一種被動相控陣雷達搜索調度算法研究
2017-10-09 06:08:34皇甫一江楊玉亮趙海東江偉偉
雷達與對抗 2017年3期
皇甫一江,楊玉亮,趙海東,江偉偉
(1. 海軍裝備部信息系統局,北京 100841; 2. 中國船舶重工集團公司第七二四研究所,南京 211153)
一種被動相控陣雷達搜索調度算法研究
皇甫一江1,楊玉亮2,趙海東2,江偉偉2
(1. 海軍裝備部信息系統局,北京 100841; 2. 中國船舶重工集團公司第七二四研究所,南京 211153)
被動相控陣雷達在一個波束周期內可實現多波束寬角覆蓋,同時波束指向可快速變化。利用該特點,合理設計搜索調度算法可靈活地完成指定空域的搜索。從被動相控陣雷達波束駐留特點出發,設計了一種基于區域交疊的搜索調度算法。算法加入隨機序列控制駐留順序,可有效避免輻射源旋轉周期與駐留周期相同導致目標無法截獲,在仿真環境完成算法的實現和測試。測試結果驗證了算法的有效性。
被動相控陣;搜索調度;波束駐留;隨機序列
Abstract: Multi-beam wide-angle coverage and rapidly variable beam pointing can be simultaneously realized in one beam cycle for the passive phased array radars. The search and scheduling algorithm can be reasonably designed to search the designated airspace flexibly by using this characteristic. From the characteristics of beam dwell of the passive phased array radars, a search and scheduling algorithm is designed based on region overlapping. The targets cannot be intercepted when the rotation period of the radiation source is identical to the dwell period. The algorithm along with the random sequence controls the dwell sequence, which can effectively avoid that situation. The algorithm is implemented and tested in the simulation environment. It is verified that the algorithm is effective through the test results.
Keywords: passive phased array; search and scheduling; beam dwell; random sequence
0 引 言
被動雷達由于其作用距離遠、隱蔽性好等優點發展迅速,而相控陣技術的多波束、多功能性、靈活性、高數據率等特點逐漸應用到被動雷達的設計和研制中。[1]監視空域的搜索是相控陣雷達系統的主要執行任務之一,也是相控陣雷達系統其他功能運作的基礎。相控陣雷達系統可以按照所承擔的任務要求以及環境目標特性設計出多種不同的監視空域樣式。[2]因此,設計合理的搜索調度算法,保證波束駐留能完成對搜索監視空域的有效覆蓋與探測,對被動相控陣雷達至關重要。
現大多數研究主要針對主動搜索或者多任務的自適應調度,例如文獻[3]提出了一種基于發射脈沖交錯的波束駐留算法,文獻[4]提出一種基于采樣周期最大公約數分區的任務實時交叉調度算法,文獻[5]提出一種基于目標威脅度的相控陣雷達自適應調度方法等等。這些研究對多任務調度提供了很大的參考,但缺乏針對被動探測特別是被動搜索波束調度算法的研究。
本文從被動相控陣雷達波束駐留特點出發,針對平面相控陣雷達空域覆蓋范圍,以及搜索任務的方位覆蓋請求,在駐留時間內計算區域交疊情況,完成單次多波束搜索駐留。對當前所有搜索區任務按上述方法進行迭代,完成被動相控陣雷達的搜索調度。搜索區任務需多次駐留時,駐留順序使用隨機數進行控制,避免輻射源旋轉周期與駐留周期相同導致目標無法截獲。通過算法的仿真測試驗證了算法的有效性。
1 搜索調度算法設計
搜索任務調度設計主要包括任務參數設計、搜索空域劃分、搜索波位編排和波束駐留算法。其中任務參數設計、搜索空域劃分、搜索波位編排等內容受被動雷達參數和雷達探測指標等因素的影響,可參考文獻[2]、[6-7]中相關內容進行設計。本文以對海被動相控陣雷達為基礎,對搜索參數進行假設,然后對波束駐留算法進行研究。
具體搜索參數設計如下:
(1) 搜索任務參數:駐留時間50 ms,頻率范圍1~2 GHz(范圍內可任意設置),方位范圍0°~360°(范圍內可任意設置),帶寬100 MHz;
(2) 搜索空域:對海探測,仰角水平0°,方位覆蓋0°~360°;
(3) 搜索波位編排:平面相控陣天線,面陣坐標覆蓋-45°~45°,采用3 dB交疊進行方位覆蓋。頻率通道帶寬為100 MHz,使用帶寬內中心頻點計算波寬,例如:1~1.1 GHz對應頻點1.05 GHz。中心波束指向面陣法線,由法線向面陣邊緣依次編排波束,形成搜索波位表。
1.1 空域交疊模型
本文算法主要考慮方位空域交疊,所有方位對應一個俯仰。空域交疊情況使用大地坐標方位進行設計。由于波位編排及波束控制信號的產生均使用面陣坐標方位,因此需進行坐標變化,具體變換方法可參考文獻[8]。
為方便對模型進行描述,作以下定義,其中方位均為大地坐標方位:
? S:搜索任務起始方位;
? E:搜索任務結束方位;
? A:面陣中第一個波束的起始方位;
? B:面陣中最后一個波束的結束方位。
S和E為搜索區任務的起始和結束方位,A和B為面陣覆蓋空域范圍的起始和結束,示意圖如圖2所示。
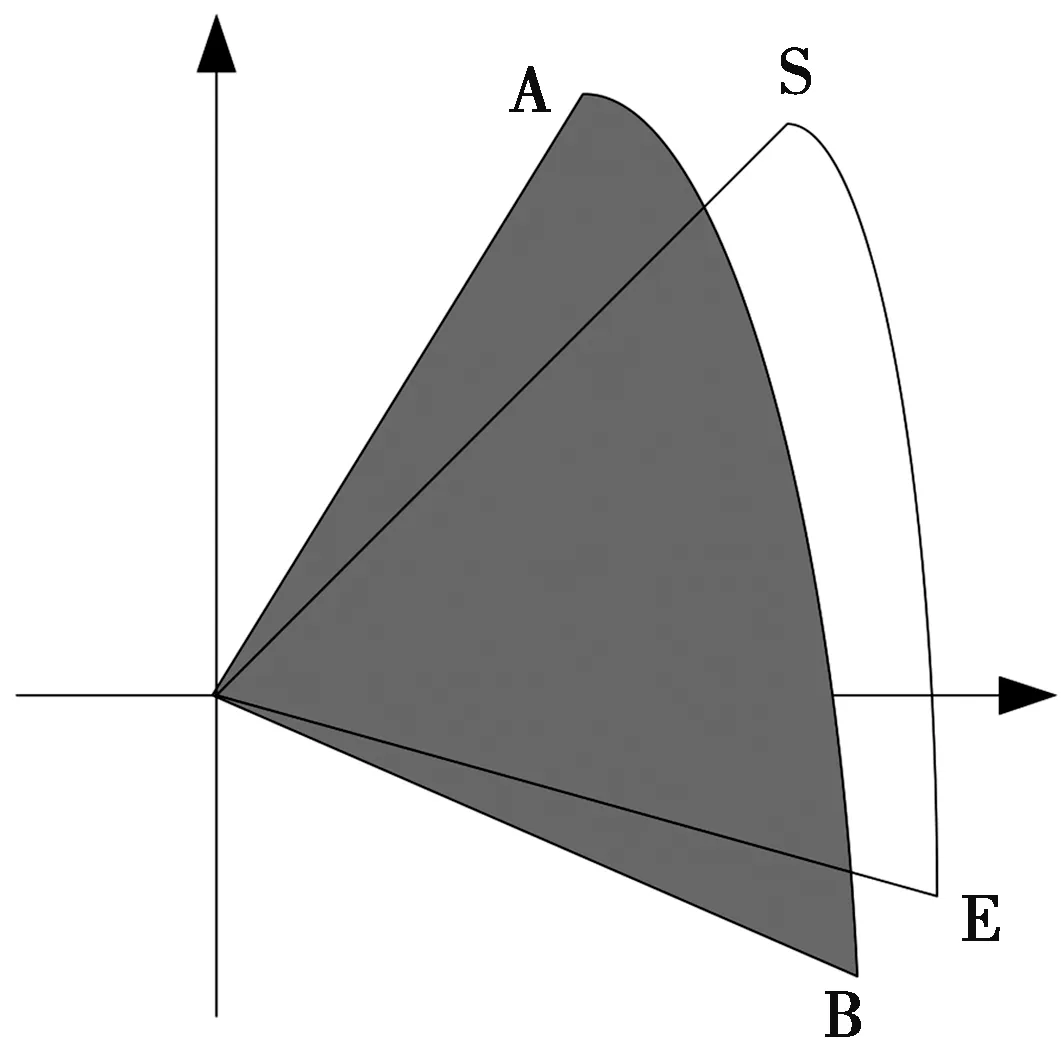
圖1 面陣范圍與搜索區范圍交疊情況
根據S、E、A、B的相對關系,搜索區S~E與面陣覆蓋范圍A~B有不同的交疊情況,對應需要不同的波束駐留方法,如圖1所示。
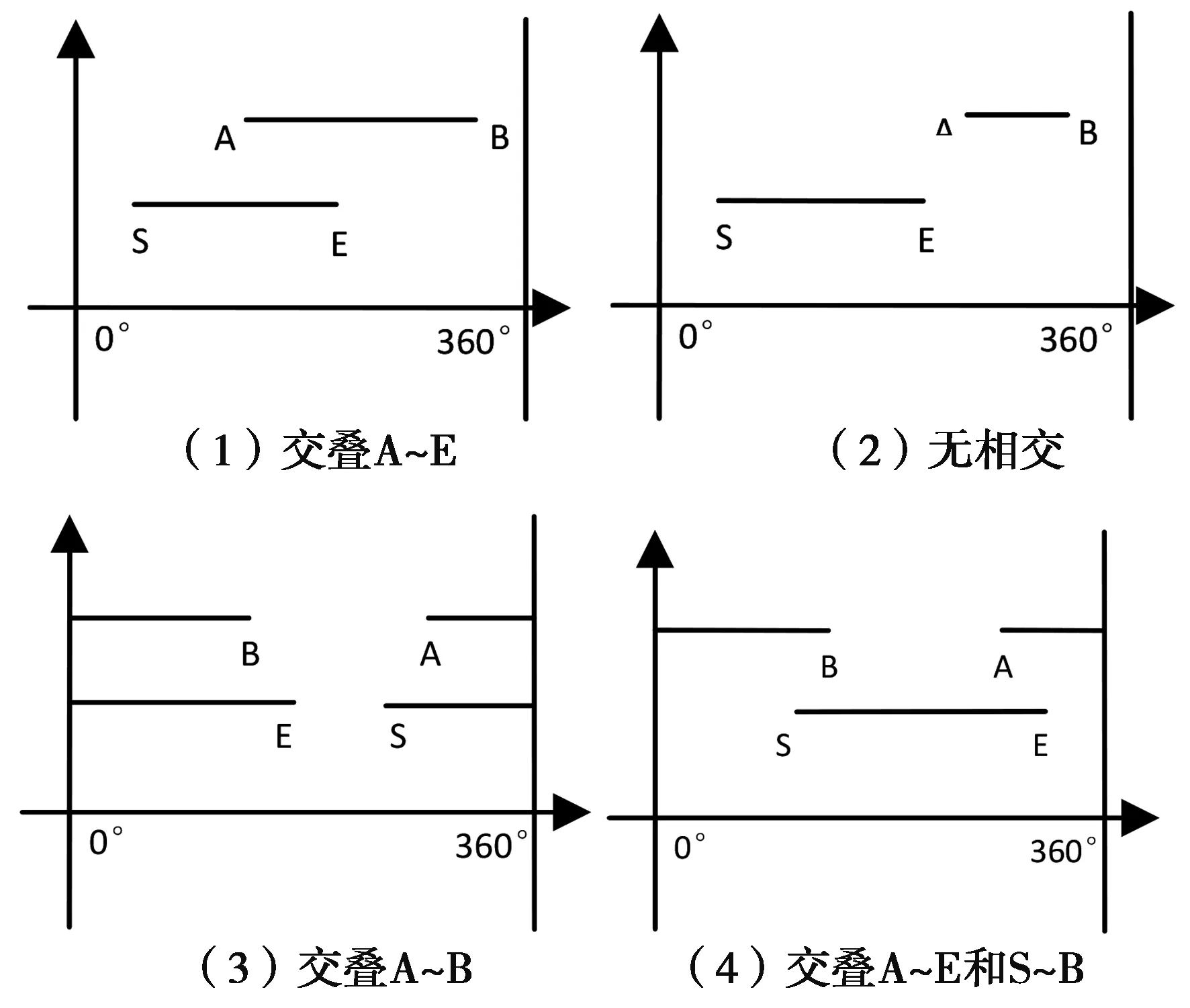
圖2 交疊情況示例
由排列組合公式:A(4,4) = 4*3*2=24,共24種情況,歸納如表1所示。
1.2 區域邊界計算
對于上節中的交疊模型,首先找出交疊邊界在波位表中的位置,然后根據起始和結束位置的波束號完成搜索波束駐留。其中邊界A和B分別對應波位表的第1個和最后1個波束,邊界S和E計算方法分為3種情況,如圖3所示。
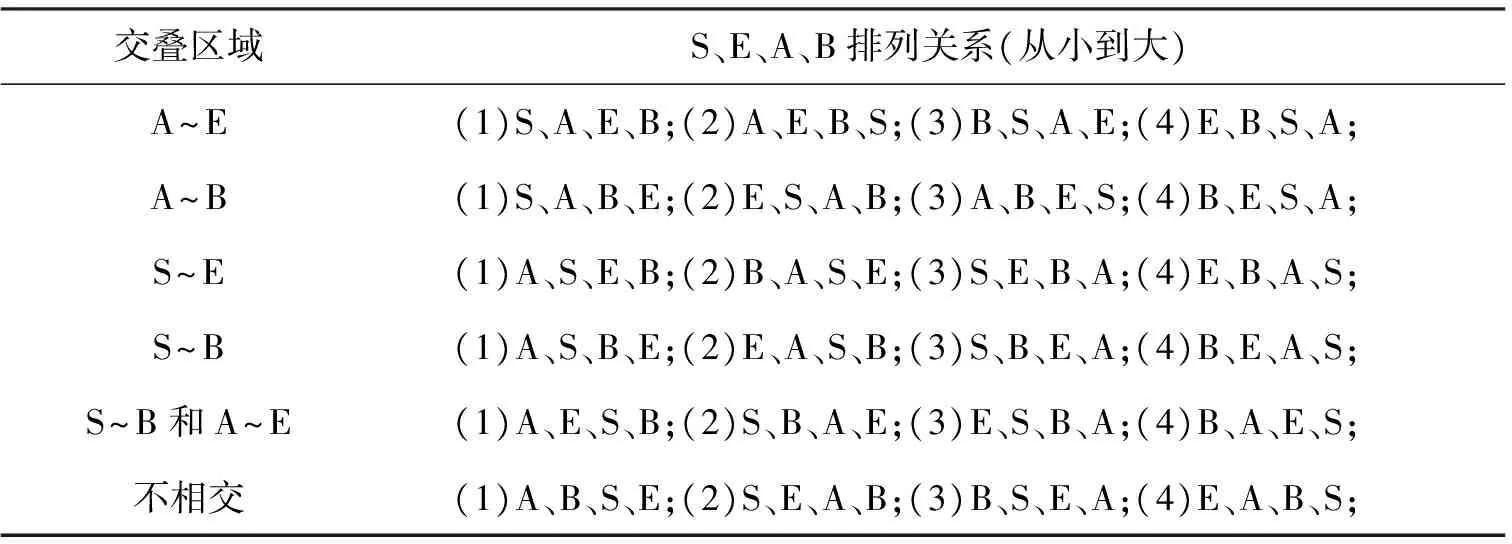
表1 區域交疊情況歸納

圖3 邊界情況分類
圖3中,E為交疊區邊界,同理S作為邊界時與E的情況相同,不再贅述。
為描述計算方法,作以下定義:
? beamLocal:邊界的波束位置;
? Index:安排波束時的波束索引;
? MaxCount:相應頻率波位表包含的波束數;
? StartAzi [Index]:波位表中第Index波束的起始方位;
? EndAzi [Index]:波位表中第Index波束的結束方位。
邊界計算方法包括以下3種:
(1) 邊界算法1:初始化Index = 0,while(Index <= MaxCount), Index ++,判斷E< EndAzi [Index]時,停止循環,此時的Index即為所求邊界波束索引;
(2) 邊界算法2:初始化Index = MaxCount,while( beamBound>0),Index --,判斷E< StartAzi [Index]或者StartAzi [Index]> EndAzi [Index]時,停止循環,此時的Index即為所求邊界波束索引;
(3) 邊界算法3:初始化Index = 0,while(Index <= MaxCount), Index ++,判斷E< EndAzi [Index]或者StartAzi [Index]> EndAzi [Index],停止循環,此時的Index即為所求邊界波束索引。
1.3 隨機序列生成
被動雷達搜索過程中,由于探測的目標雷達旋轉,當波束駐留周期與旋轉周期相同時,可能導致目標無法截獲、重要目標丟失。為了避免這種巧合,本文使用隨機序列改變駐留順序,使算法更加合理。
當系統設置多個搜索區任務或單個搜索區任務跨多個頻率通道時,先將搜索區任務按頻率通道拆分成多個子任務,然后按區域交疊算法對其中的單個子任務進行調度。
使用兩個隨機序列增加搜索的隨機性,其中隨機序列1用于控制所有子任務的搜索順序,隨機序列2用于控制單個子任務的波束駐留順序:
? 隨機序列1:根據搜索任務隊列中子任務的個數,假設為n,對1~n進行隨機排序,得到隨機序列1,按該序列取對應子任務進行波束駐留;
? 隨機序列2:根據搜索任務隊列中子任務的個數,假設為n,生成一個長度為n的隨機序列2,序列中每一個數均為0或1,隨機產生,0表示子任務從右邊界開始搜索駐留,1表示子任務從左邊界開始搜索駐留。
2 算法實現
算法實現時建立兩個任務:搜索申請接收任務和搜索申請調度任務。任務間通信采用共享內存。調試機模擬顯控發送搜索區任務,并使用看門狗定時器定時釋放信號量控制調度時間片,驅動任務的執行。算法實現流程如圖3所示。
3 測試結果及分析
測試場景1:假設單次最多8波束駐留,面陣覆蓋范圍90°,調整面陣法線的大地坐標方位,并設置多個搜索區,使其滿足表2中的所有交疊情況,對算法進行驗證。測試輸入如表2所示。

圖4 算法實現流程
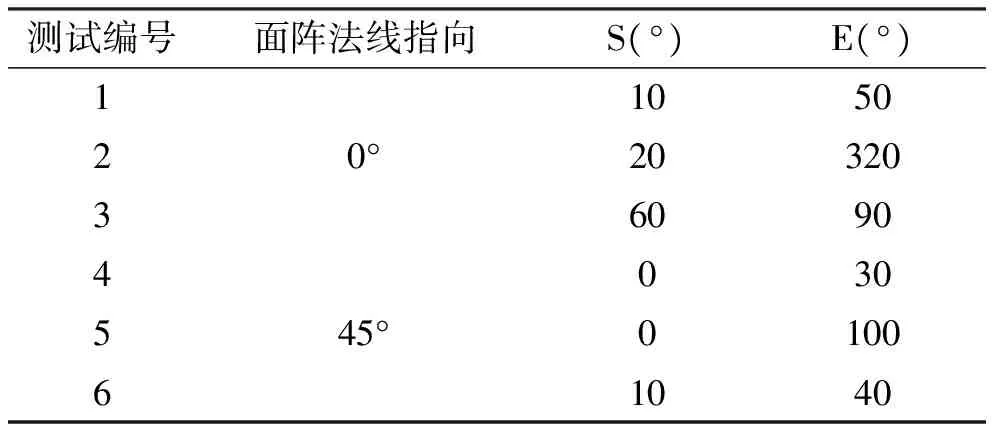
測試編號面陣法線指向S(°)E(°)1230°105020320609045645°03001001040
表2中,S為搜索區起始方位,E為搜索區結束方位。面陣法線為0°時面陣覆蓋大地坐標315°~45°,面陣法線為45°時面陣覆蓋大地坐標0°~90°。設計的測試用例滿足表2中6類交疊情況。通過采集調度輸出,查看搜索波束駐留情況,測試結果如表3所示。
測試結果表明,算法完成了面陣與搜索區交疊方位的全覆蓋,驗證了算法在各交疊情況的有效性。
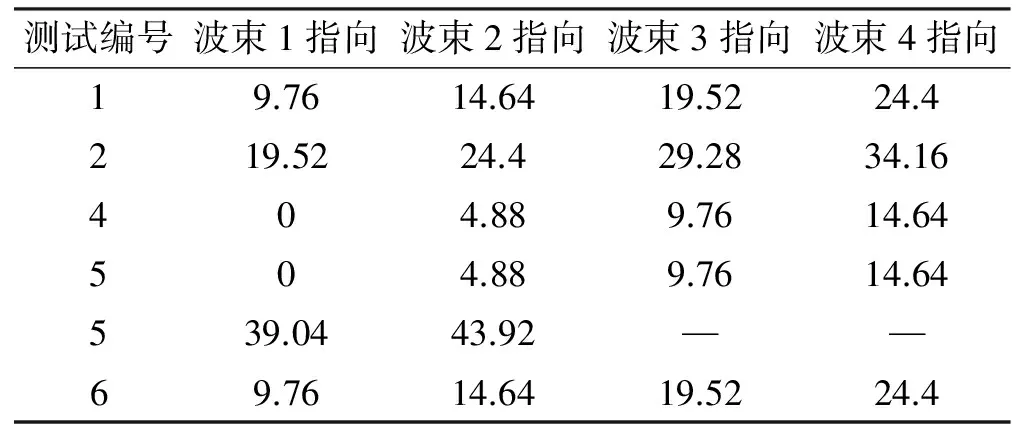
表3 場景1測試結果

表3(續)
測試場景2:假設單次最多8波束駐留,在測試頻率下波寬為4.88°,8波束可覆蓋39.04°;面陣法線指向45°,即面陣覆蓋范圍為0°~90°。設置多個與面陣交疊的搜索區,驗證駐留順序的隨機性。測試輸入如表4所示。

表4 測試場景2輸入參數
表4中,S為搜索區起始方位,E為搜索區結束方位。設置的搜索區均需兩次駐留,采集調度輸出,并使用matlab進行分析。搜索區1第1次駐留表示為1.1,第2次駐留表示為1.2。類似,搜索區6第1次駐留表示為6.1,第2次駐留表示為6.2。畫出200次駐留的散點圖,測試結果如圖5所示。圖中,橫坐標為駐留序號,縱坐標為搜索區的駐留情況。圖(a)、圖(b)分別對應兩次搜索調度運行結果數據。

圖5 駐留順序測試結果
由單個圖可看出,駐留順序無規律,是隨機的;兩個圖對比,標注出的點駐留波束也是隨機的。測試結果表明,各搜索區的波束駐留順序滿足隨機駐留的要求。
4 結束語
在被動相控陣雷達中,多波束、寬覆蓋應用廣泛。本文設計了一種基于區域交疊的搜索調度算法,通過設置不同搜索區,可以靈活地覆蓋指定空域,并增加了波束駐留順序的隨機性。通過測試驗證了算法能夠滿足被動相控陣雷達的搜索波束駐留需求。本文設計的算法可為被動相控陣搜索調度提供參考。
[1] 唐永年.雷達對抗工程[M]. 北京:北京航空航天大學出版社,2012.6.
[2] 畢增軍,等.相控陣雷達資源管理技術[M]. 北京:國防工業出版社,2016.8.
[3] 程婷,等.一種數字陣列雷達自適應波束駐留調度算法[J].電子學報,2009(9).
[4] 葉朝謀,等.基于周期分區的相控陣雷達任務交叉調度研究[J]. 電子與信息學報,2014(2).
[5] 張浩為,等. 基于目標威脅度的相控陣雷達自適應調度方法[J].火力與指揮控制,2016(6).
[6] 張光義,等. 相控陣雷達技術[M]. 北京:電子工業出版社,2010.8.
[7] 謝俞秋.等.被動相控陣雷達自適應調度算法研究[J].計算機仿真,2013,7(7).
[8] 曹正才.艦載雷達常用穩定方式坐標變換[J].雷達與對抗,2010(1).
Study on a search and scheduling algorithm of passive phased array radars
HUANGFU Yi-jiang1, YANG Yu-liang2, ZHAO Hai-dong2, JIANG Wei-wei2
(1.Information System Bureau, Naval Equipment Department, Beijing 100841; 2. No.724 Research Institute of CSIC, Nanjing 211153)
TN958.52
A
1009-0401(2017)03-0001-04
2017-08-10;
2017-08-22
皇甫一江(1980-),男,技術九級,碩士,研究方向:雷達光電技術;楊玉亮(1987-),工程師,碩士,雷達資源調度;江偉偉(1984-),工程師,碩士,雷達數據處理;趙海東(1992-),助理工程師,碩士,雷達資源調度。