基于CAN總線的機械輔助設備自動控制系統設計
2017-10-21 19:51:23方立雯張凱
科技風 2017年19期
關鍵詞:自動控制系統
方立雯 張凱
摘要:傳統的機械輔助設備自動控制系統中的執行器與傳感器存在可靠性低、自身處理能力差等問題,為此,提出了一種基于CAN總線的機械輔助設備自動控制系統設計。首先對系統的硬件進行了設計;然后對系統的軟件進行了設計;最后進行了實驗。
關鍵詞:CAN總線;機械輔助設備;自動控制系統;系統設計
中圖分類號:TH39文獻標識碼: A
隨著電子技術與人工科學的不斷發展,人們對工程中機械輔助設備的自動化的要求也越來越高[12]。目前的機械輔助設備自動控制系統采用的是集中型的參數檢測,將傳感器、驅動器、液壓器等連接起來,促使整個系統的電纜與液壓管路增加,導致系統的可靠性低,自身處理能力差[34]。針對存在的問題,我提出了一種基于CAN總線的機械輔助設備自動控制系統設計。首先對系統的硬件進行了設計;然后對系統的軟件進行了設計;最后進行了實驗。實驗結果表明,機械輔助設備自動控制系統在CAN總線技術的支持下,響應的速度較快、魯棒性較好,擴展性較強。
1 基于CAN總線的機械輔助設備自動控制系統設計
基于CAN總線的機械輔助設備自動控制系統是由3部分組成,分別是:CAN 接口適配卡、多個現場智能控制單元、上位管理機。 采用 CAN 作為總線將每個控制的組件連接成一個具有分布特點的智能控制系統,以 AT89C52 的單片機作為該系統模塊的智能控制器,其傳輸的介質是通信位速率為125Kbit/s的雙絞線。并使用微電腦的形式構成上位管理機,其網絡的結構使用的是 CAN 的總線驅動方式對機械進行輔助。
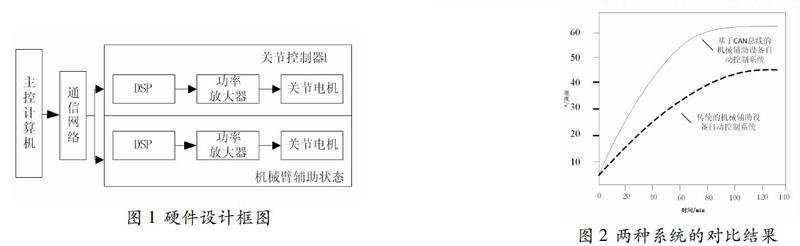
隨著社會經濟的發展,機械輔助設備自動控制系統需要不斷的更新,因此,采用了基于CAN總線的方法對硬件系統的結構進行硬件設計。機械輔助設備自動控制系統的硬件組成有:計算機、通訊的網絡、關機的控制器。硬件系統的設計是由3個相同的控制器分布在機械輔助自動控制器的不同關節,并通過接收到的指令傳遞給計算機系統,具體的硬件設計框圖如圖1所示。
根據設計中對模塊的需求選用了型號為EC4-1814LD2NA,具有嵌入式的單板的計算機作為整個機械輔助的主控制系統,但是這種型號的主控制計算機并不包含CAN的總線,因此,又配置了型號為USBCAN-I,具有智能功能的接口卡。利用USB的總接口將計算機和網絡的總線與控制器的開關連接起來能夠促進數據與指令的傳達,而通信的協議選擇的是CAN總線的協議。在進行控制的時候,采用輸出功率為240W的關節的控制器作為關鍵的步驟,CAN作為總線,其電機碼盤的總接口與通信的接口各裝置一個型號為TMS320F2810主控的芯片,并采用AD的裝換器作為電路轉碼的驅動器。
2 實驗結果與分析
為了驗證基于CAN總線的機械輔助設備自動控制系統設計的合理性進行了如下的實驗。在機械輔助的自動控制的過程中,使用C51的語言對系統的軟件進行開發與調試,采用A/D采樣控制程序和控制算法。對CAN的控制器網絡通信進行參數的設定,包括:控制的速率、屏蔽碼、驗收碼、字段長和總線定時。而信息的發送與接收都是由控制器自動完成的,作為發送的程序需要將發送的幀數傳遞到緩沖區,就可以啟動命令。將傳統的機械輔助設備自動控制系統與基于CAN總線的機械輔助設備自動控制系統進行對比,如圖2所示。
通過圖2可以看出,基于CAN總線的機械輔助設備自動控制系統與傳統的機械輔助設備自動控制系統相比,其通信的速率更高。
由此可以得出結論:采用CAN總線的自動控制系統通信速率較高,具有實時性和錯誤處理能力的優點,既發揮了CAN總線的優勢,又彌補了傳統方式的不足。
3 結語
隨著電子技術的不斷發展,我國的工業領域也需要越來越高的自動化程序。基于CAN總線的技術將機械輔助設備自動控制系統的各種模塊進行了分散,各個模塊都有屬于自己的處理中心。該系統的設計極大的簡化了原本復雜的工程程序,提高了自動控制的可靠性,降低了傳統模式下操作的風險,具有較廣泛的應用前景。
參考文獻:
[1]黎永鍵,趙祚喜,黃培奎,等.基于CAN總線的拖拉機導航控制系統設計與試驗[J].農業機械學報,2016(s1):3542.
[2]劉曉光,張亞靖,胡靜濤,等.基于CAN總線的農機導航控制系統終端的設計與實現[J].農機化研究, 2016(11):133136.
[3]周凱紅,李成,王聰毅,等.基于CAN總線的車間粉塵檢測系統設計[J].儀表技術與傳感器, 2016(11):8184.
[4]宋全偉,甄國涌,劉東海,等.基于CAN總線的多通道數據采集系統設計[J].電子器件, 2015, 38(5):10761080.
作者簡介:方立雯,女,助教,主要從事機械制造及其自動化方向研究;張凱,男,助教,主要從事機械制造及其自動化方向研究。
猜你喜歡
電子技術與軟件工程(2016年23期)2017-03-06 21:23:45
科技創新與應用(2017年3期)2017-02-18 16:54:12
考試周刊(2017年6期)2017-02-13 10:12:55
企業技術開發·下旬刊(2016年11期)2016-12-27 10:26:50
電子技術與軟件工程(2016年22期)2016-12-26 21:36:26
中國科技博覽(2016年18期)2016-10-19 06:57:16
科技視界(2016年14期)2016-06-08 19:01:12
科技視界(2016年11期)2016-05-23 11:08:57
中國科技博覽(2016年14期)2016-04-25 01:47:51
電腦知識與技術(2016年4期)2016-04-11 15:28:35
