基于電流模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器
2017-10-13 10:12:40陳飛鴻王天雷王步來
大電機(jī)技術(shù) 2017年2期
關(guān)鍵詞:模型
陳飛鴻,吳 捷,王天雷,王步來
?
基于電流模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器
陳飛鴻1,吳 捷1,王天雷2,王步來3
(1. 江門江菱電機(jī)電氣有限公司,廣東江門 529020;2.五邑大學(xué)信息工程學(xué)院,廣東江門 529020;3. 上海應(yīng)用技術(shù)學(xué)院,上海201400)
為了研究異步電機(jī)矢量控制系統(tǒng),本文提出了應(yīng)用電流模型設(shè)計(jì)Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器的新思路。為一臺(tái)模型樣機(jī)設(shè)計(jì)了基于電流模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器,并設(shè)計(jì)了基于異步電機(jī)全階模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器,還進(jìn)行了對(duì)比研究,結(jié)果表明,兩者的估計(jì)精度相當(dāng)。可見,本文所提的基于電流模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器是有效的、可行的。由于其狀態(tài)方程的維數(shù)降低,它比基于全階方程的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)器更適宜于在線觀測(cè)。
電流模型;Kalman濾波;轉(zhuǎn)子磁鏈;觀測(cè)器;仿真
1 前言
在異步電機(jī)矢量控制系統(tǒng)中,轉(zhuǎn)子磁鏈的檢測(cè)是關(guān)鍵。如果磁鏈的幅值或者相位檢測(cè)不準(zhǔn),將直接影響閉環(huán)系統(tǒng)的性能。如果磁鏈的檢測(cè)值小于實(shí)際值,將導(dǎo)致異步電機(jī)運(yùn)行在飽和狀態(tài);如果檢測(cè)值大于實(shí)際值,致使實(shí)際磁鏈偏小,實(shí)際電磁轉(zhuǎn)矩降低,影響帶負(fù)載能力。磁鏈的相位誤差將直接導(dǎo)致矢量控制的磁場(chǎng)定向不準(zhǔn)確,使得動(dòng)態(tài)過程中電流的磁鏈和轉(zhuǎn)矩分量相互耦合,出現(xiàn)滯后和振蕩現(xiàn)象[1]。
異步電機(jī)轉(zhuǎn)子磁鏈難以直接測(cè)量得到,目前的實(shí)際系統(tǒng)中,多采用間接觀測(cè)的方法獲取磁鏈信息。通過檢測(cè)電機(jī)的定子電壓、電流和轉(zhuǎn)速,然后根據(jù)相關(guān)的數(shù)學(xué)模型實(shí)時(shí)計(jì)算出磁鏈的幅值和相位。基于電機(jī)定子電流、電壓以及轉(zhuǎn)速的不同組合模型,可以衍生出許多不同的轉(zhuǎn)子磁鏈觀測(cè)方法。但從根本上來說,轉(zhuǎn)子磁鏈觀測(cè)均基于靜止或同步坐標(biāo)系下的電壓模型或電流模型[2]。不論是電壓型還是電流型磁鏈觀測(cè),以及全階觀測(cè)器模型,大多采用開環(huán)結(jié)構(gòu),并未構(gòu)成控制意義上的狀態(tài)觀測(cè),受量測(cè)噪聲等外部干擾和電機(jī)參數(shù)變化的影響較大,魯棒性差。有關(guān)文獻(xiàn)通過引入狀態(tài)誤差反饋對(duì)其進(jìn)行改進(jìn),提出了Luenberger 觀測(cè)器等轉(zhuǎn)子磁鏈閉環(huán)觀測(cè)方案[3-4]。但是必需憑經(jīng)驗(yàn)預(yù)先確定觀測(cè)器的極點(diǎn),若極點(diǎn)選擇不當(dāng),將導(dǎo)致觀測(cè)結(jié)果不準(zhǔn)確或觀測(cè)器收斂速度很慢[5-7]。
在設(shè)計(jì)磁鏈觀測(cè)器時(shí)另一種思路是考慮量測(cè)信號(hào)的噪聲使得觀測(cè)結(jié)果在某種意義上最優(yōu),當(dāng)噪聲用不相關(guān)的白噪建模時(shí),Kalman 濾波器可以給出完善的結(jié)果。
2 Kalman濾波磁鏈觀測(cè)模型
Kalman 濾波是20 世紀(jì)60 年代發(fā)展起來的一種現(xiàn)代濾波方法,它的一個(gè)重要作用在于線性系統(tǒng)的狀態(tài)估計(jì)。當(dāng)噪聲是正態(tài)分布時(shí),這種濾波給出了狀態(tài)的最小方差估計(jì);當(dāng)不是正態(tài)情況時(shí),這種濾波給出了狀態(tài)的線性最小方差估計(jì)[8]。一些文獻(xiàn)提出了采用Kalman 濾波進(jìn)行磁鏈觀測(cè)的方法[9-13]。對(duì)于異步電機(jī)的全階模型,一般采用定子電流i和轉(zhuǎn)子磁鏈ψ?作為狀態(tài)變量。異步電機(jī)的全階模型為:
設(shè)控制周期為T,考慮系統(tǒng)中的過程噪聲以及觀測(cè)噪聲,將其轉(zhuǎn)化為離散模型,如下:
()為過程白噪,其均值為零,協(xié)方差為
為觀測(cè)白噪,與不相關(guān),協(xié)方差為
對(duì)上述系統(tǒng)進(jìn)行Kalman 濾波器設(shè)計(jì),假設(shè)系統(tǒng)的初始狀態(tài)為
Kalman 濾波采用循環(huán)迭代算法,按照協(xié)方差最小的原則,不斷進(jìn)行狀態(tài)變量的預(yù)估和校正。其迭代過程如下所述[14]。
(1)計(jì)算狀態(tài)預(yù)估值
(2)計(jì)算協(xié)方差預(yù)估值
(3)計(jì)算Kalman濾波器增益
(4)更新協(xié)方差預(yù)估值
(5)更新狀態(tài)預(yù)估值
式中:為Kalman 增益矩陣;
為系統(tǒng)的協(xié)方差,即
上述基于全階模型的Kalman濾波迭代算法比較復(fù)雜,計(jì)算量很大。觀察迭代過程可以發(fā)現(xiàn),如果矩陣和均為常數(shù)矩陣,則協(xié)方差矩陣和增益矩陣隨時(shí)間收斂為常值,可以直接采用與的收斂值帶入計(jì)算,忽略初始狀態(tài)對(duì)系統(tǒng)的影響。但實(shí)際上,雖然為常數(shù)矩陣,但中含有轉(zhuǎn)速?,為典型的非線性系統(tǒng)。轉(zhuǎn)速的變化使得Kalman 濾波必須采用上述迭代算法。為簡(jiǎn)化算法,提高運(yùn)算速度,本文提出一種基于電流模型的Kalman濾波磁鏈觀測(cè)模型。
3 基于電流模型的Kalman濾波磁鏈觀測(cè)模型
在異步電機(jī)兩相靜止坐標(biāo)系下的磁鏈方程中,轉(zhuǎn)子的磁鏈方程為:
上式其實(shí)就是轉(zhuǎn)子磁鏈的電流模型。不過由于鼠籠式異步電機(jī)轉(zhuǎn)子電流無法測(cè)量,因此無實(shí)際應(yīng)用價(jià)值,在仿真研究中可以作為實(shí)際值。將式(3)改寫如下:
方程(4)既可以理解為(1)的降維狀態(tài)方程,也可以理解為傳統(tǒng)的電流模型。
本文對(duì)式(4)設(shè)計(jì)Kalman濾波器,以更精確地估算轉(zhuǎn)子磁鏈。對(duì)式(4)進(jìn)行離散化,控制周期為T,則式(4)變?yōu)?/p>
上述Kalman濾波的循環(huán)迭代過程如下
(1)計(jì)算狀態(tài)預(yù)估值
(2)計(jì)算協(xié)方差預(yù)估值
(3)計(jì)算Kalman濾波器增益
(4)更新協(xié)方差預(yù)估值
(5)更新狀態(tài)預(yù)估值
4 基于電流模型的Kalman濾波器轉(zhuǎn)子磁鏈模型的仿真研究
按照式(5)基于電流模型的Kalman濾波器及其迭代算法,對(duì)一臺(tái)1.1kW、4p的異步電機(jī)進(jìn)行了仿真研究。異步電機(jī)的參數(shù)為:R=7.6Ω,R=4.5Ω,L=0.020H, L=0.033H,L=0.451H。仿真研究分兩種情況,分別為(1)異步電機(jī)開環(huán),電源為標(biāo)準(zhǔn)的正弦波形;(2)異步電機(jī)矢量控制系統(tǒng)。作為比較,對(duì)式(1)的Kalman濾波器轉(zhuǎn)子磁鏈模型亦進(jìn)行了仿真。
4.1 異步電機(jī)開環(huán)、電源為正弦波的仿真結(jié)果
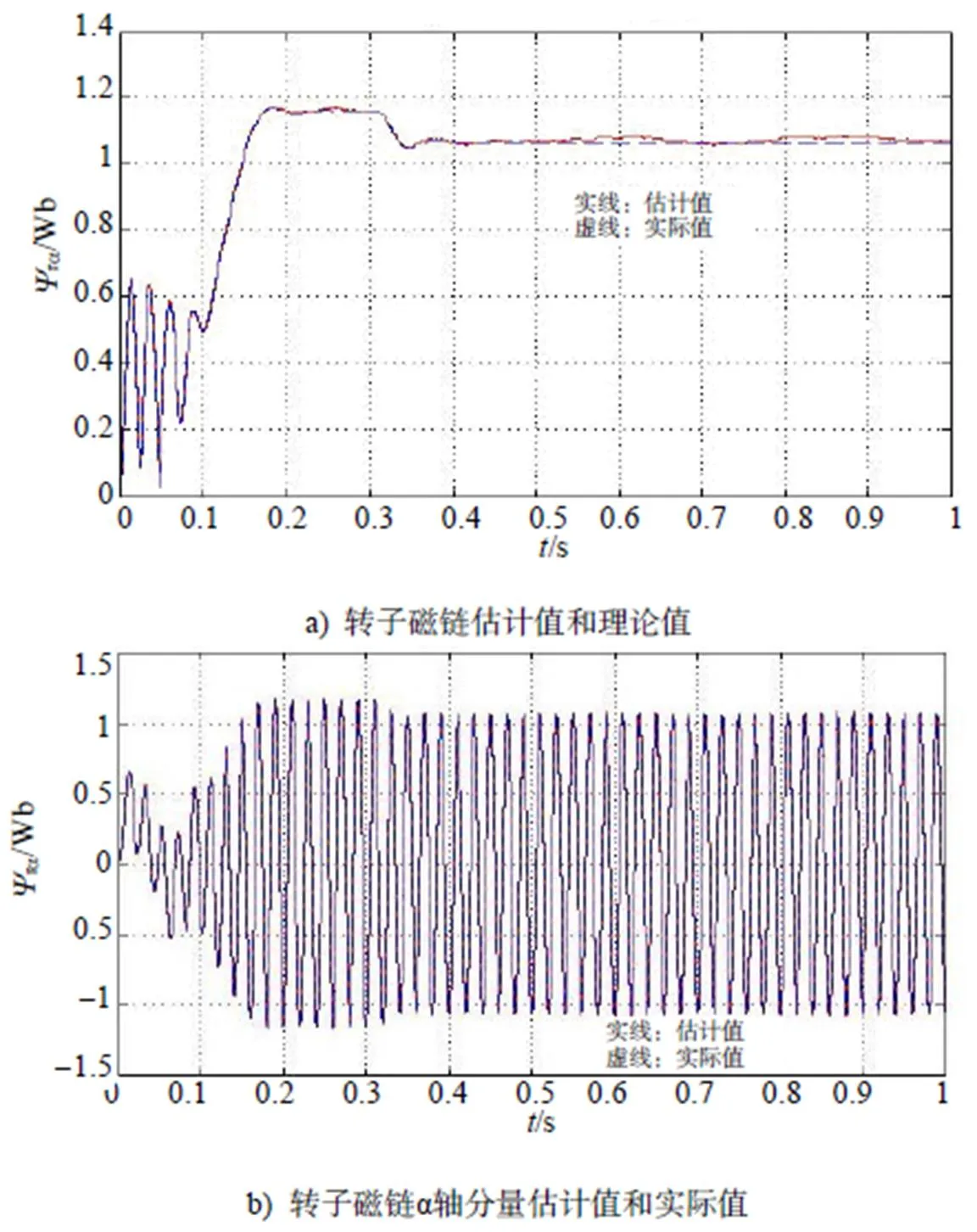
先建立了異步電機(jī)的仿真模型,給定三相電壓為220V、50Hz。空載起動(dòng)0.3s后負(fù)載轉(zhuǎn)矩增加到7.55N×m。圖1給出了仿真結(jié)果。圖1a)為轉(zhuǎn)子磁鏈幅值的估計(jì)值和實(shí)際值(理論值);圖1b)轉(zhuǎn)子磁鏈α軸分量的估計(jì)值與實(shí)際值(理論值)。圖1c)和d)分別為不考慮和考慮白噪聲時(shí)的定子α相電流波形。圖1d)在圖1c)上疊加了一個(gè)均值為零、方差為0.5的白噪聲。
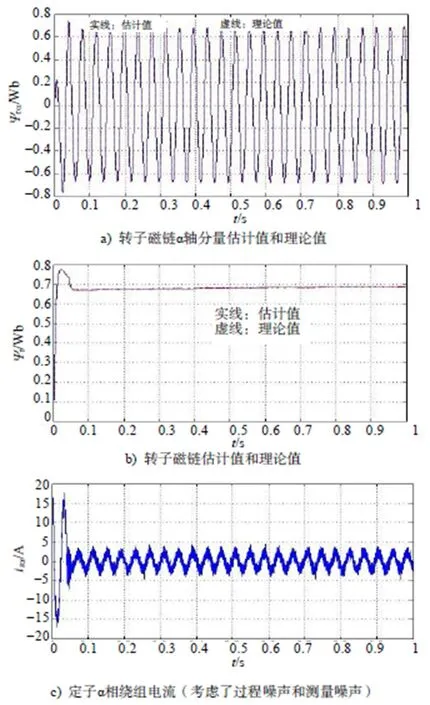
為了驗(yàn)證基于電流模型的Kalman濾波器轉(zhuǎn)子磁鏈模型的效果,圖2給出了相同條件下基于全階模型的Kalman濾波器轉(zhuǎn)子磁鏈模型的仿真結(jié)果。其中圖2a)為轉(zhuǎn)子磁鏈α軸分量的估計(jì)值和實(shí)際值(理論值),圖2b)為轉(zhuǎn)子總磁鏈幅值的估計(jì)值和實(shí)際值。
比較圖1a)-b)和圖2,兩者吻合度較好,觀測(cè)精度接近。
4.2 異步電機(jī)矢量控制系統(tǒng)的仿真結(jié)果
建立了異步電機(jī)轉(zhuǎn)速、磁鏈雙閉環(huán)的矢量系統(tǒng)并對(duì)其進(jìn)行磁鏈觀測(cè)仿真研究,其中轉(zhuǎn)子磁鏈給定為0.693Wb,負(fù)載轉(zhuǎn)矩為1.981N×m,轉(zhuǎn)速給定值為712r/min。同樣,仿真中,在定子電流上疊加了一個(gè)均值為零、方差為0.5的白噪聲。仿真結(jié)果顯示,磁鏈的估計(jì)值與理論值誤差很小,幾乎是重合的。仿真結(jié)果見圖3。

圖2 基于全階模型的Kalman濾波器轉(zhuǎn)子磁鏈模型仿真結(jié)果
5 結(jié)論
本文提出了一種基于電流模型的Kalman濾波的轉(zhuǎn)子磁鏈觀測(cè)模型。仿真研究結(jié)果顯示,這種觀測(cè)器模型與基于異步電機(jī)全階模型的Kalman濾波轉(zhuǎn)子磁鏈觀測(cè)模型估計(jì)精度相近。可見本文提出的基于電流模型的Kalman濾波器轉(zhuǎn)子磁鏈模型是有效的,由于狀態(tài)方程的維數(shù)下降,因此更適宜于在線實(shí)時(shí)估計(jì)。
[1] 翁海清. 雙PWM三電平異步電機(jī)磁場(chǎng)定向調(diào)速系統(tǒng)的魯棒控制[D].清華大學(xué),2001.
[2] 李永東. 交流電機(jī)數(shù)字控制系統(tǒng)[M]. 北京:機(jī)械工業(yè)出版社,2002.
[3] G. C. Verghese, S. R. Sanders. Observers for flux estimation in induction machine[J]. IEEE Trans. on Transactions on Industry Applications, 1988, 35(1): 85-94.
[4] Mario Marchesioni. A simple approach to flux and speed observation in induction motor drives[J]. IEEE Trans. on IE, 1997, 44(4): 528-535.
[5] 蘇位峰.異步電機(jī)自抗擾矢量控制調(diào)速系統(tǒng)[D].博士學(xué)位論文,清華大學(xué),2004.4.
[6] 王桂榮, 李太峰. 基于SVPWM的PMSM矢量控制系統(tǒng)的建模與仿真[J].大電機(jī)技術(shù), 2012, (2): 9-12.
[7] 王愛元, 凌志浩. 考慮鐵耗的永磁同步電動(dòng)機(jī)矢量控制系統(tǒng)的優(yōu)化[J].大電機(jī)技術(shù), 2009, (5): 29-32.
[8] M. S. Grewal, A. P. Andrews. Kalman filtering: theory and practice[M]. Englewood Cliffs, N.J.: Prentice-Hall, 1993.
[9] D. J. Atkinson, P. P. Acarnley, J. W. Finch. Observers for induction motor state and parameter estimation[J]. IEEE Transactions on Industry Applications, 1991, 27(6): 1919-1927.
[10] C. Caruana, G. M. Asher, K. J. Bradley, et al. Flux position estimation in cage induction machines using synchronous HF injection and Kalman filtering[J]. IEEE Transactions on Industry Applications, 2003, 39(5): 1372-1378.
[11] 胡俊達(dá). 基于自適應(yīng)轉(zhuǎn)速判斷觀測(cè)器的異步電機(jī)轉(zhuǎn)差頻率型矢量控制系統(tǒng)的研究[J]. 大電機(jī)技術(shù), 2004, (2).
[12] 趙鑫, 李國(guó)良, 李興廣, 等.抽水蓄能電站靜止變頻器轉(zhuǎn)子位置檢測(cè)[J]. 大電機(jī)技術(shù)2014, (6): 70-75.
[13] 年曉紅, 王堅(jiān), 李祥飛,等.基于感應(yīng)電機(jī)定子磁鏈U-N模型的速度自適應(yīng)辨識(shí)方法[J]. 中國(guó)電機(jī)工程學(xué)報(bào),2006,26(24):159-163.
[14] 姜建國(guó),曹建中,高玉明. 信號(hào)與系統(tǒng)分析基礎(chǔ)[M]. 北京:清華大學(xué)出版社,1994.
Rotor Flux Linkage Observer of Kalman Filtering Based on Current Model
Chen Feihong1, Wu Jie1, WANG Bulai2, WANG Tian-lei3
(1. Jiangmen Jiangling Motor Electric Co., Ltd., Jiangmen 529020, China; 2. College of Information Engineering, Wuyi University, Jiangmen 529020, China.; 3. Shanghai Institute of Technology, Shanghai 201400, China)
This paper proposed a novel method of rotor flux linkage observer of Kalman filtering based on current model to investigate vector control system of induction motors. This paper designed a rotor flux linkage observer of Kalman filtering based on current model on a sample of 1.1kW, 4p induction motor. Also a rotor flux linkage observer of Kalman filtering based on full-order model was designed as comparison. Studies show that the difference of estimation precision between these two methods is small. So this method is valid and feasible. Considering the lower order, so rotor flux linkage observer of Kalman filtering based on current model is more suitable for on-line estimation.
current model; Kalman filtering; rotor flux linkage; observer; simulation
TM343
A
1000-3983(2017)02-0076-05
2016-12-23
陳飛鴻(1959-),1982年畢業(yè)于廣東廣播電視大學(xué)電子專業(yè),一直從事電機(jī)的設(shè)計(jì)開發(fā)工作,主要研究方向:電機(jī)設(shè)計(jì)、控制與制造工藝,工程師,總工程師。

科學(xué)技術(shù)部科技型企業(yè)中小企業(yè)創(chuàng)新基金(12C26214405183);上海市教育委員會(huì)資助(04FB07);五邑大學(xué)2015年度青年科研基金(2015zk12)。
審稿人:李金香
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
