麥弗遜懸架下擺臂分析及優(yōu)化
2017-10-24 08:00:26袁世林宛銀生周磊許生
汽車實用技術 2017年20期
袁世林,宛銀生,周磊,許生
(安徽江淮汽車集團股份有限公司,安徽 合肥 230601)
麥弗遜懸架下擺臂分析及優(yōu)化
袁世林,宛銀生,周磊,許生
(安徽江淮汽車集團股份有限公司,安徽 合肥 230601)
基于某車型下擺臂模型為研究對象,以底盤多體動力學模型模擬下擺臂在極限工況載荷作用下受力狀態(tài),提取得到載荷值,利用HyperWorks建立其有限元模型,并進行下擺臂強度分析。分析結果顯示在下擺臂上下板翻邊搭接缺口處應力較大,對下擺臂此處進行結構優(yōu)化,并再次進行分析計算,結果表明優(yōu)化后的下擺臂滿足強度要求。同時對下擺臂進行靜剛度分析和屈曲分析,分析結果表明下擺臂靜剛度和屈曲均滿足要求。
下擺臂;強度;優(yōu)化;靜剛度;屈曲
CLC NO.: U461.6 Document Code: A Article ID: 1671-7988 (2017)20-111-03
前言
下擺臂作為汽車懸架系統(tǒng)中傳力和導向的重要部件,其一端通過橡膠襯套與副車架連接,另一端通過球鉸與轉向節(jié)連接,將作用在車輪上的各種力傳遞給車身,并保證車輪按照一定軌跡運動。由于下擺臂的實際工況載荷比較復雜,在其所受的應力達到材料許用應力的情況下,局部位置可能產生開裂,影響正常使用,甚至影響到整車的可靠性。
本文根據(jù)極限工況載荷作用下的下擺臂,從多體動力學提取得到載荷值,進行下擺臂強度分析,并應用“慣性釋放法”獲得不同工況下的下擺臂應力分布特征;據(jù)此確認易出現(xiàn)應力較大的部位,并進行結構優(yōu)化,確保下擺臂滿足強度要求。同時進行靜剛度和屈曲分析使產品達到使用要求。
1 麥弗遜懸架動力學分析
本次分析模擬四種極限工況:垂直,轉向,制動,起步四種工況,通過多體動力學載荷分解得到相關硬點的載荷輸入,進行有限元強度分析。具體分析流程如圖1所示。
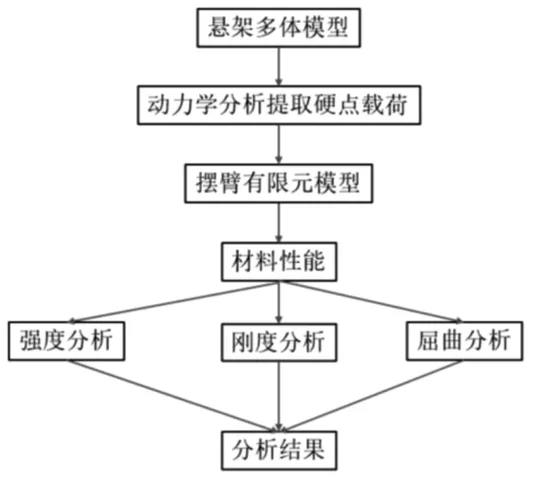
圖1 下擺臂分析流程
1.1 工況分析
在車輛行駛的正常工況下,與會遇到一些極限行駛的環(huán)境。常見的極限工況主要有:車輛滿載行駛通過凹坑或凸坎時,車輛受到路面的沖擊,作用在下擺臂上的垂向力;在制動工況下,車輛受到的最大縱向制動力;當車輛轉向時,由于離心力的影響,作用在下擺臂上的側向力。在保證車輛與實際行駛工況一致的條件下,確認下擺臂在極限工況下受到載荷和約束[1]。根據(jù)下擺臂受到的極限靜載工況,結構應力以下面4種工況進行分析。
(1)起步工況 車輛處于滿載時,在起步1g狀態(tài)下,下擺臂的應力分析主要是檢查 CAE模型以及施加的約束能否得到滿足工程意義的結果。
(2)垂直工況 車輛彈簧承載3.5g的質量時,下擺臂應處于上極限狀態(tài)。
(3)制動工況 車輛以極限減速度1g制動時,由于慣性力的作用,車輛的軸荷發(fā)生轉移,大約能使前軸的軸荷增加四分之一。
(4)轉向工況 車輛在1g側向加速度下轉向時,前(后)軸荷內側載荷大部分轉移到外側車輪上,同時承受側向力作用。
1.2 ADAMS軟件提取載荷
本文將采用ADAMS軟件仿真麥弗遜前懸架在四種典型工況下,下擺臂 3個硬點所受的力和力矩。在 ADAMS/Car模塊下,建立前懸架模型并進行裝配,根據(jù)實車參數(shù),完成質量、硬點、襯套、彈簧和減振器特性等數(shù)據(jù)的設定。所建模型如圖2所示。
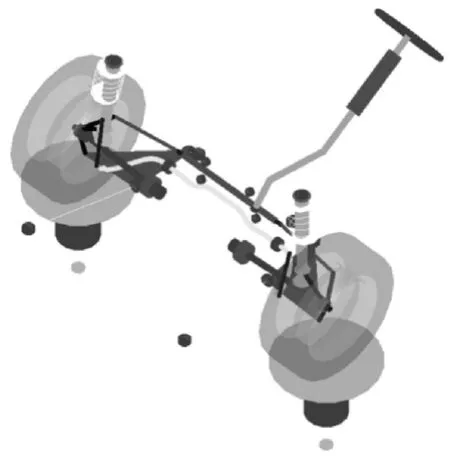
圖2 前懸架模型圖
2 結構應力分析
2.1 建立Hypermesh有限元模型
根據(jù)載荷情況,應用“慣性釋放法”,對下擺臂進行結構應力分析。由于下擺臂鈑金件結構復雜,小特征較多,故建模中采用四面體網(wǎng)格進行劃分。在幾何清理中,合并幾何模型中的的自由邊、修復小曲面、查找特征(如肋板、倒角、凸緣等)[2]。清除小于給定尺寸的小孔、清除邊倒角、在孔附近添加 Washer單元層。避免局部小特征造成不能進行網(wǎng)格劃分的困難。為提高建模精度[3],在經過多次試劃分的基礎上,選取較小的單元尺寸3mm[4],并對倒角和曲率變化的地方進行細化,提高有限元模型與幾何模型的一致性。對前下擺臂進行網(wǎng)格劃分后的有限元模型如圖3所示,該前下擺臂有限元模型共有18120個節(jié)點,18739個單元。

圖3 下擺臂有限元模型
2.2 材料參數(shù)
對前下擺臂模型建立材料屬性,如表1所示。

表1 下擺臂材料屬性
2.3 強度分析結果
前擺臂各工況下最大應力值如表2所示。
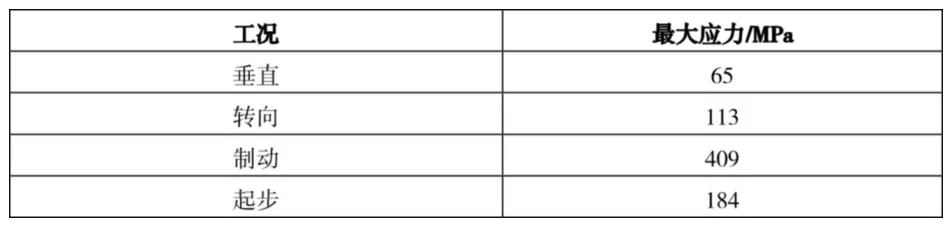
表2 各工況下前擺臂應力結果
2.4 下擺臂的優(yōu)化與驗證
通過上述對下擺臂結構的有限元分析,己找到下擺臂結構設計中應力集中之處。因此,需對分析所得的安全系數(shù)較低的位置進行結構優(yōu)化。在上面結構的分析中發(fā)現(xiàn),下擺臂在制動工況下其最大應力值接近材料的屈服極限,其最大應力發(fā)生在下擺臂上下板搭接的鈑金缺口處,在實際樣件焊接時此處也易出現(xiàn)虛焊,故以下擺臂此處缺口為下擺臂優(yōu)化和改進的主要目標。通過把上下板搭接的鈑金缺口位置錯開,提高加強板的高度的優(yōu)化方法,這樣鈑金缺口焊接時能直接把缺口和加強板焊接在一起,避免此處出現(xiàn)虛焊等焊接缺陷。基于上述思想,結構經優(yōu)化后的下擺臂模型如圖4所示。
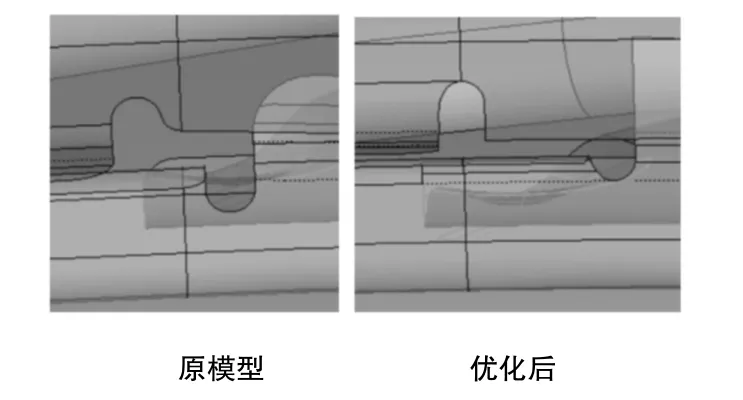
圖4 對上下板鈑金缺口優(yōu)化前后對比
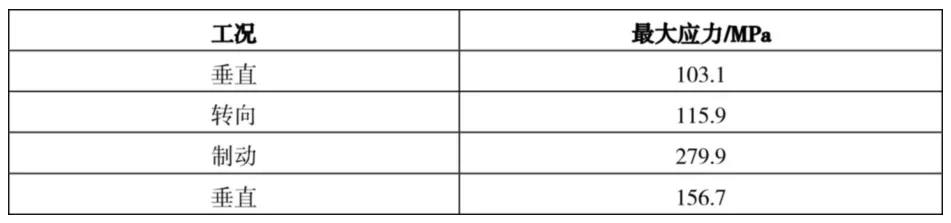
表3 各工況下前擺臂應力結果
從優(yōu)化前后下擺臂最大應力值對比來看,下擺臂在制動工況下的最大應力值大大的降低了,滿足了設定的強度安全系數(shù)要求。
3 其它性能分析
3.1 靜剛度分析
下擺臂進行靜剛度加載邊界條件如圖5所示,約束下擺臂前后安裝點的平動,球頭約束Z向平動,在各安裝支架硬點分別加載Fx、Fy,F(xiàn)x = Fy =1000N。分析結果見表4,分析結果表明下擺臂靜剛度滿足要求。

圖5 下擺臂靜剛度約束模型

表4 下擺臂靜剛度分析結果
3.2 屈曲分析
下擺臂進行屈曲分析加載邊界條件如圖6所示,約束下擺臂前后安裝點的平動,球頭約束Z向平動,在各安裝支架硬點分別加載Fx、Fy。分析結果見表5,分析結果表明下擺臂屈曲滿足要求。
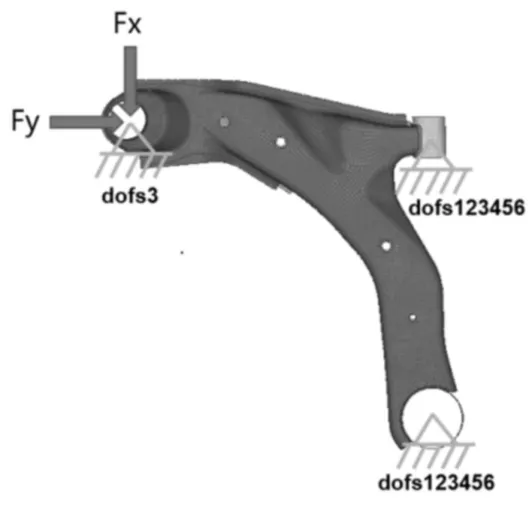
圖6 下擺臂屈曲約束模型

表5 下擺臂屈曲分析結果
4 結論
本文以某乘用車麥弗遜懸架的下擺臂為研究對象,首先進行結構的有限元強度分析,獲得原設計方案中的安全系數(shù)低的地方主要集中于下擺臂上下板搭接翻邊缺口處,通過把上下板搭接的鈑金缺口位置錯開,并提高加強板高度的優(yōu)化方法,并對優(yōu)化后的結構再次分析計算,結果顯示優(yōu)化后的下擺臂滿足設定的安全系數(shù)要求。然后,對下擺臂進行靜剛度分析和屈曲分析,分析結果表明均滿足設計要求,較好驗證了下擺臂整體設計效果。
[1] 史建鵬,管欣.懸架下擺臂的疲勞壽命分析[J].汽車工程,2013.35(3): 256-260.
[2] 杜平安.有限元網(wǎng)格劃分的基本原則[J].機械設計與制造,2000(01).
[3] Zilincik S,Defrank J,et al.A New Approach to Evaluating Spot Welds for Automotive Durability [C].International Body Engineering Con-ference & Expositiong,Detroit,Michigan.United States,1998.9.
[4] Topa M M,et al.Fatigue Failure Prediction of a Rear Axle Housing Prototype by Using Finite Element Analysis[J].Engineering Failure Analysis,2009(16):1474-1482.
Optimization Design of Macpherson Suspension Lower Control Arm
Yuan Shilin, Wan Yinsheng, Zhou Lei, Xu Sheng
( Anhui Jianghuai Automobile Co., Ltd, Anhui Hefei 230601)
Model as the research object, based on a model lower control arm to the chassis multi-body dynamics simulation model of lower control arm stress under the working condition of the limit load, extract load value, its finite element model was established based on HyperWorks, lower control arm strength analysis was carried on.Analysis results show that in the lower lower control arm stress is larger, flanging lap gaps to structural optimization of lower control arm here, and carries on the analysis and calculation again, the results show that the optimized lower control arm to meet the strength requirement.The static stiffness analysis and buckling analysis of the lower control arm are analyzed, and the results indicate that the static stiffness and buckling of the lower arm can satisfy the requirements.
Lower Control Arm; Strength; Optimization; Static Stiffness; Buckling
A 文章編號:1671-7988 (2017)20-111-03
10.16638/j.cnki.1671-7988.2017.20.039
袁世林(1988-),男,助理工程師,碩士,研究方向是底盤懸架系統(tǒng)設計。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
