雙弧面凸輪式步進驅動型機械手的設計及仿真分析
2017-09-22 03:45:08葛正浩
食品與機械 2017年7期
關鍵詞:設計
葛正浩
申嬌娟
司賢永
韓嘯宇
(陜西科技大學機電工程學院,陜西 西安 710021)
雙弧面凸輪式步進驅動型機械手的設計及仿真分析
葛正浩
申嬌娟
司賢永
韓嘯宇
(陜西科技大學機電工程學院,陜西 西安 710021)
以弧面凸輪機構為基礎,設計雙弧面凸輪式步進驅動型機械手來實現機械手輸出執行件“提升—前進—下降—后退”的步進運動。根據機械手輸出的目標循環動作,設計運動循環圖。利用Creo3.0建立雙弧面凸輪式步進驅動型機械手的數字化樣機,最后基于ADAMS進行運動學仿真分析,輸出執行件的位移、速度、加速度以及碰撞力與碰撞力矩的曲線,驗證了設計結果的正確性。
雙弧面;凸輪式機構;步進驅動型;機械手;運動循環圖;動力學分析
在自動化生產線中經常需要某一個機器實現一個非常單一的步進動作,其主要特點是輸出執行的動作具有定周期的動停運動。傳統的氣壓或液壓控制執行的搬運機械手,加速度和速度很難做到平緩過度,特別在開始和停止時動作太過迅猛、沖擊剛度非常大;電動機驅動控制型的機械手,對企業技術人員的綜合技能要求較高,由于核心技術被國外壟斷,導致成本較高;凸輪機構可使輸出構件實現步進運動,幾乎所有簡單的、復雜的重復性機械運動都可以用凸輪機構或含其在內的組合機構實現。凸輪機構作為驅動控制機構的機械手, 具有動作精準、工作速度可控、使用成本低、布局緊湊等優點[1-2],目前在自動化生產線中應用越來越多。國外對于凸輪式機械手的應用研究較早,日本已經研究出多種形式的凸輪式機械手,并使凸輪式機械手進入了系列化生產階段[3-4];歐美國家在凸輪式機械手方面的研究也處于領先地位;而中國對于凸輪式機械手的研究起步較晚,尤其是對于不易加工的弧面凸輪的應用研究甚少[3-4]。凸輪式步進驅動型機械手的提出始于德國Ferguson公司,由美國CAMCO公司在此基礎上進一步發展并進行生產,而中國使用這種裝置都依賴于進口,價格昂貴,而且使用和維修都需要專業的人員指導,不利于生產需求[3]。雙弧面凸輪式步進驅動型機械手可以廣泛應用于包裝自動化生產線上,有利于產品的系列化,所以雙弧面凸輪式步進驅動型機械手的研究很有意義。隨著計算機技術的發展,可以對機器的真實運動情況進行模擬,進而對樣機中的缺陷進行改進,以開發與試驗檢測并行的設計方式設計出符合要求的物理樣機,最大限度地提高設計效率及整機質量。本研究基于Creo3.0建立雙弧面凸輪式步進驅動型機械手的數字化樣機[5-6],然后應用ADAMS進行動態仿真分析,其動態性能參數對凸輪式步進驅動型機械手的設計具有非常重要的指導意義。
1 雙弧面凸輪式步進驅動型機械手的設計
1.1 雙弧面凸輪式機構的設計方案
本設計的步進驅動型機械手的輸出執行件的升降與進退直線運動均由弧面凸輪帶動從動盤上的擺桿往復擺動來實現。擺桿的圓弧運動在二維平面內可以分解為互相垂直的2種運動,多余的運動靠滑槽分解。此設計整體結構簡單,設備體積小且弧面凸輪機構會提高輸出端塊的定位精度等級,雙弧面凸輪式設計方案見圖1。

1. 輸出端塊 2,6. 擺桿 3,7. 從動盤 4. 升降弧面凸輪 5. 凸輪軸 8. 進退弧面凸輪
圖1 雙弧面凸輪式方案設計
Figure 1 Conceptual design of globoidal cam
1.2 運動循環圖的設計
機械手手臂的運動循環圖采用直角坐標式可以直觀地展示出機械手手臂的動作順序。雙弧面凸輪式步進驅動型機械手所輸出的動作為“提升—前進—下降—后退”,升降和進退動作各由一個弧面凸輪機構控制,凸輪的輪廓曲線為1個推程期、1個回程期和2個停歇期。圖 2是以輸出端升降距離50 mm和進退距離100 mm,凸輪軸按照“60°—120°—60°—120°”分度為例設計的運動循環圖[7],其中x軸代表弧面凸輪主軸轉動角,y軸代表機械手輸出執行件的位移。

圖2 機械手手臂工作循環圖
步進驅動型機械手的一個完整的執行件輸出動作中,分別由升降和進退弧面凸輪機構驅動機械手實現。凸輪軸的連續轉動通過弧面凸輪機構可以轉變成從動件的間歇往復擺動,擺動滾子從動件弧面凸輪機構從動件的工作運動過程可分為停歇、升程、停歇、回程4個階段,在弧面凸輪的回轉體上既有升程段也有回程段,即 “左旋”與“右旋”同在。當機械手輸出執行件的運動位移較大時,小擺角會使凸輪機構的擺桿過長,使得機械手的整體體積增大,同時使凸輪的接觸力變大,可以采用多頭擺動滾子從動件弧面凸輪機構,增加從動件的擺角以減小擺桿長度,優化機構的動力性能,同時能夠提高機器的承載能力[6]。單頭和多頭擺動滾子從動件弧面凸輪的展開示意圖見圖3。升降和進退弧面凸輪的三維實體模型見圖4。

圖3 擺動滾子從動件弧面凸輪展開示意圖
Figure 3 Schematic diagram after deployment of globoidal cam with oscillating roller follower

圖4 弧面凸輪模型圖
1.3 雙弧面凸輪式步進驅動型機械手的數字化樣機
減速電動機輸出動力帶動凸輪軸轉動,凸輪軸上固定連接有進退和升降弧面凸輪,2弧面凸輪分別帶動從動盤作周期性擺動,再通過擺桿和滑槽使間歇擺動轉化為直線運動,2直線運動通過有規律的運動組合使機械手臂實現“提升—前進—下降—后退”定周期性的動作。將各個零部件按照功能要求進行裝配,雙弧面凸輪式步進驅動型機械手數字化樣機模型見圖5。

圖5 雙弧面凸輪式機械手數字化樣機
2 步進驅動型機械手的動力學仿真模型
2.1 機械手動力學仿真模型的建立
將Creo3.0中的凸輪式步進驅動型機械手模型保存為“x_t”格式的副本文件,然后在ADAMS中通過Import選項導入該模型[8-9]。模型導入后,零件的質量屬性和約束關系均丟失需要重新設置;同時為了使分析過程更符合實際情況,對重力加速度和單位進行設置。
2.2 添加約束及設置接觸力
該模型需要添加的約束分別為:雙弧面凸輪分別與主動軸之間的固定副;滑軌與大地之間的固定副;凸輪軸與大地之間的旋轉副;擺桿與大地之間的旋轉副;滑塊與滑軌之間的移動副。
碰撞接觸力是作用在物體上的特殊力,只有當物體的幾何外形相互接觸時才會有接觸力的作用。根據凸輪和滾子的幾何參數確定接觸剛度(k)、力的指數值(e)、阻力系數(C)和全阻尼時的穿透值(δ),將弧面凸輪與從動盤之間的接觸等效為2個變曲率半徑柱體的碰撞問題,碰撞力定義[10]如下:
(1)
式中:
STEP——階躍函數;
q0——兩物體間初始距離,mm;
q——構件碰撞過程中的實際距離,mm。
2個變曲率半徑柱體在接觸時產生的接觸法向力P和變形δ的關系有:
P=K×δ3/2。
(2)
接觸剛度的公式:
K=(4/3)R1/2×E*,
(3)
其中:1/R=1/R1+1/R2,R1、R2分別是弧面凸輪和滾子接觸點的當量半徑,mm。

(4)
式中:
μ1、μ2——分別為凸輪和滾子材料的泊松比;
E1、E2——分別為凸輪和滾子所選材料的彈性模量。
一般情況下,與凸輪的曲率半徑相比滾子半徑很小,所以:1/R≈1/R2。
2.3 外部載荷的定義及添加驅動
凸輪式步進驅動型機械手一個完整的運輸過程包括提升、前進、下降、后退4個動作。凸輪軸從0°旋轉到10°時機械手處于空載時期不承受外部工件重量,凸輪軸從10°旋轉到15°時機械手開始承受外部工件重量;凸輪軸從15°旋轉到225°時機械手完成運輸過程,手臂一直承受外部工件重量;凸輪軸從225°旋轉到230°時開始放置工件,手臂承受的外部載荷逐漸為0;凸輪軸從230°旋轉到360°時機械手完成復位動作外部載荷為0[11]。
本設計機械手的外部載荷STEP函數定義為:
step(time,0.056,0,0.83,50)~step(time,1.25,0,1.28,50),
(5)
在凸輪軸和大地的旋轉副上給定電機驅動,凸輪旋轉的角速度值為30 r/min。雙弧面凸輪式機械手的虛擬樣機見圖6。

圖6 雙弧面凸輪式機械手仿真模型
3 步進驅動型機械手的仿真分析
3.1 仿真求解參數的設置
為了得到精確度較高的速度曲線、加速度曲線,提高求解的穩定性,需要對仿真輸出步長(步數500和仿真時間2 s)和求解器(Wstiff積分器和SI2積分形式)進行設置,在仿真步長很小的情況下也能保證雅克比矩陣的穩定性。
3.2 仿真結果及分析
以機械手輸出端為研究對象,求解其位移、速度、加速度[9-10],以弧面凸輪與滾子為對象求解其接觸力(Force)與接觸力力矩(Torque)。
如圖7、8所示,3條曲線分別是雙弧面凸輪式機械手完成進退(升降)動作時輸出端的位移、速度和加速度曲線,速度最大值出現在推程中點,且位移、速度和加速度曲線與修正正弦運動規律理論曲線相符,速度及加速度曲線基本上沒有抖動,說明其運動特性良好。
最大接觸力和最大接觸力矩見圖9、10。由仿真結果知:機械手速度最大時凸輪機構的碰撞力和碰撞力矩最大,在停歇段凸輪機構的碰撞力和碰撞力矩最小,符合實際情況。
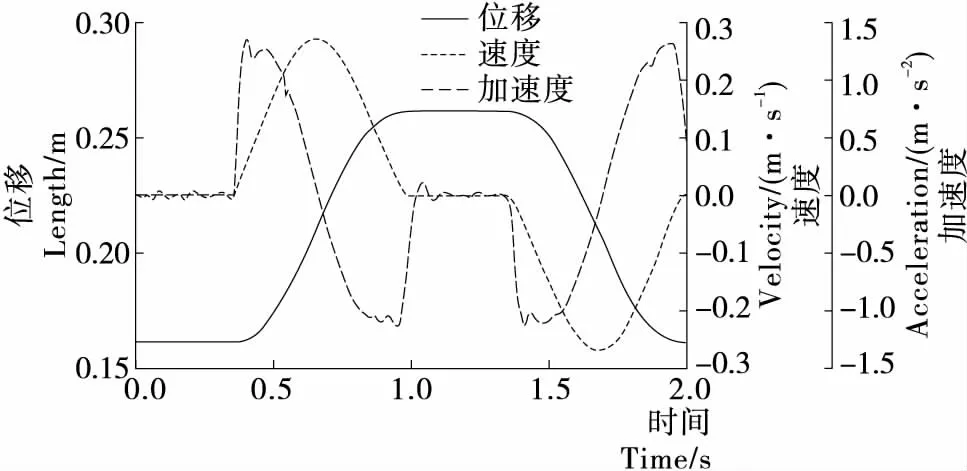
圖7 機械手進退動作位移、速度和加速度曲線
Figure 7 Displacement, velocity and acceleration curve of manipulator forward and backward movement

圖8 機械手升降動作位移、速度和加速度曲線

圖9 進退弧面凸輪機構碰撞力和碰撞力矩曲線

圖10 升降弧面凸輪機構碰撞力和碰撞力矩曲線
4 結論
根據機械手的執行動作設計凸輪運動循環圖,設計一款凸輪式步進驅動型機械手;建立該機械手的數字化樣機,尤其是對兩端的弧面凸輪進行了參數化建模;最后通過ADAMS對整機進行了仿真驗證和分析。結果表明,該機械手的位移、速度和加速度曲線與修正正弦運動規律理論曲線相符,速度及加速度曲線基本上沒有抖動,運動特性良好,碰撞力和碰撞力矩也符合實際情況。試驗只對步進驅動型機械手進行了多剛體動態仿真,為了更加接近實際工作環境,今后可對機構進行剛柔耦合的動力學分析。
[1] 曹西京, 曹巨江. 弧面凸輪鋼球式機械手的設計研究[J]. 研究·設計·制造, 2003(2): 32-33.
[2] 余劍武, 舒新, 羅紅, 等. 灌裝機中弧面凸輪建模與造型研究[J]. 食品與機械, 2016, 32(6): 77-82.
[3] 楊妮. 沖壓上下料直動型弧面凸輪機械手的設計與研究[D]. 西安: 陜西科技大學, 2007: 8-9.
[4] 劉慶立. 弧面凸輪機械手的參數化與仿真[D]. 西安: 陜西科技大學, 2009: 3-4.
[5] 黃薇, 葛正浩, 劉韋華, 等. 基于VB6.0和Pro/E的弧面分度凸輪三維參數化實體建模[J]. 機械傳動, 2012(9): 41-44.
[6] 曹鵬, 葛正浩, 劉小琴. 基于Pro/E的多頭弧面凸輪三維建模及運動仿真[J]. 機械傳動, 2016, 40(7): 97-100.
[7] 杜鈞祖, 賈爭現, 曹巨江. 滾子齒形凸輪循環圖的設計與分析[J]. 西北輕工業學院學報, 2002, 20(5): 30-33.
[8] 秦成. 基于Pro/E和ADAMS的凸輪機構虛擬樣機研究[J]. 機械工程與自動化, 2008(4): 35-36.
[9] 席曉燕. 推料機構凸輪輪廓曲線設計仿真及誤差分析[J]. 食品與機械, 2017, 33(2): 77-80.
[10] 石明金. 基于ADAMS的多接觸研究[J]. 計算機工程與應用, 2004(29): 220-222.
[11] 馬志平. 弧面分度凸輪機構剛柔耦合動力學研究[D]. 西安: 陜西科技大學, 2014: 43-60.
Design and simulation analysis for double globoidal cam-type stepping drive manipulator
GEZheng-hao
SHENJiao-juan
SIXian-yong
HANXiao-yu
(MechanicalandElectricalEngineeringCollege,ShaanxiUniversityofScienceandTechnology,Xi’an,Shaanxi710021,China)
Based on the theory of globoidal cam mechanism, the double globoidal cam-type stepping-driven manipulator is designed to realize the step-by-step movement of the actuator output “lifting, forward, falling, retreating”. According to the target rotation of the robot output, design the motion cycle diagram. Finally, the kinematic simulation analysis based on ADAMS, the displacement of the actuator, the velocity, the acceleration curve and the curve of the collision force and the collision torque were analyzed by using Creo3.0 to build the digital prototype of the double globoidal cam-type stepping-driven manipulator . To verify the correctness of the design results.
Double globoidal cam mechanism; step-driven manipulator; motion cycle diagram; dynamics analysis
西安市科技計劃項目(編號:CXY1431﹝3﹞);陜西省教育廳服務地方專項計劃項目(編號:15JF010)
葛正浩(1964—),男,陜西科技大學教授,碩博士研究生導師,博士。E-mail:285188506@qq.com
2017—04—05
10.13652/j.issn.1003-5788.2017.07.016
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
