基于激光位移傳感器的無線通信技術研究
2017-10-12 03:15:32周春梅
現代電子技術 2017年19期
關鍵詞:數據采集
周春梅

摘 要: 傳統無線通信系統存在透明傳遞特性,不能實現傳感器位移數據的預操作,數據傳輸偏差高、效率低等缺陷,為此,設計了基于激光位移傳感器的無線通信系統。采用多路傳感器同時采集、操作、顯示以及傳輸,采用ZigBee 技術建立無線傳感器網絡,通過傳感器的終端數據采集模塊,設計了網絡協調器模塊同上位機的通信接口,并給出無線通信系統檢測程序。實驗結果表明,該系統極大地提升了激光位移傳感器的使用效率,并且數據無線傳輸的實時性和準確率都較高。
關鍵詞: 激光位移傳感器; 無線通信; 通信接口; 數據采集
中圖分類號: TN95?34 文獻標識碼: A 文章編號: 1004?373X(2017)19?0025?03
Research on wireless communication technology based on laser displacement sensor
ZHOU Chunmei
(School of Electronic and Information Engineering, Sichuan Technology and Business University, Chengdu 611745, China)
Abstract: The traditional wireless communication system exists the transparent transmission characteristics, can′t realize the pre?operation of sensor displacement data, and has the defects of high data transmission deviation and low transmission efficiency. Therefore, a wireless communication system based on laser displacement sensor was designed. Several sensors for multi channels are used to acquire, operate, display and transmit the data at the same time. The ZigBee technology is adopted to establish the wireless sensor network (WSN). By means of the terminal data acquisition module of the sensor, the communication interface between network coordinator module and upper computer is designed, and the detection procedure of the wireless communication system is given. The experimental results show that the system can enhance the use efficiency of laser displacement sensor greatly, and its real?time performance and accuracy for data wireless transmission are high.
Keywords: laser displacement sensor; wireless communication; communication interface; data acquisition
0 引 言
激光位移傳感器廣泛應用在工業長度、距離等檢測領域中。傳統系統通常采用有線電纜方式完成激光位移傳感器的數據傳輸,該傳輸方式容易受到檢測環境的干擾,存在布線復雜以及繞線困難等缺陷[1?2],因此,無需布線的無線通信方式成為當前檢測領域相關人員分析的重點[3?4]。而傳統系統存在透明傳遞特性,在無線傳輸前不能實現傳感器位移數據的預操作,導致數據傳輸偏差高、效率低。
激光位移傳感器通常應用于測控現場、電源供電以及數據傳輸過程中,通常采用有線電纜完成數據的傳輸。受到環境的限制,鋪設電纜需要耗費較高的成本,大大降低了傳感數據的傳輸質量[5?7]。故設計基于激光位移傳感器的無線通信系統,實現激光位移傳感數據的高效率、高精度傳輸,具有重要的應用價值。
1 基于激光位移傳感器的無線通信技術
1.1 激光位移傳感器的介紹
激光位移傳感器基于激光三角檢測原理實施非接觸檢測,具有結構簡化、檢測效率和精度高的優勢,廣泛應用在工業長度、距離等檢測領域中。激光三角檢測法在運行過程中,激光發射器通過鏡頭將激光束射向待測物體,物體反射的激光被激光器鏡頭中的感光元件采集形成光點,感光元件基于不同感光角度獲取不同距離發射的激光對應的光點[8]。數據信號處理器對傳感器同待測物體間的距離實施計算過程中,需要全面分析感光角度、激光同感光元件間的距離等因素。激光位移傳感器的檢測原理圖用圖1描述,能夠看出物體位置變化時,光點位置也變化,激光位移傳感器基于光點的位置能夠檢測到待測物體的位移[9]。本文采用來自德國米銥公司的opto NCDT 1700LL系列激光位移傳感器。該傳感器數據輸出規范是RS 422串口協議,其采用一根RS 422轉USB的數據線同電腦通信。
1.2 基于多激光位移傳感器的無線通信系統設計
多個激光位移傳感器能夠檢測到多個被測點的位置信息,可以實現復雜檢測任務。因此,基于opto NCDT 1700LL激光傳感器,設計多激光位移傳感器的無線通信系統,可提升無線通信系統的數據傳輸率和精確度。endprint
1.2.1 無線通信系統總體結構設計
因為ZigBee技術是一種短距離、高效率的雙向無線通信技術,信息在ZigBee網絡中采用自由路由的途徑進行交互,增強了網絡信息傳遞的平穩性。在利用激光位移傳感器檢測時,采用ZigBee組網技術,通過大量傳感器間的協同運行獲取大量的位移數據。本文基于ZigBee無線技術,設計多激光位移傳感器的無線通信系統,實現多路傳感數據的同時采集、操作、顯示以及傳輸。設計的無線通信系統結構圖,如圖2所示。
從圖2中能夠看出,多激光位移傳感器無線通信系統能夠對多個opto NCDT 1700LL激光位移傳感器的數據進行采集,RFD為終端部件,不同的激光位移傳感器通過RFD實現位移數據的無線傳遞。數據接收端通過協調器FFD驅動網絡,并采集各終端部件獲取的位移數據,采用USB接口同電腦通信,將獲取的位移數據反饋給上位機進行分析[7]。鋰電池為系統提供電能,將MAX488當成數據接口協議,數據接收端通過協調器同上位機端USB接口交互信息。
1.2.2 無線通信系統硬件設計
(1) DTD253模塊接口設計。無線通信系統采用的無線通信模塊是DTD253模塊,其依據ZigBee規范以及CC2530芯片設計而成,擁有250 Kb/s的傳輸速率,供電電壓取值范圍為2.0~3.6 V。由于發送端激光位移傳感器的輸出以及DTD253模塊的輸入電平不同,因此需要通過芯片MAX488電路完成激光位移傳感器輸出接口電平到DTD253模塊串口電平的變換,實現激光位移數據的無線通信。MAX488的串口422信號線同激光位移傳感器接口連接,MAX488的WED接口和TXD接口分別同DTD253模塊的TX、WE信號線連接。串口接頭管腳示意圖見圖3。
圖3 串口接頭管腳示意圖
R?,R+,T?,T+以及GND信號線對應于圖3中的1~5號管腳,6~9號引腳空閑,將6號引腳設置成24 V的電源管腳,向數據采集節點的穩壓模塊提供電能,解決了從鋰電池端融入電能產生的復雜接線問題。
采用Altium Designer軟件實施PCB設計,數據接收端的協調器為新的DTD253模塊,協調器可以采集和傳輸數據。DTD253B模塊的接口是TTL串口,采用FT232芯片實現串口轉USB接口的轉換,實現協調器同電腦端的通信,使得USB接口向DTD253提供電能。FT232R芯片的17管腳是3.1VOUT引腳,DTD253模塊擁有30 mA以及25 mA的發射電流和接收電流。通過FT232芯片的17引腳向DTD 235B協調器提供3.1 V電壓。
(2)處理器設計。數據處理單元對多個opto NCDT 1700LL激光傳感器位移數據實施操作。opto NCDT 1700LL傳感器的最大數據輸出頻率是2.5 kHz。本文采用Atmega1280?16AU AVR單片機,將其當成激光位移傳感器無線通信系統的處理器。其處理速度為16 MHz,FLASH存儲器和SRAM存儲器的容量分別為128 KB和8 KB,模擬輸入接口的數量是16。
1.2.3 無線通信系統檢測程序設計
無線傳輸程序的關鍵內容是協調器節點程序以及終端節點程序,協調器采用串口向上位機傳輸字符串,并向終端節點分配網絡地址,此時協調器將節點的地址信息反饋給上位機。
終端節點采集激光位移傳感器的位移數據,完成數據操作后,向協調器反饋位移數據,協調器向上位機反饋位移數據。采用IAR Embedded Workbench系統完成終端節點串口程序的編寫,該串口程序可對數據實施操作,基于激光位移傳感器的無線通信網絡系統中,傳輸數據前將數據設置成“&x=00.0000mm”的顯示格式。
采用輪詢任務調度隊列方法控制任務調度,通過定時器管理終端節點的數據發送過程。無線通信網絡包括兩個激光位移傳感器終端節點和一個協調器,傳輸位移數據的時間間隔是2 s。
2 實驗分析
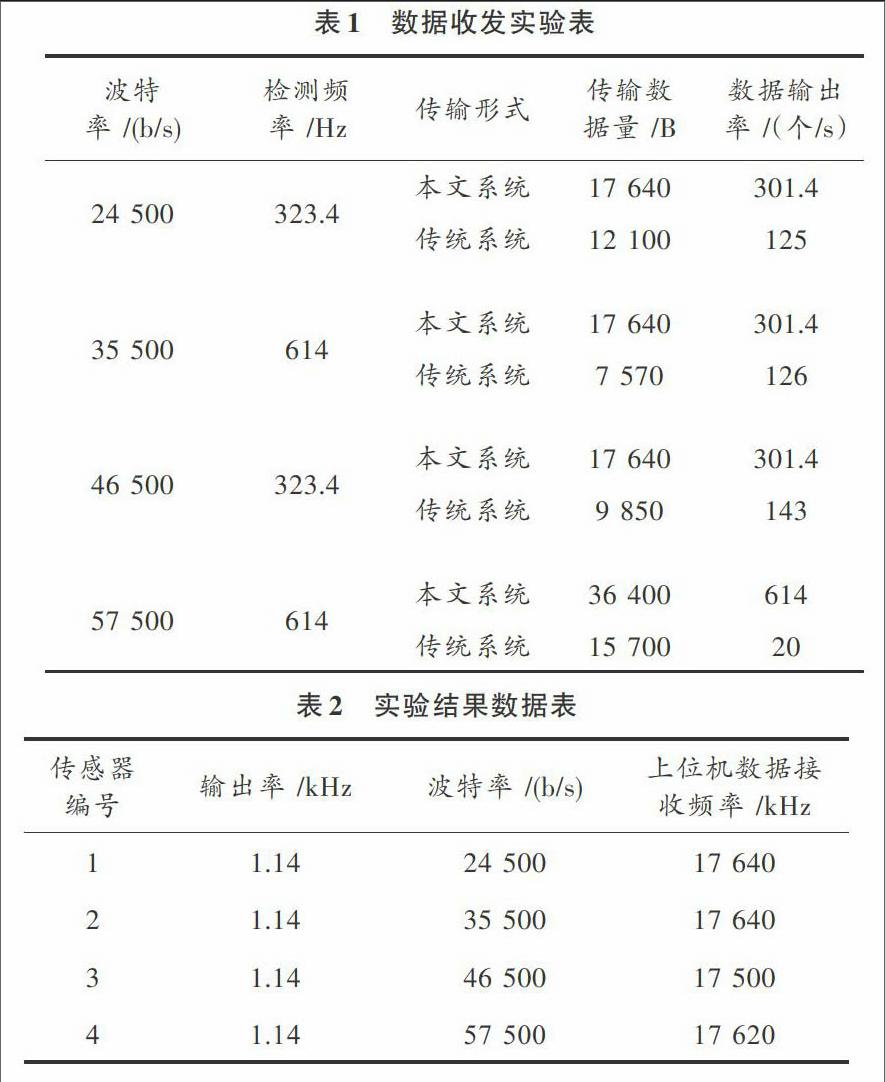
實驗對無線射頻開發板進行編程調試,融合本文采用的opto NCDT 1700LL激光位移傳感器和無線通信系統,實施收發數據實驗,結果見表1。
分析表1能夠看出:在激光位移傳感器的傳輸率高于300 Hz的情況下,傳統系統存在較高的掉包率;在激光位移傳感器串口波特率為57 500 b/s的情況下,傳統系統的串口通信堵死,不能傳輸數據,僅能進行每秒收發約20個的位移數據,遠遠低于激光位移傳感器要求的最高檢測頻率2.5 kHz。而基于多激光位移傳感器的無線通信系統在上述兩種情況下,都具有較高的數據傳輸量和數據輸出率,并且不存在掉包和堵死的問題,說明本文無線通信系統能夠實現數據的高效率傳輸。
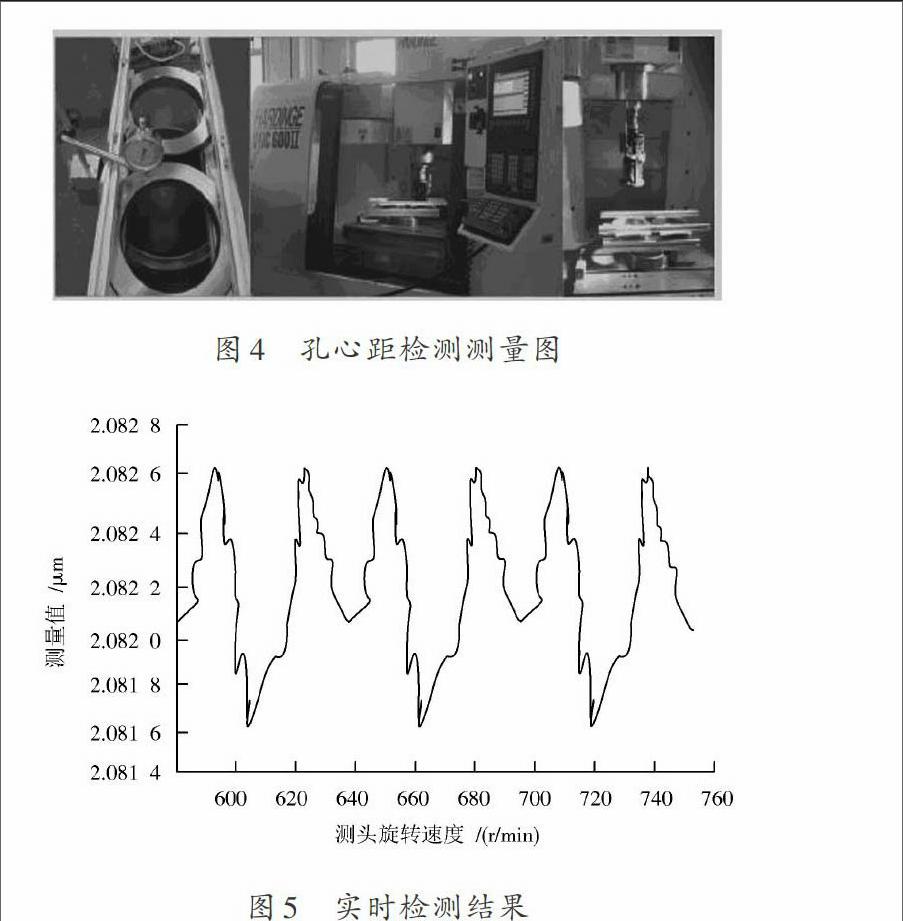
實驗將本文無線通信系統應用到新型機床測頭中,在機床主軸中部署激光位移傳感器,融合逼近式空芯定位法,實現待測工件幾何尺寸檢測,檢測實物圖如圖4所示。其中的激光位移傳感器可確保測頭的檢測精度達到微米級(μm),測頭隨主軸進行高速旋轉,并對待測工件實施動態檢測。
圖5是本文無線通信系統對圖4中的待測工件實施檢測的結果,可以看出,測頭高速旋轉時,本文系統檢測的工件孔心距數據保持平穩的規律變化,數據傳輸穩定,總體工件孔心距的檢測誤差為微米,具有較高的實用性和檢測精度。
3 結 語
根據激光位移傳感器的數據傳輸原理,本文設計了基于多激光位移傳感器的無線通信系統,實驗結果表明,該系統極大地增強了激光位移傳感器在檢測領域中的應用價值。
參考文獻
[1] 劉婭,徐震,楊蕾.基于物聯網的無線傳感器網絡路由協議研究[J].光通信研究,2014,40(1):67?70.
[2] NAGAI Y, IBARAKI S, NISHIKAWA S. Error calibration of five?axis machine tools by on?machine measurement system using a laser displacement sensor [J]. Journal of advanced mechanical design systems & manufacturing, 2014, 8(4): 27?37.
[3] XING Z, CHEN Y, WANG X, et al. Online detection system for wheel?set size of rail vehicle based on 2D laser displacement sensors [J]. Optik?international journal for light and electron optics, 2016, 127(4): 1695?1702.
[4] 吳曉軍,劉敏,李筆鋒,等.基于激光雷達觀測數據的無線光通信系統性能研究[J].光電子·激光,2014(11):2146?2151.
[5] PARALI Levent, PECHOUSEK Jiri, ?ABIKO?LU ?srafil, et al. A digital measurement system based on laser displacement sensor for piezoelectric ceramic discs vibration characterization [J]. Optik?international journal for light and electron optics, 2016, 93: 11?24.
[6] 楊萍,宋宏,樓利旋,等.鹽水和沙子上方傳輸激光束波前畸變校正的對比研究[J].紅外與激光工程,2016,45(4):23?29.
[7] ZHA J L, LI H Z. Analysis of the principle of laser displacement sensor and its application [J]. Applied mechanics & materials, 2015, 734: 84?89.
[8] JIANG Z, SONG B, ZHOU X, et al. On?machine measurement of location errors on five?axis machine tools by machining tests and a laser displacement sensor [J]. International journal of machine tools & manufacture, 2015, 95: 1?12.
[9] 吳偉,于成龍.基于無線傳感器網絡的移動目標跟蹤系統研究[J].壓電與聲光,2014,36(1):147?149.endprint
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
