基于圖像識(shí)別的鉆頭自動(dòng)跟蹤算法
2017-09-08 06:11:02楊懷林
現(xiàn)代電子技術(shù) 2017年17期
關(guān)鍵詞:卡爾曼濾波
楊懷林


摘 要: 針對(duì)當(dāng)前方法進(jìn)行鉆頭自動(dòng)跟蹤過程中,難以對(duì)鉆頭目標(biāo)模板進(jìn)行精確描述且運(yùn)算較為復(fù)雜,存在跟蹤誤差大的問題,提出一種基于圖像識(shí)別鉆頭自動(dòng)跟蹤方法。該方法利用雙重卷積理論對(duì)鉆頭原圖像進(jìn)行閾值分割,提取鉆頭運(yùn)動(dòng)圖像目標(biāo),將提取的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行濾波處理,獲得鉆頭圖像的歸一化中心矩,采用高斯模型對(duì)鉆頭運(yùn)動(dòng)圖像目標(biāo)和背景建模,在此基礎(chǔ)上將卡爾曼濾波預(yù)測(cè)估計(jì)思想和均值漂移思想相融合,應(yīng)用于鉆頭運(yùn)動(dòng)圖像目標(biāo)跟蹤過程中,由此完成對(duì)鉆頭的自動(dòng)跟蹤。實(shí)驗(yàn)結(jié)果表明,所提方法能夠有效提升鉆頭運(yùn)動(dòng)圖像目標(biāo)的檢測(cè)精度,且目標(biāo)跟蹤的穩(wěn)定性較強(qiáng)。
關(guān)鍵詞: 圖像識(shí)別; 鉆頭; 自動(dòng)跟蹤; 卡爾曼濾波
中圖分類號(hào): TN911.73?34; TP391 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2017)17?0056?04
Drill automatic tracking algorithm based on image recognition
YANG Huailin1, 2
(1. Nanjing Normal University, Nanjing 210097, China; 2. Jiangsu Vocational College of Finance and Economics, Huaian 221008, China)
Abstract: The current methods are difficult to describe the drill target template accurately and have complex operation and big tracking error in the drill automatic tracking process, therefore a drill automatic tracking method based on image recognition is proposed. The double convolution theory is used to segment the threshold of the drill original image to extract the drill moving image target. The extracted drill moving image target is filtered to get the normalized central moment of the drill image. The Gauss model is used to model the drill moving image target and background. On this basis, the thoughts of Kalman filtering estimation and mean shift are integrated to apply to the tracking process of drill moving image target, so as to track the drill automatically. The experimental results show that the method can improve the detection accuracy of drill moving image target effectively, and has high stability of target tracking.
Keywords: image recognition; drill; automatic tracking; Kalman filtering
0 引 言
近年來,隨著我國(guó)科學(xué)技術(shù)的不斷進(jìn)步,計(jì)算機(jī)視覺技術(shù)和圖像并行處理技術(shù)得到了飛速發(fā)展,自動(dòng)跟蹤技術(shù)逐漸成為計(jì)算機(jī)視覺、自動(dòng)控制和模式識(shí)別領(lǐng)域的研究熱點(diǎn)問題[1?3]。隨著機(jī)械設(shè)備高度自動(dòng)化、集成化以及無(wú)人化的發(fā)展,基于圖像的目標(biāo)識(shí)別與跟蹤技術(shù)在機(jī)械設(shè)備領(lǐng)域受到了廣泛的應(yīng)用[4?6],鉆頭是機(jī)械加工領(lǐng)域中孔加工最主要的加工工具,在研究和開發(fā)機(jī)械設(shè)備自動(dòng)加工過程中,鉆頭的識(shí)別與自動(dòng)跟蹤技術(shù)對(duì)實(shí)現(xiàn)加工過程自動(dòng)化、提升制造業(yè)水平具有重要意義[7?8]。在實(shí)際加工過程中,鉆頭磨損、斷裂等問題使鉆頭成為制造系統(tǒng)中最薄弱的一環(huán),易造成機(jī)械設(shè)備生產(chǎn)效率低,嚴(yán)重時(shí)還會(huì)造成設(shè)備停機(jī)事故。在這種情況下,如何對(duì)鉆頭進(jìn)行自動(dòng)跟蹤,實(shí)現(xiàn)加工過程自動(dòng)化、提升制造業(yè)水平現(xiàn)已成為制造裝備自動(dòng)化領(lǐng)域亟待解決的首要任務(wù),受到了眾多專家學(xué)者的廣泛關(guān)注[9?11]。
針對(duì)當(dāng)前方法進(jìn)行鉆頭的自動(dòng)跟蹤時(shí),對(duì)目標(biāo)模板的描述不精確且運(yùn)算復(fù)雜,存在跟蹤誤差大的問題,提出一種基于圖像識(shí)別的鉆頭自動(dòng)跟蹤方法。實(shí)驗(yàn)結(jié)果表明,所提方法在進(jìn)行鉆頭的自動(dòng)跟蹤時(shí)對(duì)運(yùn)動(dòng)目標(biāo)檢測(cè)精度高且運(yùn)算簡(jiǎn)單,大幅度提升了目標(biāo)跟蹤的穩(wěn)定性。
1 基于圖像識(shí)別的鉆頭自動(dòng)跟蹤算法
1.1 圖像識(shí)別的特征提取
在對(duì)圖像識(shí)別鉆頭自動(dòng)跟蹤過程中,先結(jié)合雙重卷積理論對(duì)鉆頭的原圖像進(jìn)行閾值分割,提取鉆頭運(yùn)動(dòng)圖像目標(biāo),再對(duì)輸入的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行Gabor小波變換,得出每個(gè)通道輸出的鉆頭運(yùn)動(dòng)圖像,對(duì)提取的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行濾波處理,獲得鉆頭運(yùn)動(dòng)圖像目標(biāo)的歸一化中心矩,結(jié)合支持向量機(jī)理論對(duì)鉆頭運(yùn)動(dòng)圖像進(jìn)行像素分類,獲取候選鉆頭運(yùn)動(dòng)圖像目標(biāo),采用高斯模型對(duì)鉆頭運(yùn)動(dòng)圖像目標(biāo)和背景建模。具體過程如下所述:
采用雙重卷積理論對(duì)原鉆頭圖像進(jìn)行閾值分割,提取出鉆頭運(yùn)動(dòng)圖像目標(biāo),在此基礎(chǔ)上,對(duì)輸入的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行Gabor小波變換,利用式(1)進(jìn)行計(jì)算:endprint
(1)
式中:表示鉆頭運(yùn)動(dòng)圖像目標(biāo);表示Gabor小波濾波器組;表示鉆頭運(yùn)動(dòng)圖像目標(biāo)經(jīng)過Gabor濾波器卷積處理后得到的一組濾波結(jié)果。
利用式(2)對(duì)鉆頭運(yùn)動(dòng)圖像的階中心矩進(jìn)行定義:
(2) 式中表示鉆頭運(yùn)動(dòng)圖像的中心坐標(biāo)。
定義以下4個(gè)對(duì)平移、旋轉(zhuǎn)和尺度變換不變的矩:
式中:表示鉆頭運(yùn)動(dòng)圖像的歸一化中心矩;采用支持向量機(jī)的分類方法對(duì)鉆頭運(yùn)動(dòng)圖像的歸一化中心矩進(jìn)行回歸分析。定義在某一時(shí)刻鉆頭運(yùn)動(dòng)圖像中任一像素的像素概率模型為:
(3)
式中:表示在時(shí)刻鉆頭運(yùn)動(dòng)圖像的像素屬于前景或背景的概率。利用式(4)定義時(shí)刻鉆頭運(yùn)動(dòng)圖像中像素的背景混合模型為:
(4)
式中:表示在時(shí)刻鉆頭運(yùn)動(dòng)圖像中像素的像素值;表示該混合模型中描述鉆頭運(yùn)動(dòng)圖像像素色彩特性的高斯分布模型的個(gè)數(shù);表示時(shí)刻鉆頭運(yùn)動(dòng)圖像背景混合模型中(表示第個(gè))子模型的權(quán),所有子模型的權(quán)之和等于1,即;和分別表示時(shí)刻鉆頭運(yùn)動(dòng)圖像背景混合模型中子模型的均值和協(xié)方差矩陣。
以權(quán)和標(biāo)準(zhǔn)差之比作為適應(yīng)度值,從鉆頭運(yùn)動(dòng)圖像的背景混合模型中找到具有最大適應(yīng)度值的子模型作為鉆頭運(yùn)動(dòng)圖像的當(dāng)前幀背景分布模型,利用式(5)進(jìn)行計(jì)算,可得到時(shí)刻鉆頭運(yùn)動(dòng)圖像的像素屬于背景的條件概率:
(5)
式中:表示鉆頭運(yùn)動(dòng)圖像像素的特征向量;表示特征向量的維數(shù);分別表示該條件概率的均值和協(xié)方差矩陣。
通過多次迭代即可提取出鉆頭運(yùn)動(dòng)圖像的背景,具體過程如下所述:
(1) 設(shè)置最大迭代次數(shù)以及每次迭代中被修正的鉆頭運(yùn)動(dòng)圖像的最少像素?cái)?shù)
(2) 針對(duì)鉆頭運(yùn)動(dòng)圖像中每一像素,從背景和前景混合模型中找到具有最大適應(yīng)度值的子模型作為鉆頭運(yùn)動(dòng)圖像當(dāng)前幀背景和前景的分布模型。
(3) 利用式(5)計(jì)算鉆頭運(yùn)動(dòng)圖像的像素8鄰域中屬于背景的像素?cái)?shù)。
(4) 以獲得的鉆頭運(yùn)動(dòng)圖像的像素先驗(yàn)概率為依據(jù),對(duì)像素進(jìn)行判斷:
式中:代表鉆頭運(yùn)動(dòng)圖像像素的先驗(yàn)分布密度函數(shù);代表鉆頭運(yùn)動(dòng)圖像像素的先驗(yàn)分布密度函數(shù),若則像素被分類為背景,否則為前景。
(5) 若迭代次數(shù)大于或一次迭代中被修正鉆頭運(yùn)動(dòng)圖像的像素?cái)?shù)小于迭代分類結(jié)束,否則返回第(2)步。
在獲得運(yùn)動(dòng)圖像背景后,將鉆頭運(yùn)動(dòng)圖像當(dāng)前幀與鉆頭運(yùn)動(dòng)圖像背景相減,獲取候選鉆頭運(yùn)動(dòng)圖像目標(biāo),可表示為:
(6)
式中:表示歸一化因子;表示鉆頭運(yùn)動(dòng)圖像目標(biāo)特征值;和函數(shù)的作用是判斷鉆頭運(yùn)動(dòng)圖像目標(biāo)區(qū)域中像素的特征值是否屬于表示搜索窗口的鉆頭運(yùn)動(dòng)圖像中心像素坐標(biāo);表示核函數(shù)的帶寬,它決定候選目標(biāo)的尺度。利用式(6)給出的獲取候選鉆頭運(yùn)動(dòng)圖像目標(biāo)組建鉆頭的運(yùn)動(dòng)圖像背景模型,為建立鉆頭的運(yùn)動(dòng)目標(biāo)模型提供依據(jù)。
1.2 運(yùn)動(dòng)圖像目標(biāo)檢測(cè)
在對(duì)圖像識(shí)別鉆頭自動(dòng)跟蹤過程中,在1.1節(jié)得到的候選鉆頭運(yùn)動(dòng)圖像目標(biāo)的基礎(chǔ)上,以圖像的灰度信息為特征空間,結(jié)合單變量高斯模型將已獲得的鉆頭運(yùn)動(dòng)圖像目標(biāo)和背景信息進(jìn)行統(tǒng)計(jì),得到鉆頭運(yùn)動(dòng)圖像背景的高斯分布參數(shù)模型,對(duì)鉆頭運(yùn)動(dòng)圖像幀之間的特征點(diǎn)進(jìn)行相應(yīng)的匹配,采用卡爾曼濾波來預(yù)測(cè)鉆頭運(yùn)動(dòng)圖像的目標(biāo)位置,最終獲得鉆頭運(yùn)動(dòng)圖像跟蹤目標(biāo)的軌跡。具體過程如下所述:
假設(shè)鉆頭運(yùn)動(dòng)圖像幀的各個(gè)圖像灰度值均遵從均值和方差的分布,且各個(gè)鉆頭運(yùn)動(dòng)圖像像素點(diǎn)的高斯分布為單變量。在該模型中,代表單變量正態(tài)分布;代表鉆頭圖像灰度值的期望值;代表鉆頭運(yùn)動(dòng)圖像灰度值分布的方差。式(7)為鉆頭圖像幀的各個(gè)像素點(diǎn)組建正態(tài)分布的目標(biāo)和背景的概率模型:
(7)
式中代表鉆頭運(yùn)動(dòng)圖像的灰度信息特征值。
在第幀中,鉆頭運(yùn)動(dòng)圖像目標(biāo)(背景)模型中均值和方差的更新公式為:
均值:
方差:
在第幀中,鉆頭運(yùn)動(dòng)圖像目標(biāo)(背景)模型中的參數(shù)更新公式為:
均值:
方差:
式中:分別代表第幀鉆頭運(yùn)動(dòng)圖像中目標(biāo)(背景)點(diǎn)的統(tǒng)計(jì)均值和方差;代表判斷鉆頭運(yùn)動(dòng)圖像第幀中目標(biāo)(背景)樣本點(diǎn)所用高斯模型的均值和方差;代表鉆頭運(yùn)動(dòng)圖像目標(biāo)(背景)的樣本點(diǎn)數(shù);代表鉆頭圖像每個(gè)樣本點(diǎn)的灰度值;代表更新率。
在鉆頭運(yùn)動(dòng)圖像環(huán)境中,為了在以原目標(biāo)位置為中心的區(qū)域附近更快地找到鉆頭運(yùn)動(dòng)圖像目標(biāo),采用卡爾曼濾波來預(yù)測(cè)鉆頭運(yùn)動(dòng)圖像的目標(biāo)位置,將第一幀中的鉆頭運(yùn)動(dòng)圖像目標(biāo)中心位置和運(yùn)動(dòng)速度賦值給預(yù)測(cè)的鉆頭運(yùn)動(dòng)協(xié)方差可表示為:
(8)
式中:代表濾波器的結(jié)構(gòu)參數(shù);代表第幀圖像中的鉆頭運(yùn)動(dòng)圖像的目標(biāo)中心位置和運(yùn)動(dòng)速度的預(yù)測(cè)協(xié)方差。
結(jié)合式(8)預(yù)測(cè)鉆頭運(yùn)動(dòng)圖像的目標(biāo)位置,獲得真實(shí)中心位置跟蹤鉆頭運(yùn)動(dòng)圖像目標(biāo)的濾波方程為:
(9)
式中:代表第幀圖像中預(yù)測(cè)的觀測(cè)向量;代表濾波器的增益參數(shù)。
1.3 基于圖像識(shí)別鉆頭自動(dòng)跟蹤
在對(duì)鉆頭運(yùn)動(dòng)圖像自動(dòng)跟蹤過程中,以1.2節(jié)獲得的圖像運(yùn)動(dòng)目標(biāo)模型為基礎(chǔ),利用貝葉斯分類理論,在得到鉆頭運(yùn)動(dòng)圖像的后驗(yàn)條件概率的基礎(chǔ)上,對(duì)鉆頭運(yùn)動(dòng)圖像目標(biāo)的初始位置進(jìn)行識(shí)別;利用鉆頭運(yùn)動(dòng)圖像的灰度信息建立目標(biāo)模型,對(duì)第幀中的所有鉆頭運(yùn)動(dòng)圖像的樣本點(diǎn)進(jìn)行判別,得到鉆頭運(yùn)動(dòng)的置信圖利用均值漂移理論對(duì)置信圖峰值點(diǎn)進(jìn)行識(shí)別,求解鉆頭運(yùn)動(dòng)圖像的最優(yōu)峰值點(diǎn),實(shí)現(xiàn)多目標(biāo)分割、跟蹤。具體過程如下所述:
對(duì)鉆頭運(yùn)動(dòng)圖像的多目標(biāo)進(jìn)行分類,利用貝葉斯公式進(jìn)行計(jì)算,得到鉆頭運(yùn)動(dòng)圖像的后驗(yàn)條件概率,可表示為:
(10)
式中:代表鉆頭運(yùn)動(dòng)圖像目標(biāo)模型;代表鉆頭運(yùn)動(dòng)圖像背景模型。在此基礎(chǔ)上,結(jié)合式(10)對(duì)式(7)進(jìn)行轉(zhuǎn)化,給出鉆頭運(yùn)動(dòng)圖像目標(biāo)的初始位置,利用灰度信息建立目標(biāo)模型,對(duì)第幀鉆頭運(yùn)動(dòng)圖像的每一個(gè)樣本點(diǎn)做后驗(yàn)條件概率判斷,可以得到鉆頭運(yùn)動(dòng)的置信圖:endprint
(11)
結(jié)合均值漂移理論尋找鉆頭運(yùn)動(dòng)置信圖的峰值點(diǎn),計(jì)算結(jié)果可表示為:
(12)
式中:代表以鉆頭運(yùn)動(dòng)置信圖的峰值點(diǎn)為中心的鄰域;初始值代表卡爾曼濾波器濾波得到的預(yù)測(cè)值;分別代表鉆頭運(yùn)動(dòng)置信圖中每點(diǎn)的坐標(biāo)。
通過均值漂移算法得到鉆頭運(yùn)動(dòng)置信圖的峰值后,以上一幀的鉆頭運(yùn)動(dòng)圖像窗口大小為初始值,框定運(yùn)動(dòng)圖像目標(biāo)最優(yōu)點(diǎn),利用式(13)定義全部圖像識(shí)別的鉆頭自動(dòng)跟蹤目標(biāo)函數(shù):
(13)
式中代表上一幀的鉆頭運(yùn)動(dòng)圖像窗口大小,依據(jù)上一幀的窗口大小完成鉆頭運(yùn)動(dòng)圖像的自動(dòng)跟蹤。
2 實(shí)驗(yàn)仿真證明
為了驗(yàn)證本文提出的基于圖像識(shí)別鉆頭自動(dòng)跟蹤算法的有效性,需要進(jìn)行一次仿真實(shí)驗(yàn),實(shí)驗(yàn)圖像均為由CCD攝像機(jī)實(shí)時(shí)采集的可見光圖像,采樣速率為30 f/s,把RGB圖像轉(zhuǎn)換為灰度圖像,直方圖采用灰度級(jí)。編程環(huán)境是P42.4G的PC機(jī),算法由VC語(yǔ)言在Windows NT平臺(tái)下編程實(shí)現(xiàn),在不同鉆頭工作條件下進(jìn)行30次運(yùn)動(dòng)圖像自動(dòng)跟蹤實(shí)驗(yàn)。
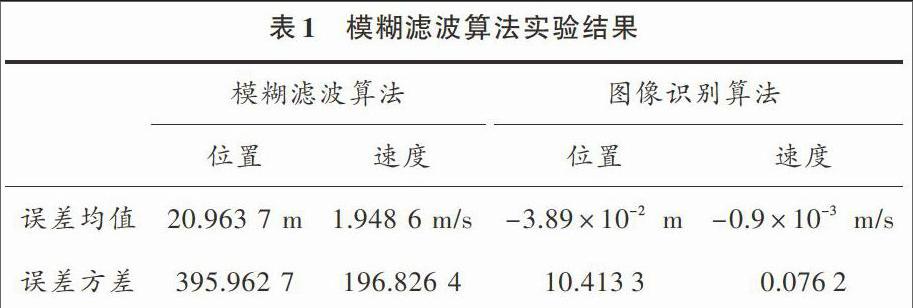
分別利用模糊濾波算法與圖像識(shí)別算法進(jìn)行鉆頭自動(dòng)跟蹤實(shí)驗(yàn),對(duì)比不同算法的跟蹤誤差,結(jié)果如表1所示。
通過分析表1可知,利用圖像識(shí)別算法進(jìn)行鉆頭自動(dòng)跟蹤的準(zhǔn)確性要高于利用模糊濾波算法進(jìn)行鉆頭跟蹤的結(jié)果,這主要是因?yàn)樵诶脠D像識(shí)別算法進(jìn)行鉆頭自動(dòng)跟蹤過程中,將鉆頭圖像與對(duì)應(yīng)每個(gè)通道的Gabor濾波器分別進(jìn)行卷積,得出每個(gè)通道輸出的鉆頭運(yùn)動(dòng)圖像,再對(duì)提取出的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行濾波,將鉆頭運(yùn)動(dòng)圖像的像素分為前景或背景,通過一定的加權(quán)將每一幀新輸入鉆頭運(yùn)動(dòng)圖像的變化動(dòng)態(tài)加到模型中自適應(yīng)地進(jìn)行更新。對(duì)鉆頭運(yùn)動(dòng)圖像幀之間的特征點(diǎn)進(jìn)行相應(yīng)的匹配工作,獲取鉆頭運(yùn)動(dòng)圖像的最優(yōu)峰值點(diǎn),使得利用圖像識(shí)別算法進(jìn)行鉆頭自動(dòng)跟蹤的準(zhǔn)確性較高。
以表1給出的統(tǒng)計(jì)結(jié)果為理論依據(jù),將模糊濾波算法得到的位置與誤差曲線和圖像識(shí)別鉆頭自動(dòng)跟蹤算法得到的位置與誤差曲線進(jìn)行對(duì)比,結(jié)果如圖1~圖4所示。
分析圖1~圖4可知,在不同的跟蹤實(shí)驗(yàn)次數(shù)下,利用圖像識(shí)別算法預(yù)測(cè)位置趨勢(shì)曲線與期望位置趨勢(shì)曲線基本吻合,通過誤差位置曲線可以看出,利用圖像識(shí)別算法進(jìn)行鉆頭的位置跟蹤誤差幾乎為零,這主要是因?yàn)樵诶脠D像識(shí)別方法進(jìn)行鉆頭自動(dòng)跟蹤過程中,先采用雙重卷積理論對(duì)原鉆頭圖像進(jìn)行閾值分割,提取出鉆頭運(yùn)動(dòng)圖像目標(biāo),對(duì)提取出的鉆頭運(yùn)動(dòng)圖像目標(biāo)進(jìn)行濾波處理,獲得鉆頭目標(biāo)圖像的歸一化中心矩。結(jié)合支持向量機(jī)理論對(duì)鉆頭運(yùn)動(dòng)圖像進(jìn)行像素分類,獲取候選鉆頭運(yùn)動(dòng)圖像目標(biāo),采用高斯模型對(duì)目標(biāo)和背景建模。以鉆頭圖像的灰度信息為特征空間,結(jié)合單變量高斯模型對(duì)已獲得的目標(biāo)和背景信息進(jìn)行統(tǒng)計(jì),得到鉆頭運(yùn)動(dòng)圖像背景的高斯分布參數(shù)模型。利用貝葉斯分類理論對(duì)鉆頭圖像目標(biāo)的初始位置進(jìn)行識(shí)別,在此基礎(chǔ)上,結(jié)合卡爾曼濾波預(yù)測(cè)估計(jì)方法和均值漂移理論得到鉆頭自動(dòng)跟蹤目標(biāo)函數(shù),實(shí)現(xiàn)目標(biāo)跟蹤和定位功能。
3 結(jié) 語(yǔ)
針對(duì)當(dāng)前方法進(jìn)行鉆頭自動(dòng)跟蹤過程中,難以對(duì)鉆頭目標(biāo)模板進(jìn)行精確描述且運(yùn)算較為復(fù)雜,存在跟蹤誤差大的問題,提出一種基于圖像識(shí)別鉆頭自動(dòng)跟蹤方法。實(shí)驗(yàn)結(jié)果表明,所提方法能夠有效提升鉆頭運(yùn)動(dòng)圖像目標(biāo)的檢測(cè)精度,且目標(biāo)跟蹤的穩(wěn)定性較強(qiáng)。
參考文獻(xiàn)
[1] 周楨.基于多標(biāo)記圖分割的遮擋下多目標(biāo)分割及跟蹤算法[J].科學(xué)技術(shù)與工程,2015,15(10):102?105.
[2] 黃斌.基于自適應(yīng)觀測(cè)粒子濾波的運(yùn)動(dòng)跟蹤算法[J].科技通報(bào),2016,32(3):145?148.
[3] 來羽.基于粒子群算法的傳感網(wǎng)絡(luò)節(jié)點(diǎn)動(dòng)態(tài)目標(biāo)跟蹤[J].計(jì)算機(jī)仿真,2016,33(3):239?242.
[4] 鄭朝暉.基于NCC匹配的Camshift目標(biāo)跟蹤算法[J].四川理工學(xué)院學(xué)報(bào)(自然科學(xué)版),2015,28(4):37?40.
[5] 李榮,徐燕華.基于視覺信息的圖像特征提取算法研究[J].電子設(shè)計(jì)工程,2016,24(9):188?190.
[6] 楊凱,魏本征,任曉強(qiáng),等.基于深度圖像的人體運(yùn)動(dòng)姿態(tài)跟蹤和識(shí)別算法[J].數(shù)據(jù)采集與處理,2015,30(5):1043?1053.
[7] 鄒德永,孟祥雨,袁軍,等.基于模式識(shí)別的鉆頭選型新方法[J].石油鉆探技術(shù),2016,44(2):40?45.
[8] 周西峰,鄒浩,郭前崗.一種基于超聲檢測(cè)圖像的缺陷自動(dòng)識(shí)別算法[J].微型機(jī)與應(yīng)用,2015,34(9):54?56.
[9] 白靈.基于Hadoop平臺(tái)下SVM的圖像識(shí)別技術(shù)[J].現(xiàn)代電子技術(shù),2016,39(16):98?101.
[10] 劉國(guó)華.基于圖像處理的鉆頭測(cè)量系統(tǒng)[J].黑龍江大學(xué)工程學(xué)報(bào),2016,7(1):92?96.
[11] 王躍東,錢小燕,張?zhí)齑龋?基于聯(lián)合雙邊濾波的融合圖像跟蹤算法研究[J].航空計(jì)算技術(shù),2016,46(2):37?41.endprint
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36