一種小型無人機的航跡跟蹤算法
2017-09-08 14:06:34吳長勝
科技創新與應用 2017年24期
吳長勝
摘 要:航跡跟蹤算法是小型無人機航跡規劃的關鍵技術之一,為無人機姿態回路提供控制輸入。通過分析小型無人機的飛行模態,進行航跡跟蹤算法設計。利用Matlab進行仿真試驗驗證,此方案具有良好的航跡跟蹤性能。
關鍵詞:小型無人機;飛行模態;航跡跟蹤;仿真試驗
中圖分類號:V279 文獻標志碼:A 文章編號:2095-2945(2017)24-0004-02
引言
無人機要求其具有較強的自主飛行控制能力,以適應執行飛行任務的需要,航跡跟蹤是實現小型無人機按預定航線飛行或執行特定飛行模態的重要支撐技術,航跡跟蹤算法根據無人機姿態數據、當前位置、航線信息及對應航線的側偏距等飛行數據,引導無人機順利進入并穩定在預定的航跡上[1],通過自主導航、航跡跟蹤與姿態控制使無人機可靠執行飛行任務。
1 小型無人機飛行模態
在飛行過程中,無人機飛行模態主要包括航線飛行、定點盤旋、指點飛行、返航等[2]。航線由根據既定飛行任務制定的多個航點進行直連規劃的折線組成,航線飛行實現指定區域的巡察任務;定點盤旋進行固定目標的連續偵察或通過該模態提供指示任務;指點飛行根據臨時任務引導無人機到指定位置完成任務;返航是無人機以最優距離返回指定降落地點,實現無人機的回收任務。無人機在飛行過程中,根據任務性質可進行航線飛行、定點盤旋、指點飛行、返航等飛行模態的自由切換。
2 航跡跟蹤算法設計
航跡跟蹤算法通過機載GPS獲得無人機的當前位置,計算無人機偏離預期航線的側偏距,并結合無人機姿態信息,進行控制指令解算,通過姿態控制回路解算出執行機構控制量,從而消除無人機側偏距并修正飛行航跡[3][4],實現無人機空中航線飛行、定點盤旋、指點飛行及返航等飛行模態。
2.1 航線飛行
無人機航線跟蹤包括切入首航點、航線跟蹤、航線切換即轉彎飛行等階段。根據三個過程階段分別進行跟蹤算法設計,滿足航線飛行需求。
2.1.1 首航點飛行
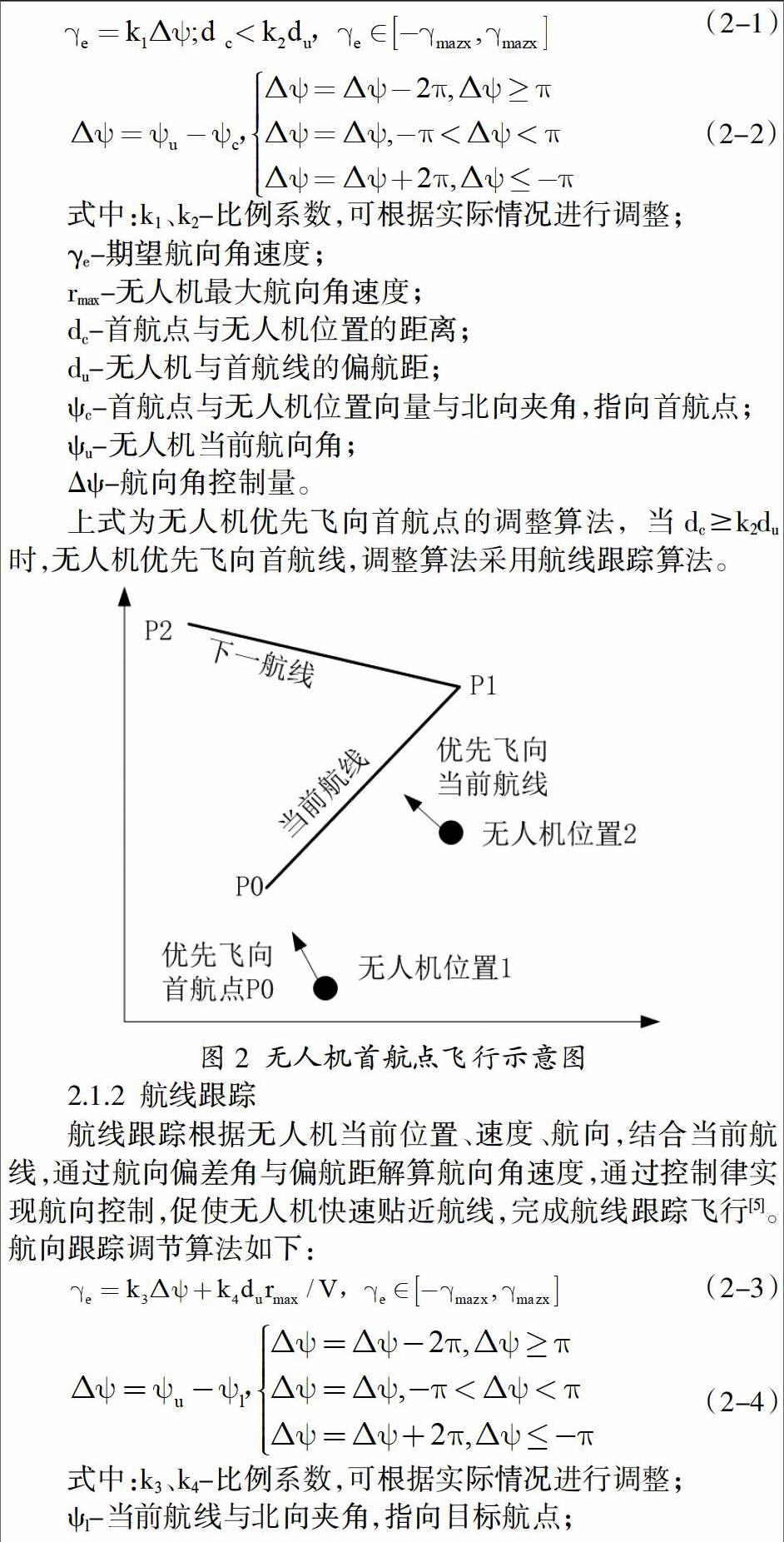
首航點飛行根據當前無人機位置,結合首行點位置、首航線特征,判斷無人機優先飛向首行點或首航線,首航點飛行調整算法如下:
上式為無人機優先飛向首航點的調整算法,當dc?叟k2du時,無人機優先飛向首航線,調整算法采用航線跟蹤算法。
2.1.2 航線跟蹤
航線跟蹤根據無人機當前位置、速度、航向,結合當前航線,通過航向偏差角與偏航距解算航向角速度,通過控制律實現航向控制,促使無人機快速貼近航線,完成航線跟蹤飛行[5]。航向跟蹤調節算法如下:
2.1.3 轉彎飛行
轉彎飛行主要是完成當前航線與目標航線的最優切換,通過計算最優轉彎距離、過點判斷進行無人機轉彎與進入目標航線的連續跟蹤。最優拐彎距離計算:
當無人機與目標航點的距離dc?燮dopt時,無人機進入轉彎飛行狀態。無人機采用半角判斷是否完成航線切換,如下圖所示,當無人機轉過航線夾角的角平分線時即完成轉彎,進入下一航線飛行。
2.2 定點盤旋
定點盤旋根據偵察任務需要對特定目標進行繞飛實現持續偵察或目標指示[6][7]。結合無人機最小轉彎半徑與導引頭視場,規劃外切多邊形實現近圓盤旋飛行,可以直接復用航線飛行的跟蹤算法完成定點盤旋飛行。在設計多邊形航線時應確保多邊形最大內切圓半徑大于無人機的最小轉彎半徑,并且在導引頭視場范圍之內。
式中:Rn-多邊形最大內切圓半徑;R-無人機的最小轉彎半徑;Rs-導引頭視場半徑;V-無人機速度;?準-無人機轉彎最大傾斜角;g-重力加速度。
2.3 指點飛行與返航
無人機指點飛行(返航)是根據當前無人機位置與指定點(返航點)進行直線規劃,實現無人機按照最短距離完成目標點飛行。此時無人機僅實時調整航向,保證無人機準確飛向指定點(返航點)。無人機指點飛行與返航時采用式2-1與式2-2進行航向調整。
3 仿真試驗結果
通過對小型無人機航跡跟蹤算法設計,利用Matlab進行仿真分析,驗證航跡跟蹤算法的可行性。在仿真分析中,式(2-1)中比例系數k1=-0.85,k2=3,最大角速度rmax=15°/s,式(2-3)中比例系數k3=-1.25,k4=-1,式(2-3)中比例系數K5=1,無人機速度V=30m/s。
4 結束語
本文研究了一種小型無人機的航跡跟蹤算法,通過Matlab仿真試驗驗證,具有較好的航跡跟蹤性能。針對定點盤旋提出多邊形航線規劃,滿足目標持續監視效果,進一步優化航跡跟蹤算法設計。此航跡跟蹤算法立足平面化,未考慮無人機高度變化,在后續的研究中引入相對飛行高度,完善航跡跟蹤算法設計。
參考文獻:
[1]陳錦霞.一種無人機的航跡規劃和自主導航算法[J].科技風,2012,22:24.
[2]屈薔,梅勁松,袁家斌.小型無人機GPS自主導航算法的研究與實現[J].大眾科技,2006,3:47-48.
[3]蔣志華,陶德桂,小型無人機航路規劃及自主導航算法研究[J].現代電子技術,2015,38(4):5-7.
[4]韓泉泉,陳知秋,田雪濤,等.無人機航線跟隨控制方案設計與實現[J].電子設計工程,2014,22(11):1-4.
[5]李洪烈,周洪霞,薛先俊.基于航跡點控制的無人機目標跟蹤算法[J].信息技術,2013,3:113-116.
[6]王洋,劉偉.盤旋跟蹤地面目標小型無人機控制系統設計[J].北京航空航天大學學報,2010,36(10):1252-1255.
[7]祝小平.無人機設計手冊[M].北京:國防工業出版社,2007.endprint