無刷直流電機變論域模糊PID控制系統的研究與仿真
2017-10-17 11:00:22李可可張孝杰
陜西科技大學學報 2017年5期
關鍵詞:規則
李 艷, 李可可, 張孝杰
(1.陜西科技大學 電氣與信息工程學院, 陜西 西安 710021; 2.陜西省農產品加工技術研究院, 陜西 西安 710021; 3.濮陽市自來水公司生產科, 河南 濮陽 451000)
無刷直流電機變論域模糊PID控制系統的研究與仿真
李 艷1,2, 李可可1, 張孝杰3
(1.陜西科技大學 電氣與信息工程學院, 陜西 西安 710021; 2.陜西省農產品加工技術研究院, 陜西 西安 710021; 3.濮陽市自來水公司生產科, 河南 濮陽 451000)
為了改善無刷直流電機的調速性能,針對常規PID在直流電機應用上存在響應速度慢、穩定性差等缺陷,研究了一種基于變論域思想的模糊PID控制方案.設計了一種二階模糊控制器,該控制器根據系統的控制需求實時調整伸縮因子,第一階模糊控制器利用伸縮因子改變第二階模糊控制器的論域,從而能夠根據直流電機的速度變化進行論域的伸縮變化.經過MATLAB仿真,結果表明:變論域自適應模糊PID控制直流電機時相對于PID控制和模糊PID控制具有無超調、響應速度快和良好的魯棒性能的優點.
變論域; 模糊PID; 直流電機; 調速
Abstract:In order to improve the performance of brushless DC motor,for conventional PID in DC motor applications defects slow response speed, poor stability,the paper research a kind of fuzzy PID control scheme based on ideas and variable region, a second order fuzzy controller was designed,the controller according to the control requirement of system real time adjust the scaling factor,the first order fuzzy controller changes the domain of the second order fuzzy controller by using the dilation factor,thus,the expansion of the field can be carried out according to the change of the speed of the DC motor.Through MATLAB simulation,The results show that the adaptive fuzzy PID control and variable region DC machine compared with PID control and fuzzy PID control has no overshoot,quick response speed and good robust performance.
Keywords:variable universe; fuzzy PID; DC motor; control of motor speed
0 引言
隨著電力電子和永磁材料的快速發展,無刷直流電機在各行各業中的應用得到迅速推廣,因此人們對直流電機的魯棒性和快速性提出了較高的要求.直流電機速度控制大多采用傳統PID控制方案[1,2],PID控制方案具有原理簡單、穩定性好等優點.但是由于無刷直流電機調速系統具有一定的非線性,傳統的PID控制會出現響應速度慢、穩定性差等缺點,為了提高直流電機的調速性能,智能控制受到越來越多的關注.于是近年來自適應模糊PID控制方案被用來提高直流電機的調速性能[3],相比傳統PID控制效果有了明顯的提升,基本上解決了常規控制的控制精度問題,但是基于模糊規則設計的模糊控制器是基于專家經驗的一種非線性控制器,模糊控制缺乏準確的隸屬度函數和調整方法,隸屬度函數和控制規則一旦設定確定,在系統的調節過程中就不能任意改動,針對直流電機這種時變、非線性系統[4],模糊控制規則只是在調節剛開始的過渡過程中起作用,而且誤差較小時PID參數往往不易調節,因而模糊PID控制的自適應能力有限.
為了解決上述問題,本文在自適應模糊PID控制方案基礎上,引入了變論域的思想,形成一種可變論域的有自適應能力的模糊PID控制策略,即變論域模糊PID控制策略[5-6].通過論域調整改善模糊PID控制器參數調整精度和范圍,實現論域隨著系統的控制需求進行響應的伸縮,使得初始設置的規則變為適應系統隨時變化的規則,根據誤差不斷的調整,使得該控制方案在直流電機調速的應用上具有比自適應模糊PID控制具有更好的自適應能力、穩定性.目前,變論域模糊控制器設計常用的方法是選擇合適的論域伸縮因子實現變論域[7],但是伸縮因子的函數形式與函數中的參數選擇較為繁瑣,且函數形式選擇的合理性與系統控制性能密切相關,為了克服這些不足,本文設計了二階模糊控制器并把變論域二階模糊控制器應用在無刷直流電機的速度控制上[8,9],對常規PID、模糊PID和變論域模糊PID控制方案在MATLAB環境下進行仿真比較,結果顯示本文設計的變論域模糊PID控制方案在直流電機的速度調節上具有較好的響應速度、穩定性.
1 直流電機數學模型
直流電機驅動系統如圖1所示[10,11].在分析過程中,為了方便,假設磁路不飽和,不計算渦流和磁滯損耗.

圖1 直流電機驅動系統圖
在額定勵磁條件下,直流電機電壓平衡關系式為:

(1)
式(1)中:R和L分別為電機的電樞繞組和電樞電感,U為電樞電壓,i為電流,e為電機電樞反電勢,e=keω,ω為電機的角速度,ke為反電動勢常數.
力矩平衡關系式為:

(2)
式(2)中:J為轉動慣量,Tl為總負載轉矩,Te為電磁轉矩,且Te=kli,kl為電磁轉矩系數,B為粘性阻尼系數.
兩式聯立可以得到式子為:

(3)
通過拉氏變換可得到傳遞函數為:

(4)

2 模糊PID原理
常規PID的思想是根據設定輸入與實際輸出的偏差,按比例、積分和微分的函數關系進行計算.在直流電機控制中,常用的是增量式PID,其原理式為:
ΔU(k)=KPΔe(k)+KPe(k)+KD[Δe(k)-
Δe(k-1)]
(5)
其中,KP為比例系數,KI為積分函數,KD為微分函數.
模糊PID控制是利用模糊規則,根據偏差e和偏差變化率ec的大小實時在線地調整PID的三個參數KP、KI和KD,以達到使整個系統具有良好的動靜態性能的目的,其控制系統結構圖如圖2所示.
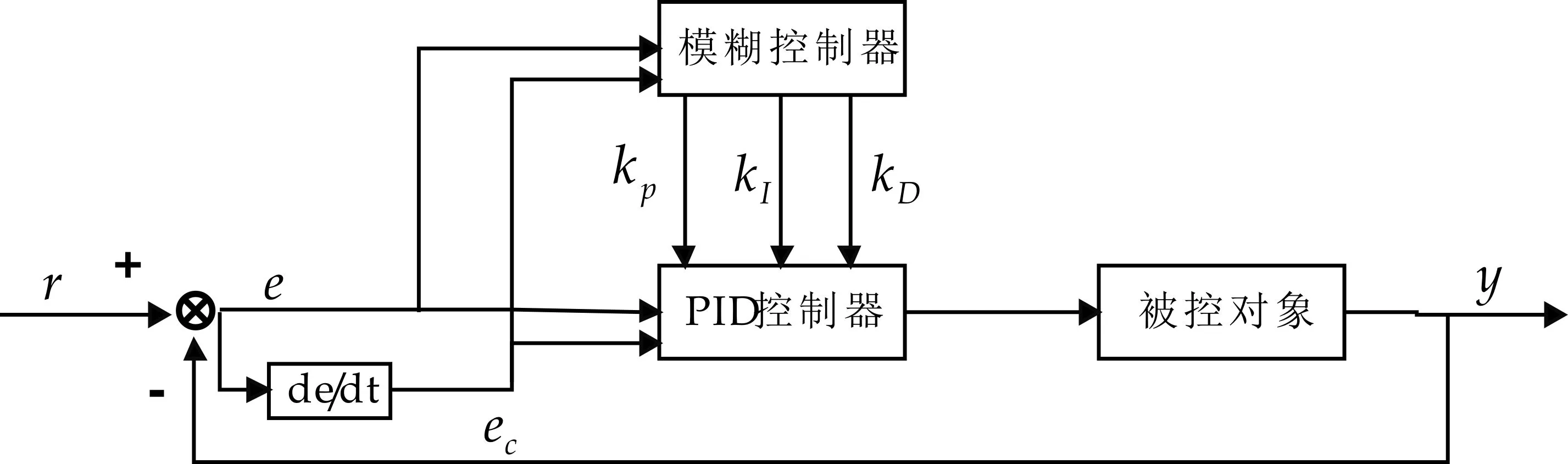
圖2 模糊PID控制系統結構框圖
在模糊PID控制中,模糊控制器一旦確定,其結構就不能隨意改動,因而適應能力就降低了,當模糊控制器的論域范圍過小時,容易造成輸入量超出范圍,導致控制器失控;當論域范圍過大時,控制器不能使用所有的規則,同樣不能使模糊控制器發揮應有的效能.
3 變論域模糊PID原理
變論域的思想是在模糊控制規則不變的前提下,變量的模糊論域在初始范圍的基礎上,根據誤差及誤差變化率的變化進行相應的伸縮變化,當誤差增大時論域擴展;當誤差變小時論域壓縮,相當于局部增加了控制規則,從而提高控制精度.


圖3 論域變化情況圖
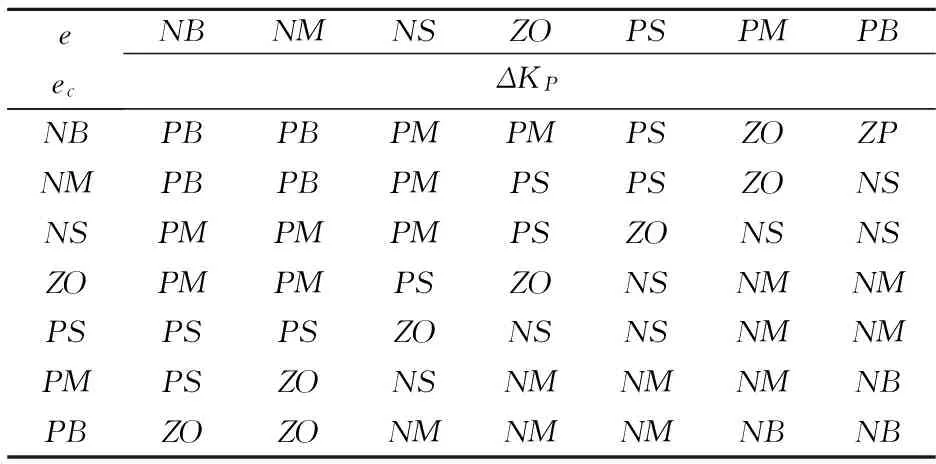
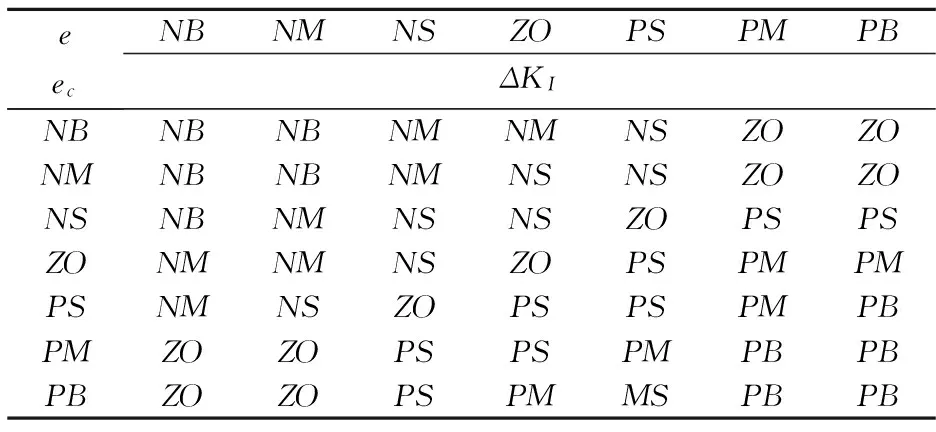
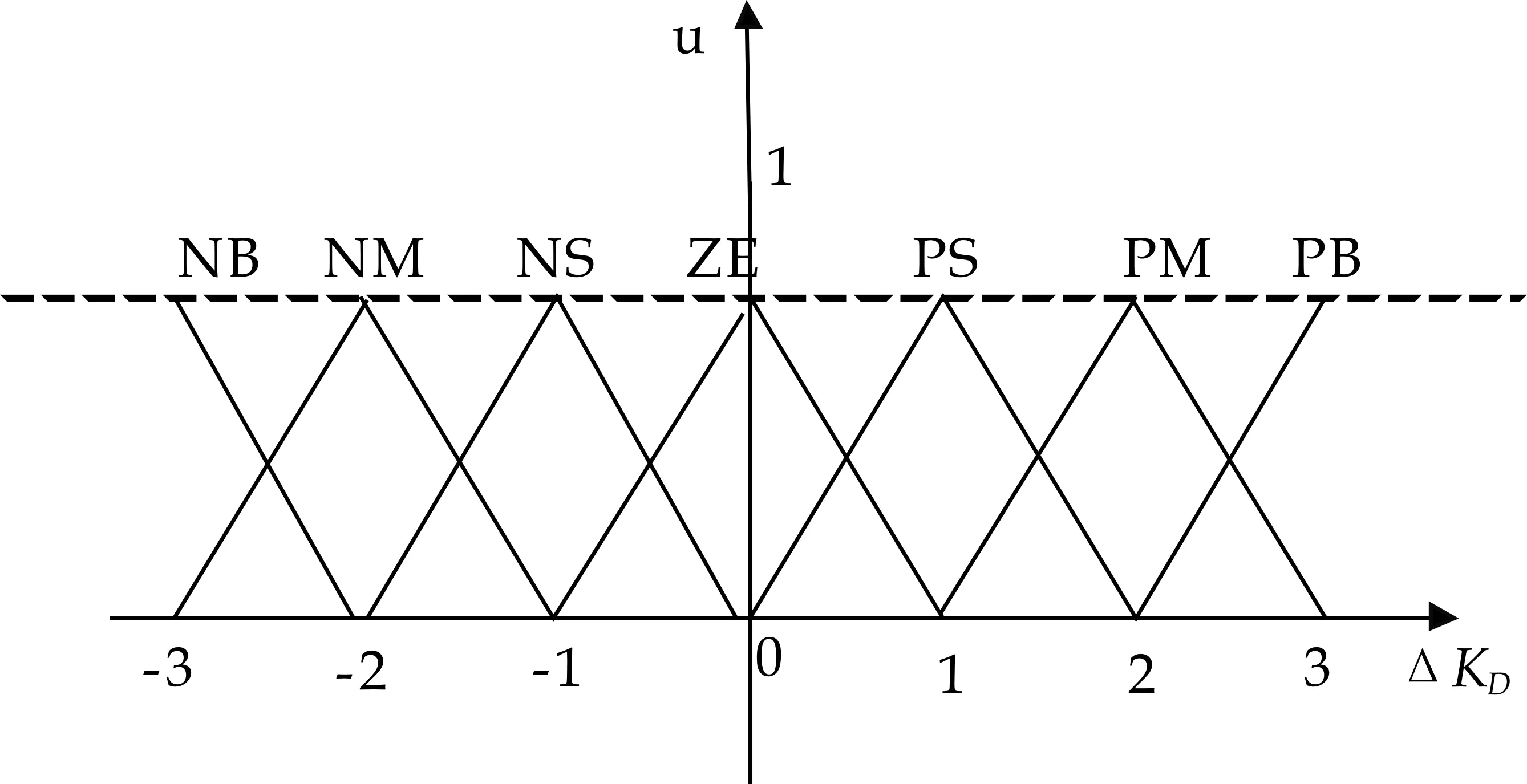
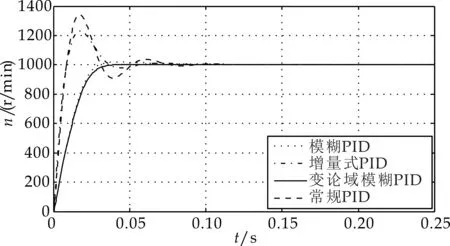
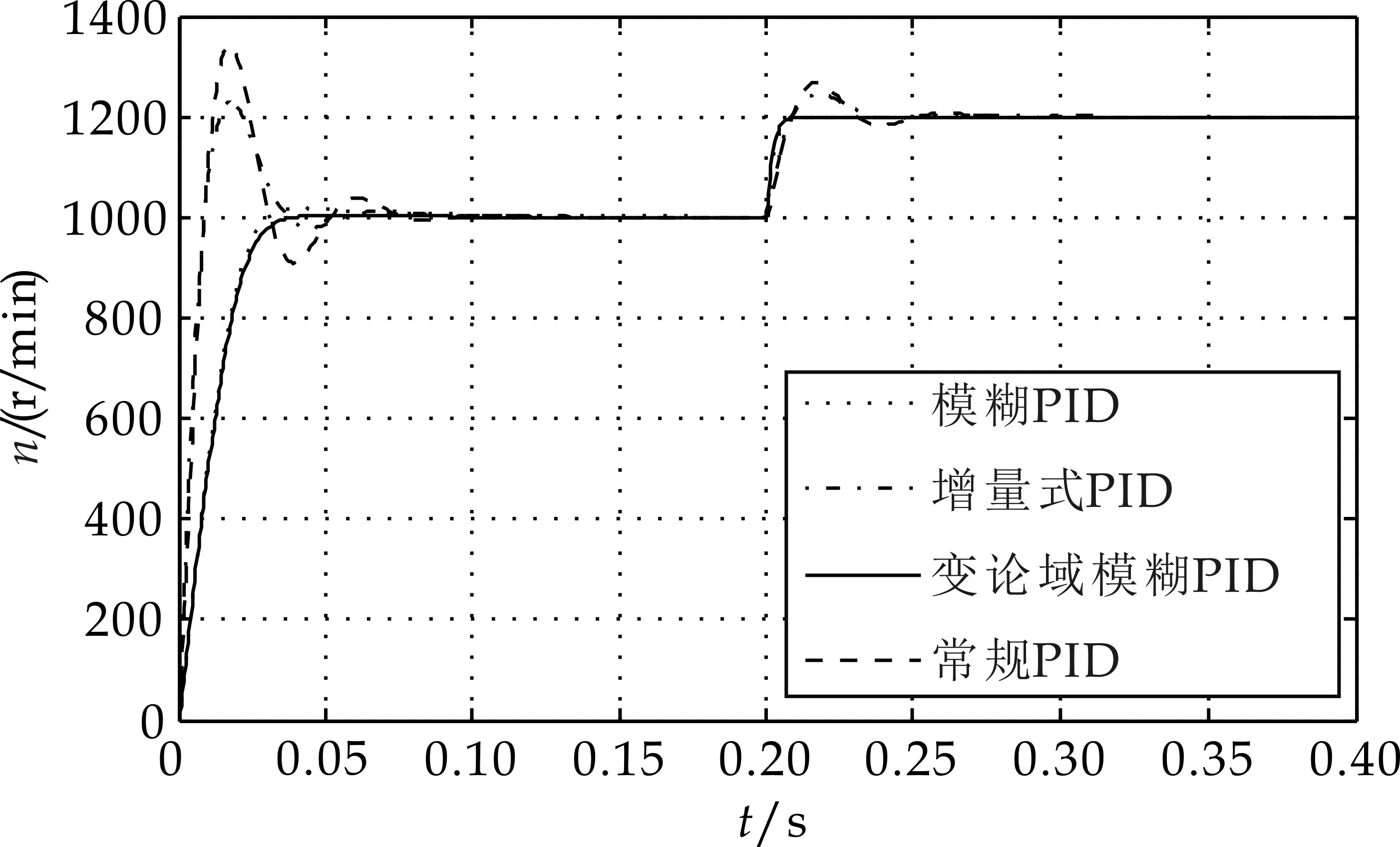
假設一個雙輸入單輸出的模糊控制系統的輸入變量為e、ec,輸出變量為y,論域分別為X1=[-EE],X2=[-ECEC],Y=[-UU],A={Ai}、B={Bi}和C={Ci}(1≤i≤n,其中i是整數,表示為模糊控制規則數)分別為論域X1、X2和Y以基元組為基礎的模糊劃分[12],ei、eci、yi分別表示Ai、Bi、Ci的峰點,其中-E ei(k)=α[e(k)]ei(0) (6) eci(k)=α[ec(k)]eci(0) (7) y(k+1)=Y[e(k),ec(k),k]= (8) 由上式可以推導出變論域模糊控制的離散表達式為: y(k+1)=γ[y(k)]· Y{e(k)/α[e(k)],ec(k)/β[ec(k)]}= Bi{ec(k)/β[e(k)]}·yi(0) (9) 由此可以看出基于變論域的模糊控制是一種自適應的模糊控制,這種自適應的模糊控制是以論域的變化應以誤差的變化,此時的控制器降低了對隸屬函數的形狀以及模糊控制規則和論域的依賴,簡化了模糊控制器的設計,只需要掌握控制系統大致的變化方向,形成一組控制規則就可以.變論域模糊PID控制就是利用變論域理論與模糊PID控制原理相結合,通過變論域自適應律的調整改善模糊PID的參數調整精度和范圍,則可以克服常規模糊PID控制自適應能力有限的缺點,這種模糊控制器能實時跟蹤控制系統的動態變化,提高系統的自適應能力. 4.1 變論域模糊PID控制器設計 變論域模糊PID控制器實質就是在常規模糊PID的基礎上增加了伸縮因子,通過伸縮因子改變論域的大小進而對模糊PID參數進行調整,一般用基于函數模型的伸縮因子來控制論域的范圍,所以伸縮因子的選擇直接決定了變論域模糊PID控制器的性能,伸縮因子選擇的合適與否對控制效果有著較大影響,而且函數中的參數的選擇較為繁瑣,因此本設計中的變論域模糊 PID控制器選擇雙模糊控制器,其控制器的控制系統結構框圖如圖4所示. 圖4 變論域模糊PID控制系統結構框圖 其控制過程為:模糊控制器1通過控制對象的反饋值與設定值的偏差和其變化率進行論域調整,得到伸縮因子λ(0<λ<1),然后通過伸縮因子作用在模糊控制器2上,實時在線的改變模糊控制器2的論域大小,最后通過PID控制對參數KP、KI和KD進行在線調整,從而系統獲得更好的控制效果[14,15]. 4.1.1 模糊控制器1的設計 選擇直流電機轉速的偏差e和偏差變化率ec作為模糊控制器1的輸入量,伸縮因子λ作為輸出,模糊子集均為:B、M、S,分別代表大、中、小,輸入量論域都為[0 6],各語言值均選擇三角形的隸屬度函數,模糊控制器1的隸屬度函數曲線為圖5所示. 圖5 隸屬度函數曲線圖 因為伸縮因子需要輸入量相對較大時使模糊控制器2的論域變大,在輸入量較小時使模糊控制器2的論域變小,所以模糊控制規則設計如表1所示. 表1 λ模糊控制規則 4.1.2 模糊控制器2的設計 模糊控制器2選擇其偏差e和偏差變化率ec作為輸入量,模糊語言變量分別為E和EC,輸出量分別為PID的參數的修正值ΔKP、ΔKI和ΔKD,其相應的模糊語言變量分別為KP、KI和KD,模糊子集均為:NB、NM、NS、ZO、PS、PM和PB,分別代表負大、負中、負小、零、正小、正中和正大,PID參數的模糊校正控制表如表2~4所示. 表2 ΔKP模糊控制規則表 表3 ΔKD模糊控制規則 表4 ΔKI模糊控制規則 此系統的輸入為e、ec,輸出為KP、KI和KD,e和ec的量化論域值均為[-3 3],修正值ΔKP、ΔKI和ΔKD的量化論域值分別為[-0.3 0.3]、[-0.06 0.06]和[-3 3],各語言值均選擇三角形的隸屬度函數,如圖6~8所示. 其中,變論域模糊PID的結構與模糊PID的結構在模糊PID部分是相同的,只是在模糊PID控制器前面增加了一個模糊控制器,實現了模糊變論域的實時調整,模糊PID的參數調整算式為:KP=KP0+ΔKP、KI=KI0+ΔKI、KD=KD0+ΔKD.KP0、KI0和KD0分別為PID的設定初始值,ΔKP、ΔKI、ΔKD分別為模糊PID控制器的輸出,也就是PID參數的調整值,得到的KP、KI和KD經過模糊推理和去模糊化最后得到系統的輸出,即為式子: 圖6 ΔKp隸屬度函數 圖8 ΔKD隸屬度函數 4.2 系統仿真 在Simulink環境下,建立基于變論域模糊PID控制器的無刷直流電機調速系統仿真模型[16],建立的變論域模糊PID控制系統結構框圖如圖9所示.分別對常規PID、增量式PID、模糊PID和變論域模糊PID進行仿真,并進行比較. 圖9 變論域模糊PID控制器仿真圖 無刷直流電機給定轉速n=1 000 (r/min)情況下,圖10位電機轉速在常規PID、增量式PID、模糊PID和變論域模糊PID在MATLAB仿真平臺下的仿真圖,其中常規PID的參數kp=6,ki=0.15,kd=0.01,增量式PID的參kp=6,ki=0.12,kd=0.01.從圖10可以看出,PID控制和增量式PID控制的超調量較大,分別為σ1%=33.3、σ2%=24,調節時間ts1=0.08 s,上升時間tr1=0.01 s,模糊PID控制的超調量為σ3%=1.3且調節時間ts2=0.06 s,變論域模糊PID控制的效果優于PID控制和模糊PID控制,調節時間較小,時間為ts3=0.04 s,且基本沒有超調,具有更快的響應速度. 圖10 直流電機轉速比較圖 圖11是在0.2 s時系統負載突然改變的仿真圖,通過仿真圖可以看出PID控制和增量式PID控制在負載改變的情況下,PID控制出現較大的震蕩,增量式PID也出現震蕩,但優于常規PID控制,其中模糊PID控制和變論域模糊PID控制由于具有較強的自適應能力,在負載改變時能夠較快的恢復,具有良好的抗干擾能力和穩態性能. 圖11 負載改變下的曲線比較圖 圖12是在0.2 s時調整直流電機轉速下的仿真圖,通過仿真圖可以看出PID控制和增量式PID控制在轉速改變的情況下,PID控制和增量式PID響應速度慢、適應能力弱,其中模糊PID控制和變論域模糊PID控制由于具有較強的自適應能力,在轉速改變的情況下能夠較快的適應,具有較快的響應速度. 圖12 速度改變下的曲線比較圖 通過以上的分析,本文所設計的變論域模糊PID控制器對于轉速的改變和外部負載的改變具有較快的響應速度,抗干擾能力強,穩定性好等特點,具有較強的自適應能力. 在使用二階模糊控制器的變論域模糊PID控制方法過程中,不僅對KP、KI和KD進行自適應調整,還可以對伸縮因子進行實時改變來對模糊推理的論域進行調節,使控制器具有較好的控制效果,相對于PID控制和模糊PID控制,其適應能力和抗干擾能力明顯增強,響應速度加快.為今后分析該類電機性能和對其控制策略的研究提供了新的方法,具有較好的研究價值. [1] 周 陽,周美嬌,殷 戈.直流電機調速系統設計及PID參數整定[J].電子科技,2016,29(5):153-157. [2] 張紅濤,閆 林,徐曉輝,等.基于單片機PID算法的無刷直流電機控制系統的研究[J].現代電子技術,2007(10):52-54. [3] 劉慧博,王 靜,吳彥合.無刷直流電機模糊自適應PID控制研究與仿真[J].控制工程,2014,21(4):583-587. [4] 付子義,邢 陽.無刷直流電機的變論域模糊自適應控制[J].計算機仿真,2015,32(5):336-339. [5] 李紅偉.變論域模糊控制的無刷直流電機控制系統[J].控制工程,2010,17(5):599-602. [6] 陳兵偉,廖衛強.應用變論域模糊PID的直流電機調速系統[J].集美大學學報,2011,16(3):207-211. [7] 譚兵文,李春文.幾種變論域伸縮因子選擇方法的比較[J].科學技術與工程,2013,13(4):908-911. [8] 曹玉麗,史儀凱,袁小慶,等.自平衡機器人變論域模糊PID控制研究[J].計算機仿真,2013,30(2):347-350. [9] 李明愛,焦利芳,焦俊飛.自平衡兩輪機器人的分層模糊控制[J].控制工程,2009,16(1):80-82. [10] 張 琛.直流無刷電動機原理與應用[M].北京:機械工業出版社,2004. [11] 李鐵才,杜坤梅.電機控制技術[M].哈爾濱:哈爾濱工業大學出版社,2000. [12] 李洪興.模糊控制的插值機理[J].中國科學,1998,28(3): 259-267. [13] 裘智峰,黃 燈,桂衛平,等.基于變論域插值模糊PID控制系統的研究與應用[J].儀器儀表學報,2008,29(11):2 435-2 440. [14] 李洪興.Fuzzy-控制器的本質與一類高精度Fuzzy控制器的設計[J].控制理論與應用,1997,14(6):868-872. [15] 李 震,陳 以,韓元杰.可變論域Fuzzy-PID控制器的設計與仿真[J].自動化技術與應用,2004,23(12):29-32. [16] 劉金琨.先進PID控制MATLAB仿真[M].2版.北京:電子工業出版社,2007. 【責任編輯:蔣亞儒】 ResearchandsimulationofvariableuniversefuzzyPIDcontrolsystemforbrushlessDCmotor LI Yan1,2, LI Ke-ke1, ZHANG Xiao-jie3 (1.College of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China; 2.Shaanxi Research Institute of Agricultural Products Processing Technology, Xi′an 710021, China; 3.Production Department of Puyang Water Supply Company, Puyang 451000, China) 2017-08-28 陜西省科技廳科學技術研究發展計劃項目(2013K07-28); 陜西省教育廳專項科研計劃項目(14JK1094) 李 艷(1972-),女,四川仁壽人,副教授,碩士生導師,研究方向:工業自動化與智能控制 2096-398X(2017)05-0162-06 TM33 A
4 變論域模糊PID控制器設計與仿真








5 結論
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42