仿生咀嚼6PSS并聯驅動平臺的運動學研究
2017-09-15 06:10:18俞經虎詹民民陳根祿李曉鋒
制造業自動化 2017年8期
關鍵詞:設計
代 欣,俞經虎,詹民民,陳根祿,李曉鋒
(1.江南大學 機械工程學院,無錫 214122;2.江蘇省食品加工技術裝備重點實驗室,無錫 214122)
仿生咀嚼6PSS并聯驅動平臺的運動學研究
代 欣1,2,俞經虎1,2,詹民民1,2,陳根祿1,2,李曉鋒1,2
(1.江南大學 機械工程學院,無錫 214122;2.江蘇省食品加工技術裝備重點實驗室,無錫 214122)
基于食品物性檢測及品質評價、義齒材料檢測及評估等領域的需求,設計了一種仿生咀嚼6PSS并聯驅動平臺。文章介紹了該并聯驅動平臺的基本結構組成,建立了動平臺的運動學模型,并進行運動學分析,得出了位置逆解、速度逆解及雅可比矩陣表達式。在Adams中進行運動學仿真,建立虛擬樣機,給予動平臺一組模擬右側咀嚼運動的軌跡,使其模擬下頜咀嚼食物,得到動平臺及相關構件的位姿參數曲線,為并聯驅動平臺的后續運動學性能分析及優化設計提供參考,為動力學分析奠定了基礎。
仿生咀嚼;并聯驅動平臺;運動學;仿真
0 引言
當前,食品加工業發展迅速,競爭也越來越激烈,食品作為特殊存在,對其質量分析除安全、理化等指標外,客觀的物性評價需求也越來越高。目前主要有兩種評價方式:感官評價和儀器測定,前者即專家組評價,存在一定的主觀性及不易標準化的缺點,后者依靠現有的儀器如質構儀等檢測,由于其只能上下運動擠壓食物,故測量的物性數據與感官測試不一致。仿生機器人將機器人學與現代仿生學相結合,其應用于各個領域中并具有廣闊的開發前景[1]。鑒于人類下頜運動是集平移與旋轉于一體的復雜三維運動,咀嚼機器人[2]便是根據下頜運動的特點研制出來的,通過咀嚼機器人對食品物性進行檢測,能夠客觀準確地評價食品的質地。國外對咀嚼機器人研究較早,并且較為先進,如日本早稻田大學的WY系列咀嚼機器人[3]、澳大利亞Mark Ⅲ的咀嚼機構[4]、新西蘭梅西大學的6RSS食品咀嚼機器人[5]等。相對而言,國內則起步較晚,不過隨著并聯機器人[6,7]的發展、國家的重視及行業的發展需要,也取得了一些發展,如孫忠雷等[8]的仿生咀嚼裝置、大連理工大學叢明等[9]的仿下頜運動機器人等。作為機器人領域的新產品,咀嚼機器人應用于食品質地評價的同時,也可用醫療行業,如義齒材料的檢測與評定、下頜康復訓練等。本文提出了一種6PSS咀嚼機器人并聯驅動平臺,對其進行運動學[10,12]等深入研究,不僅有助于促進國內服務機器人的快速發展,也將提高我國食品行業的裝備自動化程度,同時推動我國醫療行業的發展。
1 機構總體介紹
設計的6PSS并聯機器人整體結構如圖1所示,該并聯咀嚼平臺控制算法較為簡單,考慮到靜平臺的設計難度以及后續實驗的可行性和易操作性,將連接分支設置在動平臺下方。整體設計綜合考慮了人類下頜系統以及生物力學特性。
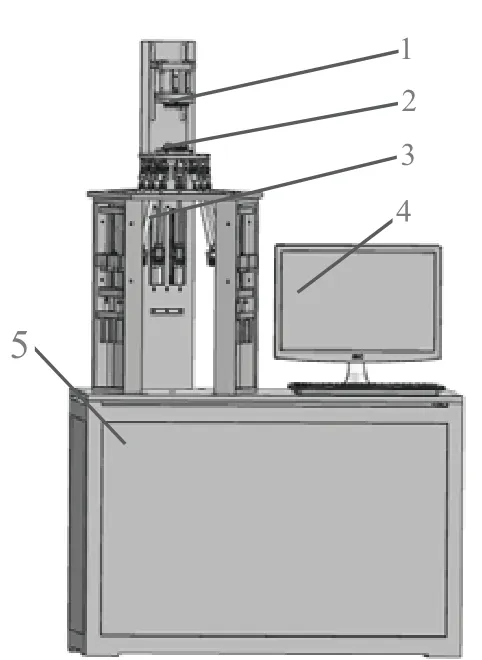
圖1 6PSS并聯機器人整體結構
本文研究的仿生咀嚼6PSS并聯驅動平臺便是上述并聯機器人的重要結構組成部分,其CAD模型和結構簡圖如圖2所示,該機構由靜平臺(模擬人類上頜)、動平臺(模擬人類下頜)和六條支鏈(模擬肌肉)組成(該圖中靜平臺和機架省略)。
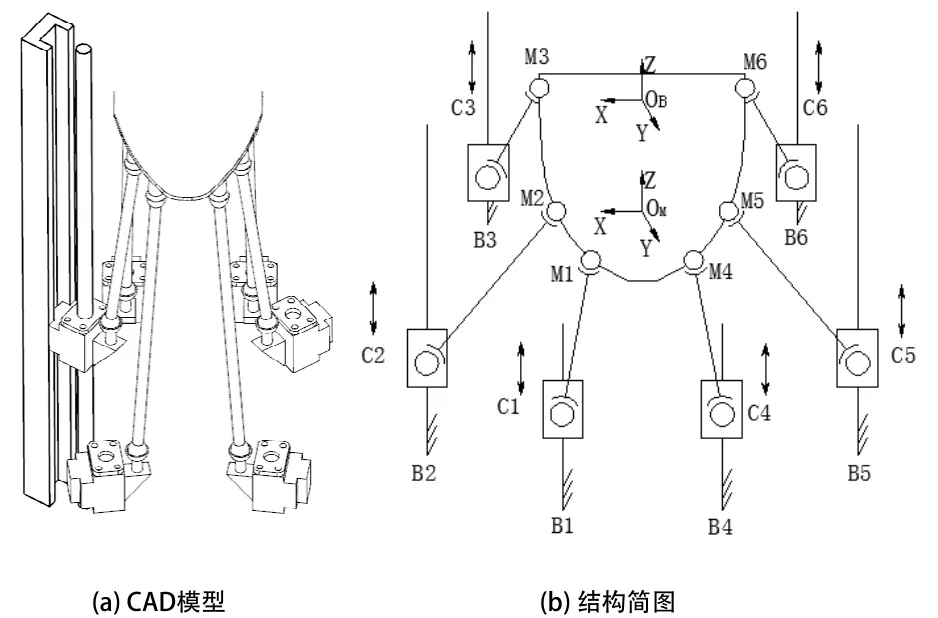
圖2 仿生咀嚼6PSS并聯驅動平臺CAD模型及結構簡圖
為方便敘述,將支鏈標記為1-6號,圖2結構簡圖中各下標字母與之對應。該并聯驅動平臺關于YOZ平面對稱,動平臺通過6根支鏈與機架相連,每根支鏈由導軌、滾珠絲杠、滑塊組成的移動副(P)、連桿一端與滑塊連接的球副(S)和連桿另一端與動平臺連接的另一球副(S)組成。圖中OM、OB分別為動坐標系和固定坐標系,Bi、Ci和Mi分別表示絲杠固定于基座位置、與滑塊相連的球副在固定坐標系中的位置和與動平臺相連的球副在固定坐標系下的位置(其中i=1,2,…,6),下同。根據Kutzbach Grubler公式,可計算得到驅動平臺自由度,計算公式如下:

式(1)中,m為機構自由度數,本文中機構個數n=14,運動副數g=18,第i個運動副的相對自由度數fi=7(其中移動副為1,兩個球副各為3),局部自由度f0=6,因此,本機構自由度:

根據式(2)可知,仿生咀嚼6PSS并聯驅動平臺結構自由度為6。
3 動平臺運動學分析
3.1 運動學建模
基于上文建立好的坐標系,進行動平臺位姿計算,動平臺坐標系OM在固定坐標系OB中的齊次旋轉矩陣為:
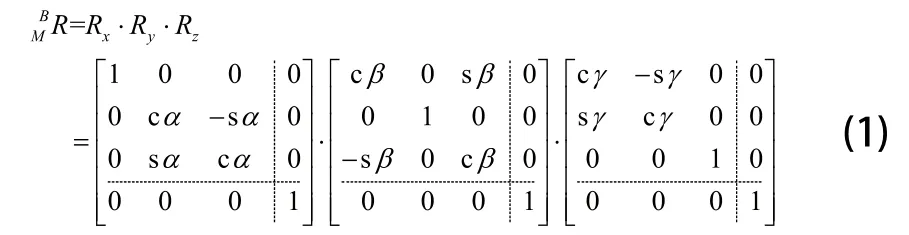
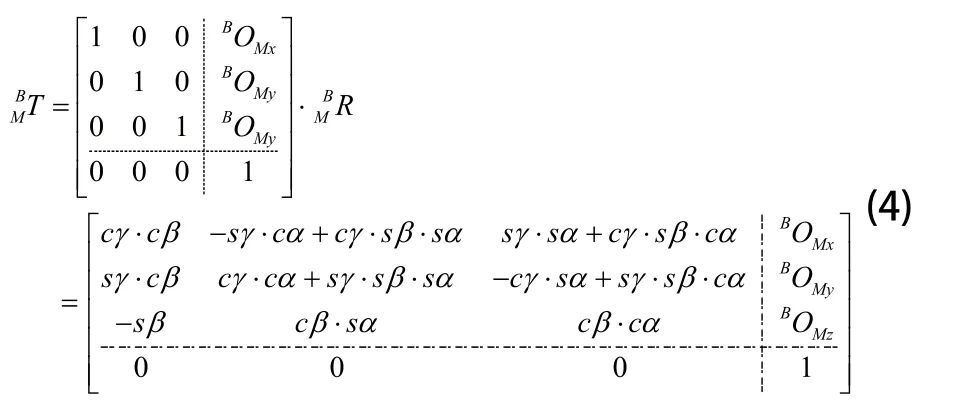
由此,運動學模型建立完畢,可以進行進一步的逆解分析。
3.2 位置逆解
如圖3所示,為6根支鏈中任一支鏈簡圖,由此可知:

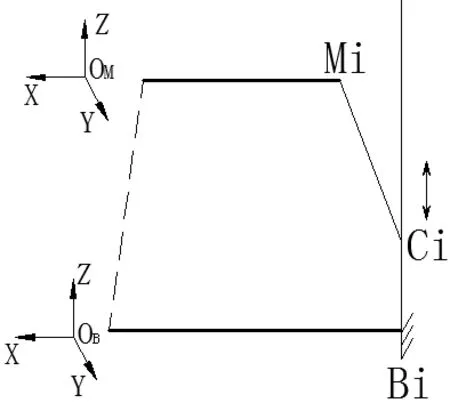
圖3 單支鏈簡圖
式(5)中Li為桿長,分析該機構簡圖,可知:
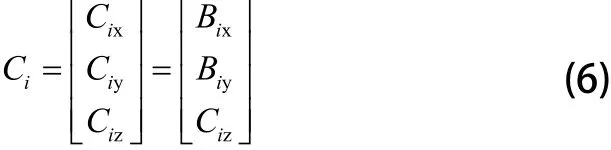
式(6)中機構尺寸參數Bix、Biy已知,Ciz未知,位置逆解就是要求出Ciz在固定坐標系OB中坐標,也就是滑動副Pi在空間中的位置坐標。
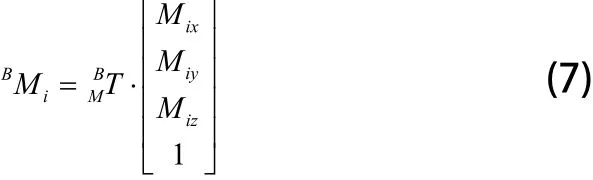
式(7)兩邊平方,得到:

整理式(8),并考慮滑動副Pi處于動平臺下方,故取負值,得到:

此時,式(9)等式右側均為已知量,可以利用Matlab數值求解求出。
3.3 速度逆解
由上一節式(9)可知,Ciz是OM相對于OB變化參數的函數,則速度逆解可以由速度、位移關系推導得到。
因為Ciz是關于的函數,對時間求導,可得:

式(10)整理可得:
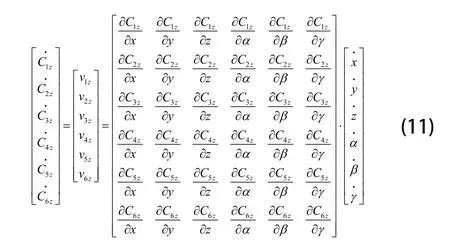
3.4 雅可比矩陣
上節中式(11)可以簡寫,得到:

其中矩陣J:
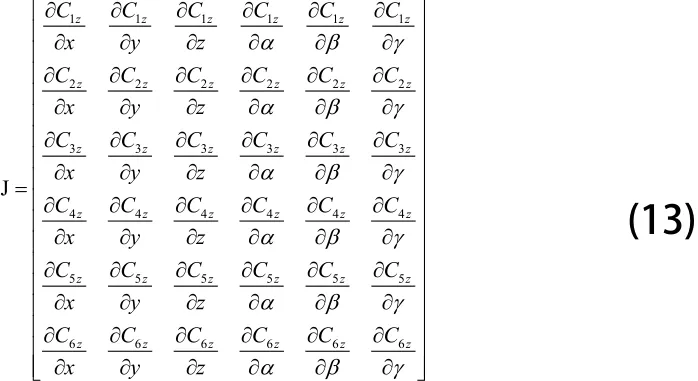
J即為驅動平臺的雅可比矩陣,它反映了輸入與輸出之間的線性關系,故也稱為一階影響系數矩陣,它與整個機構的位姿以及各個分支運動副的方向有關。其具體數值也可由Matlab程序求解。
4 動平臺運動學仿真
4.1 虛擬樣機建立
將UG建立好的仿生咀嚼6PSS并聯驅動平臺模型轉換成中間格式,并進行相關處理,如檢查坐標系、添加運動副、廣義驅動等,構建好的虛擬樣機[13,14]如圖4所示,其中需要固定的部件如機架、導軌、靜平臺等均被隱藏。

圖4 仿生咀嚼6PSS并聯驅動平臺Adams虛擬樣機
4.2 設計咀嚼運動軌跡
為了對仿生咀嚼驅動平臺進行逆運動學仿真,同時考慮到下頜運動狀態的復雜性,現根據下頜咀嚼幅度及相關咀嚼規律,為動平臺設計一組咀嚼運動軌跡,并設定其周期為1秒,用以模擬人類右側咀嚼食物。本文結合Adams中的IF函數,采用三角函數模擬逼近來進行運動軌跡控制。在動坐標系上添加廣義驅動,得到位姿關于時間表達式,如下:
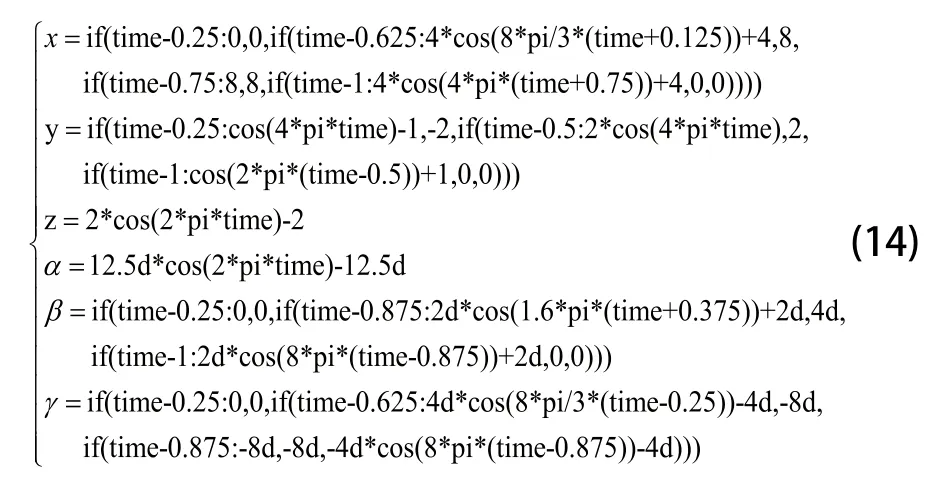
式(14)中d表示角度符號。
4.3 仿真結果
運動學仿真結果如下,圖5(a)、(b)、(c)分別表示仿真右側咀嚼運動時,動平臺質心位移、速度、加速度隨時間變化曲線。

圖5 動平臺質心位移、速度、加速度曲線
圖6(a)、(b)、(c)分別表示仿真右側咀嚼運動時,動平臺相對于靜坐標系轉角、角速度、角加速度隨時間變化曲線。
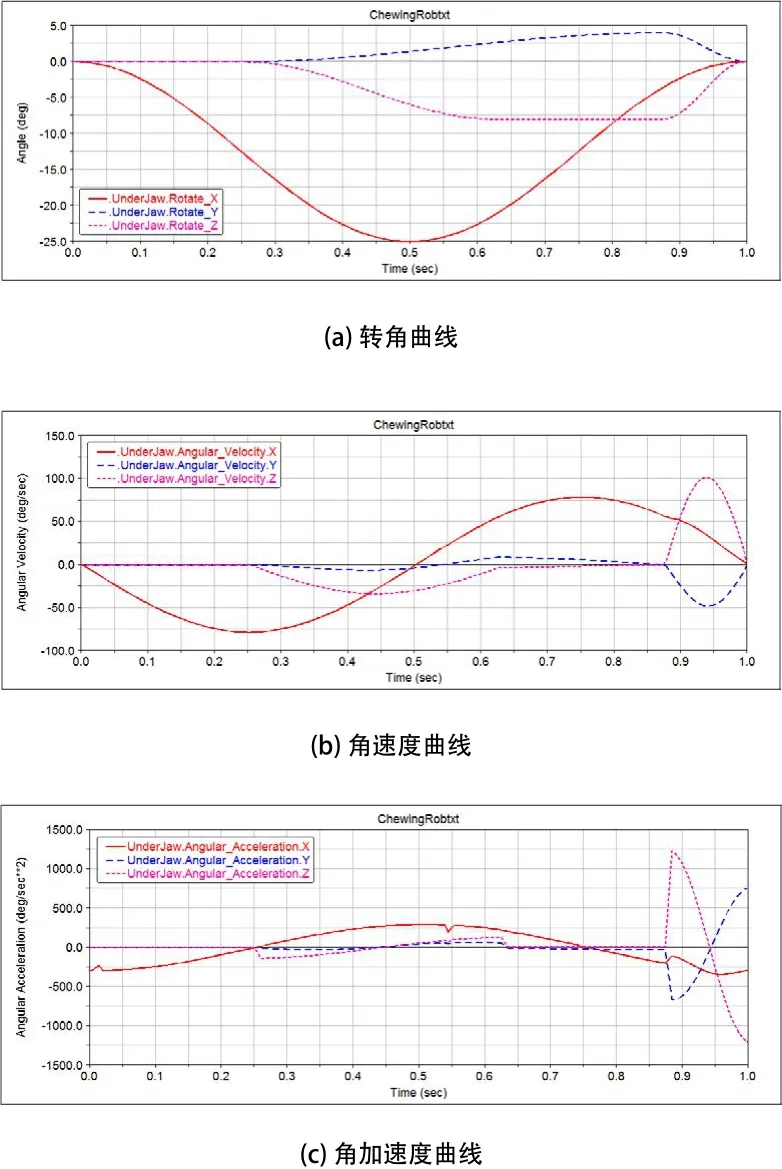
圖6 動平臺相對于靜坐標系轉角、角速度、角加速度曲線
通過對上述位姿曲線進行分析,可知設計的咀嚼運動軌跡具有一定的仿生性能,速度、角速度、加速度、角加速度等和人類真實咀嚼運動規律較為吻合。
為模擬下頜切牙的運動軌跡,在動平臺上設置一參考點,則其運動軌跡如圖7所示。
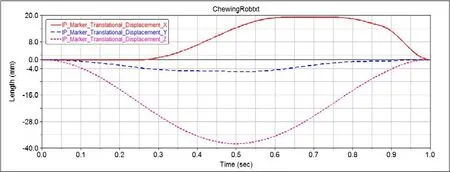
圖7 下頜切牙咀嚼運動位移曲線
通過分析上述曲線,發現其咀嚼運動幅度均超出正常范圍,說明所設計的仿生咀嚼6PSS并聯驅動平臺具有較好的仿生性能,能夠較為真實地模擬人類右側咀嚼食物。
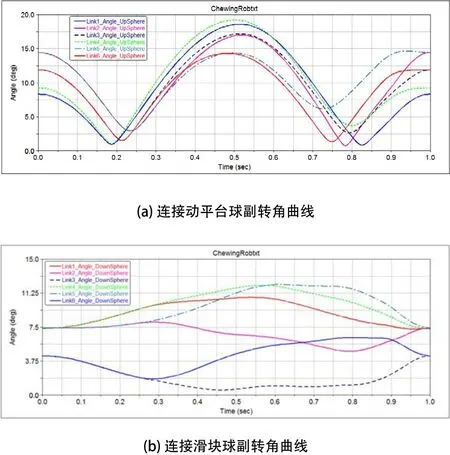
圖8 連接動平臺球副和連接滑塊球副的轉角曲線
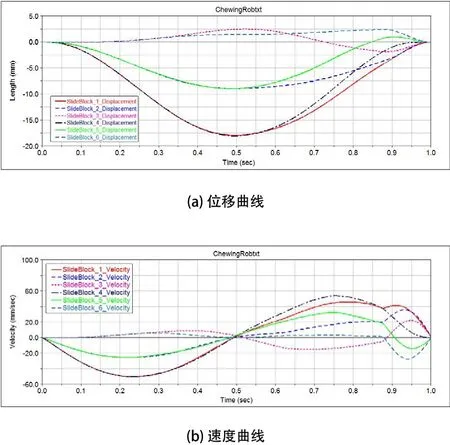
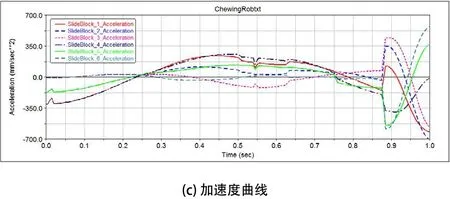
圖9 滑塊的位移、速度、加速度曲線
同時,通過逆運動學仿真,也可得到圖8的球副位姿曲線和圖9的滑塊的位姿曲線,為后續機構的運動學性能分析和優化設計奠定了基礎。
5 結論
1)設計了一種仿生咀嚼6PSS并聯驅動平臺,并對其進行了運動學分析,得出了位置逆解、速度逆解和雅可比矩陣表達式。
2)運用Adams軟件構建了虛擬樣機,對機構進行了運動學仿真,通過給定一組模擬人類右側咀嚼運動的軌跡參數,模擬人類咀嚼食物,得到了動平臺位移、轉角、速度、角速度、加速度、角加速度隨時間變化的位姿曲線以及球副、滑塊的位姿曲線,一定程度上考察了平臺機構部件的相對運動狀態,同時也證明了該機構能夠較好地模擬人類右側咀嚼食物,符合咀嚼運動規律,為評價和檢測系統的運動特性提供了依據。
3)對仿生咀嚼6PSS并聯驅動平臺進行運動學分析,為下一步機構優化和動力學分析等深入研究奠定了基礎。咀嚼機器人的應用與發展,不僅提高了食品物性評價的客觀性與準確性,還將推動服務機器人在我國食品加工業的應用,提高其裝備自動化水平,同時,咀嚼機器人還可應用于義齒檢測與評估、下頜障礙訓練等醫療領域,推動醫療行業的發展。
[1] 吉愛紅,戴振東,周來水.仿生機器人的研究進展[J].機器人,2005,27(3):284-288.
[2] 叢明,萇占波,杜宇,等.咀嚼機器人的研究現狀與發展[J].機器人技術與應用,2009,(6):21-24.
[3] Takanobu H, Maruyama T, Takanishi A, et al. Mouth opening and closing training with 6-DOF parallel robot[c].the 2000 IEEE International Conference on Robotics and Automation, San Francisco, April 2000: 1384-1389.
[4] C. BOWEY, D. BURGESS. Robotic temporomandibular joint,Final Year Project Report[R].University of Adelaide, Adelaide ,2005.
[5] Xu WL, Lewis d, Bronlund J, et al. Mechanism, design and motion control of a linkage chewing device[J].Mechanisms and Machine Theory,2008,43(2):376-389.
[6] 叢爽,尚偉偉.并聯機器人—建模、控制優化與應用[M].北京:電子工業出版社,2010,1-15.
[7] 畢軍.6-PSS并聯機器人的運動學及動力學研究[D].重慶:重慶大學,2011,1-11.
[8] 孫鐘雷,孫永海,萬鵬等.仿生咀嚼裝置設計與試驗[J].農業機械學報,2011,42(8):214-218.
[9] 劉同占.仿下頜運動機器人設計及仿生性能研究[D].大連:大連理工大學,2012,3-16.
[10] 吳培棟.Stewart平臺的運動學與逆運動學的基礎研究[D].武漢:華中科技大學,2008,31-45.
[11] 孟廣柱.3-RRRT并聯機器人運動學和動力學建模[D].天津:天津理工大學,2009,35-50.
[12] 史浩明.6-PUS并聯機構動力學分析及優化設計[D].重慶:重慶大學,2012,40-55.
[13] 杜婧.仿下頜運動機器人的樣機設計和實驗研究[D].大連:大連理工大學,2014,11-38.
[14] 雷孟冬.六自由度咀嚼虛擬樣機設計[D].成都:電子科技大學,2010,1-40.
Kinematics analysis of bionic chewing 6PSS parallel driven platform
DAI Xin1,2, YU Jing-hu1,2, ZHAN Min-min1,2, CHEN Gen-lu1,2, LI Xiao-feng1,2
TP391.9
:A
:1009-0134(2017)08-0034-04
2017-06-14
國家自然科學基金項目(51375209)
代欣(1993 -),女,湖北孝感人,碩士研究生,研究方向為仿生機器人。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
