基于超綠特征與形態(tài)學(xué)的植保無(wú)人機(jī)圖像農(nóng)作物分割
2017-09-12 02:19:14張庭亮甄倩倩
科技創(chuàng)新與應(yīng)用 2017年26期
張庭亮+甄倩倩

摘 要:航拍圖像農(nóng)作物分割為植保無(wú)人機(jī)路徑規(guī)劃與自主導(dǎo)航提供了新的思路。文章基于超綠特征與形態(tài)學(xué)的分割方法,在RGB空間下提取圖像超綠特征,采用OTSU算法基于超綠變換進(jìn)行閾值分割,分割后的圖像使用形體學(xué)方法濾除噪聲,掩模運(yùn)算后得到完整的農(nóng)作物分割圖像。經(jīng)過(guò)實(shí)驗(yàn),可以有效分割出植保無(wú)人機(jī)拍攝的棉花幼苗與玉米苗。
關(guān)鍵詞:超綠特征;形態(tài)學(xué);植保無(wú)人機(jī);圖像分割
中圖分類號(hào):TD40 文獻(xiàn)標(biāo)志碼:A 文章編號(hào):2095-2945(2017)26-0020-03
農(nóng)業(yè)是國(guó)民經(jīng)濟(jì)的基礎(chǔ),在國(guó)家農(nóng)業(yè)政策的推動(dòng)下,精準(zhǔn)農(nóng)業(yè)與規(guī)模化成為農(nóng)業(yè)種植的一種趨勢(shì)。傳統(tǒng)的作業(yè)方式已無(wú)法滿足大規(guī)模種植的需要,植保無(wú)人機(jī)應(yīng)運(yùn)而生。植保無(wú)人機(jī)作業(yè)具有高效、安全、環(huán)保、節(jié)能等特點(diǎn),在植保領(lǐng)域具有獨(dú)特優(yōu)勢(shì),必將成為農(nóng)機(jī)裝備現(xiàn)代化升級(jí)的主要助力[1]。在實(shí)際的作業(yè)條件下,自然環(huán)境復(fù)雜多變,不同作物形態(tài)也存在一定差異。植保無(wú)人機(jī)自主導(dǎo)航和路徑規(guī)劃的能力受限于農(nóng)作物圖像提取,本文以航拍棉花幼苗和玉米苗為研究對(duì)象,可以得到高還原度分割圖像,且具有穩(wěn)定性與抗干擾能力[2-3]。
1 超綠特征提取
1.1 RGB空間
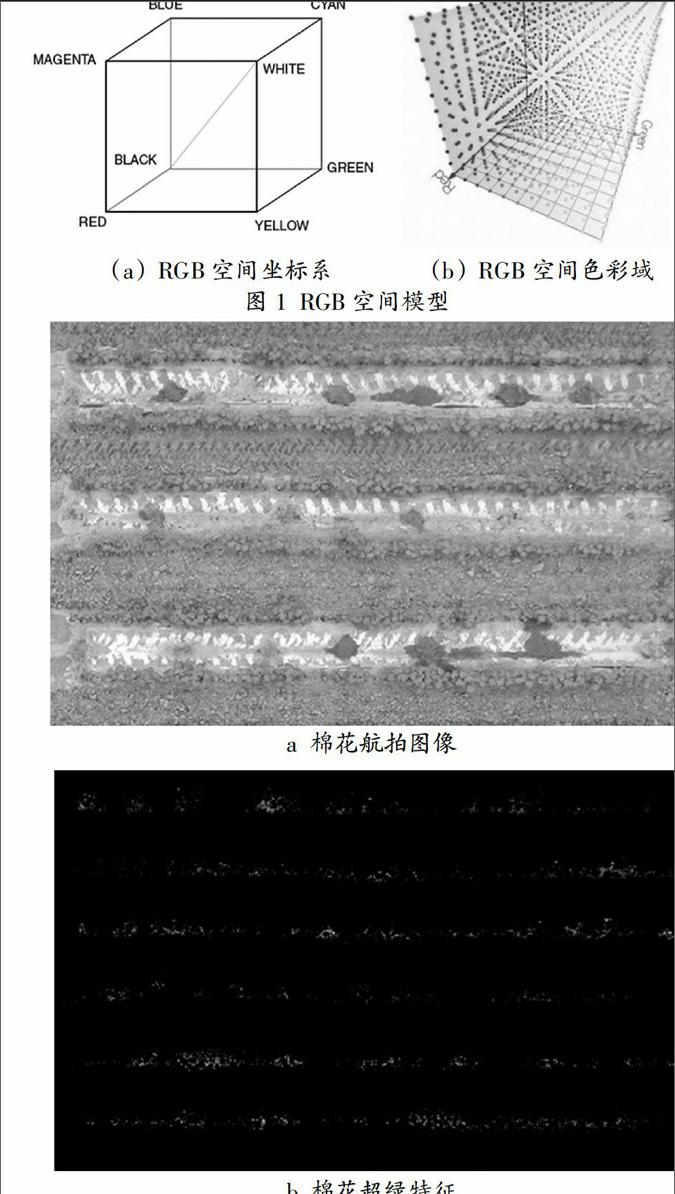
顏色空間是三維彩色空間中一個(gè)可見(jiàn)光子集,包含某個(gè)色彩域的所有色彩,建立過(guò)程基于人的生物學(xué)基礎(chǔ)。視網(wǎng)膜上顏色“傳感器”是錐形感光細(xì)胞,主要分為紅敏細(xì)胞(?姿=564nm)、綠敏細(xì)胞(?姿=534nm)和藍(lán)敏細(xì)胞(?姿=420nm)。RGB 空間在計(jì)算機(jī)視覺(jué)中是一種常用的顏色空間,每種顏色基于笛卡兒坐標(biāo)系出現(xiàn)在紅、綠、藍(lán)的原色光譜分量中。顏色空間建立如圖1(a)所示的立方體,沿著主對(duì)角線從點(diǎn)(0,0,0)的黑色到點(diǎn)(1,1,1)的白色是灰度值。三基色R、G、B相互獨(dú)立,其中任一分量均不能由其它分量運(yùn)算產(chǎn)生,而所有其它顏色都可以由三基色按不同的比例組合得到[4]。RGB 彩色空間顏色域如圖1(b)所示。
RGB三維空間中,目標(biāo)顏色所對(duì)應(yīng)的三個(gè)空間分量都是一個(gè)集合,且對(duì)于相近的顏色,集合不具有唯一性。無(wú)法設(shè)定固定閾值進(jìn)行處理,只能將彩色的分量圖像轉(zhuǎn)化為我們所熟悉的灰度圖像進(jìn)行閾值分割。具體的分割過(guò)程如圖2所示,首先將RGB農(nóng)作物圖像進(jìn)行超綠特征提取,基于超綠特征進(jìn)行OTSU閾值分割,分割圖像經(jīng)過(guò)形態(tài)學(xué)濾除噪聲,掩模運(yùn)算后得到農(nóng)作物分割圖像。
1.2 超綠特征提取
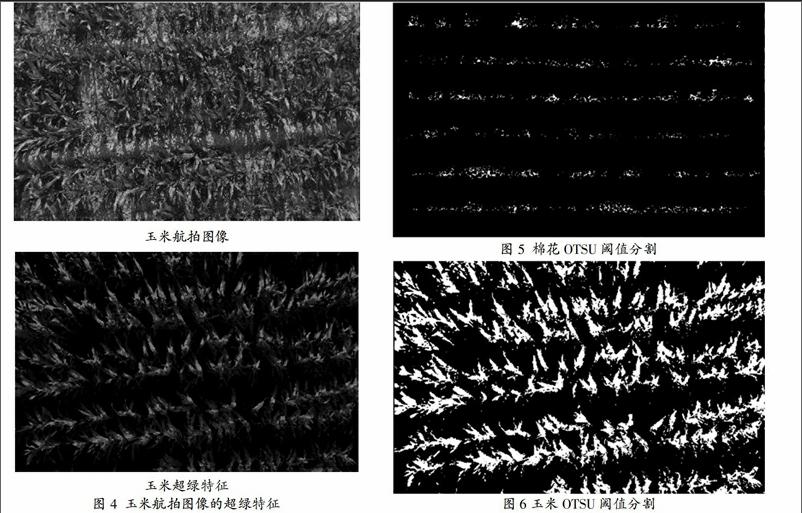
超綠特征2×G-B-R是農(nóng)業(yè)圖像處理中常用的一種特征模型,它提高了綠色通道的權(quán)重,增加了與非綠色背景的對(duì)比度,利用該特征能夠較好地提取出綠色農(nóng)作物的信息。因此該模型被廣泛應(yīng)用于農(nóng)業(yè)產(chǎn)品檢測(cè)、農(nóng)業(yè)機(jī)器人的視覺(jué)導(dǎo)航以及雜草識(shí)別等方面[5]。棉花航拍圖像的超綠特征如圖3所示,玉米航拍圖像的超綠特征如圖4所示。
2 基于超綠特征的閾值分割
經(jīng)過(guò)超綠特征變換的目標(biāo)圖像,閾值分割的方法選擇較多。OTSU閾值法基于分割后類內(nèi)方差最小的最優(yōu)準(zhǔn)則[6-11]。設(shè)航拍圖像M有L個(gè)灰度級(jí)數(shù),第i級(jí)灰度像素點(diǎn)為Ni,圖像的像素總數(shù)為N,則第i級(jí)像素點(diǎn)的概率為Pi=Ni/N,我們?cè)O(shè)定閾值為K,圖像可以分為C0類(灰度級(jí)0~(K-1))與C1類(灰度級(jí)K~(L-1))。航拍圖像的平均灰度為:
(1)
C0類像素的平均灰度:
(2)
C1類像素的平均灰度:
(3)
類間方差計(jì)算式:
其中,?棕0是C0類像素比,?棕1是C1類像素比,閾值K在0~(L-1)中變化,?啄2(k)最小時(shí)獲得最優(yōu)閾值。棉花圖像OTSU閾值分割結(jié)果如圖5所示。玉米圖像OTSU閾值分割結(jié)果如圖6所示。
3 形態(tài)學(xué)濾波
圖像形態(tài)學(xué)運(yùn)算的基本語(yǔ)言是集合論,利用一個(gè)結(jié)構(gòu)集合對(duì)目標(biāo)圖像進(jìn)行探索,結(jié)構(gòu)集合的選取不同則可以在探索的同時(shí)改變目標(biāo)圖像的幾何特征,達(dá)到圖像處理的目的。基礎(chǔ)運(yùn)算如下:
(1)膨脹與腐蝕
二值圖像的形態(tài)學(xué)運(yùn)算,灰度分別為0和1,設(shè)圖像前景區(qū)域是灰度為1的像素集合S,圖像的背景區(qū)域是灰度為0的像素集合。結(jié)構(gòu)元素集合C,膨脹用“?茌”表示[7],定義為:
腐蝕運(yùn)算用“ ”表示,定義為:
(2)二值開(kāi)啟和閉合
二值圖像的開(kāi)啟運(yùn)算和閉合運(yùn)算就是膨脹和腐蝕先后順序不同的組合,定義如下,其中“△”表示開(kāi)啟,“”表示閉合。
形態(tài)學(xué)濾波過(guò)程如圖7所示。
基于MATLAB2015實(shí)驗(yàn)平臺(tái),棉花航拍圖像形態(tài)學(xué)濾波及分割結(jié)果如圖8所示,玉米航拍圖像形態(tài)學(xué)濾波及分割結(jié)果如圖9所示。
4 結(jié)束語(yǔ)
在航拍圖像的RGB空間下提取超綠特征,基于特征圖像采用OTSU閾值法進(jìn)行初分割,采用形態(tài)學(xué)處理濾除噪聲,MATLAB2015實(shí)驗(yàn)平臺(tái)對(duì)棉花與玉米的航拍圖像實(shí)驗(yàn)結(jié)果表明,對(duì)于一般的綠色農(nóng)作物航拍圖像,該方法具有一定的可行性。有助于農(nóng)作物長(zhǎng)勢(shì)預(yù)測(cè)及特征分析,有助于植保無(wú)人機(jī)路徑規(guī)劃與自主導(dǎo)航。
參考文獻(xiàn):
[1]冷志杰,蔣天宇,劉飛,等.植保無(wú)人機(jī)的農(nóng)業(yè)服務(wù)公司推廣模式研究[J].農(nóng)機(jī)化研究,2017(01):6-9.
[2]張俊才,范利勇,李善娟.智能植保機(jī)低矮作物自主作業(yè)導(dǎo)航線提取方法的研究[J].南方農(nóng)機(jī),2017(06):4.
[3]胡泊.基于多維圖像特征的農(nóng)作物長(zhǎng)勢(shì)評(píng)價(jià)方法[D].北京交通大學(xué),2014.
[4]關(guān)叢榮,王虹.基于RGB空間的彩色圖像處理GUI設(shè)計(jì)[J].黑龍江工程學(xué)院學(xué)報(bào),2008(02):66-70.
[5]趙博,宋正河,毛文華,等.基于PSO與K-均值算法的農(nóng)業(yè)超綠圖像分割方法[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2009(08):166-169.
[6]張娜.樹(shù)木圖像分割方法的研究[D].東北林業(yè)大學(xué),2013.
[7]茅正沖,劉永娟.基于顏色特征的玉米雄穗圖像分割[J].傳感器與微系統(tǒng),2017(02):1-4.
[8]申鉉京,劉翔,陳海鵬.基于多閾值Otsu準(zhǔn)則的閾值分割快速計(jì)算[J].電子與信息學(xué)報(bào),2017(01):144-149.
[9]徐青,范九倫.新的基于分解直方圖的三維Otsu分割算法[J].傳感器與微系統(tǒng),2017(01):119-122+126.
[10]肖明堯,李雄飛.基于高斯分解的多尺度3D Otsu閾值分割算法[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2017(01):255-261.
[11]關(guān)強(qiáng),薛河儒,姜新華.基于二維OTSU的田間植物圖像分割方法[J].江蘇農(nóng)業(yè)科學(xué),2015(12):437-440.endprint