荷SELGENMW在580 MW時(shí)降負(fù)荷,負(fù)荷指令LDCSP為560 MW,主蒸汽壓力的設(shè)定值為15.5 MPa,主蒸汽壓力實(shí)際值為16.5 MPa,主蒸汽壓力設(shè)定值與實(shí)際值之差為-1.0 MPa,根據(jù)表1和表3,穩(wěn)態(tài)P為0.65,穩(wěn)態(tài)T為130,動(dòng)態(tài)P為-0.40,動(dòng)態(tài)T為70,通過計(jì)算得出降負(fù)荷初期作用到汽機(jī)主控調(diào)節(jié)器的P為0.25,T為200,使得汽機(jī)調(diào)節(jié)閥以較慢的速度關(guān)小,防止主蒸汽壓力由于調(diào)節(jié)閥的快速開啟而被憋高,從而避免機(jī)組超壓。當(dāng)實(shí)際負(fù)荷接近負(fù)荷指令時(shí),動(dòng)態(tài)P和T均為0,汽機(jī)主控調(diào)節(jié)器的P和T回歸到穩(wěn)態(tài)值。
6 控制策略優(yōu)化后的升降負(fù)荷曲線
汽機(jī)主控控制策略優(yōu)化后,在AGC控制方式下,該電廠2臺(tái)機(jī)組均能夠以較高的速度升降負(fù)荷,且能將主蒸汽壓力偏差控制在允許范圍內(nèi)。圖3、圖4分別為升降負(fù)荷初期和后期的主要參數(shù)趨勢(shì),圖中:MAINPRESS為主蒸汽壓力實(shí)際值;MAINPESSSP為主蒸汽壓力設(shè)定值;10DCSFMYDAI001為電網(wǎng)AGC負(fù)荷指令;MWSP為負(fù)荷指令計(jì)算值,即負(fù)荷指令經(jīng)過CCS側(cè)一次調(diào)頻疊加后作為汽機(jī)主控調(diào)節(jié)器設(shè)定值的負(fù)荷指令;SELGENMW為實(shí)際負(fù)荷;BMOUT為鍋爐主控輸出;TMOUT為汽機(jī)主控輸出;TOTCOALFLOW為總煤量。

圖2 降負(fù)荷時(shí)動(dòng)態(tài)P和T邏輯
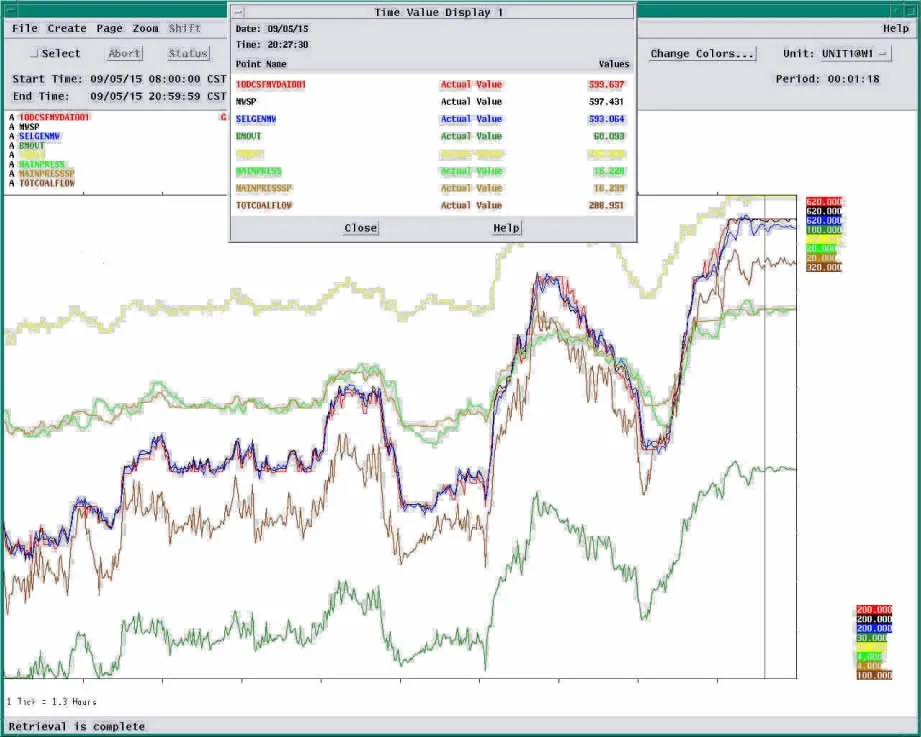
圖3 升降負(fù)荷初期(315 MW)主要參數(shù)趨勢(shì)

圖4 升降負(fù)荷后期(600 MW)主要參數(shù)趨勢(shì)
從圖3、圖4可以看出,08:11:00—20:10:00,電網(wǎng)AGC指令頻繁地升降負(fù)荷,#1機(jī)組實(shí)際負(fù)荷能夠較快地跟蹤負(fù)荷指令,主蒸汽壓力實(shí)際值與設(shè)定值偏差始終在允許范圍內(nèi),負(fù)荷變動(dòng)時(shí)最大偏差為0.58 MPa,負(fù)荷穩(wěn)定時(shí)最大偏差為0.30 MPa。
7 結(jié)束語(yǔ)
華能國(guó)際電力開發(fā)公司銅川照金電廠熱控專業(yè)在汽機(jī)主控邏輯中設(shè)計(jì)了一套變PID參數(shù)的功能塊,對(duì)機(jī)組協(xié)調(diào)控制起了積極的作用。在機(jī)組升降負(fù)荷時(shí)鍋爐側(cè)的預(yù)加減煤以及預(yù)加減一次風(fēng)壓對(duì)整個(gè)協(xié)調(diào)控制的作用是不能忽視的,正是這些作用與汽機(jī)主控調(diào)節(jié)閥動(dòng)作的相互協(xié)調(diào)和配合,才能保證在AGC方式下既能滿足電網(wǎng)要求的負(fù)荷響應(yīng)速度,又能保持機(jī)組主蒸汽壓力等重要參數(shù)在可控范圍內(nèi)。
[1]田亮,曾德良,劉吉臻,等.簡(jiǎn)化的330MW機(jī)組非線性動(dòng)態(tài)模型[J].中國(guó)電機(jī)工程學(xué)報(bào),2004,24(8):180-184.
[2]劉吉臻.協(xié)調(diào)控制與給水全程控制[M].北京:水利電力出版社,1995.
[3]房方,劉吉臻,譚文.火電單元機(jī)組協(xié)調(diào)控制系統(tǒng)的多變量IMC-PID設(shè)計(jì)[J].動(dòng)力工程,2004,24(3):360-365.
(本文責(zé)編:劉芳)
2017-05-29;
2017-07-14
TM 621.6
A
1674-1951(2017)08-0006-04
楊大錨(1977—),男,內(nèi)蒙古赤峰人,工程師,熱控專工,工學(xué)碩士,從事火電機(jī)組熱控及優(yōu)化方面的工作(E-mail:47773152@qq.com)。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
石油化工自動(dòng)化(2018年5期)2018-11-14 02:34:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
