小型圓捆機捆草-卸捆自動操縱與報警裝置研究
2017-10-11 01:34:07尹建軍吳啟斌陳永河王新新
農業機械學報 2017年9期
尹建軍 吳啟斌 陳永河 王新新
(江蘇大學現代農業裝備與技術教育部重點實驗室, 鎮江 212013)
小型圓捆機捆草-卸捆自動操縱與報警裝置研究
尹建軍 吳啟斌 陳永河 王新新
(江蘇大學現代農業裝備與技術教育部重點實驗室, 鎮江 212013)
針對小型圓捆機捆草與卸捆過程依賴機手頻繁回頭觀察并手動操縱的問題,設計了由行程開關、單片機、電動缸操縱機構和蜂鳴器組成的捆草-卸捆自動操縱與報警裝置。通過分析捆草與卸捆工作過程,采用3個行程開關分別感知成捆室滿倉、草捆捆扎結束和草捆落地,設計了捆草-卸捆控制流程,確定了控制系統的捆扎時間、卸捆時間等控制參數。室內工況模擬試驗表明單片機能處理行程開關的觸發信號,使電動缸伸縮實現液壓閥手柄自動操作卸捆,蜂鳴器在捆草-卸捆過程發出不同節奏的報警提示音,并有效感知行程開關誤觸發和器件故障,提高了系統可靠性。樣機的秸稈撿拾打捆試驗表明,該裝置可提高小型圓捆機作業效率22.5%~32.2%,捆草-卸捆成功率100%。
小型圓捆機; 捆草; 報警裝置
引言
小型圓捆機特別適合我國南方小田塊秸稈收集,普遍應用麻繩纏繞式草捆捆扎和卸捆工藝。但是,現有小型圓捆機的草捆捆扎和卸捆過程自動化程度低,作業過程中需要機手頻繁回頭觀察草捆是否滿倉、捆扎是否結束、草捆是否滯留成捆室等。卸捆過程中,需要機手扳動液壓閥操作手柄打開成捆室后倉完成卸捆。頻繁回頭和手動操作增加了機手的工作強度,增加了停車時間,降低了小型圓捆機的作業效率。
目前,國外對圓捆機相關技術的研究主要集中在纏網式圓捆機設計、捆扎損失等作業效果評估等方面[1-3]。國內學者對圓捆機的研究主要集中在中型圓捆機絲網纏繞裝置設計[4-5]、作業過程控制系統設計與試驗[6-8]、成型室等關鍵部件結構設計與卷捆機理分析[9-14]、不同種類秸稈卷捆過程的應力松弛[15]、流變行為[16]和秸稈摩擦因數[17]試驗研究等方面。但是,對于小型圓捆機設計與試驗研究較少[18],沒有涉及小型圓捆機作業過程控制自動化研究。
本文通過分析小型圓捆機捆草與卸捆的工作原理,設計捆草-卸捆自動操縱與報警裝置,并進行工況模擬試驗和樣機試驗,為小型圓捆機捆草和卸捆自動化水平的提升提供技術支撐。
1 捆草與卸捆工作原理分析
1.1 捆草過程分析
如圖1所示,拖拉機輸出動力給9JYD-50型圓捆機,作業速度2~5 km/h,撿拾器不斷將秸稈撿起并喂入到成捆室中,撿拾器寬度70 cm。秸稈在旋轉鋼輥摩擦力作用下,以纏繞的形式逐漸形成草芯。隨著秸稈不斷喂入,草捆直徑逐漸增大,并且形成外緊內松的圓草捆,當成捆室內圓草捆通過鋼輥作用于后倉上的合力與液壓缸推力達到平衡時,可視為草捆滿倉,滿倉時草捆的直徑為50 cm。草捆密度由液壓系統溢流閥設定的工作壓力決定。預先引入成捆室前倉的麻繩受到草捆摩擦力作用隨著草捆旋轉而纏繞在草捆上,麻繩帶動繞繩輪旋轉,從而帶動曲柄旋轉,曲柄通過連桿帶動擺臂擺動,在此過程麻繩被割繩刀切斷,完成草捆捆扎。此時,機手停車并扳動液壓閥操作手柄打開成捆室后倉門完成卸捆,等待草捆落地后再松開液壓閥操作手柄。

圖1 小型圓捆機結構示意圖Fig.1 Structure diagram of minitype round baler1~12.鋼輥 13.成捆室 14.液壓缸 15.麻繩 16.擺臂 17.曲柄 18.繞繩輪 19.液壓閥操作手柄 20.減速器 21.撿拾器 22.彈齒 23.成捆室喂入口 24.車輪
為了感知草捆滿倉,對割繩驅動機構進行運動分析,如圖2所示。割繩驅動機構為一曲柄搖桿機構[16],當曲柄旋轉時,表示成捆室滿倉,草捆達到設定密度,開始纏繞式捆草。擺臂從初始位置CD順時針快速擺動到水平極限位置CD1,擺臂的擺動軌跡為扇形CDD1,可在此區域內安裝接觸式行程開關,獲取擺臂觸發的行程開關開閉信號,從而感知草捆滿倉。
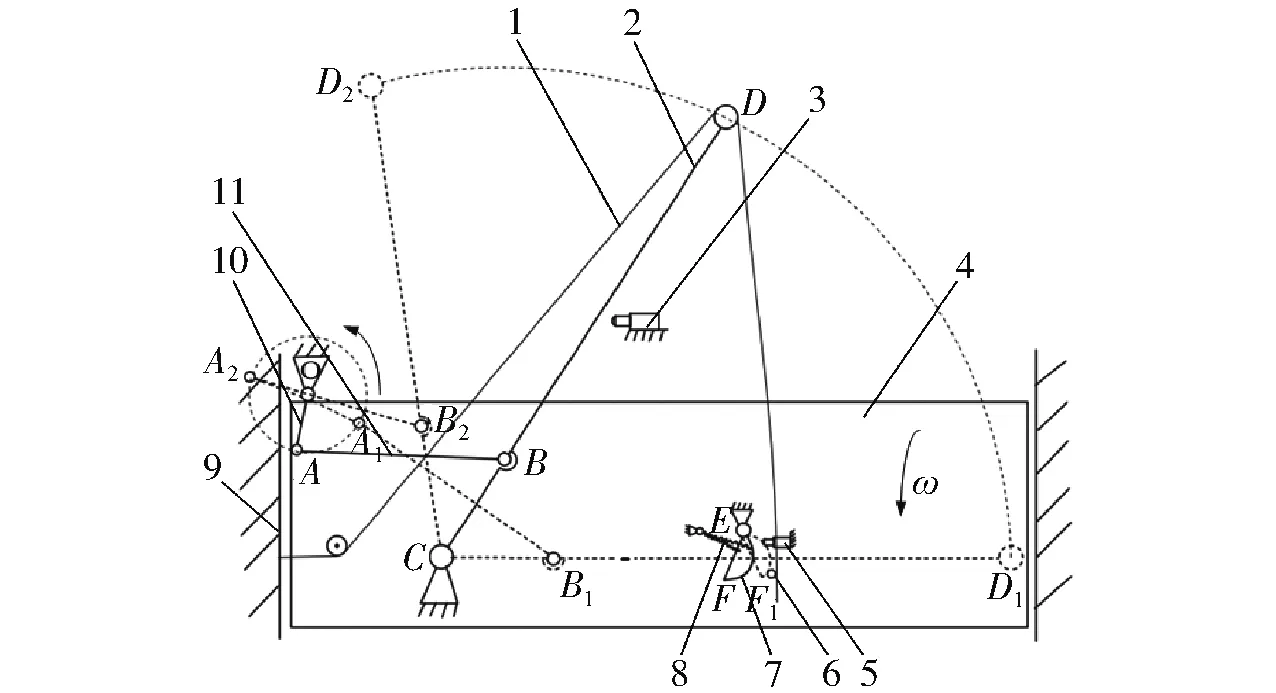
圖2 割繩驅動機構運動與行程開關安裝示意圖Fig.2 Sketch of motion of rope-cutting driving mechanism and stroke switch installation1.麻繩 2.擺臂 3.行程開關 Ⅰ 4.草捆 5.行程開關 Ⅱ 6.限位塊 7.割繩刀 8.拉簧 9.成捆室側壁 10.曲柄 11.連桿

根據上述捆草過程分析,行程開關Ⅰ安裝在擺臂擺動軌跡的中部,用來感知成捆室滿倉。行程開關Ⅱ安裝在割繩刀擺動右極限位置的限位塊前側,用來感知草捆捆扎結束。
當成捆室內草捆達到滿倉后,麻繩在草捆旋轉和擺臂擺動的作用下以曲線的形式將草捆捆扎。捆扎草捆的時間可以通過草捆旋轉的速度與麻繩捆扎的圈數確定。
草捆與鋼輥的運動關系滿足
ωr=ω1r1
(1)
式中ω——草捆旋轉角速度r——草捆半徑ω1——鋼輥旋轉角速度r1——鋼輥半徑
捆扎過程中,保持拖拉機動力輸出穩定,鋼輥勻速轉動,在摩擦力作用下使草捆在成捆室內轉動,捆草時間tk可表示為

(2)
式中m——麻繩纏繞草捆的總圈數n1——鋼輥轉速
實測9JYD-50型圓捆機麻繩纏繞草捆8圈完成捆扎,鋼輥轉速n1=180 r/min,鋼輥半徑r1=75 mm。成捆室滿倉時,草捆的半徑r=0.25 m,由式(2)可得捆扎草捆的時間tk=8.9 s,該值為圓草捆勻速轉動情況下的理論計算值。
1.2 卸捆過程分析
草捆捆扎結束后,機手扳動液壓缸控制手柄,油缸回縮,成捆室后倉門打開,草捆在鋼輥的驅動和自身重力下沿落捆緩沖架落地,此時落捆緩沖架繞轉軸鉸接處向下擺動,如圖3所示。
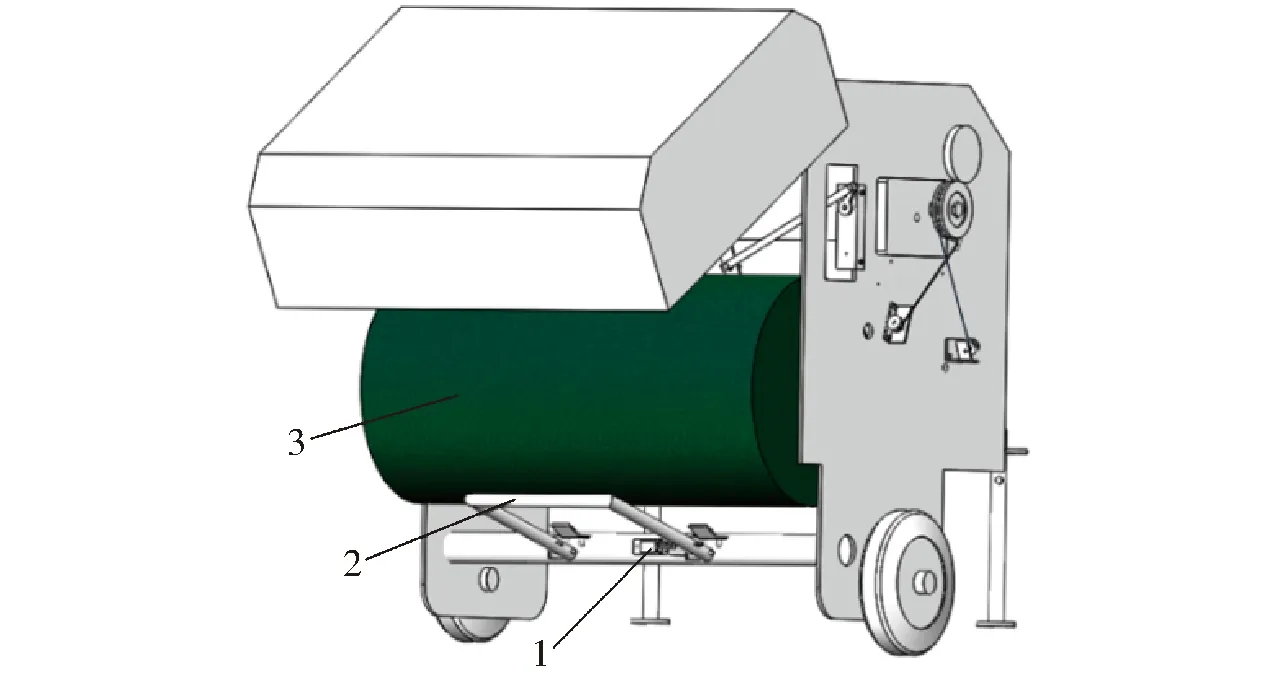
圖3 卸捆過程及行程開關安裝示意圖Fig.3 Structure diagram of unloading process and stroke switch installation1.行程開關Ⅲ 2.落捆緩沖架 3.草捆
為了及時感知草捆沿落捆緩沖架落地而未滯留在成捆室內,可以在落捆緩沖架向下擺動的軌跡上安裝接觸式行程開關Ⅲ,由落捆緩沖架的長臂觸發行程開關的開閉信號。
在后倉門逐步打開的過程中,鋼輥對草捆的驅動作用逐漸減弱直到停止,加上草捆與成捆室側壁的摩擦作用,使得草捆在后倉門開啟的過程中旋轉速度逐漸減小,當后倉門完全打開后,草捆的旋轉速度近似為零。草捆在自身的重力作用下沿落捆緩沖架落地。為分析方便,沿落捆緩沖架方向的初速度設為零,如圖4所示,由于落捆緩沖架長度L相對于草捆直徑D略大,且草捆屬于粘彈性物料,在重力作用下與硬質金屬的落捆緩沖架接觸時有較大變形,因此為分析方便忽略草捆沿落捆緩沖架下落過程的滾動摩擦,視其為滑動下落過程。

圖4 卸捆過程分析Fig.4 Analysis of bale-unloading process
由圖4的草捆受力分析,草捆沿落捆緩沖架方向所受合力可表示為
Ft=G1-Ff=Mgsinα-μFN=Ma
(3)
式中G1——草捆所受重力沿草捆緩沖架方向分力M——草捆質量α——落捆緩沖架與地面夾角Ff——草捆滑動摩擦力μ——草捆與落捆緩沖架的摩擦因數FN——落捆緩沖架對草捆的正壓力
由式(3)得草捆沿落捆緩沖架下落的加速度為

(4)
式中h——落捆緩沖架鉸接處與地面距離
由運動學公式
(5)
得到卸捆的理論時間tx為

(6)
根據9JYD-50型圓捆機技術參數,確定L=0.5 m,h=0.24 m,μ為0.45~0.55,取μ=0.5。將以上參數代入式(4)、(6),得到tx=1.6 s。
2 自動操縱與報警裝置設計
2.1 控制系統硬件組成
如圖5所示,該裝置主要由信號觸發裝置、單片機控制器、電動缸操縱機構和蜂鳴器組成。考慮滿足功能要求前提下控制系統成本,信號觸發裝置采用3個接觸式常開行程開關,選用STC89C52RC單片機作為控制器,8路數字量輸入,6路繼電器輸出,232接口、485接口可供選擇。電動缸操縱機構由12 V XTL系列直流電動缸、滑塊和液壓閥操作手柄組成,安裝在液壓缸控制手柄前方。電動缸由12 V直流鋰電池供電。蜂鳴器選用BB-116A型、120 dB音質防水抗振金屬鐵殼報警器。

圖5 控制系統構成圖Fig.5 Structure block diagram of control system
2.2 基于捆草與卸捆邏輯的控制流程設計
2.2.1正常作業過程分析
根據捆草和卸捆的工作原理,設計控制系統流程圖如圖6所示。當成捆室滿倉,擺臂擺動觸發行程開關I時,行程開關Ⅰ向控制器發出信號,控制器控制蜂鳴器連續長音鳴叫,同時檢測電動缸推桿是否完全復位,如果沒有完全復位,則強制復位。

圖6 控制系統流程圖Fig.6 Flow chart of control system
當草捆捆扎結束,麻繩被割刀割斷時,割刀擺動觸發行程開關Ⅱ,行程開關Ⅱ向控制器發出信號,控制器控制電動缸推桿推出,推桿推動滑塊,帶動液壓閥操作手柄擺動,油缸回縮,成捆室后倉門打開,卸捆開始。
當草捆沿落捆緩沖架落地,落捆緩沖架擺動觸發行程開關Ⅲ時,行程開關Ⅲ向控制器發出信號,控制器指揮電動缸的推桿復位,使液壓閥操作手柄回到初始位置,蜂鳴器停止鳴叫,完成草捆捆扎和卸捆的一個工作循環。
2.2.2系統的故障檢測
為了保證系統的可靠性,設計了故障檢測功能,蜂鳴器根據不同的故障類型發出不同鳴叫聲,便于機手判別系統狀態或者檢修。
故障檢測1:控制器從接收行程開關Ⅰ信號開始計時,到接收觸發行程開關Ⅱ信號時,記為時間T1,若T1在設定時間t1內,說明割繩刀切斷麻繩后觸發了行程開關Ⅱ,系統判定為正常作業。若T1超過設定時間t1,說明行程開關Ⅱ發生故障、割繩刀不能觸發行程開關Ⅱ或者行程開關Ⅰ被誤觸發,蜂鳴器由連續長鳴變為間隔音報警,提示機手裝置發生異常,控制器回到初始狀態,等待下次正常作業,電動缸操縱機構不動作。
故障檢測2:當行程開關Ⅰ和行程開關Ⅱ被正常觸發時,控制器從接收行程開關Ⅱ信號開始計時,到接收觸發行程開關Ⅲ信號時,記為時間T2,若T2在設定時間t2內,說明草捆沿落捆緩沖架下落,落捆緩沖架擺動觸發行程開關Ⅲ,系統判定為正常作業。若T2超過設定時間t2,說明草捆沒有落下、行程開關Ⅲ發生故障或者電動缸操縱機構發生故障。蜂鳴器由連續長鳴變為長短音報警,提示機手裝置發生異常,控制系統回到初始狀態,等待下次正常作業。
2.3 電動缸行程確定
根據小圓捆機結構特點,電動缸被固定在液壓閥操作手柄后方圓捆機牽引架上,電動缸的推桿與滑塊鉸接,滑塊套裝在液壓閥操作手柄上,如圖7所示。

圖7 電動缸操縱機構簡圖Fig.7 Sketch of operation mechanism driven by electric cylinder1.電動缸 2.液壓閥操作手柄 3.滑塊
液壓閥操作手柄擺動過程,滑塊水平位移為
lAA1=lBB1=Htanθ
(7)
式中H——電動缸安裝位置與液壓閥操作手柄底部的豎直距離
θ——液壓閥操作手柄擺動的極限角度
經測量H=185 mm,液壓閥操作手柄擺動的極限角度θ=15°,將上述參數代入式(7)中得到lBB1=49 mm。據此,電動缸的行程S確定為50 mm。
2.4設定時間t1、t2的確定
設定時間t1、t2是控制器能夠快速、有效地判斷系統正常作業或者出現故障的依據,從而準確地執行下一步動作。設定時間t1、t2是控制程序設計的關鍵參數。
設定時間t1是圓捆機正常作業時控制器判斷草捆捆扎是否結束的依據。根據設計要求設定時間t1應該大于捆草時間理論計算值,考慮到實際捆草時鋼輥轉速受拖拉機油門大小的影響會有所波動以及控制程序的故障判斷耗時,設定時間t1時增加浮動時間Δt=3 s,將捆扎草捆時間修正為Tk=tk+Δt=11.9 s,設定時間t1取整為12 s。
設定時間t2是控制器判斷草捆沿落捆緩沖架落地的依據。根據設計要求設定時間t2應該大于從割繩完成到草捆落地過程的總時間,包括電動缸伸出時間、后倉門打開時間和草捆沿落捆緩沖架下落的卸捆時間,其中卸捆時間tx=1.6 s。根據電動缸技術參數,電動缸的推桿速度為15 mm/s,所以電動缸推桿伸出時間為3.3 s。后倉門的啟閉由液壓缸活塞桿的伸縮來控制,液壓缸活塞桿完全縮回時后倉門完全打開,實測后倉門完全打開時間為2 s。因此,正常作業情況下,從割斷麻繩到草捆落地過程的總時間約為t=1.6+3.3+2=6.9 s。考慮到落捆時間計算時忽略下落初速度和下落過程滾動摩擦影響,以及控制程序的故障判斷耗時,根據試驗設定時間t2=8 s。
3 捆草-卸捆試驗
3.1 室內工況模擬試驗
按照單片機控制器電路連線要求,將3個行程開關、直流鋰電池、電動缸、蜂鳴器與單片機開發板連接,如圖8所示。按照該裝置的工作原理,模擬小型圓捆機正常作業時該裝置的工作情況,驗證是否滿足設計要求。模擬小型圓捆機和該裝置可能出現的故障:行程開關Ⅰ被誤觸發;行程開關Ⅱ發生故障;草捆未靠自重落下而停留在成捆室內;行程開關Ⅲ發生故障;電動缸操縱機構發生故障。模擬上述5種故障情況來驗證報警裝置是否給出報警提示以及電動缸能否復位。

圖8 系統構成與工況模擬試驗Fig.8 System structure and simulation tests of work condition1.鋰電池 2.電動缸 3.蜂鳴器 4.行程開關Ⅱ 5.行程開關Ⅲ 6.行程開關Ⅰ 7.單片機開發板
反復模擬上述故障,蜂鳴器能根據模擬的故障,發出不同的報警提醒聲音。在非正常操作電動缸未能完全復位的情況下,控制器工作前能夠對其進行檢測,并強制復位,滿足設計要求。
3.2 樣機試驗
將該裝置安裝到9JYD-50型小圓捆機上進行場地打捆試驗,如圖9所示。在地面上條鋪0.8 m寬、20 m長、含水率約30%的水稻秸稈,拖拉機牽引小型圓捆機對水稻秸稈進行撿拾打捆試驗,拖拉機速度為1.5~2.5 km/h。

圖9 樣機試驗過程Fig.9 Test process of prototype baler
由圖9可知,隨著拖拉機的前進,圓捆機撿拾器不停地將秸稈撿拾喂入到成捆室,草捆在成捆室內直徑不斷增大。圖9a為秸稈撿拾階段;圖9b為成捆室滿倉,擺臂擺動到水平極限位置,機手停車;圖9c為捆草結束,電動缸推桿推出;圖9d為草捆沿落捆緩沖架落地,完成一個作業循環。重復進行20次場地打捆試驗,捆草與卸捆的自動操縱與報警裝置能夠按照設計要求正常工作。記錄每次試驗小型圓捆機打一個捆的作業時間t,如表1所示。

表1 小型圓捆機打捆作業試驗結果Tab.1 Test results of baling operation of minitype round baler
20次試驗的作業時間平均值為43.4 s。原來的作業時間為56~64 s,作業效率提高了22.5%~32.2%。在20次試驗中,該裝置未出現故障,捆草-卸捆成功率100%。為了進一步考核系統的可靠性,在江蘇省海安縣隆政村對樣機系統進行田間捆扎小麥秸稈的捆草-卸捆自動操縱與報警試驗,捆草 500捆未發生行程開關損壞、電動推桿不響應等故障,報警提示音正常,捆草-卸捆成功率100%。
4 結束語
通過分析小型圓捆機捆草與卸捆工作過程,設計了由行程開關、單片機、電動缸操縱機構和蜂鳴器組成的捆草-卸捆自動操縱與報警裝置。室內工況模擬試驗表明單片機能處理行程開關的觸發信號,使電動缸伸縮實現液壓閥手柄自動操作卸捆,蜂鳴器在捆草-卸捆過程發出不同節奏的報警提示音,并有效感知行程開關誤觸發和器件故障,提高了系統可靠性。樣機的秸稈撿拾打捆試驗表明:設計的捆草-卸捆自動操縱與報警裝置可提高小型圓捆機作業效率22.5%~32.2%,捆草-卸捆成功率100%,解決了小型圓捆機捆草和卸捆過程的手動操縱問題,提高了小型圓捆機作業的自動化水平。
1 BORRENI G, BISAGLIA C, TABACCO E.Effects of a new-concept wrapping system on alfalfa round-bale silage[J].Transactions of the ASABE, 2007,50(3):781-787.
2 TAYLOR R K, BLASI D A, SHROYER J P. Storage losses in net-wrapped, large round bales of alfalfa [J].Applied Engineering in Agriculture, 1994,10(3):317-320.
3 華榮江,唐遵峰,葉宏艷,等.國內外圓捆機械研究與發展趨勢[J].中國農機化,2012,33(3): 23-26. HUA Rongjiang,TANG Zunfeng,YE Hongyan,et al.Research and development tendency about baler in domestic and overseas[J].Chinese Agricultural Mechanization,2012,33(3): 23-26.(in Chinese)
4 王德成,高東明,王光輝,等. 圓草捆自動纏網裝置及自動纏網方法:中國,102232337A[P].2011-11-09.
5 高東明,王德成,王光輝,等. 圓草捆自動纏網裝置設計與試驗[J/OL].農業機械學報,2012,43(8):99-104.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120819&flag=1. DOI:10.6041/j.issn.1000-1298.2012.08.019. GAO Dongming, WANG Decheng, WANG Guanghui, et al.Self-wrapping net mechanism for round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(8):99-104.(in Chinese)
6 叢宏斌,李汝莘.青貯玉米收獲機打捆裝置自動控制系統設計[J].農業機械學報,2009,40(11):42-45. CONG Hongbin, LI Ruxin.Design of automatic control system on baling apparatus for ensilage maize combine[J].Transactions of the Chinese Society for Agricultural Machinery,2009, 40(11): 42-45.(in Chinese)
7 任紅飛, 郭永, 張欣, 等. 基于工程機械控制器HC-G15的圓捆機電氣控制系統設計[J].內蒙古農業大學學報:自然科學版, 2012,33(3):182-185. REN Hongfei, GUO Yong, ZHANG Xin, et al. Electric controlling system design for round bundler based on construction machinery controller HC-G15 [J]. Journal of Inner Mongolia Agricultural University:Natural Science Edition, 2012,33(3):182-185. (in Chinese)
8 肖章, 劉亮東, 王光輝, 等.基于PLC的青貯圓草捆打捆機控制系統設計[J]. 中國農業大學學報, 2013, 18(6):175-179. XIAO Zhang, LIU Liangdong, WANG Guanghui, et al. Control system design of silage round baler based on PLC [J].Journal of China Agricultural University, 2013, 18(6):175-179. (in Chinese)
9 王德福, 蔣亦元, 王吉權. 鋼輥式圓捆打捆機結構改進與試驗[J]. 農業機械學報, 2010, 41(12):84-88. WANG Defu, JIANG Yiyuan, WANG Jiquan. Structure-improving and experiment of steel-roll round baler [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 84-88. (in Chinese)
10 王春光,敖恩查,邢冀輝,等. 鋼輥外卷式圓捆打捆機設計與試驗[J]. 農業機械學報,2010,41(增刊):103-106,102. WANG Chunguang, AO Encha, XING Jihui,et al.Design and experiment on round baler with revolute steel roller[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(Supp.):103-106,102. (in Chinese)
11 高東明,王德成,李杰,等. 青飼圓捆機對數螺線式成形裝置設計與試驗[J]. 農業機械學報,2015,46(7):118-122.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150718&flag=1.DOI:10.6041/j.issn.1000-1298.2015.07.018. GAO Dongming, WANG Decheng, LI Jie, et al. Design and test of logarithmic spiral round baler chamber[J].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):118-122. (in Chinese)12 杜韌,張晗,李丹.圓捆機成型室的試驗與研究[J].北華航天工業學院學報,2010,20(5):1-3. DU Ren, ZHANG Han, LI Dan.Experiment and research on forming box of wound bundler[J].Journal of North China Institute of Aerospace Engineering,2010,20(5):1-3.(in Chinese)
13 李葉龍,王德福,李東紅,等. 輥盤式圓捆機卷捆機理分析與試驗[J/OL]. 農業機械學報,2016,47(12):45-52.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161207&flag=1.DOI:10.6041/j.issn.1000-1298.2016.12.007. LI Yelong, WANG Defu, LI Donghong, et al.Theoretical analysis and experiment of baling mechanism of roll-disk round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):45-52.(in Chinese)
14 雷軍樂,王德福,李東紅,等. 鋼輥式圓捆機旋轉草芯形成影響因素分析與優化[J/OL]. 農業機械學報,2015,46(12):18-25.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151203&flag=1.DOI:10.6041/j.issn.1000-1298.2015.12.003. LEI Junle, WANG Defu, LI Donghong, et al.Influence factors and optimization of forming rotary straw core by steel-roll round baler[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(12):18-25.(in Chinese)
15 雷軍樂, 王德福, 張全超,等.完整稻稈卷壓過程應力松弛試驗[J].農業工程學報, 2015, 31(8):76-83. LEI Junle, WANG Defu, ZHANG Quanchao, et al. Experiment on stress relaxation characteristics of intact rice straw during rotary compression [J]. Transactions of the CSAE, 2015, 31(8):76-83. (in Chinese)
16 李汝莘,耿愛軍,趙何,等.碎玉米秸稈卷壓過程的流變行為試驗[J].農業工程學報, 2012, 28(18):30-35. LI Ruxin, GENG Aijun, ZHAO He, et al. Rheologic behavior of chopped corn stalks during rotary compression[J]. Transactions of the CSAE, 2012, 28(18): 30-35. (in Chinese)
17 房欣, 陳海濤, 黃振華, 等.不同含水率大豆秸稈與不同材料間滑動摩擦特性的研究[J].大豆科學,2012,31(5):838-841. FANG Xin, CHEN Haitao, HUANG Zhenhua, et al. Sliding friction characteristic of different moisture content of soybean stalk with different materials[J].Soybean Science, 2012, 31(5): 838-841. (in Chinese)
18 王琛, 黃東明, 周益君, 等. 9YY-550型小型秸稈撿拾圓捆機的設計[J].中國農機化, 2008,29(4):67-68. WANG Chen, HUANG Dongming, ZHOU Yijun, et al. Design on the model 9YY-550 mini type rotary baler for straw [J]. Chinese Agricultural Mechanization, 2008,29(4):67-68. (in Chinese)
19 任亨斌, 寧先雄.實現急回運動且傳動性能最優的機構綜合[J].機床與液壓, 2005(4): 63-64. REN Hengbin, NING Xianxiong.Optimal synthesis of four-bar linkage with both quick-return characteristics and maximum transmission angle [J]. Machine Tool & Hydraulics, 2005(4): 63-64. (in Chinese)
20 中國農業機械化科學研究院.農業機械設計手冊:下冊[M].北京: 中國農業科學技術出版社,2007.
DesignofAutomaticManipulationandAlarmingDeviceofStraw-bundlingandBale-unloadingofMinitypeRoundBaler
YIN Jianjun WU Qibin CHEN Yonghe WANG Xinxin
(KeyLaboratoryofModernAgriculturalEquipmentandTechnology,MinistryofEducation,JiangsuUniversity,Zhenjiang212013,China)
In view of the problem that the driver frequently turns round to observe and manually operate the baler during the process of straw-bundling and bale-unloading of minitype round baler, an automatic manipulation and alarming device was developed. The device mainly consisted of three travel switches as a singlechip, an operation mechanism driven by electric cylinder and a buzzer. By analyzing the working process of straw-bundling and bale-unloading, three travel switches were used to detect whether straw was filled with bale chamber, straw-bundling motion finished and the bale fell to the ground from bale chamber. The control flow of straw-bundling and bale-unloading was designed, and the control parameters of straw-bundling time and bale-unloading time were determined. Simulation tests of indoor working condition showed that the single chip could process the trigger signal of three travel switches to make electric cylinder stretch out and draw back, and the hydraulic valve handle was driven by the operation mechanism to realize automatic bale-unloading. The buzzer made different rhythm of the alarm sound during the process of straw-bundling and bale-unloading to effectively detect spurious triggering of travel switches and parts fault, which improved the reliability of the system. The pick-up and baling tests of prototype baler showed that the device may improve the working efficiency of minitype round baler by 22.5% to 32.2%, and the success rate of straw-bundling and bale-unloading may reach 100%.
minitype round baler; straw-bundling; alarming device
S225.2+2; TP391.9
A
1000-1298(2017)09-0096-06
10.6041/j.issn.1000-1298.2017.09.012
2017-01-24
2017-02-24
國家自然科學基金項目(51375215)、鎮江市重點研發計劃項目(NY2015009)和江蘇高校優勢學科建設工程項目(蘇政辦發(2014)37號)
尹建軍(1973—),男,研究員,博士,主要從事收獲機械集成設計和農業機器人技術研究,E-mail: yinjianjun@ujs.edu.cn
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
汽車維修與保養(2019年7期)2020-01-06 03:30:42
故事大王(2016年7期)2016-09-22 17:30:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39