基于數(shù)據(jù)挖掘的足球最優(yōu)射門角度分析
2017-09-08 12:56:53劉溢鑫
現(xiàn)代電子技術(shù) 2017年17期
關(guān)鍵詞:數(shù)據(jù)挖掘
劉溢鑫

摘 要: 為了提高足球射門的準(zhǔn)確度,提出數(shù)據(jù)挖掘的足球最優(yōu)射門角度分析算法。采用粒子群算法把球場(chǎng)規(guī)劃為一個(gè)虛擬的網(wǎng)格環(huán)境,對(duì)足球射門路徑點(diǎn)實(shí)時(shí)標(biāo)定和疊加特性進(jìn)行分析,根據(jù)球場(chǎng)環(huán)境中的信息素,粒子群算法實(shí)現(xiàn)進(jìn)球概率優(yōu)化求解,以路徑適應(yīng)度函數(shù)為優(yōu)化目標(biāo)函數(shù)進(jìn)行射門角度特征數(shù)據(jù)挖掘,求得路徑適應(yīng)度函數(shù)的最優(yōu)解即為最優(yōu)射門角度的解向量。仿真結(jié)果表明,該算法可以在復(fù)雜程度不同的球場(chǎng)環(huán)境中規(guī)劃出一條最優(yōu)進(jìn)球路徑,可以用于指導(dǎo)足球訓(xùn)練。
關(guān)鍵詞: 數(shù)據(jù)挖掘; 射門角度; 粒子進(jìn)化; 路徑適應(yīng)度函數(shù)
中圖分類號(hào): TN911.1?34; TP391.9 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2017)17?0124?03
Data mining based analysis algorithm of football optimal shooting angle
LIU Yixin
(Chengdu College, University of Electronic Science and Technology of China, Chengdu 611731, China)
Abstract: In order to improve the accuracy of football shooting, a data mining based football optimal shooting angle analysis algorithm is proposed. The particle swam algorithm is used to plan the football field as a virtual network environment, calibrate the path point of football shooting in real time, and analyze the superposition characteristics. According to pheromone in football field environment, the particle swam algorithm is adopted to perform optimization solution for the goal probability. The path fitness function is taken as the optimal target function to carry out data mining for shooting angle feature. The obtained optimal solution of path fitness function is deemed as the solution vector of optimal shooting angle. The simulation results show that the algorithm can plan an optimal goal path in football field environment with different complexities, and is applicable for the guidance of football training.
Keywords: data mining; shooting angle; particle evolution; path fitness function
0 引 言
足球是當(dāng)前世界上最為流行的運(yùn)動(dòng)項(xiàng)目之一,隨著各個(gè)國(guó)家對(duì)足球運(yùn)動(dòng)發(fā)展的重視,對(duì)足球運(yùn)動(dòng)的科學(xué)訓(xùn)練研究受到人們的重視。足球射門是贏得比賽的關(guān)鍵環(huán)節(jié),足球射門的技巧性較強(qiáng),需要對(duì)足球射門角度進(jìn)行最優(yōu)化求解,通過(guò)建立足球射門角度分析的數(shù)學(xué)模型,采用計(jì)算機(jī)仿真和數(shù)學(xué)建模方法進(jìn)行最優(yōu)射門角度分析,實(shí)現(xiàn)對(duì)足球射門訓(xùn)練的科學(xué)分析,提高進(jìn)球概率,結(jié)合射門路徑規(guī)劃進(jìn)行足球射門運(yùn)動(dòng)軌跡的路徑分析,能夠以合理的射門角度完成射球。
為了更好地完成足球射門訓(xùn)練,提出基于數(shù)據(jù)挖掘的足球最優(yōu)射門角度分析算法,采用數(shù)據(jù)挖掘分析方法進(jìn)行足球最優(yōu)射門角度模擬分析,包括球場(chǎng)網(wǎng)格環(huán)境的建立,適應(yīng)度函數(shù)構(gòu)建和路徑規(guī)劃,最后通過(guò)仿真實(shí)驗(yàn)進(jìn)行驗(yàn)證分析。
1 足球場(chǎng)運(yùn)動(dòng)軌跡虛擬網(wǎng)格環(huán)境設(shè)計(jì)
首先把球場(chǎng)規(guī)劃為一個(gè)虛擬的網(wǎng)格環(huán)境,根據(jù)復(fù)雜適應(yīng)系統(tǒng)理論[1]及粒子群進(jìn)化算法對(duì)足球射門的飛行路徑點(diǎn)進(jìn)行粒子編碼,通過(guò)粒子編碼釋放一種信息素進(jìn)行足球的射門角度和路徑引導(dǎo),設(shè)置初始位形,獲得目標(biāo)位置的地形,采用算法把球場(chǎng)規(guī)劃為一個(gè)虛擬的網(wǎng)格環(huán)境[2],構(gòu)建一個(gè)10×10的網(wǎng)格結(jié)構(gòu)模型表示足球運(yùn)動(dòng)場(chǎng)的虛擬網(wǎng)格結(jié)構(gòu),如圖1所示。
在圖1所示的足球運(yùn)動(dòng)場(chǎng)的虛擬網(wǎng)格結(jié)構(gòu)中進(jìn)行最優(yōu)射門角度的路徑解向量分析,構(gòu)建多叉樹(shù)混合網(wǎng)絡(luò),獲得抓取目標(biāo)解,在進(jìn)行足球最優(yōu)射門角度優(yōu)選過(guò)程中,設(shè)時(shí)刻粒子群的先驗(yàn)信息特征點(diǎn)分布為足球飛行軌跡中的目標(biāo)移動(dòng)點(diǎn)為,采用隨機(jī)采樣位形擴(kuò)展方法進(jìn)行足球射門的偏轉(zhuǎn)角和飛行弧度估計(jì),定義環(huán)境參數(shù)描述空間內(nèi)每點(diǎn)處的障礙信息,表示防守隊(duì)員的位置信息素特征量,第個(gè)防守隊(duì)員的位置為粒子的最優(yōu)位置,表示為,則足球射門的初始位形與目標(biāo)落地點(diǎn)的距離為:
(1)
2 粒子群算法的足球射門路徑參數(shù)標(biāo)定
采用粒子旋轉(zhuǎn)門策略進(jìn)行足球射門的路徑點(diǎn)實(shí)時(shí)標(biāo)定和疊加特性分析,根據(jù)足球射門后的飛行方向、距離、速度等向量,采用粒子算法[3]得到粒子個(gè)體的位置向量解表示為。0表示此地點(diǎn)信息素初始化時(shí)較小,每個(gè)粒子追隨當(dāng)前的種群達(dá)到最優(yōu)射門角度時(shí)信息素接近于1。根據(jù)球場(chǎng)環(huán)境中的信息素進(jìn)行粒子全局最優(yōu)位置尋優(yōu)[4],假設(shè)足球射門路徑點(diǎn)的最大迭代次數(shù)為當(dāng)前迭代代數(shù)為得到整個(gè)種群的全局最優(yōu)位置的慣性權(quán)重為:endprint
(2)
采用粒子計(jì)算方法得到目標(biāo)進(jìn)球位置點(diǎn)處粒子群個(gè)體在時(shí)刻的位置初始位形向量為足球落地點(diǎn)的位置更新迭代式為:
(3)
設(shè)置足球飛行過(guò)程中的旋轉(zhuǎn)軌跡隨機(jī)擴(kuò)展標(biāo)記位置更新公式如下:
(4)
式中:為種群走過(guò)的路徑;為慣性權(quán)重;為智能體當(dāng)前點(diǎn)的適應(yīng)度系數(shù);為鄰階選擇因子;和為旋轉(zhuǎn)粒子門的信息素。
根據(jù)球場(chǎng)環(huán)境中的信息素進(jìn)行粒子計(jì)算實(shí)現(xiàn)進(jìn)球概率優(yōu)化求解,在一次迭代完成后進(jìn)行最優(yōu)位置局部尋優(yōu),得到旋轉(zhuǎn)粒子門中出來(lái)的目標(biāo)點(diǎn)姿態(tài)信息度為:
(5)
式中:為運(yùn)動(dòng)中的足球在時(shí)刻運(yùn)動(dòng)方位的估計(jì)值,足球在時(shí)刻的姿態(tài)信息度得到足球射門路徑粒子群標(biāo)定的信息素為:
(6)
其中,足球射門路徑相交于點(diǎn)和點(diǎn)的方位置信度為:
(7)
根據(jù)貝葉斯定理[5],足球射門路徑的飛行路徑數(shù)據(jù)根據(jù)其過(guò)去的測(cè)量值得到,根據(jù)上述設(shè)計(jì),基于動(dòng)態(tài)橢圓曲線求解方法得到射門角度粒子挖掘的遞歸計(jì)算表達(dá)式為:
(8)
通過(guò)路徑向量的疊加特性分析[6]可知足球的當(dāng)前位姿及期望射門角度僅和相關(guān),即:
(9)
應(yīng)用粒子群算法求解足球有效射門的方位角,則有:
(10)
3 數(shù)據(jù)挖掘的足球最優(yōu)射門角度計(jì)算
基于最優(yōu)高斯隨機(jī)游走和個(gè)體篩選策略的差分進(jìn)化方法進(jìn)行數(shù)據(jù)挖掘[7?8],根據(jù)球場(chǎng)環(huán)境中的信息素進(jìn)行粒子計(jì)算,實(shí)現(xiàn)進(jìn)球概率優(yōu)化求解,進(jìn)球概率密度函數(shù)為:
(11)
根據(jù)粒子群體信息交換機(jī)制對(duì)足球射門的路徑點(diǎn)進(jìn)行粒子比特編碼,求出路徑適應(yīng)度解向量路徑點(diǎn)信息解滿足采用路徑方法對(duì)進(jìn)行調(diào)整加權(quán)得到足球最優(yōu)射門角度的特征參量數(shù)據(jù)挖掘的加權(quán)值為:
(12)
式中:為球場(chǎng)環(huán)境中信息素的選擇因子。
根據(jù)球場(chǎng)環(huán)境中的信息素進(jìn)行粒子計(jì)算,實(shí)現(xiàn)進(jìn)球概率優(yōu)化求解,得到最優(yōu)解為:
(13)
綜上分析,構(gòu)建足球射門的路徑適應(yīng)度函數(shù):
(14)
以此為優(yōu)化目標(biāo)函數(shù)進(jìn)行射門角度特征數(shù)據(jù)挖掘,最優(yōu)射門角度的解向量為:
(15)
當(dāng),此時(shí)通過(guò)上述分析,采用數(shù)據(jù)挖掘算法得到射門規(guī)劃優(yōu)化下的射門運(yùn)動(dòng)最短路徑,且能夠以合理的射門角度實(shí)現(xiàn)射門進(jìn)球。
4 結(jié)果與分析
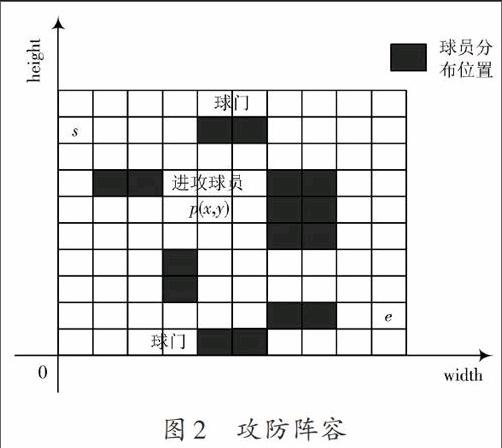
實(shí)驗(yàn)構(gòu)建虛擬的足球運(yùn)動(dòng)場(chǎng)分布環(huán)境,采用Matlab仿真工具進(jìn)行數(shù)據(jù)挖掘算法設(shè)計(jì)和相關(guān)參數(shù)選擇,仿真實(shí)驗(yàn)的硬件環(huán)境為:Intel Core3?530 1 GB內(nèi)存,操作系統(tǒng)為Windows 7,結(jié)合圖1所示的足球運(yùn)動(dòng)場(chǎng)的虛擬網(wǎng)格結(jié)構(gòu),布置球門和攻防陣容如圖2所示。
在上述仿真環(huán)境中,取標(biāo)準(zhǔn)的11人制足球運(yùn)動(dòng)場(chǎng)為測(cè)試環(huán)境,得到在靜態(tài)環(huán)境中的足球攻防路徑分布如圖3所示。
圖4給出了在靜態(tài)環(huán)境下的足球射門角度路徑分布圖。分析圖4得知,采用本文方法在靜態(tài)環(huán)境下進(jìn)行足球最優(yōu)射門角度分析,利用粒子態(tài)的疊加特性能準(zhǔn)確實(shí)現(xiàn)最優(yōu)路徑計(jì)算。
圖5給出采用本文方法和傳統(tǒng)方法在動(dòng)態(tài)未知環(huán)境下分別采取射門初始速度為15 m/s和5 m/s的射門角度和路徑計(jì)算結(jié)果。
分析結(jié)果可見(jiàn),采用本文方法規(guī)劃出的足球射門角度與理想最優(yōu)路徑吻合,表1給出了足球最優(yōu)射門角度計(jì)算參量分析結(jié)果,分析得知,本文方法能在較短的時(shí)間內(nèi)規(guī)劃出足球射門的最優(yōu)角度,計(jì)算開(kāi)銷較低,準(zhǔn)確性較好。
5 結(jié) 語(yǔ)
本文提出基于數(shù)據(jù)挖掘的足球最優(yōu)射門角度分析算法,采用粒子群算法實(shí)現(xiàn)對(duì)足球最優(yōu)射門角度的最優(yōu)特征參量求解。研究結(jié)果表明,該算法進(jìn)行足球最優(yōu)射門角度求解,在復(fù)雜程度不同的球場(chǎng)環(huán)境中能規(guī)劃出一條最優(yōu)進(jìn)球路徑,對(duì)指導(dǎo)足球訓(xùn)練具有一定的實(shí)用價(jià)值。
參考文獻(xiàn)
[1] 喬俊飛.動(dòng)態(tài)路徑規(guī)劃中的改進(jìn)蟻群算法[J].清華大學(xué)學(xué)報(bào),2010,48(z2):1748?1751.
[2] BLASI A, BARBATO S, MATTEI M. A particle swarm approach for flight path optimization in a constrained environment [J]. Aerospace science and technology, 2013, 26(1): 128?137.
[3] 吳憲祥,郭寶龍,龍娟.基于粒子群三次樣條優(yōu)化的移動(dòng)機(jī)器人路徑規(guī)劃算法[J].機(jī)器人,2010,31(6):556?560.
[4] 趙娟平,高憲文,符秀輝,等.移動(dòng)機(jī)器人路徑規(guī)劃的改進(jìn)蟻群優(yōu)化算法[J].控制理論與應(yīng)用,2011,28(4):458?461.
[5] 羅乾又,張華,截興哲,等.改進(jìn)人工勢(shì)場(chǎng)法在機(jī)器人路徑規(guī)劃中的應(yīng)用[J].計(jì)算機(jī)工程與設(shè)計(jì),2011,32(4):1411?1415.
[6] 梁聰剛,王鴻章.微分進(jìn)化算法的優(yōu)化研究及其在聚類分析中的應(yīng)用[J].現(xiàn)代電子技術(shù),2016,39(13):103?107.
[7] 李牧東,趙輝,翁興偉,等.基于最優(yōu)高斯隨機(jī)游走和個(gè)體篩選策略的差分進(jìn)化算法[J].控制與決策,2016,31(8):1379?1386.
[8] 王勛,張代兵,沈林成.一種基于虛擬力的無(wú)人機(jī)路徑跟蹤控制方法[J].機(jī)器人,2016,38(3):329?336.endprint
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:10:36
大眾投資指南(2021年35期)2021-02-16 01:06:26
中國(guó)交通信息化(2020年1期)2020-07-27 02:50:04
電力與能源(2017年6期)2017-05-14 06:19:37
中國(guó)中醫(yī)藥信息雜志(2016年7期)2016-12-01 06:07:55
信息通信技術(shù)(2015年6期)2015-12-26 01:16:46
西安工程大學(xué)學(xué)報(bào)(2014年2期)2014-02-28 18:03:05
河南科技(2014年23期)2014-02-27 14:18:43
電子設(shè)計(jì)工程(2014年18期)2014-02-27 12:00:13
電子設(shè)計(jì)工程(2014年18期)2014-02-27 12:00:12