四缸汽油發(fā)動(dòng)機(jī)點(diǎn)火正時(shí)控制策略與仿真研究
2017-10-12 02:27:36賴真良趙永鑫
關(guān)鍵詞:發(fā)動(dòng)機(jī)模型
雷 霖, 賴真良, 趙永鑫, 李 凱
(1.成都大學(xué) 信息科學(xué)與工程學(xué)院, 四川 成都 610106;2.西華大學(xué) 電氣與電子信息學(xué)院, 四川 成都 610039;3.成都茵普精密機(jī)械有限公司, 四川 成都 610500)
四缸汽油發(fā)動(dòng)機(jī)點(diǎn)火正時(shí)控制策略與仿真研究
雷 霖1,2, 賴真良1,2, 趙永鑫1, 李 凱3
(1.成都大學(xué) 信息科學(xué)與工程學(xué)院, 四川 成都 610106;2.西華大學(xué) 電氣與電子信息學(xué)院, 四川 成都 610039;3.成都茵普精密機(jī)械有限公司, 四川 成都 610500)
以某型汽油發(fā)動(dòng)機(jī)為原型機(jī),在GT-Power軟件中搭建仿真模型.仿真結(jié)果表明,仿真模型在輸出功率、力矩上與原型機(jī)誤差在3%以內(nèi).以該模型為基準(zhǔn),仿真分析點(diǎn)火提前角對(duì)輸出功率、力矩的影響,以及不同工況對(duì)發(fā)動(dòng)機(jī)輸出性能的影響.并以輸出力矩為優(yōu)化目標(biāo),以輸出力矩變化量、上一采樣時(shí)刻點(diǎn)火提前角變化量為模糊控制算法輸入,以當(dāng)前點(diǎn)火提前角變化量為模糊控制算法輸出,采用模糊控制算法尋找輸出力矩極大值點(diǎn)的點(diǎn)火提前角.采用GT-Power和Simulink聯(lián)合仿真,仿真實(shí)驗(yàn)結(jié)果表明,該控制策略修正了點(diǎn)火提前角,提高了發(fā)動(dòng)機(jī)的輸出力矩,且具有快速、穩(wěn)定、精度高的特性.
點(diǎn)火提前角;力矩;模糊控制;仿真
0 引 言
目前,汽油發(fā)動(dòng)機(jī)點(diǎn)火正時(shí)控制(開(kāi)環(huán)控制策略)多采用經(jīng)典的查表法,該表多為二維表并采用離線標(biāo)定,輸入一般為負(fù)荷大小、發(fā)動(dòng)機(jī)轉(zhuǎn)速,輸出采用插值法[1-2].但是,發(fā)動(dòng)機(jī)的點(diǎn)火提前角對(duì)溫度、負(fù)荷、轉(zhuǎn)速較為敏感,且其他因素如外界壓力、發(fā)動(dòng)機(jī)空燃比、壓縮比、發(fā)動(dòng)機(jī)散熱條件等也對(duì)點(diǎn)火提前角存在一定影響[3-4].當(dāng)發(fā)動(dòng)機(jī)工作在不同地區(qū)、不同季節(jié)以及發(fā)動(dòng)機(jī)自身磨損時(shí),發(fā)動(dòng)機(jī)離線標(biāo)定的點(diǎn)火提前角的Map已經(jīng)偏離發(fā)動(dòng)機(jī)在滿足各種約束條件下的最佳工作點(diǎn).因此,發(fā)動(dòng)機(jī)的點(diǎn)火提前角的標(biāo)定需要更多的輸入?yún)⒘浚覙?biāo)定不僅需要在實(shí)驗(yàn)室離線確定基本的Map圖(二維或多維),更需要在線修正Map圖,使發(fā)動(dòng)機(jī)工作處于性能最佳點(diǎn).基于此,本研究設(shè)計(jì)了一種在線尋找最佳點(diǎn)火提前角使發(fā)動(dòng)機(jī)輸出力矩最佳的控制策略.
1 仿真模型的搭建及各因子對(duì)發(fā)動(dòng)機(jī)性能影響分析
1.1 仿真模型的搭建
本研究以某型直列四沖程缸內(nèi)直噴汽油發(fā)動(dòng)機(jī)為原型機(jī),其參數(shù)如表1所示,以GT-Power軟件搭建仿真計(jì)算的模型[5-6],為了研究點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)的性能影響,采用EngCylCombSITurb燃燒模型來(lái)模擬缸內(nèi)燃燒過(guò)程.進(jìn)氣系統(tǒng)的離散長(zhǎng)度取缸徑的0.4倍,排氣系統(tǒng)的離散長(zhǎng)度取缸徑的0.55倍,環(huán)境參數(shù)取溫度為300 K,壓強(qiáng)為1.01 bar.系統(tǒng)的仿真模型如圖1所示.
表1某型發(fā)動(dòng)機(jī)參數(shù)
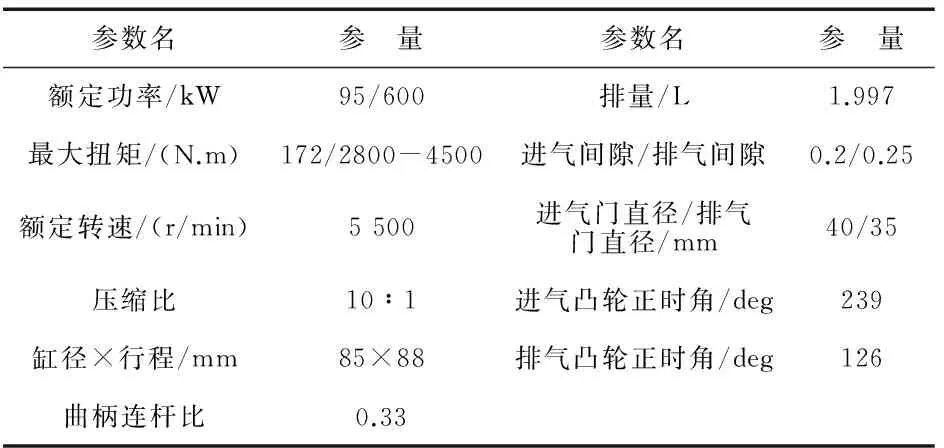
參數(shù)名參 量參數(shù)名參 量額定功率/kW95/600排量/L1.997最大扭矩/(N.m)172/2800-4500進(jìn)氣間隙/排氣間隙0.2/0.25額定轉(zhuǎn)速/(r/min)5500進(jìn)氣門(mén)直徑/排氣門(mén)直徑/mm40/35壓縮比10∶1進(jìn)氣凸輪正時(shí)角/deg239缸徑×行程/mm85×88排氣凸輪正時(shí)角/deg126曲柄連桿比0.33
在仿真模型中,將發(fā)動(dòng)機(jī)轉(zhuǎn)速設(shè)定在1 500~5 500 r/min間,每500 r/min為一個(gè)間隔,工作在全負(fù)荷下,得到仿真模型下的功率特性曲線、力矩特性曲線,并將這些仿真特性曲線和實(shí)驗(yàn)特性曲線比較,結(jié)果如圖2所示.
從圖2可知,轉(zhuǎn)矩輸出的仿真計(jì)算值與實(shí)驗(yàn)值最大誤差為2.97%,功率輸出的仿真計(jì)算值與實(shí)驗(yàn)值最大誤差為2.92%.仿真與實(shí)驗(yàn)誤差在3%以內(nèi),表明本仿真模型可行.
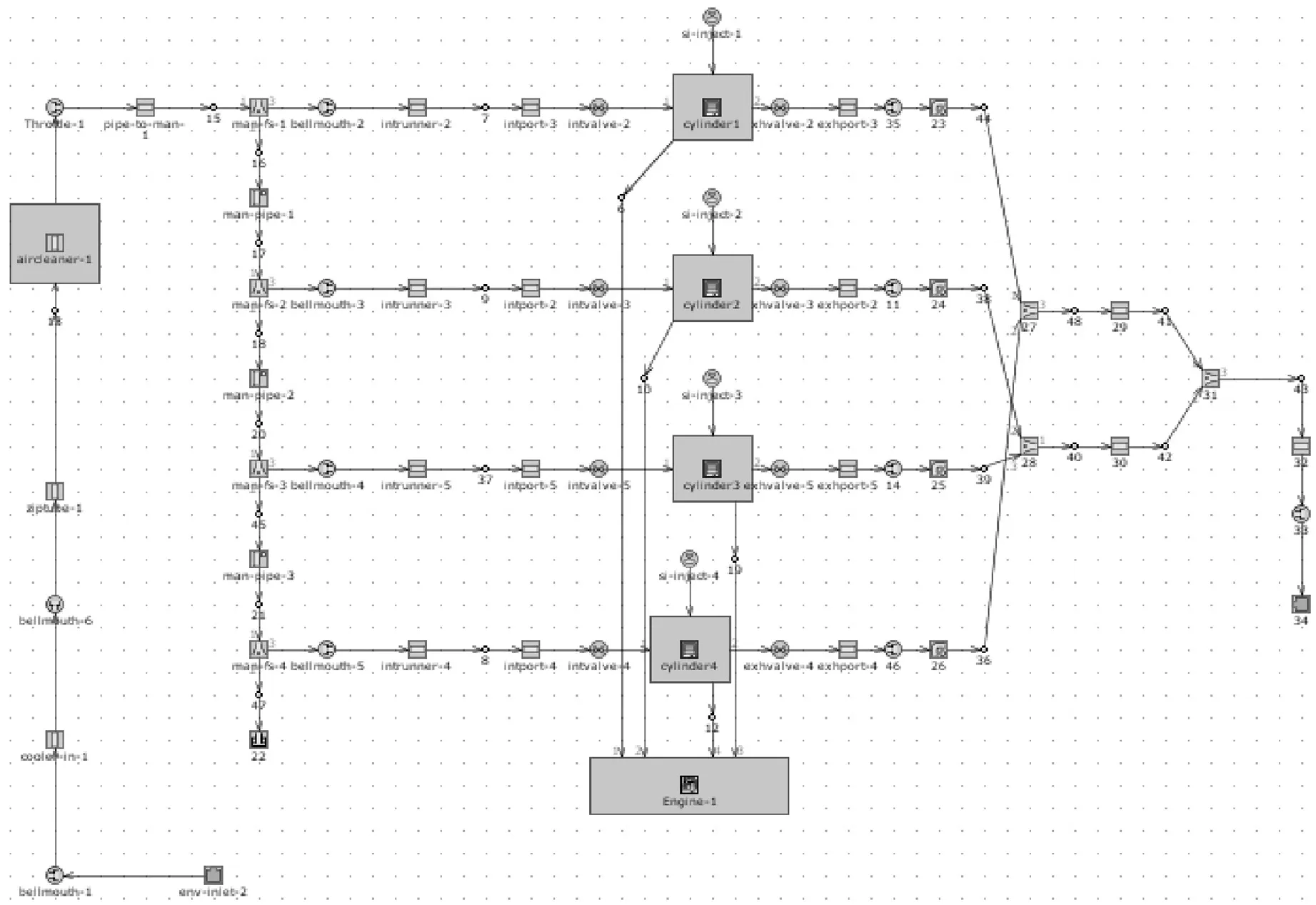
圖1發(fā)動(dòng)機(jī)仿真模型示意圖
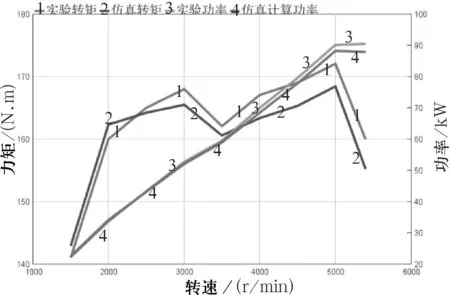
圖2仿真特性曲線與實(shí)驗(yàn)特性行曲線
1.2 各因子對(duì)發(fā)動(dòng)機(jī)性能影響分析
1.2.1 不同轉(zhuǎn)速下點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)性能影響.
保持發(fā)動(dòng)機(jī)、進(jìn)排氣系統(tǒng)其他參數(shù)不變,節(jié)氣門(mén)開(kāi)度為0.35,轉(zhuǎn)速取[1 000,6 000]r/min區(qū)間等間距6個(gè)點(diǎn)(步長(zhǎng)為1 000 r/min),點(diǎn)火提前角取[-45,0]區(qū)間等間距的46個(gè)點(diǎn)(步長(zhǎng)為1 deg),分別仿真計(jì)算不同點(diǎn)火提前角、轉(zhuǎn)速對(duì)發(fā)動(dòng)機(jī)輸出力矩的影響,結(jié)果如圖3所示.
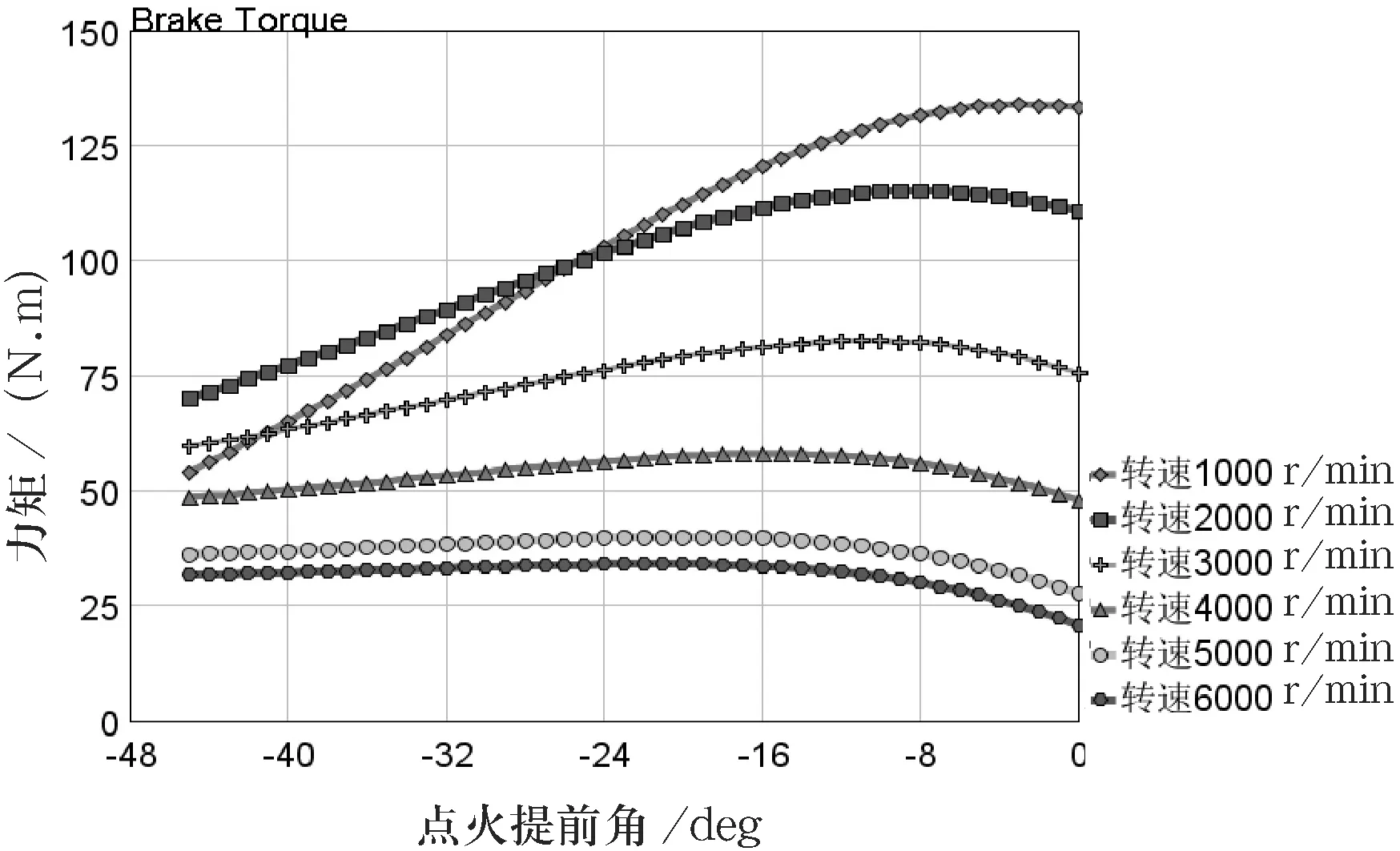
圖3轉(zhuǎn)速、點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)的性能影響
從圖3可知,在不同轉(zhuǎn)速下存在動(dòng)力性最佳的點(diǎn)火提前角,轉(zhuǎn)速1 000~6 000 r/min間等間距的6個(gè)點(diǎn)的最佳點(diǎn)火提前角分別為-3、-9、-11、-15、-20、-21 deg.隨著轉(zhuǎn)速的增加,最佳點(diǎn)火提前角的角度絕對(duì)值逐漸增大.
1.2.2 不同負(fù)荷下點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)性能影響.
保持發(fā)動(dòng)機(jī)、進(jìn)排氣系統(tǒng)其他參數(shù)不變,轉(zhuǎn)速取5 000 r/min,節(jié)氣門(mén)開(kāi)度取[0.25,0.5]區(qū)間等間距的6個(gè)點(diǎn)(步長(zhǎng)為0.05),點(diǎn)火提前角取[-90,-3]區(qū)間等間距的30個(gè)點(diǎn)(步長(zhǎng)為3 deg),分別仿真計(jì)算不同點(diǎn)火提前角、負(fù)荷對(duì)發(fā)動(dòng)機(jī)輸出力矩的影響,結(jié)果如圖4所示.
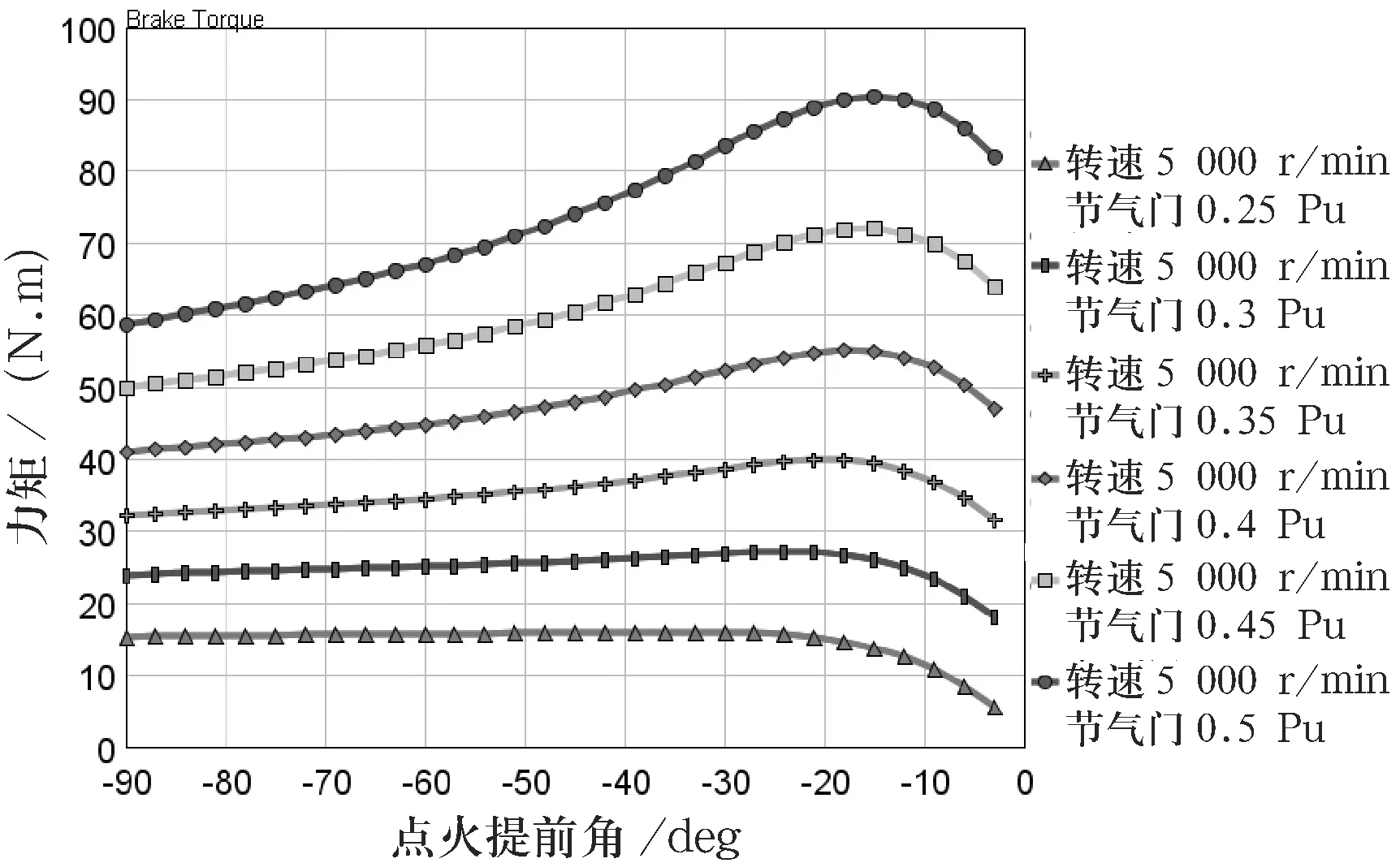
圖4負(fù)荷、點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)的性能影響
從圖4可知,在不同的負(fù)荷下也存在動(dòng)力性最佳的點(diǎn)火提前角,0.25~0.5間6個(gè)節(jié)氣門(mén)開(kāi)度點(diǎn)的最佳點(diǎn)火提前角分別為-34.5、-24、-19.5、-18、-15、-15 deg.不同的負(fù)荷下,最佳點(diǎn)火提前會(huì)發(fā)生偏移,隨著負(fù)荷增大最佳點(diǎn)火提前角向上止點(diǎn)偏移.
1.2.3 不同外界環(huán)境溫度下點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)性能影響.
保持發(fā)動(dòng)機(jī)、進(jìn)排氣系統(tǒng)其他參數(shù)不變,轉(zhuǎn)速取5 000 r/min,節(jié)氣門(mén)開(kāi)度0.5 Pu,外界環(huán)境溫度取230 K、300 K、350 K的3個(gè)點(diǎn),[-45,-3]區(qū)間等間距的22個(gè)點(diǎn)(步長(zhǎng)為2 deg),分別仿真計(jì)算不同點(diǎn)火提前角、環(huán)境溫度對(duì)發(fā)動(dòng)機(jī)輸出力矩的影響,結(jié)果如圖5所示.
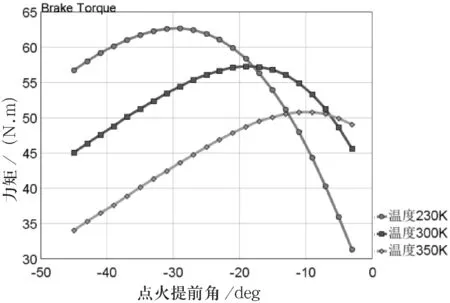
圖5環(huán)境溫度、點(diǎn)火提前角對(duì)發(fā)動(dòng)機(jī)的性能影響
從圖5可知,不同外界環(huán)境溫度下,發(fā)動(dòng)機(jī)存在動(dòng)力性最佳的點(diǎn)火提前角.3個(gè)最佳點(diǎn)火提前角分別是-29、-19、-9 deg.不同外界環(huán)境溫度下,最佳點(diǎn)火提前角會(huì)發(fā)生較大幅度的偏移,且偏移方向是隨著溫度上升向上止點(diǎn)偏移.
1.2.4 結(jié) 論.
綜上分析可知,負(fù)荷、轉(zhuǎn)速與外界環(huán)境溫度的變化都會(huì)導(dǎo)致最佳點(diǎn)火提前角發(fā)生偏移,且最佳點(diǎn)火提前角對(duì)轉(zhuǎn)速、環(huán)境溫度很敏感.此外,還有其他外在因子和內(nèi)在因子使發(fā)動(dòng)機(jī)的最佳點(diǎn)火提前角發(fā)生偏移.
2 模糊控制算法在線標(biāo)定點(diǎn)火提前角
2.1 模糊控制算法在線標(biāo)定前提
模糊控制算法在線標(biāo)定的前提條件為發(fā)動(dòng)機(jī)必須工作在亞穩(wěn)態(tài),即發(fā)動(dòng)機(jī)轉(zhuǎn)速、節(jié)氣門(mén)開(kāi)度必須穩(wěn)定在某一工況,其采樣點(diǎn)滿足下式,
(1)
式中,nK、nK-1分別為當(dāng)前采樣時(shí)刻的轉(zhuǎn)速、上一采樣時(shí)刻的轉(zhuǎn)速,aL為轉(zhuǎn)速改變量限值,αK、αK-1分別為當(dāng)前采樣時(shí)刻的節(jié)氣門(mén)開(kāi)度、上一采樣時(shí)刻的節(jié)氣門(mén)開(kāi)度,bL為節(jié)氣門(mén)開(kāi)度改變量限值.
式(1)即是控制模糊控制算法在線標(biāo)定的前提,也是其啟動(dòng)條件.
2.2 模糊控制算法設(shè)計(jì)
點(diǎn)火提前角(φdeg)、輸出力矩(Tm)所構(gòu)成的函數(shù)Tm=f(φdeg)是非線性函數(shù),且為光滑的凸函數(shù),其輸出力矩先增大后減小,在一定區(qū)間內(nèi)存在最大值.
2.2.1 模糊控制算法輸入輸出確定.
模糊控制器輸入量選擇為力矩的變化量ΔTm、上一個(gè)采樣周期的修正點(diǎn)火提前角量增量Δφdeg0,模糊控制器輸出量為點(diǎn)火提前角修正量增量Δφdeg.3個(gè)輸入輸出量的論域分別為[-4,4]、[-1,1]、[-1,1],輸入輸出量化因子分別為20、z(離散采樣且延遲一個(gè)周期)、0.25,隸屬度函數(shù)選擇高斯隸屬度函數(shù).ΔTm在論域中劃分為9級(jí),分別為NB、NM、NMM、NS、ZE、PS、PMM、PM、PB.輸入Δφdeg0劃分為6級(jí),分別為NF、NM、NS、PS、PM、PF.輸出Δφdeg劃分為9級(jí),分別為NB、NM、NMM、NS、ZE、PS、PMM、PM、PB.其輸入輸出論域、自然語(yǔ)言、隸屬度函數(shù)如圖6所示.
2.2.2 模糊控制算法模糊規(guī)則庫(kù)設(shè)計(jì).
模糊控制規(guī)則庫(kù)設(shè)計(jì)基于如下思路:當(dāng)點(diǎn)火提前角Δφdeg發(fā)生改變時(shí),輸出力矩ΔTm發(fā)生改變.Δφdeg改變?yōu)檎瑢?duì)應(yīng)的ΔTm也為正,則繼續(xù)輸出正的Δφdeg;Δφdeg改變?yōu)檎瑢?duì)應(yīng)的ΔTm為負(fù),則輸出負(fù)的Δφdeg.Δφdeg改變?yōu)樨?fù),對(duì)應(yīng)的ΔTm為正,則輸出負(fù)的Δφdeg;Δφdeg改變?yōu)樨?fù),對(duì)應(yīng)的ΔTm為負(fù),則輸出正的Δφdeg.Δφdeg改變較大,對(duì)應(yīng)的ΔTm改變較小,則輸出Δφdeg減小.根據(jù)上述設(shè)計(jì)規(guī)則思想,點(diǎn)火提前角在遠(yuǎn)離最佳點(diǎn)火提前角時(shí),點(diǎn)火提前角的修正量增量步長(zhǎng)較大,能夠快速向最佳點(diǎn)火提前角靠攏.當(dāng)點(diǎn)火提前角距最佳點(diǎn)火提前角較近時(shí),點(diǎn)火提前角的修正量增量步長(zhǎng)較小,且越靠近最佳點(diǎn)火提前角,修正量增量步長(zhǎng)越小,最終點(diǎn)火提前角穩(wěn)定在最佳點(diǎn)火提前角,輸出力矩最大.模糊規(guī)則庫(kù)設(shè)計(jì)如表2所示.
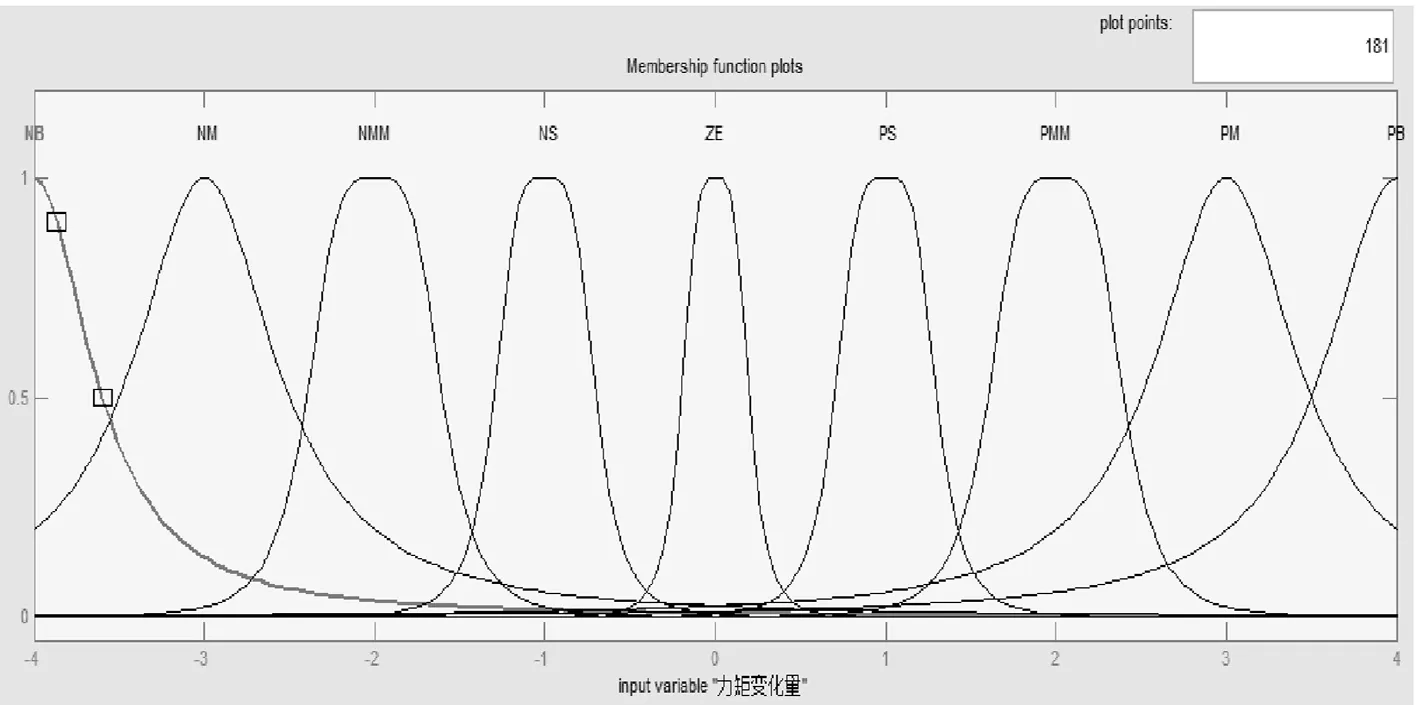
(a)輸入ΔTm隸屬度函數(shù)
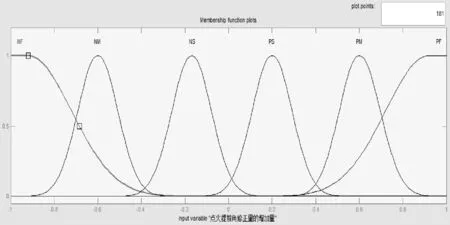
(b)輸入Δφdeg0隸屬度函數(shù)
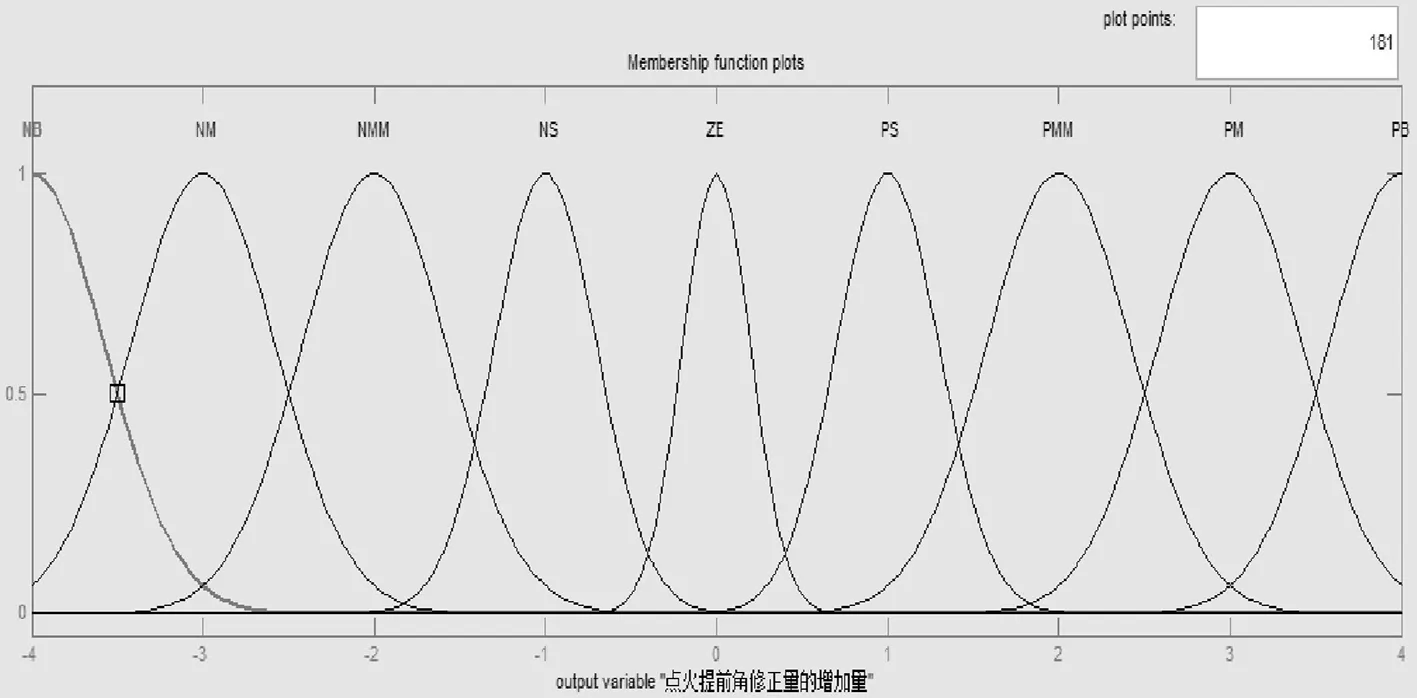
(c)輸出Δφdeg隸屬度函數(shù)
圖6輸入輸出隸屬度函數(shù)
2.2.3 模糊推理及反模糊化設(shè)計(jì).
模糊推理采用兩輸入單輸出的近似推理法中的Mamdani sup-min推理法.假設(shè)有如下n條推理規(guī)則(T=ΔTm,φ0=Δφdeg0,φ1=Δφdeg)R1,R2…,Rn:
ifTisA1andφ0isB1,thenφ1isC1,即,
R1=(A1×B1)×C1
ifTisA2andφ0isB2,thenφ1isC2,即,
R2=(A2×B2)×C2
…
ifTisAnandφ0isBn,thenφ1isCn,即,
Rn=(An×Bn)×Cn
則全部的模糊規(guī)則的總模糊蘊(yùn)含關(guān)系為,
(2)
對(duì)于任意的輸入向量(T,φ0),則有如下輸出,
Δφdeg=(T×φ0)°R
(3)
反模糊化采用重心法得到清晰化的修正量增量輸出如下式,
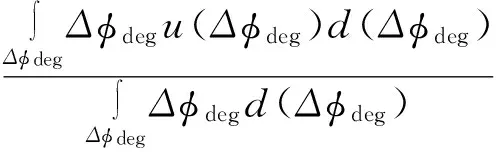
(4)
綜上,以發(fā)動(dòng)機(jī)輸出的力矩增量、點(diǎn)火提前角增量修正量為反饋量,在MATLAB的Simulink中建立得到仿真模型,其模型如圖7所示.
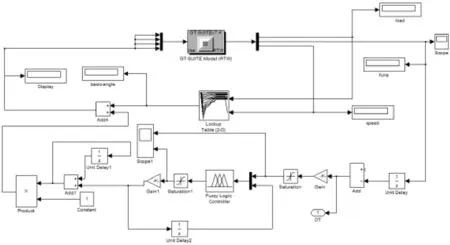
圖7模糊控制器仿真模型示意圖
3 仿真實(shí)驗(yàn)
3.1 輸入ΔTm的量化因子整定
發(fā)動(dòng)機(jī)節(jié)氣門(mén)開(kāi)度為0.6,轉(zhuǎn)速為3 000 r/min,溫度為300 K,仿真時(shí)采樣時(shí)間取0.1 s.輸入ΔTm的量化因子取1、80、160,仿真結(jié)果如圖8所示.
從圖8可知,當(dāng)輸入量化因子過(guò)小為1時(shí),模糊控制器尋優(yōu)得到的點(diǎn)火提前角穩(wěn)定在距離最佳點(diǎn)火提前角約1.5 deg處,尋優(yōu)達(dá)到穩(wěn)定狀態(tài)所花時(shí)間為0.4 s;當(dāng)輸入量化因子過(guò)大為160時(shí),模糊控制器尋優(yōu)得到的點(diǎn)火提前角在不停震蕩,震蕩區(qū)間為[-14.2,
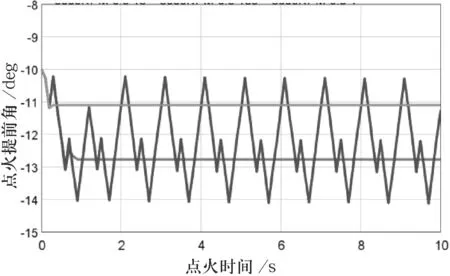
圖8輸入量化因子影響
10.3] deg;當(dāng)輸入量化因子為15時(shí),點(diǎn)火提前角穩(wěn)定在最佳點(diǎn)火提前角附近,尋優(yōu)達(dá)到穩(wěn)定狀態(tài)所花時(shí)間為1.2 s.
同理,可以得到不同轉(zhuǎn)速、不同輸入量化因時(shí),模糊控制器尋優(yōu)得到的點(diǎn)火提前角以及對(duì)應(yīng)的力矩,結(jié)果如表3所示.

表3 輸入量化因子影響
在表3中,φdeg為尋優(yōu)后的點(diǎn)火提前角,t為尋優(yōu)達(dá)到穩(wěn)定狀態(tài)所花費(fèi)時(shí)間.轉(zhuǎn)速2 000~3 000 r/min時(shí),點(diǎn)火提前角震蕩區(qū)間分別為[-14.7,-7.9]、[-14.2,10.3]、[-15.8,-12.1].
綜上,輸入量化因子過(guò)小導(dǎo)致點(diǎn)火提前角距離最佳點(diǎn)火提前角存在一定角度差,過(guò)大會(huì)導(dǎo)致點(diǎn)火提前角輸出震蕩,尋優(yōu)所花費(fèi)時(shí)間與量化因子正相關(guān).綜合大量仿真實(shí)驗(yàn)可以得到,輸入量化因子取值20時(shí)較為合理.
3.2 不同外界溫度下在線標(biāo)定仿真
發(fā)動(dòng)機(jī)工作在節(jié)氣門(mén)開(kāi)度0.6下,轉(zhuǎn)速為3 000 r/min,溫度為300 K和230 K,輸入量化因子取值20,仿真時(shí)采樣時(shí)間取0.1,仿真結(jié)果如圖9所示.
從圖9可知,相對(duì)于初始點(diǎn)火提前角,300 K時(shí)減少了3.2 deg,穩(wěn)定在-13.2 deg,力矩從157 N.m增加到160.3 N.m,增加了2.6 N.m;230 K時(shí)點(diǎn)火提前角減小了11.9 deg,穩(wěn)定在-21.9 deg,力矩從162.3 N.m增加到171.2 N.m,增加8.8 N.m.
4 結(jié) 論
模糊控制器能夠快速、穩(wěn)定地在線尋優(yōu)與輸入量化因子相關(guān):輸入量化因子大,則尋優(yōu)時(shí)間快,容易發(fā)生震蕩;輸入量化因子小,則尋優(yōu)時(shí)間長(zhǎng),且容易在距離函數(shù)Tm=f(φdeg)極大值點(diǎn)較遠(yuǎn)的點(diǎn)穩(wěn)定下來(lái),達(dá)不到尋優(yōu)目的.合理地選擇輸入量化因子,能夠使模糊控制器穩(wěn)定,從而快速尋優(yōu).仿真實(shí)驗(yàn)結(jié)果表明,本研究所提模糊控制算法,具有快速、穩(wěn)定以及精度高的優(yōu)點(diǎn),能夠在線尋找復(fù)雜工況下發(fā)動(dòng)機(jī)的最佳點(diǎn)火提前角.

(a)不同溫度下尋優(yōu)點(diǎn)火提前角
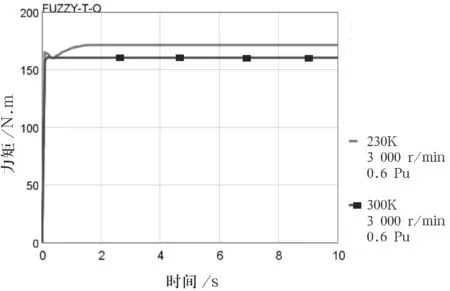
(b)不同溫度下尋優(yōu)點(diǎn)最大力矩
圖9不同外界溫度尋優(yōu)結(jié)果
[1]劉振聞,謝習(xí)華.車(chē)用汽油機(jī)點(diǎn)火正時(shí)的模糊控制仿真[J].中國(guó)公路學(xué)報(bào),2000,13(1):118-121.
[2]李冰林,魏民祥.二沖程煤油發(fā)動(dòng)機(jī)整機(jī)建模與初始點(diǎn)火提前角計(jì)算分析[J].機(jī)械科學(xué)與技術(shù),2013,32(5):704-708.
[3]胡春明,馬帥,等.基于缸內(nèi)凈壓力的直噴發(fā)動(dòng)機(jī)最佳點(diǎn)火正時(shí)[J].燃燒科學(xué)與技術(shù),2017,23(1):15-21.
[4]王麗君,司愛(ài)國(guó),等.氫燃料發(fā)動(dòng)機(jī)點(diǎn)火正時(shí)控制優(yōu)化[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(3):19-22.
[5]劉金武.龔金科,等.基于多維模型的電噴汽油機(jī)MAP圖的數(shù)值生成[J].汽車(chē)工程,2006,28(8):719-724.
[6]王銀燕,杜劍維,王賀春,等.基于GT-power與Simulink的發(fā)動(dòng)機(jī)及其控制系統(tǒng)仿真[J].系統(tǒng)仿真學(xué)報(bào),2008,20(16):4379-4382.
Abstract:A gasoline engine is used as a prototype,and a simulation model is built in GT-Power.The simulation results show that the simulation model has less than 3% error in the output power and torque compared with the prototype.Based on the model,the influence of ignition advance angle on the output power and torque is simulated and analyzed,and the influence of different working conditions on the output performance of the engine is simulated and analyzed.The output torque is used as the optimization target,and meanwhile the output torque change amount and the ignition advance angle change amount at the last sampling time are used as the fuzzy control algorithm input.The current ignition advance angle change amount is used as the fuzzy control algorithm output,and the fuzzy control algorithm is used to find the ignition advance angle of the output torque max point.The GT-Power and Simulink joint simulation results show that the control strategy modifies the ignition advance angle,improves the output torque of the engine,and has the characteristics of being fast,stable and highly precise.
Keywords:ignition advance angle;torque;fuzzy control;simulation
IgnitionTimingControlStrategyandSimulationResearchonFourCylinderGasolineEngine
LEILin1,2,LAIZhenliang1,2,ZHAOYongxing1,LIKai3
(1.School of Information Science and Engineering, Chengdu University, Chengdu 610106, China;2.School of Electrical Engineering and Electronic Information, Xihua University, Chengdu 610039, China;3.Chengdu Yinpu Precision Mechanism Co., Ltd., Chengdu 610500, China)
U463.64;TK413.9
A
1004-5422(2017)03-0276-05
2017-05-24.
四川省科技廳科技支撐計(jì)劃(2011GZ0194)資助項(xiàng)目.
雷 霖(1962 — ), 男, 博士, 教授, 從事汽車(chē)電子關(guān)鍵技術(shù)研究.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車(chē)與新動(dòng)力(2014年2期)2014-02-27 12:10:15
汽車(chē)與新動(dòng)力(2013年5期)2013-03-11 16:08:17