無需預先測速的靶場彈丸落點定位算法實現
2017-10-13 22:04:27李鵬宇車錄鋒鄭春雷
電子與信息學報 2017年2期
李鵬宇 車錄鋒 鄭春雷
?
無需預先測速的靶場彈丸落點定位算法實現
李鵬宇*①②車錄鋒①鄭春雷③
①(中國科學院上海微系統與信息技術研究所微系統技術國家級重點實驗室 上海 200050)②(中國科學院大學 北京 100049)③(中國科學院上海微系統與信息技術研究所 上海 200050)
該文針對現有靶場彈丸落點定位系統需要提前測量波速,實際應用復雜,定位誤差大等問題,提出一種無需預先測速的彈丸落點定位算法,此算法采用米字型傳感器陣列,米字型陣列又可以分解成2組五元十字陣,通過來波方向(DOA)算法預先估計波速,然后把波束估計值代入到達時間差算法(TDOA)方程中計算初始位置,再把初始位置和估計波速作為參數代入到泰勒級數展開算法中,收斂定位。由于不需要預先人工測量波速,減少了波速測量誤差,波速和定位位置都是在迭代算法中逐步收斂求精的,所以該算法提高了彈丸落點定位精度,減少了實際應用的復雜性。仿真算法也驗證了此方法的可行性,在距離定位陣列1000 m范圍內迭代算法都是收斂的。
彈丸落點定位;到達時間差算法;泰勒級數
1 引言
彈丸落點定位是武器性能測試的重要步驟,也是打靶演習中驗證武器打擊精度的重要環節,當前靶場試驗主要采用人工大面積搜索、被動聲學、以及光電經緯儀、地應力波測量等手段,其中人工搜索和光電經緯儀的定位精度差,效率低,已經不能滿足現代化演習試驗的需要;被動聲學法雖然在精確定位領域取得比較大的進展,但是受環境和天氣的影響較大,在野外惡劣環境下的定位會產生很大延遲;地應力波測量[1,2]同聲學和光學傳感器定位手段相比,具有系統使用簡單可靠,受環境和天氣影響較小等優點,地應力波測量法[1,2]主要采用加速度傳感器感應地應力波,通過TDOA傳統算法計算定位,但是在做定位計算前必須提前測量地波波速,由于靶場地理環境復雜,不同爆炸點到達傳感器的地波波速并不相同,采用固定波速測量定位算法[3,4]對于不同炸點的定位誤差很大,這也是導致地應力波測量方法不能廣泛在大型靶場應用的主要原因之一。
針對上述問題,本文提出了一種無需預先測速的彈丸定位地應力波測量算法,通過采用米字型陣列結合DOA算法[5,6],對初始位置和波速進行了合理估計,并把每次爆炸的地波波速作為TDOA方程組中的變量,采用泰勒級數展開算法[7,8]快速收斂,從而得到很高的地波波速和爆炸點定位精度,解決了由于固定波速導致的定位偏差大的問題。
2 定位原理和算法
彈丸落點定位探測系統由爆炸源,加速度傳感器陣列,信號處理設備組成。彈丸爆炸時,沿地面會激發縱波(P波),橫波(S波)和瑞利波(R波)[9,10],由于本系統為遠距監測[11],P波和S波能量較小,在未到達傳感器位置時已經衰減到和噪聲相當,而R波能量很高,可以到達傳感器的位置,所以加速度傳感器陣列主要監測R波到時。由個加速度傳感器組成檢測陣列,如圖1所示,9個加速度傳感器同步接收R波到時,再把波到時間數據通過無線通信方式傳輸給信號處理設備,信號處理設備根據TDOA(到達時間差)[12,13]算法就可以計算出彈丸落點的位置。
2.1 定位模型
一般彈丸定位陣型包括五元十字陣[14]、菱形陣[15]、L型陣、直線陣等,各種陣型都有優缺點,其中五元十字陣被認為是定位效果最好的陣型,但是五元十字陣中如果有一個傳感器故障,或者到時數據有很大偏差,陣型就不完整,導致不能達到良好的定位效果,所以本設計采用了圖1所示的米字型陣列,由9個傳感器組成檢測陣列,1為圓形中心,2~9為相隔的傳感器,原型陣列里面優選1, 2, 4, 6, 8或者1, 3, 5, 7, 9傳感器組成2組五元十字陣,米字型陣列的優勢是根據實際采集的數據情況能夠靈活地變換陣型,可以利用2個五元十字陣的波到時刻數據情況求取初始位置和波速,然后進行迭代計算,9個傳感器可以任意兩兩組成TDOA方程[16,17],多個定位方程組成方程組可以提高泰勒級數展開迭代算法的收斂速度。
圖1 米字型檢測陣列示意圖
圖1中,信號處理設備在實驗前發送定位信標給所有傳感器,當傳感器接收到定位信標后,即調整各自的RTC時鐘完成時間同步,爆炸點的R波陸續達到米字型陣列中的每個傳感器,傳感器分別記錄到達波峰時刻。各傳感器把波到時刻數據通過無線通信的方式發送給信號處理設備,信號處理設備收集到所有傳感器的波到時刻數據,組成TDOA方程組如式(1):
2.2 定位算法
利用陣位中2~9傳感器節點和中心傳感器節點的波到時刻差,通過DOA(到達角度)算法[18]和五元十字陣求解方程,得到初始位置和波速估計。
(1)初步估計震動的方位角,找到最先接收到震動波的傳感器,其到達時刻為。
(2)米字型陣列的節點角度數組為:=(0,45,90, 135,180,225,270,315);
(3)到達時刻最小值的節點就是最先接收到震動波的傳感器。

(3)
(4)
式(1)的泰勒級數展開公式為

忽略2階以上的分量后,整理為
(6)
(8)

式中,為TDOA測量值的協方差對角矩陣,的選擇可以決定迭代算法的收斂速度。
(10)
(11)
本迭代算法的結束條件設置為rmse(最近2次結果差值)小于0.01 m,結果精度為1 cm,迭代次后的結果為實際位置的逼近值。
3 仿真誤差分析
根據式(1)得出的定位精度主要受震動波速,陣列半徑,時延誤差和目標距離影響[19,20]。其中陣列半徑可以精確測量得到,震動波速受地理環境影響較大,時延誤差每次測量都不一樣,為隨機分布。所以影響定位精度的主要因素為波速,時延誤差的影響。
仿真條件:在matlab仿真環境下,設定在塑性粘土中地波波速范圍為500~1000 m/s,陣列半徑為50~100 m,時延誤差為100 μs和1 ms,目標距離為-500~1000 m。假定其中2個影響因素已知,分別仿真另2個因素對計算誤差的影響,找出影響定位誤差最大的因素,即
(1)假定時延誤差和目標距離已知,計算不同波速和陣列半徑對定位誤差的影響;
(2)假定陣列半徑和波速已知,計算不同時延誤差和目標距離對定位誤差的影響;
(3)假定時延誤差和波速已知,計算不同目標距離和陣列半徑對定位誤差的影響。
3.1 距離精度分析
不同波速,陣列半徑下的距離誤差如圖2所示。設定目標點距離=1000 m,時延誤差= 100 μs。
圖2 R=1000 m,時延誤差100 μs的距離誤差
從圖2中可以得出,距離誤差隨著波速的增大而增大,隨著陣列半徑的增大而減小,90 m以上的陣列半徑,波速500~900 m/s的情況下,距離誤差小于10 m,而60 m以下的陣列半徑,則距離誤差受波速影響很大。
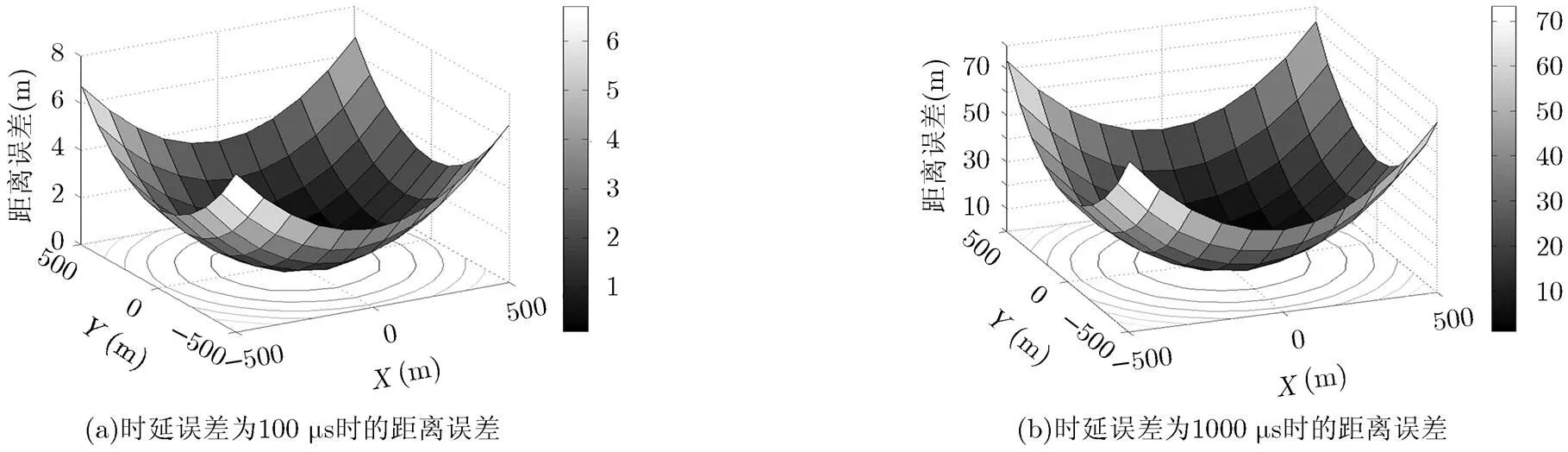
圖3 r =100 m, v=500 m/s的距離誤差
從圖3中可以得出,距離誤差隨著目標距離的增大而增大,隨著時延誤差的增大而增大,陣列半徑,波速的情況下,距離誤差受影響很大,為1 ms時,500 m距離的定位誤差可以達到70 m,在100 μs的情況下,500 m距離的定位誤差可以控制到10 m以下,所以傳感器的采樣頻率至少應該大于10 kbps。
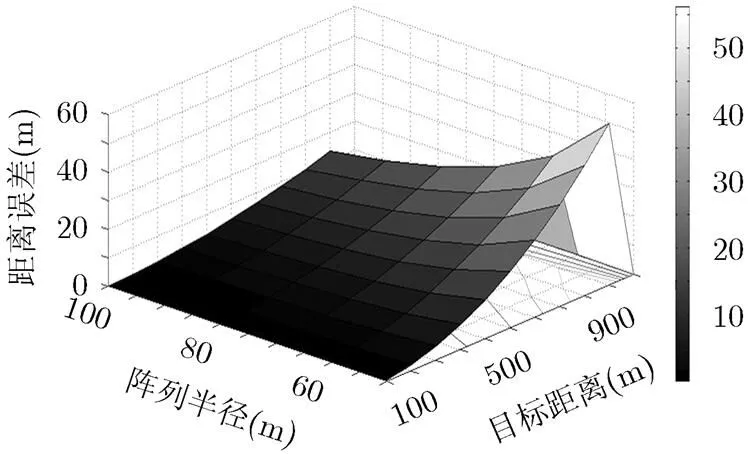
圖4 v=500 m/s,時延誤差100 μs的距離誤差
從圖4中可以得出,距離誤差隨著目標距離的增大而增大,隨著陣列半徑的增大而減小,90 m以上的陣列半徑,波速500 m/s的情況下,距離誤差都小于5 m,而60 m以下的陣列半徑,距離誤差受距離影響很大。綜上所述,距離誤差受陣列半徑,目標距離,波速和時延誤差影響很大,選擇大的陣列半徑可以抵消波速和目標距離的影響,時延誤差的影響可以通過提高采樣頻率和傳感器陣列同步精度來改善。因此,本實驗采用陣列半徑為=100 m,采樣頻率為10 kHz,傳感器同步時鐘精度在10 μs。
4 炮彈落點實驗
4.1 波速測量結果對比
提前測速需要2個傳感器A和B,相隔一定距離,分別計算P波到時,最后算出波速為
本實驗設置測速裝置距離=100 m,實驗次數取10。米字型陣列=100 m,距離中心傳感器距離= 200~1000 m。
比較米字型陣列波速計算結果和A, B傳感器波速測量結果如表1所示。
通過迭代方程計算出來的平均速度值為575 m/s,計算結果方差很小,而人工測量誤差在8 m左右,誤差為隨機分布,結果方差很大。測試對比發現,無需測速的彈丸定位方法在波速估計上要比提前測速更準確,因為提前測速需要人工計時,必須進行多次計算結果平均,而且必須事先制造震動源,在實際應用時非常不方便,因此無需測速的彈丸定位方法在工程應用上更加實用和準確。
4.2 無需測速和提前測速方法定位結果對比
試驗設置:不斷改變定位陣列和靶心的距離,提前測速和無需測速采用同一個陣列,提前測速需要每次把步驟4.1測量的波速代入到定位方程中,然后計算定位,無需測速方法只需要把歷史波速代入到方程中逐步求精來迭代定位,比較兩種方法和實際落點的誤差值如圖5所示。
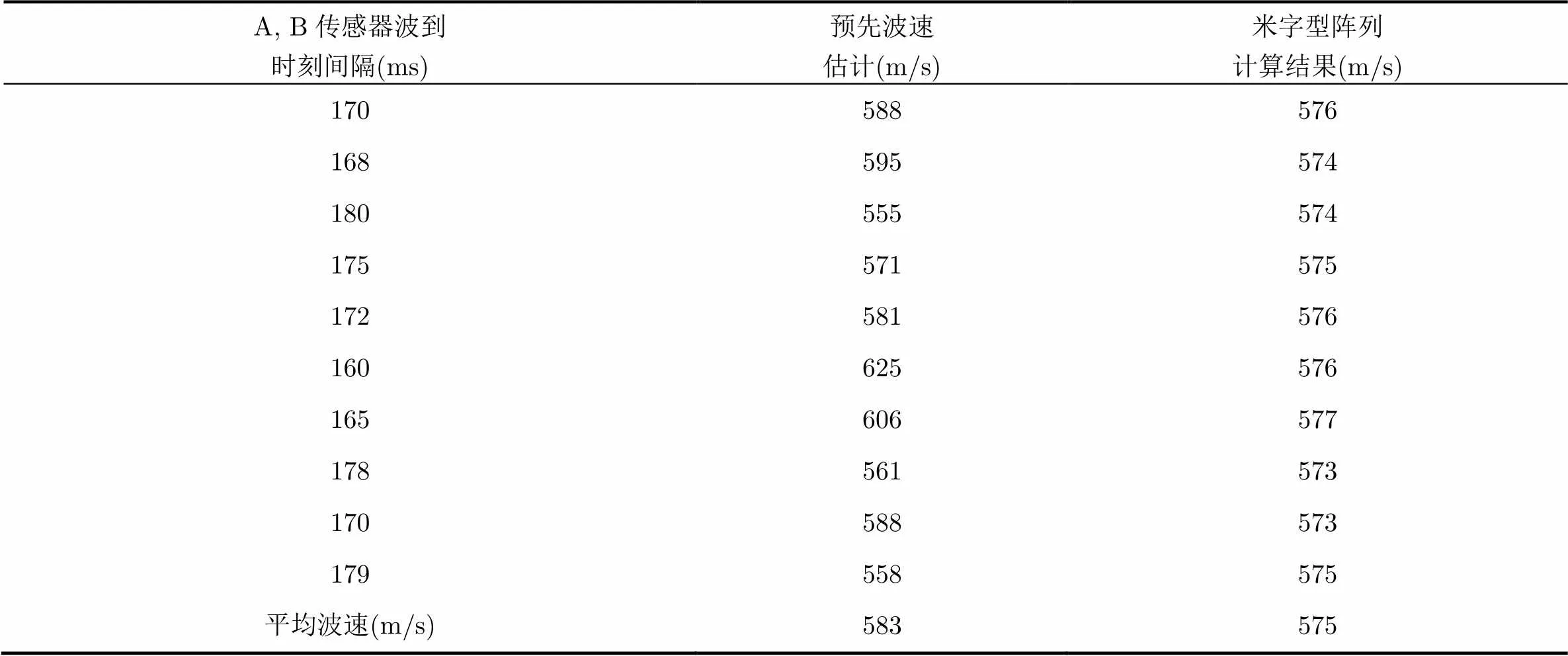
表1 提前測速方法采集數據
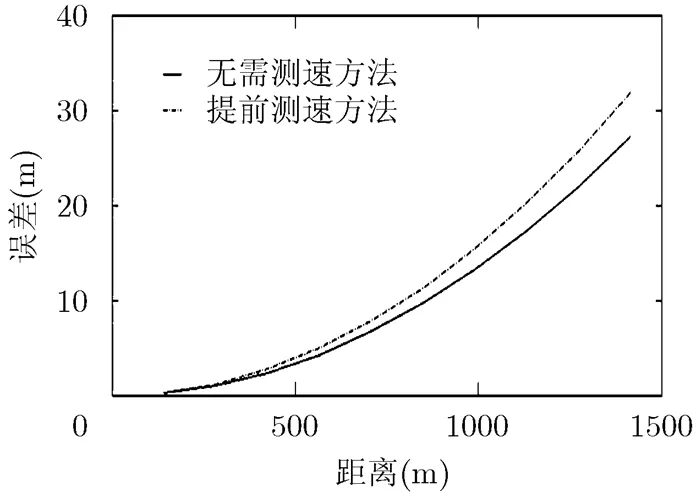
圖5 r =100 m,時延誤差為100 μs的距離誤差比較
無需測速方法由于把震動波速代入到迭代算法中,逐步求精,所以結果更精確,定位誤差也相對于提前測速方法更小,提前測速方法預先利用2個傳感器,通過時差法估算震動波速,震動波速作為常數代入到迭代算法中,誤差也同時代入到算法中,最后導致定位的隨機誤差增大,而且不同方向的爆炸點由于地理環境的不同導致每次爆炸產生的震動波速不盡相同,所以震動波速作為常數參與每次的定位運算本身就會產生很大的誤差。如圖5所示,陣列半徑= 100 m,時延誤差=100 μs的情況下,無需測速迭代方法和提前測速迭代方法的定位誤差比較,在距離的范圍內,提前測速迭代方法比無需測速迭代方法定位誤差高出。
5 結論
本文提出了一種無需測速的靶場彈丸落點定位迭代算法的設計實現,進行了算法仿真設計和實驗應用。通過對比預先測速迭代算法的定位誤差,得到了比較理想的測試結果,波速估計和定位精度優于預先測速的迭代定位算法。本算法提高了靶場彈丸落點定位系統的定位精度,省略了預先測速的繁瑣步驟,使得靶場彈丸定位系統可以達到真正實際應用的目的。
[1] 朱偉勇. 基于MATLAB的微地震震源定位的研究與實現[D]. [碩士論文], 浙江工業大學, 2011. doi: 10.7666/d.y1921166.
ZHU Weiyong. Based on the MATLAB micro earthquake source positioning of the research and implementation[D]. [Master dissertation]. Zhejiang University of Technology, 2011. doi: 10.7666/d.y1921166.
[2] 董隴軍, 李夕兵, 唐禮忠, 等. 無需預先測速的微震震源定位的數學形式及震源參數確定[J]. 巖石力學與工程學報,2011, 30(10): 2059-2067.
DONG Longjun, LI Xibing, TANG Lizhong,. A method for identifying outlier signals for microseismic event based on arrival time difference[J]., 2011, 30(10): 2059-2067.
[3] 馬瑞恒, 錢漢明, 榮英佼, 等. 五元十字陣用于2-D遠場目標精確定位的關鍵因素分析[J]. 彈箭與制導學報, 2005, 25(2): 574-577. doi: 10.3969/j.issn.1673-9728.2005.02.186.
MA Ruiheng, QIAN Hanming, RONG Yingjiao,. Analysis of the key factors impacting on precise localization of the 2-D far-field target using a planar five-element circle array[J].,,, 2005, 25(2): 574-577. doi: 10.3969/j.issn.1673-9728. 2005.02.186.
[4] ALLEN R V. Automatic earthquake recognition and timing from single traces[J]., 1978, 68(5): 1521-1532.
[5] 楊俊峰, 張丕狀. 基于DTOA/DOA和牛頓迭代法的震源定位方法研究[J]. 地震研究, 2013, 36(3): 324-329. doi: 10.3969 /j.issn.1000-0666.2013.03.011.
YANG Junfeng and ZHANG Pizhuang. Research on seismic source localization method based on DTOA/DOA and Newton iterated algorithm[J]., 2013, 36(3): 324-329. doi: 10.3969/j.issn.1000-0666. 2013.03.011.
[6] DAI H C and COLIN M B. Automatic picking of seismic arrivals in local earthquake data using an artificial neural Network[J]., 1995, 120(3): 758-774. doi: 10.1111/j.1365-246X.1995.tb01851.x.
[7] 宋葉志. MATLAB數值分析與應用[M]. 北京: 機械工業出版社, 2014: 177-181.
SONG Yezhi. MATLAB Numerical Analysis and Application [M]. Beijing: China Machine Press, 2014: 177-181.
[8] Timothy Sauer. Numerical Analysis[M]. Fairfax: George Mason University, 2014: 205-210.
[9] 馬朝軍, 狄長安, 孔德仁, 等. 基于地震波的彈丸落點定位模型[J]. 四川兵工學報, 2012, 33(7): 20-26. doi: 10.3969/j.issn. 1006-0707.2012.07.008.
MA Zhaojun, DI Chang-an, KONG Deren,. Landing point location model based on seismic wave[J]., 2012, 33(7): 20-26. doi: 10.3969/j.issn. 1006-0707.2012.07.008.
[10] 李楠, 王恩元, 孫珍玉, 等. 基于到時差值的微震波異常信號識別方法[J]. 巖石力學與工程學報,2014, 33(8): 1644-1661. doi: 10.13722/j.cnki.jrme.2014.08.016.
LI Nan, WANG Enyuan, SUN Zhenyu,. A method for identifying outlier signals for microseismic event based on arrival time difference[J]., 2014, 33(8): 1644-1661. doi: 10.13722/j.cnki. jrme.2014.08.016.
[11] HAOHONG D U. The design of a new type of TDOA-based local space mouse[C], IEEE International Conference on Mechatronics and Automation, Beijing, 2015: 1755-1760. doi: 10.1109/ICMA.2015.7237751.
[12] GAMBI J M, RODRIGUEZ-TEIJEIRO M C, and GARCIA DEL PINO M L. Newtonian and post-Newtonian passive geolocation by TDOA[J].2016, 51: 18-25. doi: 10.1016/j.ast.2016.01.016.
[13] MENG Yufeng, XU Jiancheng, HUANG Yan,. Key factors of multi-station TDOA passive location study[C], International Conference on Intelligent Human-machine Systems and Cybernetics, Hangzhou, 2015: 220-223. doi: 10.1109/IHMSC.2015.190.
[14] GERSON S F and HAE Y K. Identification of pressed keys by time difference of arrivals of mechanical vibrations[J].,2016, 57(3): 93-105. doi: 10.1016/j. cose.2015.11.002.
[15] QU Xiaomei and XIE Lihua. An efficient convex constrained weighted least squares source localization algorithm based on TDOA measurements[J].,2016, 119(2): 142-152. doi: 10.1016/j.sigpro.2015.08.001.
[16] ZHONG Xionghu and HOPGOOD J R. A time-frequency masking based random finite set particle filtering method for multiple acoustic source detection and tracking[J]./,,,2015, 23(12): 2356-2370. doi: 10.1109/TASLP. 2015.2479041.
[17] ZHU Guohui, FENG Dazheng, XIE Hu,. An approximately efficient bi-iterative method for source position and velocity estimation using TDOA and FDOA measurements[J].,2016, 125(8): 110-121. doi: 10.1016/j.sigpro.2015.12.013.
[18] YIN Jihao, WAN Qun, YANG Shiwen,. A simple and accurate TDOA-AOA localization method using two stations [J].,2015, 23(1): 144-148. doi: 10.1109/LSP.2015.2505138.
[19] CANCLINI A, BESTAGINI P, ANTONACCI F,. A robust and low-complexity source localization algorithm for asynchronous distributed microphone networks[J]./,,,2015, 23(10): 1563-1575. doi: 10.1109/TASLP. 2015.2439040.
[20] UYSAL C and FILIK T. A joint detection and localization method for non-cooperative DS-SS signals[C]. IEEE Military Communications Conference, Tampa, FL, 2015: 523-528. doi: 10.1109/MILCOM.2015.7357496.
Landing Point Location Algorithm Without Velocity Measurement in Target Range
LI Pengyu①②CHE Lufeng①ZHENG Chunlei③
①(,,,200050,)②(,100049,)③(,,200050,)
To overcome the large errors and complexity of measuring the wave velocity of landing point location algorithm in target range, a method based on poisoning algorithm without velocity measurement is proposed. Nine accelerate sensors constitute pozidriv shaped array, which also consists of 2 sets of five-element cross array. DOA algorithm is used to pre-estimate the wave velocity, then the wave velocity as the initial parameter is set into the equation to calculate the initial position. Lastly, as the parameters the initial position and the velocity are set into the Taylor iterative algorithm to get the final location result. Because wave velocity need not to be measurement, measurement error can be reduced, wave velocity and position value can be calculated by iteration algorithm, so this algorithm makes the landing point location more simple, more accurate. The simulation verifies that this method is measurable, and the iterative algorithm is convergent in the range of 1000 meters.
Landing point location; Time Difference Of Arrival (TDOA) algorithm; Taylor series
TJ06
A
1009-5896(2017)02-0322-06
10.11999/JEIT160316
2016-04-01;改回日期:2016-08-25;
2016-10-21
李鵬宇 hotlipy@hotmail.com
李鵬宇: 男,1977年生,博士生,研究方向為無線通信、物聯網工程應用、加速度傳感器研究和應用開發工作.
車錄鋒: 男,1971年生,博士,研究員,博士生導師,主要從事微傳感器與執行器及其相關MEMS技術方面的研究.
鄭春雷: 男,1976年生,博士,研究員,主要從事物聯網協議和通信設備的研究工作.
