礦用電動輪自卸車柴發機組并網方案設計
2017-10-13 21:33:38陳雪亮姜鈺梁
船電技術 2017年3期
陳雪亮,姜鈺梁
?
礦用電動輪自卸車柴發機組并網方案設計
陳雪亮,姜鈺梁
(武漢船用電力推進裝置研究所,武漢 430064)
以礦用電動輪自卸車上使用的雙柴發機組為例,提出了柴發機組并網的兩種方案。在分析兩種方案利弊的同時,詳細介紹了直流母線并網的設計。此設計可為多柴發機組并網提供解決方案。
柴發機組 直流母線 并網
0 引言
隨著電力電子技術被廣泛地應用于各個工業領域。非公路用大型運輸車輛傳動技術發生了日新月異的變化,電動輪自卸車作為其中一員,隨著傳動系統的整體升級改造,主要配件國產化的趨勢勢不可擋。本文主要針對國內某新型多輪傳動礦用電動輪自卸車的系統特點進行分析,提出了自卸車雙柴發機組并網發電的兩種具體實現方案,并對其進行分析比較。
1 設計背景簡介
某礦用電動輪整車具備兩臺柴發機組,并采用16×16多輪全動力結構,按軸線從前向后的方式分為5組。其中,第一軸線的車輪無動力輸出,只起到導向作用;第二、四軸線的牽引電機由A母線供電;第三、五軸線的牽引電機由B母線供電。當兩柴發機組同時工作,出于系統需求,要實現兩發電機間的負荷均衡,并保證整車動力的平衡輸出。
由于孤立電網中,發電機的有功功率、無功功率、功率因數取決于負載,所以調節發電機勵磁,既可以改變發電機的有功功率,又可以改變發電機的無功功率[1]。故采用并網的方式,將所有負載看做一個整體,由兩個柴發機組同時為所有牽引電機供能,經由兩個勵磁調節器間的通信來調整兩個柴發機組的輸出,以此來實現整車輸出總功率的均衡分配[2]。
2 交流并網方案
2.1 交流并網結構介紹
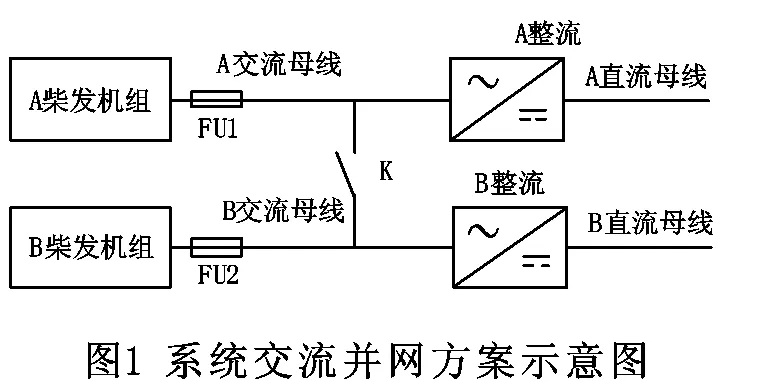
系統結構如圖1所示,兩個柴發機組輸出端分別裝有2個熔斷器(FU1、FU2),再經過整流裝置分別為A、B機組牽引電機供電。其中,A、B交流母線可以通過母聯開關K實現交流并網;A、B直流母線電氣上隔離。
交流母線并網運行必須具備如下條件:
1)電壓大小一致,波形相同;
2)相位相同;
3)頻率相同;
4)相序一致。
以上四個條件需同時滿足。如果任何一個條件不滿足,將在發電機之間產生短路環流,造成發電機繞組過熱,甚至燒毀。故在并網之前,需要對2臺發電機的輸出電壓進行嚴格監控,并防止人為誤操作對整車系統造成惡劣的影響。
2.2 交流母線并網具體實現方案
將兩臺發電機輸出電壓調節到符合并聯條件后,通過母聯開關K3實現并網。其中,發電機輸出的電壓值由發電機勵磁調節器控制;發電機輸出電壓頻率通過柴油機調速器EFC對柴油機轉速控制來實現;發電機輸出電壓波形由發電機負載決定,本系統中僅需考慮整流負載引起的發電機輸出波形畸變;發電機輸出電壓相序由發電機廠家在制造時決定,并保證發電機輸出電纜的正確接線。
方案的具體實現:
將兩臺柴發機組正確接線,并校好相序;
啟動一號柴發機組,使其正常工作在額定電壓、額定頻率下;
啟動第二號柴發機組,將已投入運行的一號機組做為基準,對二號機組進行調節。其中,輸出電壓頻率通過改變發動機轉速來進行調節;輸出電壓大小通過改變發電機勵磁來進行調節。
等待兩臺發電機的大小、頻率和相位一致時,閉合母聯開關K,實現交流母線并網。
其中,并網條件是否已達成可通過電壓表、轉速/頻率表等測試儀表來觀察。
3 直流母線并聯方案
3.1 直流并網結構介紹
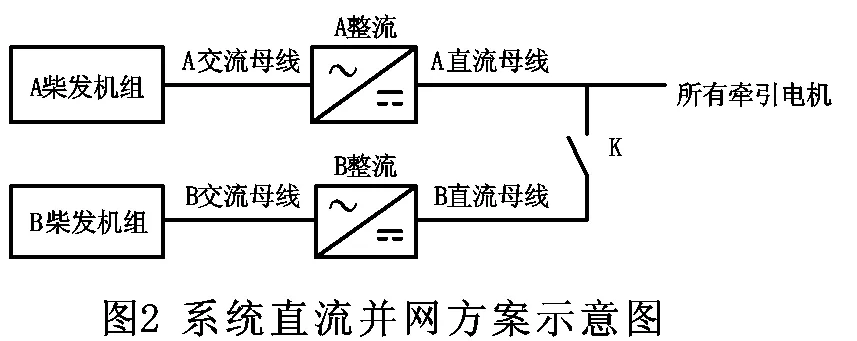
系統結構如圖2所示,兩個柴發機組輸出經過整流裝置共同為所有牽引電機供電;A、B直流母線可以通過母聯開關K實現直流并網。其中,A、B交流母線電氣上隔離。
為了減小系統運行時的電壓波動,并且在負載需要周期性峰值電流時,系統可以短暫提供較大的電流來維持穩定輸出,系統中存在較大容值的直流支撐電容。故在兩直流母線并聯時,A、B直流母線的電壓差不宜過大,否則易造成支撐電容的損毀[3]。故在并網之前,需要對兩組直流母線之間的電壓差進行嚴格監控,并適當增加硬件安全保護措施,防止因控制信號收到干擾導致的誤操作對整車系統造成惡劣的影響。
3.2 直流母線并網具體實現方案
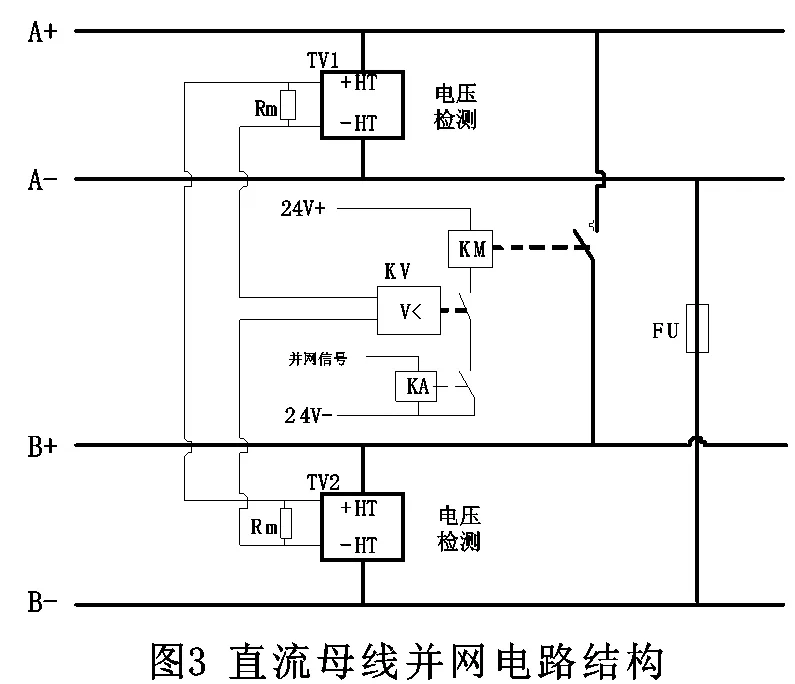
直流母線并網電路結構如圖3所示,A+和A-、B+和B-之間分別裝有電壓檢測器TV1、TV2,TV1和TV2連接至電壓比較繼電器KV,A+和B+母線之間安裝直流接觸器KM,并網控制繼電器KA和KM連接,A-和B-母線之間安裝保護用熔斷器FU。為防止KM在兩組直流母線電壓值相差過大時誤導通,采用直流母線電壓比較環節以保證器件的安全運行:將兩組直流母線電壓傳感器TV1、TV2的采樣值接入電壓比較繼電器KV中,整車發送并網信號至KA,當且僅當A、B直流母線電壓差值在允許值以內,比較繼電器KV閉合,此時直流接觸器KM導通,系統實現直流母線并網。
4 母線并聯方案比較
方案一:對于系統而言,增加設備較少,主要操作由勵磁調節器和整車控制器來實現,但是對控制精度的要求較高,對司機提出了更高的操作要求,且由于發電機輸出繞組不隔離,在實際使用過程中產生的風險較高。方案二:將發電機和整流裝置看做一個整體,控制簡單。其中,發電機輸出繞組相互隔離,不存在環流問題,無需考慮兩臺發電機的電壓、頻率、相位、相序關系[4]。
5 結論
基于以上分析及說明,經與甲方協商決定采用直流母線并聯的方案。系統具備試驗條件后,在甲方聯調試驗現場,開展了該部分的調試試驗。針對整車系統的實際情況,選取1200 rpm、1500 rpm、1700 rpm、1900 rpm四個特征轉速點進行并聯負載試驗,試驗結果表明:兩機組基本可以做到負荷均衡,功率/電流偏差均可以控制在5%以內。實驗結果達到預期值,為整車可靠運行提供了強有力的保障。
[1] 黃建明. 直流模塊式光伏并網控制系統設計與實現[J]. 電工電能新技術, 2014, (04): 26-31.
[2] 章心因,吳在軍,郝思鵬,程桂林. 風力發電直流并網及變速直流發電系統運行控制研究[J]. 電測與儀表,2012,10:60-64.
[3] 王常騏,郭家虎. 風電場直流并網的拓撲結構研究[J].電網技術, 2014, (11):3065-3071.
[4] 王賽一,華月申.基于微網的分布式風光儲系統并網典型方案研究[J]. 上海節能, 2016,(03):160-170.
Grid-Connected Plan of Diesel Generator Set for Motor Wheel Mine Dumper
Chen Xueliang, Jiang Yuliang
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM314
A
1003-4862(2017)03-0019-02
2016-09-15
陳雪亮(1984-),男,工程師。研究方向:控制理論與控制工程專業。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30