變胞機器人
2017-09-08 14:23:30張春松唐昭
物聯(lián)網(wǎng)技術(shù) 2017年8期
關(guān)鍵詞:動作
張春松+唐昭

摘 要:文中利用變胞機構(gòu)的變結(jié)構(gòu)特點開發(fā)出了一款變胞機器人,大大提高了爬行機器人的行走穩(wěn)定裕度、避障能力、攀爬能力、拐彎能力即對復(fù)雜環(huán)境的適應(yīng)能力等。具有良好的社會效益與經(jīng)濟效益。
關(guān)鍵詞:四足變胞機器人;虎克鉸
1 四足變胞機器人簡介
本作品將一種空間六桿變胞機構(gòu)運用到爬行機器人的腰部設(shè)計中。利用變胞機構(gòu)變結(jié)構(gòu)特點開發(fā)出四足變胞機器人。四足變胞機器人的顯著特點在于能夠隨意變形,且其爬行性能也得到了明顯提高。
四足變胞機器人具有平面和空間兩種構(gòu)態(tài)。在平面構(gòu)態(tài)下,四足變胞爬行機器人可以靈活變換腰部形態(tài),如圖1所示,進而改變四條腿的相對布置方式,以改變其行走方式,靈活適應(yīng)各種窄道、彎道和障礙物。在空間構(gòu)態(tài)下,四足變胞機器人可以輕松實現(xiàn)腰部的拱仰,如圖2所示,進而適應(yīng)凹凸不平的地面及上下坡等環(huán)境條件。可見變胞機構(gòu)的引入,使得爬行機器人能夠適用于所有路面環(huán)境。這是輪式,履帶式機器人所不具備的。
變胞機構(gòu)的應(yīng)用提高了爬行機器人諸多性能指標(biāo),如行走穩(wěn)定裕度、避障能力、攀爬能力、拐彎能力、步態(tài)協(xié)調(diào)性等,有助于提高爬行機器人的靈活性和對復(fù)雜環(huán)境的適應(yīng)能力。
2 工作原理
文中主要講述用于四足變胞機器人腰部的變胞六桿機構(gòu)的特征,以此闡明變胞仿生機器人的技術(shù)細節(jié)和工作原理。
2.1 技術(shù)細節(jié)
通過分析圖3所示的自然界中爬行動物腰部脊椎骨骼結(jié)構(gòu),我們發(fā)現(xiàn)其結(jié)構(gòu)對應(yīng)于機構(gòu)運動副中的虎克鉸。同時考慮到各種動物腿的相對位置關(guān)系,提出了可變腰的概念。由此我們創(chuàng)造性的將平面六桿機構(gòu)中的兩個轉(zhuǎn)動副換成了虎克鉸,得到一種具有多種構(gòu)態(tài)的空間六桿變胞機構(gòu),如圖4所示。
上述空間六桿變胞機構(gòu)具有多種構(gòu)態(tài),每種構(gòu)態(tài)下機構(gòu)拓撲結(jié)構(gòu)以及自由度均不相同。由上圖可以看出,前三條腰桿由軸線相互平行的兩個轉(zhuǎn)動副連接,因此前三條腰桿始終共面(前半腰平面)。同理,后三條腰桿也始終共面(后半腰平面)。左右兩個虎克鉸水平方向的轉(zhuǎn)動軸線都在這兩個平面上。根據(jù)這兩條交線是否共線可以得到兩種不同的構(gòu)態(tài),即平面構(gòu)態(tài)和空間構(gòu)態(tài)。
平面構(gòu)態(tài):當(dāng)兩個虎克鉸水平方向軸線不共線時,根據(jù)幾何學(xué)基本定理——兩相交平面有且僅有一條交線可知,此時前后兩個半腰平面重合,故兩虎克鉸中的水平方向軸線不能轉(zhuǎn)動,被鎖死。此時,該機構(gòu)等價于一個三自由度的平面六桿機構(gòu),如圖5(a)所示。
空間構(gòu)態(tài):當(dāng)兩個虎克鉸水平方向的軸線共線時,前后兩半腰平面可以繞該共線的軸線相對旋轉(zhuǎn),此時前后兩個半腰平面不再重合,且只要前后半腰平面不共面,兩虎克鉸水平軸線就必共線。所以在該構(gòu)態(tài)下,后半腰(深色)的兩個轉(zhuǎn)動副不能旋轉(zhuǎn)(因為一旦旋轉(zhuǎn)兩虎克鉸的水平軸線將不再共線),被鎖死在90°的位置。這時機構(gòu)等價于一個兩自由度的空間四桿機構(gòu),如圖5(b)所示。
兩種構(gòu)態(tài)的過渡是前后半腰平面共面且左右兩虎克較的水平方向軸線共線,在過渡狀態(tài),該機構(gòu)即可自由進入以上兩種構(gòu)態(tài)的任何一種。在平面構(gòu)態(tài)中還有一種特殊情況,即在空間構(gòu)態(tài)下,當(dāng)前半腰平面繞虎克鉸水平軸線(左右兩虎克鉸在空間構(gòu)態(tài)下水平方向軸線共線)旋轉(zhuǎn)180°后,前后半腰平面又共面,此時機構(gòu)也是兩種構(gòu)態(tài)的過渡構(gòu)態(tài),如圖6所示。特別是當(dāng)前腰桿2和后腰桿2重合時,機構(gòu)變成了一個兩自由度的串聯(lián)機構(gòu),如圖7所示。
通過將上述空間六桿變胞機構(gòu)作為爬行動物腰部結(jié)構(gòu),并在空間六桿變胞機構(gòu)中四條較長的桿中點處對稱布置四條腿即可得到變胞爬行機器人,如圖8所示。
2.2 變胞機構(gòu)改善爬行機器人性能的技術(shù)原理
變胞爬行機器人將變胞機構(gòu)應(yīng)用到多足爬行機器人的腰部,能夠在運動過程中改變機構(gòu)構(gòu)態(tài)和自由度,實現(xiàn)了機構(gòu)構(gòu)型的改變。變胞機構(gòu)使得多足爬行機器人腰部可變形,可以更好地模仿自然界爬行動物的脊椎腰部結(jié)構(gòu),調(diào)節(jié)姿態(tài),增強運動靈活性。提高四足多足爬行機器人的靈活性和對不同地形環(huán)境的適應(yīng)能力可擴大其使用范圍。
(1)變胞爬行機器人的腰部可變形,可做運動和適應(yīng)性調(diào)節(jié)。在遇到較窄彎道時,可使腰部扭轉(zhuǎn)一個角度,順利通過該彎道,而如果是剛性腰的爬行機器人則無法做到這一點,如圖9所示。
(2)通過腰部機構(gòu)變形,可以調(diào)節(jié)腰部的重心,使得腰部的重心始終處在穩(wěn)定域中的最佳位置,如圖10所示。可使變胞爬行機器人運行更加穩(wěn)定。
(3)變胞爬行機器人可實現(xiàn)弓腰,仰腰,扭腰的動作,如圖11所示。這些動作對爬行機器人運動適應(yīng)性的調(diào)節(jié)大有裨益。這一點這是剛性腰機器人無法做到的。
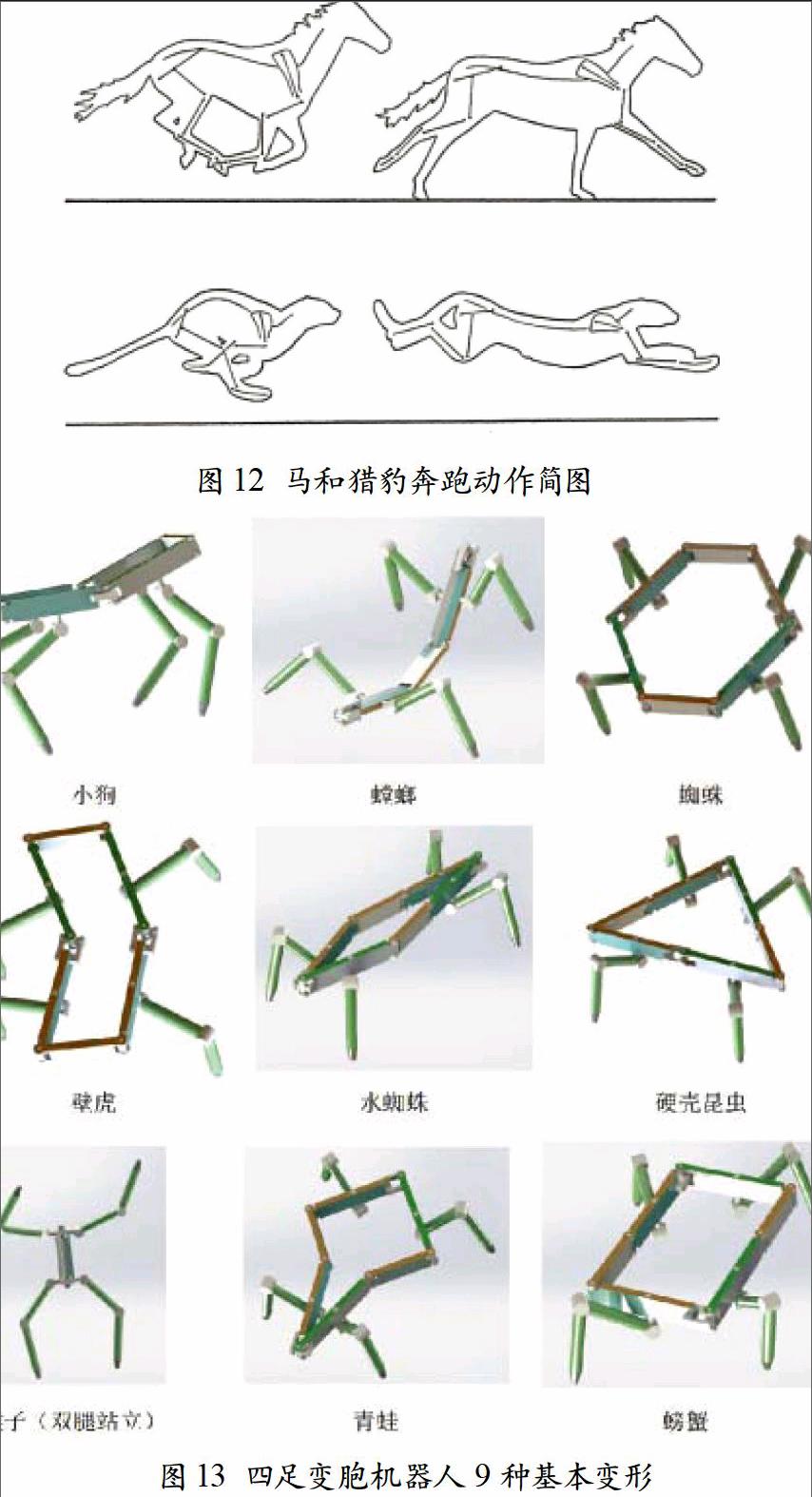
(4)通過腰部關(guān)節(jié)的運動可以在奔跑過程中起到緩沖和減震的作用,同時具有一定柔性的腰部可以大大提高機器人的奔跑速度,可通過馬和獵豹的奔跑姿態(tài)和速度得到證實,如圖12所示。
(5)通過腰的變化,爬行機器人不僅能改變各條腿之間的相對位置,還可改變腰部本身的形態(tài)和剛度,并綜合以上兩種變化,組合出多類動物形態(tài),實現(xiàn)對多種動物形態(tài)的仿生,集各類動物的特點于一身,如爬行動物的靈活性,昆蟲類動物的穩(wěn)定性,哺乳動物的速度,節(jié)肢動物手腳共用等。圖13所示是變胞機器人模仿上述四種動物形態(tài)的示意圖。
2.3 四足變胞機器人的控制方法
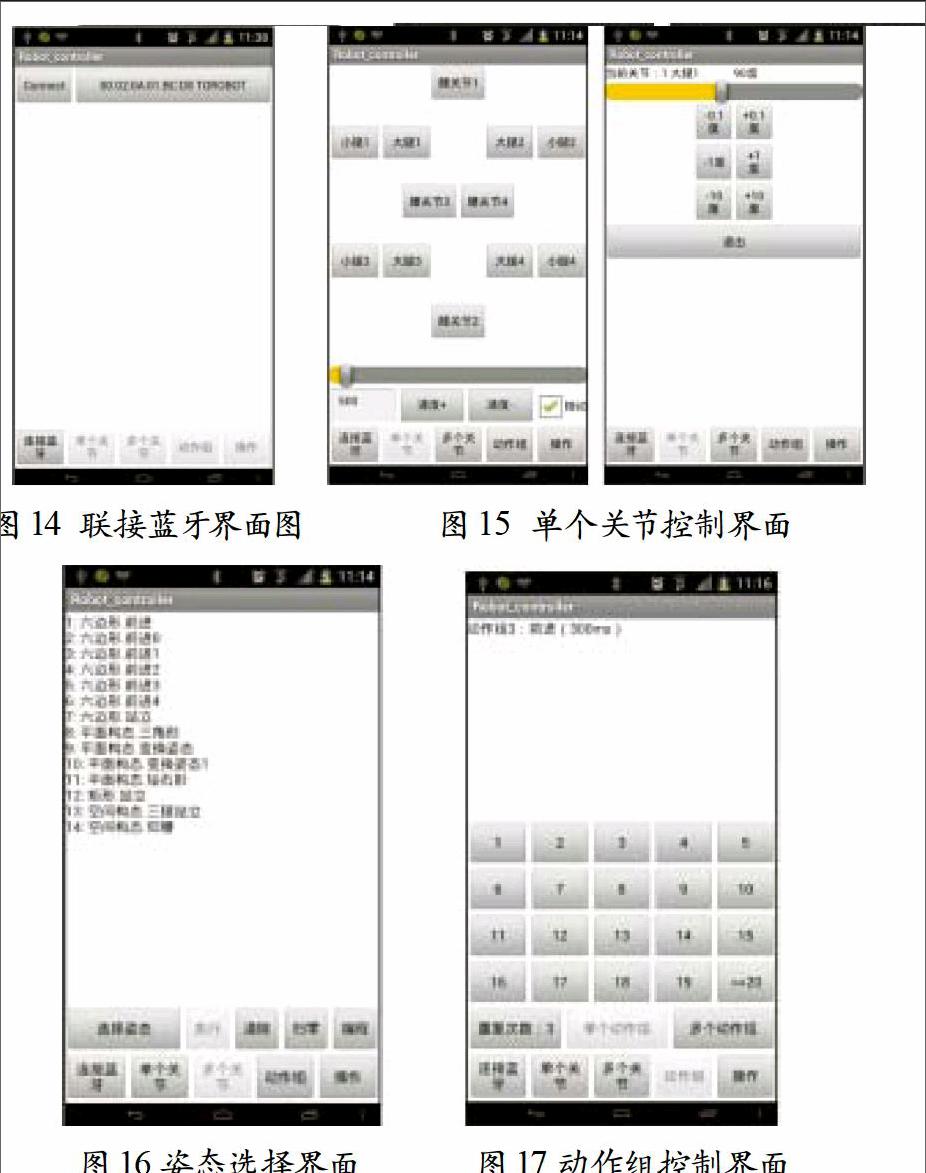
四足變胞機器人采用手機App控制方式。配備專用手機App,通過藍牙傳送控制數(shù)據(jù)。先進入選擇藍牙界面,該界面如圖14所示,選擇機器人的藍牙ID號點擊“Connect”使手機與機器人取得通信;然后選擇不同的控制模式,即單個關(guān)節(jié)控制模式、姿態(tài)選擇模式、動作組控制模式,分別如圖15、16、17所示。
單關(guān)節(jié)控制模式和姿態(tài)選擇模式相互配合使用。在單關(guān)節(jié)控制模式下,用戶可以有針對性地調(diào)節(jié)機器人每個關(guān)節(jié)轉(zhuǎn)動角度,方便用戶設(shè)計機器人的姿態(tài)。用戶把設(shè)定好的姿態(tài)保存并命名后,便可在姿態(tài)選擇界面選擇其設(shè)計的機器人姿態(tài),機器人將運動到用戶設(shè)定的姿態(tài)。設(shè)定的姿態(tài)可以按用戶意愿排序,在姿態(tài)選擇界面可以讓機器人按照順序依次變換,在某種程度上實現(xiàn)了機器人跳舞的效果。
動作組控制模式又分為單個動作組和多個動作組模式。在單個動作組模式下,用戶按動一個按鈕,機器人便執(zhí)行一套動作。實現(xiàn)動作的程序已預(yù)先打包并存于機器人控制系統(tǒng)中,一個按鈕對應(yīng)一套動作。在多個動作組模式下,用戶可以預(yù)先按多個按鈕,然后按“執(zhí)行”按鈕,機器人將連貫執(zhí)行用戶選擇的多套動作。同時用戶還可以設(shè)置單個動作組和多個動作組的重復(fù)次數(shù),使機器人重復(fù)單個動作組或多個動作組。
3 創(chuàng)新點
變胞機構(gòu)于1998年首次提出,經(jīng)歷了18年的發(fā)展,目前仍屬于國際機構(gòu)學(xué)與機器人學(xué)的前沿。通過變胞機構(gòu)在運動過程中改變機構(gòu)構(gòu)態(tài)和自由度,實現(xiàn)腰部構(gòu)型的改變。從而更好地模仿各類動物的腰部結(jié)構(gòu),實現(xiàn)對多類動物仿生,集多類動物優(yōu)點于一身,包括哺乳類動物的速度、爬行類動物的靈活性以及昆蟲類動物的穩(wěn)定性,進而提高多足仿生機器人的靈活性和對不同地形環(huán)境的適應(yīng)能力。四足變胞仿生機器人有如下創(chuàng)新點:
(1)首次成功地將變胞機構(gòu)應(yīng)用到多足仿生機器人中;
(2)首次對機器人結(jié)構(gòu)實現(xiàn)了變構(gòu)型,變形態(tài),即實現(xiàn)了真正意義上的變形金剛;
(3)實現(xiàn)對多類動物仿生,集多類動物優(yōu)點于一身。
4 市場前景
變胞機構(gòu)憑借其變結(jié)構(gòu)和變自由度的特點,能提高機器人的環(huán)境適應(yīng)能力,甚至實現(xiàn)“一機多能”,將在機器人領(lǐng)域得到廣泛應(yīng)用,發(fā)揮巨大價值。變胞機構(gòu)的應(yīng)用將為機器人行業(yè)帶來巨大變革,未來的機器人將不再全是結(jié)構(gòu)化的、固定形態(tài)、固定功能的機器人。
四足變胞爬行機器人作為首款成功運用變胞機構(gòu)的機器人,其“變形金剛”般的能力必將受到大眾歡迎,在教育娛樂機器人領(lǐng)域擁有巨大的市場前景。endprint
猜你喜歡
作文周刊·小學(xué)一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學(xué)一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27