基于無人機傾斜攝影測量技術(shù)的三維建模
2017-10-10 08:53:48郭楷文劉戀曹成蓉賴飛龍
科學(xué)家 2016年14期
關(guān)鍵詞:無人機
郭楷文 劉戀 曹成蓉 賴飛龍


摘要 無人機傾斜攝影測量技術(shù)作為一種新興的技術(shù)方法,在三維建模和工程測量中有廣泛的前景。本文主要介紹了無人機低空遙感處理流程和無人機低空傾斜攝影測量系統(tǒng)的主要操作流程,通過本文可以快速地了解無人機傾斜攝影測量的技術(shù)。
關(guān)鍵詞 無人機;傾斜攝影測量技術(shù);三維建模
中圖分類號 TP2 文獻標(biāo)識碼 A 文章編號 2095-6363(2016)14-0060-02
傾斜攝影技術(shù)是近年來測繪領(lǐng)域發(fā)展起來的一項新技術(shù),通過在同一飛行平臺上搭載多臺傳感器(1個垂直、4個傾斜的角度影像機),從5個不同角度同時采集信息,真實客觀地反映測量物體。目前,在歐美等發(fā)達國家該技術(shù)已經(jīng)廣泛應(yīng)用于城市管理、國土安全、考古等行業(yè)。
由于傾斜攝影測量技術(shù)能夠獲取地理實體的紋理細(xì)節(jié),不但豐富了影像數(shù)據(jù)源信息,同時高冗余度的航攝影像重疊,為高精度的影像匹配提供了條件,使得基于人工智能的三維實體重建成為了可能。傾斜攝影測量和建模的關(guān)鍵支撐點——分層顯示技術(shù)和紋理映射技術(shù),極大地提升了三維建模的效率,同時也降低建模的生產(chǎn)成本。
無人機低空遙感與航空攝影測量相比,具有影像獲取快捷、低成本、分辨率高、多視角、時效性強等優(yōu)勢。傾斜攝影測量技術(shù)作為無人機攝影測量中最廣為應(yīng)用的技術(shù),能夠以高清晰、高精度的方式來全面感知復(fù)雜場景。借助高效率的攝影采集設(shè)備和高精度的數(shù)據(jù)處理方式,能夠以真實的效果和測繪級精度反映出研究的對象的外觀特征、高度及位置等信息。
1無人機低空遙感處理流程
1.1影像的獲取
1)飛行前準(zhǔn)備工作。利用Google Earth設(shè)定一個區(qū)域并保存為KMZ格式文件,飛行作業(yè)人員打開Google Earth將KMZ文件直接導(dǎo)入,即可獲得指定飛行區(qū)域。航飛作業(yè)有兩種情況,一種是無需控制點(可直接在指定區(qū)域進行航線規(guī)劃);一種是需要控制點(需要在指定區(qū)域內(nèi),均勻布置控制點)。
2)對目標(biāo)區(qū)域進行參數(shù)設(shè)置和航線規(guī)劃。根據(jù)選定的區(qū)域,進行系統(tǒng)參數(shù)設(shè)定,然后自動地進行航線規(guī)劃。
3)飛行過程的操作。起飛前,將飛機與地面站利用電臺進行聯(lián)調(diào),將之前規(guī)劃的航線上傳至飛機,開始攝影直至整個區(qū)域完成攝影。
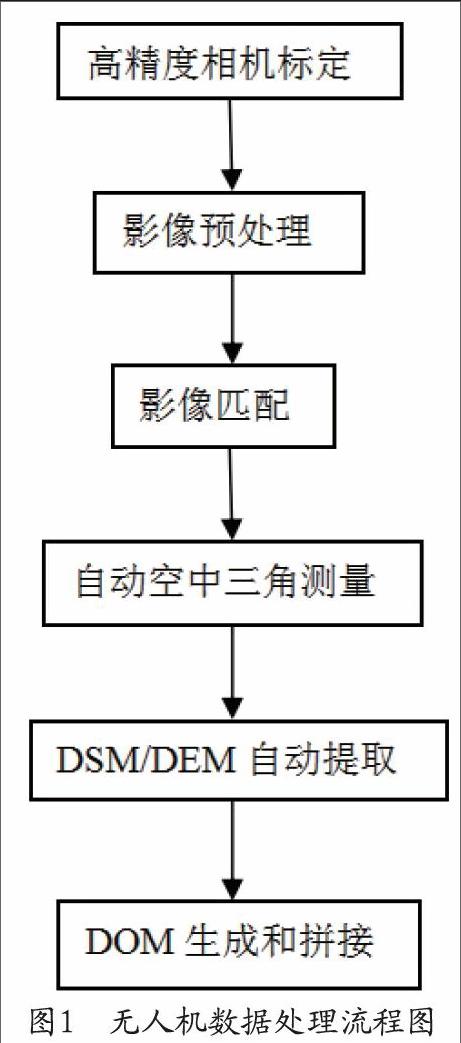
1.2數(shù)據(jù)處理
數(shù)據(jù)處理包括影像的預(yù)處理、相機高精度檢測、影像匹配、自動空中三角測量、DSM/DEM的自動提取、DOM的生成與無縫拼接等技術(shù)。數(shù)據(jù)處理流程圖如圖1所示。
2無人機低空傾斜攝影測量系統(tǒng)
無人機低空傾斜攝影系統(tǒng)由傾斜攝影軟件和影像處理軟件組成。
傾斜攝影系統(tǒng)由飛行平臺、工作人員和儀器3部分組成。獲得數(shù)據(jù)之后,還需要現(xiàn)場對獲取的影像進行逐一檢查。不合格的測區(qū)需要補飛,直至拍攝的影像能夠滿足質(zhì)量要求。在檢查完成之后,還要對影像進行數(shù)據(jù)處理,這也涉及到一些關(guān)鍵技術(shù),如圖2所示。
由于傾斜攝影測量數(shù)據(jù)處理復(fù)雜,本次3D建模實驗使用的3D建模系統(tǒng)為Smart3D-CaptureTM系統(tǒng)軟件。利用Smart3DCaptureTM建立3D模型如圖3所示。
3結(jié)論
我國目前基于傾斜攝影測量的應(yīng)用成果還較少,因此,還需要逐步深入挖掘更多應(yīng)用創(chuàng)新點。同時,我們不能局限于傾斜攝影測量技術(shù),還需要研究其與雷達、高分辨率、高光譜等傳感器的結(jié)合,研究如何把上述傳感器集成到更小的無人機上。本文主要介紹了無人機低空遙感處理流程和無人機低空傾斜攝影測量系統(tǒng)的主要操作流程,通過本文可以快速地了解無人機傾斜攝影測量的技術(shù)。讓更多的人了解此技術(shù),加快我國無人機傾斜攝影測量技術(shù)不斷前進的步伐。endprint
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(2016年9期)2016-05-26 20:58:26
