智能施肥機的設計
2017-09-14 06:48:28濱州學院電氣工程學院李宏俊賈榮叢
電子世界 2017年17期
濱州學院電氣工程學院 李宏俊 賈榮叢
智能施肥機的設計
濱州學院電氣工程學院 李宏俊 賈榮叢
我國為農業較發達國家,人均占有的耕地面積不足,化肥施用存在很大的問題,因此我國應盡快發展精細農業,特別是變量施肥技術。本文提出了智能施肥機的設計方案,以單片機為控制核心,步進電動機為執行機構的智能施肥機的控制體系。本控制系統主要是單片機輸出變頻脈沖信號改變步進電機轉速,進而改變排肥器排肥速度,最終實現智能施肥的目標,提高了化肥使用效率,提供更加高效的施肥方法。
精細農業;智能施肥;單片機;步進電動機
1 引言
智能施肥技術在中國的發展還處于不成熟階段,然而在外國卻有很多地區開始使用了,我國的智能施肥技術發展還不成熟的原因在于糧食產量的充足忽視了智能施肥的重要性。我國目前的施肥方式除了秸稈還田等可持續的施肥方法外,主要的施肥方法仍然是以人工拋灑的方式進行,不僅占用了大量的勞動力,而且對我國耕地造成鹽堿化,結塊化的影響[1]。人工施肥不能很好的控制施肥量,過量的施用化肥會對土地和水源造成極大的污染。結合國外先進的智能施肥機研究經驗以及國內的施肥現狀,研發適宜本國國情的智能施肥技術已經是刻不容緩。
2 智能施肥機的結構及工作原理
2.1 施肥機結構
機具主要由機具住架、浮動仿形機構、開溝器、播種單體、排肥器、步進電機、地輪、機具速度傳感器和單片機控制系統等組成,結構如圖1所示。
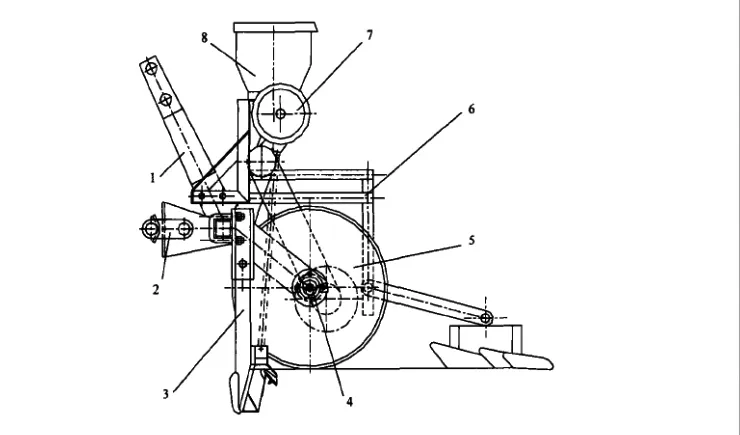
圖1 手動智能施肥機結構簡圖
2.2 系統設計方案
本文主要研究智能施肥技術的四個方面:以單片機為核心的智能施肥系統,步進電動機的速度控制系統,機具速度傳感器以及BCD撥碼盤輸入。機具速度傳感器是用來收集機具前進速度。基于單片機的控制系統是施肥機的控制中心,步進電動機是施肥機的執行機構,BCD撥碼盤作為施肥量的輸入機構。本文采用的編程語言為C語言,核心控制器選用AT89系列單片機。單片機通過速度傳感器獲得施肥機的實時前進速度,單片機結合施肥量以及肥料箱剩余肥料發出變頻脈沖改變步進電動機轉速從而改變施肥機實時排肥量,達到智能施肥的目的。在目前來說,現代控制理論中的控制方式有很多,例如自適應控制、模糊控制、切換控制等好多類。因為本論文采用步進電機作為執行機構,且步進電動機的驅動要求較低,所以本文最終選擇開環控制。系統控制框圖如圖2所示。
該系統要求施肥量由BCD撥碼盤輸入到單片機,單片機發出變頻脈沖改變步進電動機轉速從而改變施肥機實時排肥量,達到智能施肥的目的。
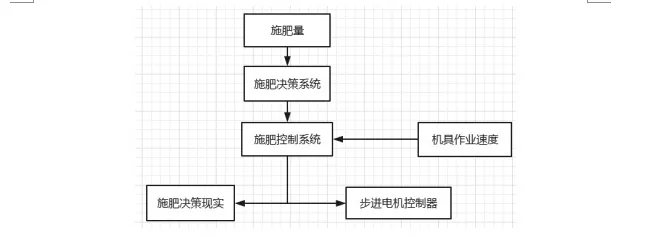
圖2 系統控制框圖
3 軟件設計
單片機內的應用系統軟件主要上采用順序結構的設計方法,一步一步設計出智能施肥機的控制程序。控制程序由主程序和中斷服務程序組成,整個程序由C語言編寫。根據控制系統要達到的要求,制定每一步程序應達到的要求,并設計中斷服務程序,設置中斷優先級。控制流程圖如圖3所示。
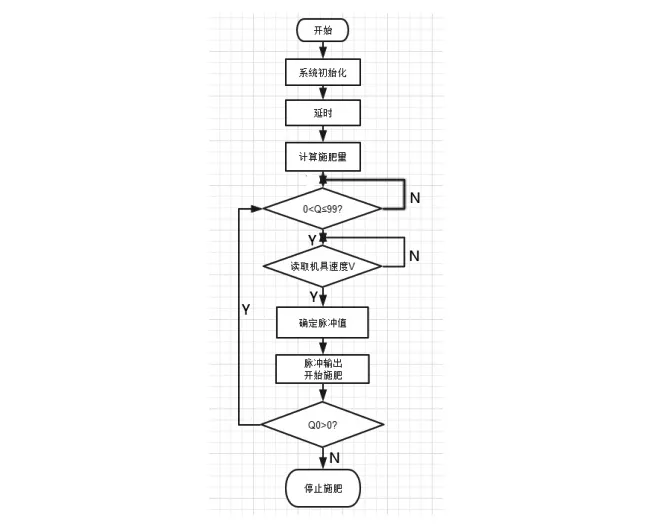
圖3 程序流程圖
4 結論
本文以單片機為控制核心、步進電動機為執行機構設計了一款智能施肥機。本次設計中用戶通過撥碼盤的輸入以及從速度傳感器的信號輸入給單片機從而實現對步進電動機的控制,最終實現控制整個施肥機的目標,從而達到對肥料的節約以及肥料播撒的均勻度,從而提高了化肥使用效率。
[1]郭樹滿.智能控制變量施肥技術的研究[D].河南農業大學,2006.
[2]齊虎春.3S技術在精細農業中的應用及發展[J].農村牧區機械化,2011(03).
[3]董克強,王智輝.精準農業——未來農業發展的趨勢[J].民營科技,2012(04).
[4]梁文甲,胡曉麗,陳艷輝,袁洪印.步進電機智能施肥系統及施肥方案研究[J].安徽農業科學,2012(31).
[5]馬旭,馬成林,桑國旗,莊儉.變量施肥機具的設計[J].農業機械學報,2005(01).
[6]吳舟,鄧芳.基于WCDMA網絡的農業大棚智能監控系統的設計與實現[J].科技創新與應用,2012(34).
國家級大學生創新訓練計劃項目:智能施肥機器人的設計(項目編號:201610449076)。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26