基于幅度相位估計相干系數與幅度相位估計融合的超聲成像方法*
2017-10-18 08:14:02孟德明陳昕和曉念陳思平
生物醫學工程研究 2017年1期
關鍵詞:信號
孟德明,陳昕,和曉念,陳思平
(1.深圳大學生物醫學工程學院, 深圳 518060;2.醫學超聲關鍵技術國家地方聯合工程實驗室,深圳 518060;3.廣東省生物醫學信息檢測與超聲成像重點實驗室,深圳 518060;4.桂林電子科技大學,桂林 541004)
1 引 言
在醫學超聲成像廣泛使用的延時疊加 (delay-and-sum,DAS)方法是一種與數據無關的非自適應算法,導致成像空間分辨率較低,對比度較差[1-2]。自適應最小方差(minimum variance,MV)波束形成算法最早由Capon提出[3],其基本思想是通過保持期望方向上的增益不變,使陣列輸出能量最小化,從而獲得最優加權向量,是醫學超聲中應用最多的自適應波束形成方法[4-5]。由于超聲數據具有高相關性、寬帶等特點,計算協方差矩陣時會出現奇異矩陣,導致采用MV算法難以求得準確的加權向量。Synnev?g[6]等改進了MV算法,利用空間平滑技術使主瓣信號和旁瓣信號解相關;Li[7]等提出了對角加載方法,通過獲得穩健的協方差矩陣估計來提高MV算法的穩健性。Asl[8]等采用前后向空間平滑法估計協方差矩陣,改善了成像對比度;Als等人[9]將相干系數引入到最小方差波束形成算法中,在保持MV算法高分辨率的基礎上,進一步抑制了旁瓣及雜波信號,但成像整體亮度有所降低。Li等[10]提出基于最小方差的相干系數,并將該算法用于高幀率超聲成像中,提高了成像對比度。
幅度相位估計( amplitude and phase estimation,APES)算法最初應用于時域信號的頻譜分析[11],該算法具有能夠準確估計信號幅度和成像穩健性的優點,近年來已應用到醫學超聲成像中[12]。與MV算法相比,APES算法以分辨率有所降低為代價,更準確的估計幅度和提升算法穩健性。劉昊霖等[13]提出一種融合幅度相位估計和相干系數波束形成算法,該算法結合了相干系數對旁瓣信號抑制能力強和APES算法幅度估計準確的優點,抑制噪聲和干擾,改善成像分辨率和對比度。
本研究結合文獻[10]提出一種基于APES相干系數,并將基于APES相干系數引入到APES波束形成方法中, 在保證APES算法優點基礎上,進一步提高了成像對比度和分辨率。
2 算法
2.1 信號模型和最小方差波束形成
假設-個由M個等間距的陣元組成線陣換能器,對于近場內散射目標,波束形成后的輸出表達式為:

(1)
其中k表示時間系數,xd(k)=[x1(k-Δ1),…,xM(k-ΔM)]T為聚焦延時后的信號,w(k)=[w1(1),…,wM(M),]T為加權向量,Δi為各通道延時。當w(k)為全1向量時,波束形成方法退化為傳統DAS算法。
最小方差波束形成算法的基本思想是在期望信號增益不變的情況下,通過使陣列的輸出能量最小化的方法,尋找最優的加權向量w。 其數學表達式為[9]:

(2)
其中,Ri+n是干擾加噪聲的協方差矩陣,a為方向向量,經過延時聚焦后,a表示為a=[1,1,…,1],由此可得加權矢量為:

(3)
(4)

2.2 幅度相位估計波束形成(APSE)
APES算法將M個陣元分割成M-L+1重疊子陣方法消除超聲信號相關性,其中每個子陣具有L個陣元。并通過求解一個約束最小二乘問題獲得加權向量W[13]:
(7)

(8)

(9)
2.3 融合高分辨率相干系數的APES算法
與MV算法相比,APES具有精確的幅度估計,但是成像分辨率有所降低。為了提高APES算法成像分辨率,本研究將高分辨率相干系數引入到APES算法中,利用信號的相干性原理提高APES算法成像分辨率。
相干系數是衡量回波信號相干性的指標,其表達式為[5]:
(10)
其中k為時間系數。將CF的相干部分(分子部分)用最小方差波束形成的輸出代替,從而得到高分辨率相干系數(HRCF)[12]。
(11)
本研究調整了HRCF系數計算,用幅度相位估計波束形成的輸出取代CF的相干部分得到基于幅度相位估計的高分辨率相干系數。
(12)
利用HRCFAPES對APES波束形成的輸出進行加權計算,得到波束形成的最終輸出為:
(13)
3 仿真結果及討論
為了研究本文所述算法的性能,利用Field II 對點射目標和斑散射目標的仿真實驗。采用傳統的DAS算法、MV算法,APES算法、APES-CF算法和APES-HRCFAPES算法成像并對比。所有仿真均采用定點聚焦發射和動態聚焦接收的工作模式,采用陣元數96的線陣換能器,設置中心頻率f0為3.5 Mhz,系統采樣頻率fs為100 Mhz,陣元中心間隔半個波長,聲速為1 540 m/s。信號仿真時加入了60 dB的高斯白噪聲。
3.1 點散射目標成像
目標散射點均勻分布在40~70 mm之間,縱向距離5 mm,相同深度散射點橫向距離2 mm,發射聚焦深度設置為55 mm,成像的動態范圍均設定為60 dB。圖1為不同方法對不同深度散射點的成像結果。

圖1點目標仿真成像結果
(a)DAS,(b)MV,(c)APES,(d)APES-CF,(e)APES-HRCFAPES
Fig1Imagingresultsofthepointtargets
從圖1中可以看出,DAS算法分辨率最差,橫向上相鄰兩點較難區分;與DAS算法相比,MV波束形成方法提高了分辨率,但旁瓣等級改善有限;APES算法主瓣變寬,分辨率有所下降;APES和基于APES的相干系數融合方法顯著的降低了旁瓣高度,特別是APES-HRCFAPES算法成像中,僅深度70 mm相鄰散射子出現了粘連現象,APES-HRCFAPES算法有最優的旁瓣電平壓縮效果。
為了更加直觀地說明不同算法對圖像質量的影響,圖2給出了點目標在55 mm處的橫向剖面圖。
從圖2可以看出, MV算法主瓣寬度最窄。APSE算法略優于DAS算法,將CF引入到APES算法中,利用信號的相干性加強了對旁瓣信號的抑制,APES-CF算法成像對比度遠優于MV算法。APES-HRCFAPES算法的主瓣寬度僅次于MV算法,旁瓣等級最低。
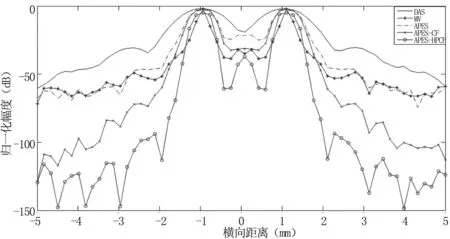
圖2深度55mm處點目標橫向對比
Fig2Lateralvariationofthepointtargetsatdepthof55cm
3.2 斑目標成像
斑目標設置半徑均為3 mm圓形區域,深度在35 mm處,發射聚焦設置為40 mm,成像的動態范圍均設定為80 dB,其他參數和點散射目標仿真的一致。
從圖3可以看出,由于DAS和MV算法的旁瓣抑制能力差,DAS和MV算法的圖像對比度很低(見圖3(a)、(b));從圖3(c)可見APES算法成像效果與MV算法近似;APES-CF有效抑制了旁瓣信號,提高了成像對比度;當將HRCFAPES引入到EAPES算法中時,進一步抑制了旁瓣信號,成像對比度高于其他算法。

圖3斑散射目標仿真成像結果
(a)DAS,(b)MV,(c)APES,(d)APES-CF,(e)APES-HRCFAPES
Fig3Simulatedimagesofthecystphantom

表1 斑目標成像對比度
本研究引入對比度(CR)[2]來直觀的評價不同波束形成方法的結果,其中對比度(CR)定義為中心區域的平均功率與背景區域的平均功率之差。
從表1可以看出,APES-HRCFAPES法的對比度(CR)優于其他算法。其次為APES-CF算法,最后依次為APES,MV和DAS算法。
3.3 聲速偏差的影響
由于人體組織的不均勻性,導致聚焦不準,從而影響成像質量。為了研究本文提出的算法在聲速偏差存在時的穩健性, 給出了速度偏差依次為0%,2%,5%,10%時各算法的成像結果,見圖4。聲速偏差導致主瓣變寬,旁瓣升高,成像分辨率和對比度降低,隨著聲速偏差增加,APES-HRCFAPES算法主瓣寬度逐漸接近APES-CF算法,但依然保持最窄主瓣寬度和最小的旁瓣幅度,表明在存在聲速偏差時,APES-HRCFAPES有較高的穩健性。
4 結論
本研究提出一種幅度相位估計與基于幅度相位估計的相干系數融合的波束形成算法。該算法利用APES算法幅度估計準確的優點,并在計算CF系數的相干部分時,用幅度相位估計波束形成的輸出來替代,形成一個高分辨率相干系數(HRCFAPES),有效的抑制旁瓣信號,在保證APES算法穩健性的基礎上,提高了APES算法成像分辨率。仿真成像結果表明:APES-HRCFAPES方法更好的提高成像的分辨率、對比度以及穩健性。該算法相對于APES算法和MV算法增加一種高分辨率相干系數的計算,所以算法的復雜度略高于APES算法和MV算法,并且計算HRCFAPES系數時用APES波束形成的輸出替代了分子部分,減少了求相干系數分子部分的加法運算,所以算法的復雜度略低于APES-CF算法。

圖4不同速度偏差下的各種成像對比
(a)DAS,(b)MV,(c)APES,(d)APES-CF,(e)APES-HRCFAPES
Fig4Beamformedimagesofpointtargetsatdifferentsoundvelocityerrors
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
