基于Canny算子和改進型Hough變換的邊緣定位方法*
2017-10-13 22:59:53馬敬奇盧亞李柳瓊盧杏堅何峰鐘震宇
自動化與信息工程 2017年3期
關鍵詞:檢測
馬敬奇 盧亞 李柳瓊 盧杏堅 何峰 鐘震宇
?
基于Canny算子和改進型Hough變換的邊緣定位方法*
馬敬奇1盧亞2李柳瓊3盧杏堅1何峰1鐘震宇1
(1.廣東省智能制造研究所廣東省現代控制技術重點實驗室廣東省現代控制與光機電技術公共實驗室2.廣東華中科技大學工業技術研究院廣東省制造裝備數字化重點實驗室3.工業和信息化部電子第五研究所)
針對矩形目標外邊框定位問題,提出一種結合Canny算子和改進型Hough變換的邊緣定位方法。獲取待檢測圖像后進行亮度補償,使圖像亮度分布均勻;標記標準目標Canny邊緣提取時的最佳閾值和Hough變換時的最佳閾值,并將該標記閾值用于動態邊框提取,以獲取疑似目標外邊框的直線;利用外邊框之間的線性關系組成目標外邊框提取的判定條件,實現目標外邊框的準確定位。實驗結果表明:該方法能夠有效定位目標外邊框,所檢測到的目標外邊框可用于目標定位、測量等。
邊緣定位;Canny算子;Hough變換;亮度補償
0 引言
圖像采集設備獲得的圖像含有豐富的邊緣信息,而直線是組成邊緣的重要元素。直線為視覺感知提供重要的引導作用,可用于圖像理解并區分物體,有利于后期處理過程中目標的定位、測量、統計等。因此,研究如何準確提取圖像中目標的邊緣具有重要意義。
針對邊緣提取及直線檢測,學者們已展開大量的研究工作,并取得一定的成果。文獻[1]利用梯度方向直方圖提取直線輪廓,該方法無需閾值即可自動提取直線邊緣,但對多個直線目標同時檢測時失效;文獻[2]從時頻和空間變換出發,改進圖像中直線檢測算法,但該算法檢測128×128的圖像耗時213 ms,檢測效率低,不能滿足高速檢測要求;文獻[3]通過邊緣連接實現了一種快速直線檢測算法,精確度和速度均優于霍夫變換;文獻[4]實現一種基于單水平集的多目標輪廓提取算法,但該算法對處理的圖像要求非常苛刻,實用性并不強;文獻[5]研究了建筑輪廓角點的提取方法,利用輪廓密度估計方法較為準確地提取出建筑輪廓網格;文獻[6]利用梯度值降低Hough變換的計算量,但計算誤差導致直線方向不確定;文獻[7]利用多個水平集函數建立模型實現多目標輪廓的提取,但隨著水平集的增多模型的復雜度變大。
實際的直線檢測過程比較復雜,目標除了自身邊緣直線外還含有其他線性元素,易帶來直線干擾。目前缺乏在復雜環境下準確提取矩形目標邊緣的有效方法。為此,本文提出一種基于Canny算子和改進型Hough變換的邊緣定位方法,首先將原始圖像經過亮度補償得到亮度變化均勻的圖像;然后改進Canny算子和Hough直線檢測算法;最后采用Canny算子和Hough直線檢測算法相結合的方法,實現矩形目標邊緣的精準定位。
1 邊緣定位方法
本文邊緣定位方法如圖1所示。在獲取原始圖像后,首先進行亮度補償,提高圖像質量;其次為自適應的獲取圖像邊緣,經過改進Canny算子動態提取圖像邊緣;接著利用改進的Hough變換初步確定疑似目標邊緣的直線;最后通過邊緣判定規則實現目標外邊框的精確定位。
2 圖像的亮度補償
在檢測過程中,光源亮度變化使圖像局部亮度、對比度有所差異,需要進行圖像亮度補償[8],以獲得高質量圖像。
本文采用基于灰度直方圖的圖像均衡化方法[9]對待檢測圖像進行亮度補償。當圖像的灰度呈均勻分布時,圖像所包含的信息最明顯,圖像質量也最好。原圖像經過灰度級映射,變換成新的接近均勻分布的灰度級,再利用新的灰度級直方圖修正原圖像,灰度級分布范圍為[0,]的離散分布。圖像亮度補償過程:
1) 設原圖像灰度級為∈[0,],經過灰度級映射后的灰度級為∈[0,];
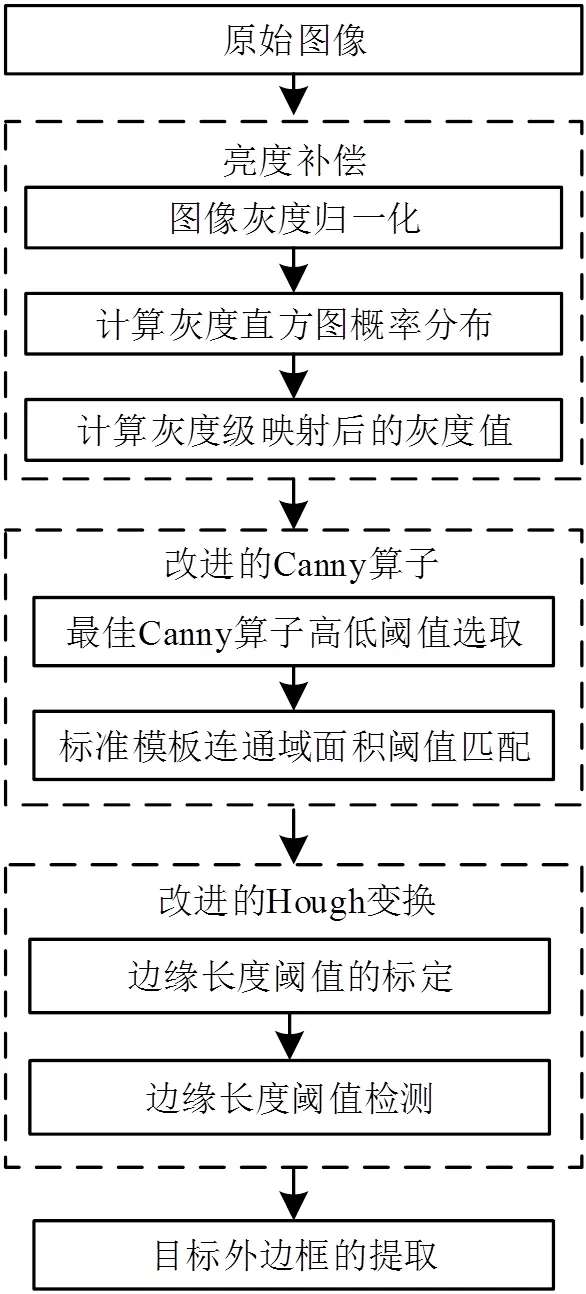
圖1 算法流程圖
3 直線檢測
考慮到生產過程中,對同一類目標外邊框的提取是在相同環境中進行的,本文采用Canny算子與Hough直線檢測相結合的方法定位目標外邊框,實現目標與背景分離開。
3.1 Canny算子的改進
Canny算子有高信噪比、高定位精度特點[10],對Canny算子做如下改進:
1) Canny算子采用標準目標模板進行邊緣檢測時的最佳邊緣提取閾值、,獲取待檢測圖像邊緣;
2) 經Canny算子檢測后,統計所獲取的邊緣圖像中的連通域面積,并采用標準目標模板邊緣檢測時標記的面積閾值,對待檢測圖像的連通域進行篩選,去除面積小于的連通域。
3.2 改進的Hough變換
經改進Canny算子檢測后,得到目標圖像的邊緣圖,包含目標外邊框的邊緣直線。接著對邊緣圖像進行Hough直線檢測[11],可能檢測出其他滿足直線特點的線段,這會給外邊框的定位帶來干擾。為此,本文將Hough變換作如下改進:
1) 在對標準目標模板進行邊緣提取時,記錄外邊框的4個邊緣長度、、、,其中,且;
(注:理論上矩形的對邊是相等的,但相機所拍攝的圖像精度存在誤差,在像素級上對邊長度存在小范圍差異,設誤差范圍在0.05%之內,同樣適用檢測圖像)
4 目標外邊框的提取
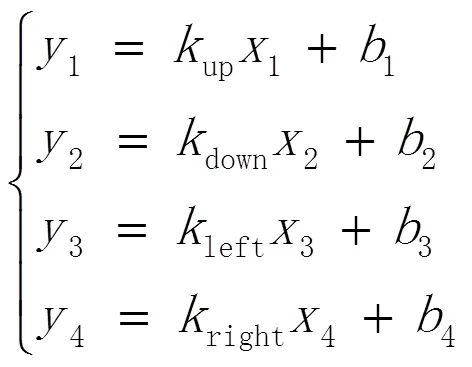
經過以上處理,所獲取的邊緣圖像中含有目標外邊框和滿足Hough變換條件的直線。為獲得精確的目標外邊框,設目標外邊框上邊為,下邊框為,左邊框為,右邊框為。目標邊框是正規矩形,因此滿足對邊相等且斜率相同的特點。故此,對經過改進Hough變換檢測到的直線進行如下判定:
目標外邊框提取的具體過程如下:
Step1:計算每條直線段的中點坐標,組成中點坐標集合,,其中為直線段總數;
Step5:對于不滿足判定條件3的直線,查看是否有相同中點坐標的直線,若有則取下一個點所在的直線段繼續進行Step4,直到找到滿足斜率判定條件的直線;若沒有滿足條件的,則返回Step2中的集合,重新選擇邊界直線,選取方法為:通過判定條件2,若確認所在直線不滿足,則加1;若確認所在直線不滿足,則減去1;若確認所在直線不滿足,則加1;若確認所在直線不滿足,則減1,返回Step3;
Step6:確認了邊界所在直線后,聯立4條直線建立方程組,求出相鄰2條直線的交點坐標、、、;
Step7:根據各條直線之間的交點求出4個邊框的長度,并與標準的目標4個邊框長度、、、對比,若確定的邊框長度分別與對應的標準邊框長度相同,則結束外邊框提取過程;若存在與對應的標準邊框長度不同的,則返回Step5,繼續進行提取。
5 實驗分析
為驗證本文算法的有效性,選取玩具拼接板圖像為實驗對象進行外邊框的定位。實驗所用硬件平臺為內存8G 、Intel(R) Core(TM)i7- 6500U CPU、操作系統64位的計算機,軟件系統為VS2010。
1) 調節與配置檢測軟件、相機和光源,并用相機拍攝標準拼接板圖像,再利用Canny算子提取標準拼接板圖像的邊緣,調節Canny邊緣提取閾值,記錄當拼接板外邊框完整地被檢測到時的邊緣提取閾值;接著Hough直線檢測并記錄高低閾值,標記4條完整外邊框的長度。標準拼接板原圖像如圖2(a)所示,提取到完整拼接板外邊框的圖像如圖2(b)所示。提取到完整拼接板外邊框時邊緣閾值、4條邊長度如表1所示,其中為左邊緣、為上邊緣、為右邊緣、為下邊緣。
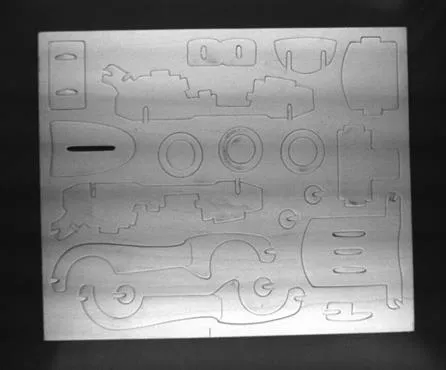
圖2 (a) 拼接板原圖 圖2 (b) Canny提取最佳邊框

表1 Canny最佳提取閾值和拼接板外邊框長度
2) 保持光源環境不變,對待檢測的拼接板圖像進行亮度補償,亮度補償后的圖像和補償后灰度直方圖如圖3所示。亮度補償后,拼接板上下邊緣靠近光源的強光區域亮度得到弱化,整個圖像亮度分布更均勻。對比亮度補償前后圖像的直方圖,補償后灰度級趨近均勻分布,而原直方圖灰度分布較為集中。
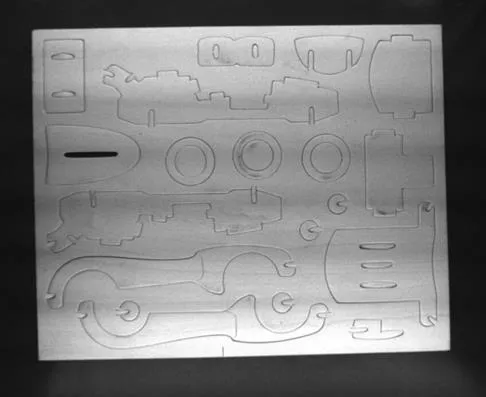
圖3(a) 待檢測原圖像 圖3 (b) 亮度補償后的待檢測圖像
3) 采用改進Canny算子和改進Hough直線檢測相結合的方法提取拼接板,檢測效果如圖4所示。經過改進Canny算子提取到的拼接板邊緣如圖4(a)所示,從圖中可以看出外邊框完整保留,同時還保留其他邊緣細節,并去除了塊狀、斑點。圖4(a)經過改進后的Hough變換檢測到的直線如圖4(b)所示,圖4(a)經過原Hough變換檢測到的直線如圖4(c)所示。圖4(b)與圖4(c)相比圖中的直線數量明顯減少,僅留下符合條件的直線,其中包括目標的外邊框。
4) 利用本文所提目標外邊框的判斷方法得到的目標外邊框如圖5所示。從圖5可以看出所提判斷方法準確的定位到拼接板的外邊框,將目標區域完整地從圖像中分割出來。
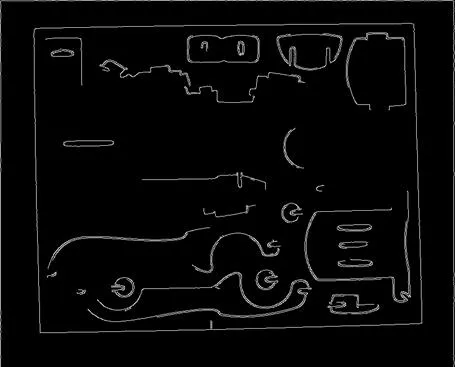
圖4(a) 改進的Canny邊緣檢測
圖4(b) 改進的Hough直線檢測 圖4(c) 原Hough直線檢測
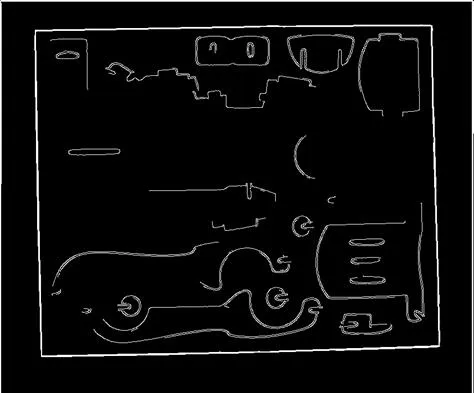
圖5 動態檢測到的目標邊緣
6 結論
本文提出一種結合改進Canny算法和改進型Hough直線檢測算法的目標外邊框定位方法,實驗表明:1) 該方法在保證完整提取目標外邊框的同時減少了非目標邊框直線的輸出,提高了Hough直線算法的檢測效率;2) 通過直線特征分析和計算,實現目標外邊框的準確定位。邊緣定位結果可用于目標的定位、測量等。
[1] 張小虎,李由,李立春,等.一種基于梯度方向直方圖的直線輪廓提取新方法[J].光學技術,2006,32(6):824-826.
[2] 趙小川,羅慶生,陳少波.改進型圖像中的直線快速檢測[J].光學精密工程,2010,18(7):1654-1660.
[3] 董晶,楊夏,于起峰.基于邊緣連接的快速直線段檢測算法[J].光學學報,2013,33(3):220-227.
[4] 龔永義,羅笑南,黃輝,等.基于單水平集的多目標輪廓提取[J].計算機學報,2007,30(1):120-128.
[5] 童禮華,程亮,李滿春,等.地面LiDAR數據中建筑輪廓和角點提取[J].中國圖象圖形學報,2013,18(7):876-883.
[6] Galambos C, Kittler J , Matas J. Gradient based progressive probabilistic Hough transform[J]. Image Signal Processing , 2001, 148(3):158-165 .
[7] Vese L A , Chan T F. A multiphase level set framework for image segmentation using the Mumford and Shah model[J]. International Journal of Computer Vision, 2002,50(3):271-293.
[8] 袁興生,王正志.亮度補償變換矩陣的顏色恒常性算法[J].中國圖象圖形學報,2012,17(9):1055-1060.
[9] 韓殿元.低照度下視頻圖像保細節直方圖均衡化方法[J].計算機仿真,2013,30(8):233-236,300.
[10] 李俊山,馬穎,趙方舟.改進的Canny圖像邊緣檢測算法[J].光子學報,2011,40(增刊):50-54.
[11] 張振杰,郝向陽,劉松林,等.基于Hough一維變換的直線檢測算法[J].光學學報,2016,36(4):166-173.
Edge Location Method Based on Canny Operator and Improved Hough Transform
Ma Jingqi1Lu Ya2Li Liuqiong3Lu Xingjian1He Feng1Zhong Zhenyu1
(1.Guangdong Institute of Intelligent Manufacturing Guangdong Key Laboratory of Modern Control technology Guangdong Open Laboratory of Modern Control & Optical, Mechanical and Electronic Technology 2.Guangdong HUST Industrial Technology Research Institute, Guangdong Province Key Lab of Digital Manufacturing Equipment 3. CEPREI)
In this paper, an edge location method based on Canny operator and improved Hough transform is proposed to solve the edge localization problem of rectangular object. After obtaining the image to be detected, the brightness compensation is carried out, so that the brightness distribution of the image is uniform. The best threshold values of Canny operator are marked when extracting the standard target edge. The best threshold values of Hough transform are marked when detecting the standard target line. The tag threshold values are used to dynamic extract the border to obtain the suspected outer border lines of the object. After obtaining the suspected lines, use the linear relationship between the outer frames, the decision criteria of the extraction of the target outer frame are constructed and achieve the exact positioning of the target's outer borders. Experimental results show that the proposed algorithm can effectively locate the outer frame of target, and can be used for location, measurement and so on.
Edge Location; Canny Operator; Hough Transform; Brightness Compensation
馬敬奇,男,1988年生,碩士,主要研究方向:機器視覺、運動控制。E-mail: majingqiauto123@126.com
廣東省科技計劃項目(2011A060901026)
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48