一種氣動四足直線運動的軟體機器人
2017-10-21 13:43:15保文珵
科技風 2017年8期
關鍵詞:設計
保文珵
摘 要:本文提出了一種四足直線運動的軟體機器人。首先,給出了基于氣體驅動的軟體機器人結構設計。然后,利用SolidWorks3D打印技術打印出軟體機器人身體的各個部位模具,采用的環氧樹脂橡膠材料進行填充從而獲得軟體機器人部件并并進行組合。最后,以針管為氣體動力來源,通過實驗實現了該軟體機器人直線運動。
關鍵詞:四足軟體機器人;氣動;3D打印
Abstract:A type of four-footed soft robot with line motion is presented using pneumatic in this paper., First of all, the structure of four-footed soft robot has been designed using gas driving.Secondly,the soft robots parts moulds are built based on SolidWorks and obtained by 3D printing technology.Then, the epoxy resin material is adapt to fill in order to obtain the soft robot parts and combine them. Finally the experiment result shows the robot can achieve liner motion by syringe suppling gases.
Key words:four-footed soft robot;Pneumatic;3D print
軟體機器人顧名思義就是一種通過研究軟體動物的外貌,從而進行仿制的一種新型機器人。這種機器人不是由剛性的材料所構成,而是由可以承受大應變的柔軟材料制作的,其目的就是為了讓這種機器人可以做到自由的彎曲,擁有極高的自由度以至于可以輕松適應任何環境。正是因為如此,這使得軟體機器人在軍事,救援,醫療等方面都有著廣泛的用途[ 1 ]。
目前,軟體機器人的研究仍處于起步階段,還沒有成熟的理論設計方法,大多都處于結構設計與驗證階段。文[2]仿照蠕蟲運動方式,設計了同時具有爬行、滾動、直立三種移動方式的軟體蠕蟲,并采用形狀記憶合金彈簧來進行驅動。文[3]以人體體內病患處精確用藥為背景,提出了膠囊類形的軟體機器人結構形式來實現藥物的投放,并利用薄膜材料,研制進行了相應的原理樣機,開展了初步的實驗。文[4]設計了多關節軟體機器人,每個關節采用以電流變液驅動元件,通過電流控制電流變液來實現蠕動,關節之間通過微閥連接。Obaji[ 5 ]設計了一個具有五指機械手,采用形狀記憶合金作為驅動元件,來控制握手的大小形狀實現了對水杯,圓球等物體的抓取。文[6]對目前軟體機器人的發展進行了總結,并指出目前軟體機器人的研究重點集中在結構構型的設計和驅動方式上。
本文提出了一種采用氣體驅動能夠實現四足行走的軟體機器人,并詳細給出了其制備過程。通過針管輸送氣體,實驗表面給四足不同氣壓驅動可實驗軟體機器人平面內直線移動。
一、四足軟體機器人的結構設計
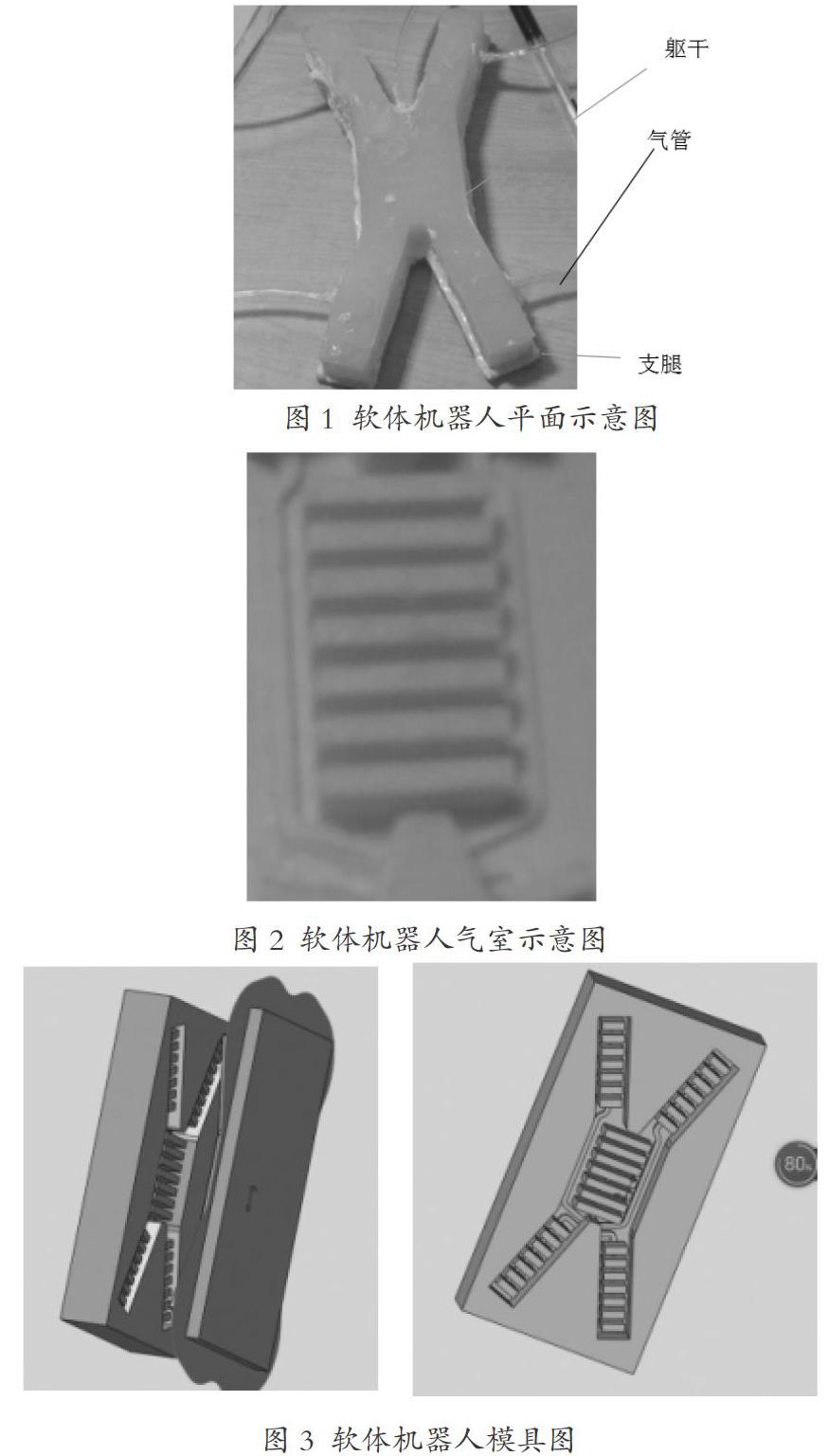
總體結構:軟體機器人的形態結構往往決定了這種機器人所能運動的范圍和運動的情況。
本文提出的軟體機器人如圖1所示:
該軟體機器人由軀干、支腿和氣管組成,其中軀干內部由一格一格的氣室組成,如圖2所示。這些氣室的主要作用是儲存氣體驅動,幫助軟體機器人運動。腿部是通過氣體實現彎曲來驅動軟體機器人行走。氣管則是驅動氣體輸入的通道,用以傳輸軟體機器人所需的能量。
二、軟體機器人的制備
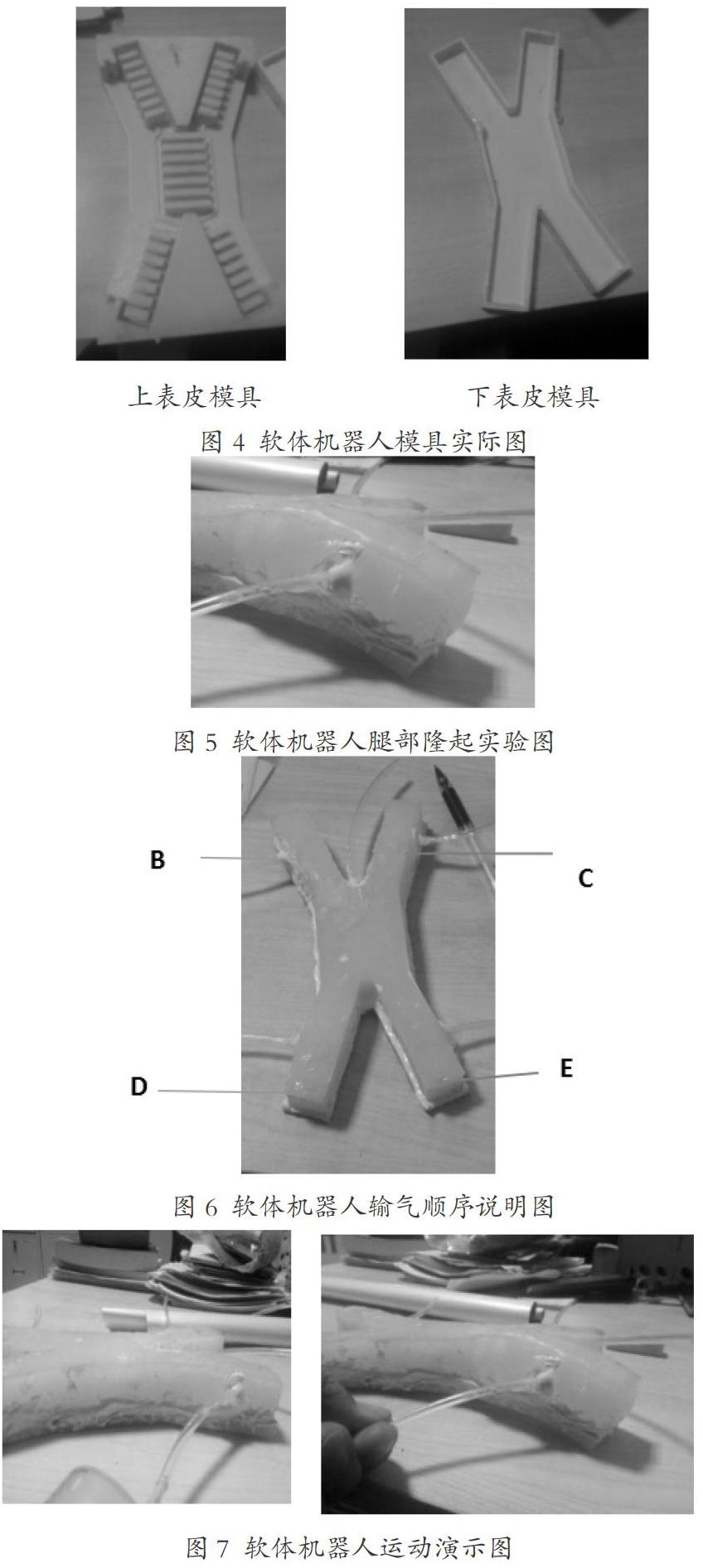
(一)模具制備
本次軟體機器人制備采用了3D打印技術,包含了壓層,灌膠等制作步。先通過soilworks軟件來制作模具,描出各個部分具體的尺寸,并通過3D打印得出事物。在solidworks中制作的模型如下圖所示:
打印之后的實物圖如下圖所示:
(二)灌壓
本次軟體機器人采用環氧樹脂A、B橡膠,制備步驟如下
步驟1: 先講A,B膠混合,用玻璃棒攪拌均勻倒入事先打印好的上表皮模具和下表皮模具2中。
步驟2:等晾干后,將兩個模具取出,可以得到兩個部件,并將氣管貫穿在其中并排布好并用環氧樹脂用AB膠將兩個模具粘連在一起。
(三)氣體驅動設計
為了讓軟體機器人可以靈活的運動,本文選擇的驅動方法是運用物理針管打氣進行驅動。由于在設計的時候將下表面設計的比上表面設計的要厚很多,當輸入氣壓大于一定時,上表面會鼓起,如圖5所示。支腿產生彎曲,使得物體運動。只要通過控制軀干和四肢產生彎曲的前后順序,即可實現軟體機器人行走。
三、實驗
本次實驗是采用5針管分別給四肢和軀干輸送氣體,來實現軟體機器人的運動。如果要讓軟體機器人前行,需要首先在軀干處打起,撐起整個身體。
其次,在軀干不斷氣的情況下,先支腿B后支腿c充氣,然后再先支腿D后支腿E充氣(具體如圖6所示),這樣就可以實現軟體機器人向前運動。
在軀干不斷氣情況下,反復上述充氣步驟,則可實驗該軟體機器人連續向前。其中圖7表示在反復進行上述步驟,該軟體機器人從紙卷一端運動另一端的情況。
如果需要向后運動,則只用將上述步驟反過來即可。先給軟體機器人的D,E腳打氣,其次是A,B。
參考文獻:
[1] Kyu-Jin Cho, Je-Sung Koh, Sangwoo Kim, Won-Shik Chu,Yongtaek Hong and Sung-Hoon Ahn,Review of Manufacturing Processes for soft biomimetic robots, International Journal of Precisionengineering and Manufacturing,2009,Vol.10(3):171-181.
[2] Yong Du, Min Xu, Erbao Dong, Qing Yan, Shiwu Zhang, Jie Yang, Preliminary research of a novel soft robot with three locomotion modes, Proceeding of the 2011 IEEE International Conference on Mechatronics and Automation August, Beijing, Cfhina,7-10.
[3] II-Kyun Jung, SunLim, An etherCAT based real-time centralized soft robot motion controller,2012 International Symposium on Instrumentation & Measurement,Sensor Network and Automation:117-120.
[4] A.Sadeghi, L.Beccai, and B. Mazzolai, Innovative soft robots based on electro-Rheological fluids, 2012 IEEE/RSJ International Donference on Intelligent Robots and Systems October,2012,Vilamoural,Slgarve,Portugal,7-12.
[5] Michael. O. Obaji and Shiwu Zhang, Investigation into the force distribution mechanism of a soft robot gripper modeled for picking complex objects using embedded shape memory alloy actuators,21013 6th IEEE Conference of Robotics,Automation and Mechatronics, 84-90.
[6] 曹玉君,尚建忠,梁科山,范大鵬,馬東璽,唐力.軟體機器人研究現狀綜述.機械工程學報,2012,Vol.48(3):25-33.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04