基于模糊PID的溫室大棚溫度控制系統研究
2017-10-24 02:33:36潘曉貝
三門峽職業技術學院學報 2017年3期
◎潘曉貝
基于模糊PID的溫室大棚溫度控制系統研究
◎潘曉貝
(三門峽職業技術學院 電氣工程學院,河南 三門峽 472000)
確定了溫室大棚溫度模型,對溫室大棚溫度控制系統進行了研究,設計了溫室大棚溫度模糊自適應PID控制器,并進行仿真測試。仿真結果表明,該控制器具有良好的動態性能,輸出無超調,響應時間快。測試證明,本系統對溫室溫度能起到一定的調控效果,可以為農作物的生長創造適宜的環境。
溫室;溫度控制;模糊PID;MATLAB
在現代農業生產中,溫室大棚應用越來越廣泛。而溫室內的溫度是影響農作物生長的最重要的環境參數,它關系到農作物的生長和農產品的高產。因此,溫室大棚內溫度的智能監控就尤為重要。而傳統的溫室溫度控制大多由人工定期操作,溫度不穩定,不利于農作物的生長,已不能滿足現代智能溫室的要求。筆者進行了基于模糊PID控制的溫室大棚溫度控制系統的研究,實現溫度控制系統的智能化。
1 系統工作原理
本系統的控制量主要是溫室內的溫度,執行機構主要有:加熱設備、加濕設備、降溫設備和風機等,系統能對溫室大棚內的溫度進行調控,使其穩定在滿足果蔬等農作物生長所需的條件值。[1]

圖1 系統總體結構
系統總體結構如圖1所示,包括監制平臺、ZigBee協調器、ZigBee節點、溫度傳感器和各種執行機構。[2]ZigBee無線傳感器節點采集溫室內的溫度參數,采集來的溫度參數通過ZigBee無線傳感器網絡傳送到DSP控制平臺,控制平臺根據溫室模型及控制理論算法,對溫度參數進行分析處理后,發出命令去指揮相關執行機構工作,從而起到自動調節溫室大棚內溫度的作用,使溫室內溫度達到滿足農作物生長的最佳條件。
2 溫度模型的建立

式中:V是溫室大棚的體積(m3);Tin是溫室大棚內的溫度(℃);Qrad是照射在溫室大棚覆蓋層的單位面積的太陽輻射能(W/m2);Qheat為加熱裝置的加熱功率(w),其表達式如下:Qheat(t)=ch×Heat(t) (2)
式(2)中:ch表征加熱源的傳熱系數。

經過實地考察并查閱大量資料,提出溫室內溫度動態模型如式(1)所示:
參考當地一溫室大棚內影響果蔬生長的環境因子所得數據,并根據有關運算法則算出M(t)的相對平均值M。用M替代M(t)后對式(3)進行推導計算得到:

式(4)中,Heat(S)是調控溫度的控制輸出傳遞函數,傳遞函數系數為:
綜上所述,溫室大棚內的溫度控制系統的動態數學模型近似為帶時滯擾動的一階慣性系統。
3 溫度模糊PID控制器的設計
3.1 溫度模糊控制器結構的確定
由于溫室大棚內的溫度系統是時滯擾動的一階慣性系統,傳統PID控制算法已不適用,本系統采用模糊PID控制算法,把常規控制和模糊控制融合起來,取二者之長。
溫度模糊控制器如圖2所示,該系統為兩輸入三輸出的結構。輸入量是e(溫室大棚內溫度偏差)和 ec(偏差變化率),輸出量是:kp、ki、kd,即控制的三個參數。[3]
3.2 模糊化
模糊上的論域是和的變化范圍,即:e,ec={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
模糊子集是{PB,PM,PS,ZO,NS,NM,NB},表示從正大到負大。
確定隸屬函數時考慮到要在保證穩定性的前提下,提高系統的動態響應,本系統選用簡單高效的三角形函數作為隸屬函數。[4]
3.3 建立模糊規則
自整定規律如下[5]:
(1)誤差的減小通過比例控制來實現,要想系統響應越快Kp就得越大,但同時也會增大超調量。因此,在控制后期,Kp的值不宜過大。
(2)積分控制雖然有滯后性但靜差可消除。開始時Ki小些,后期慢慢增大,用以減少靜態誤差。
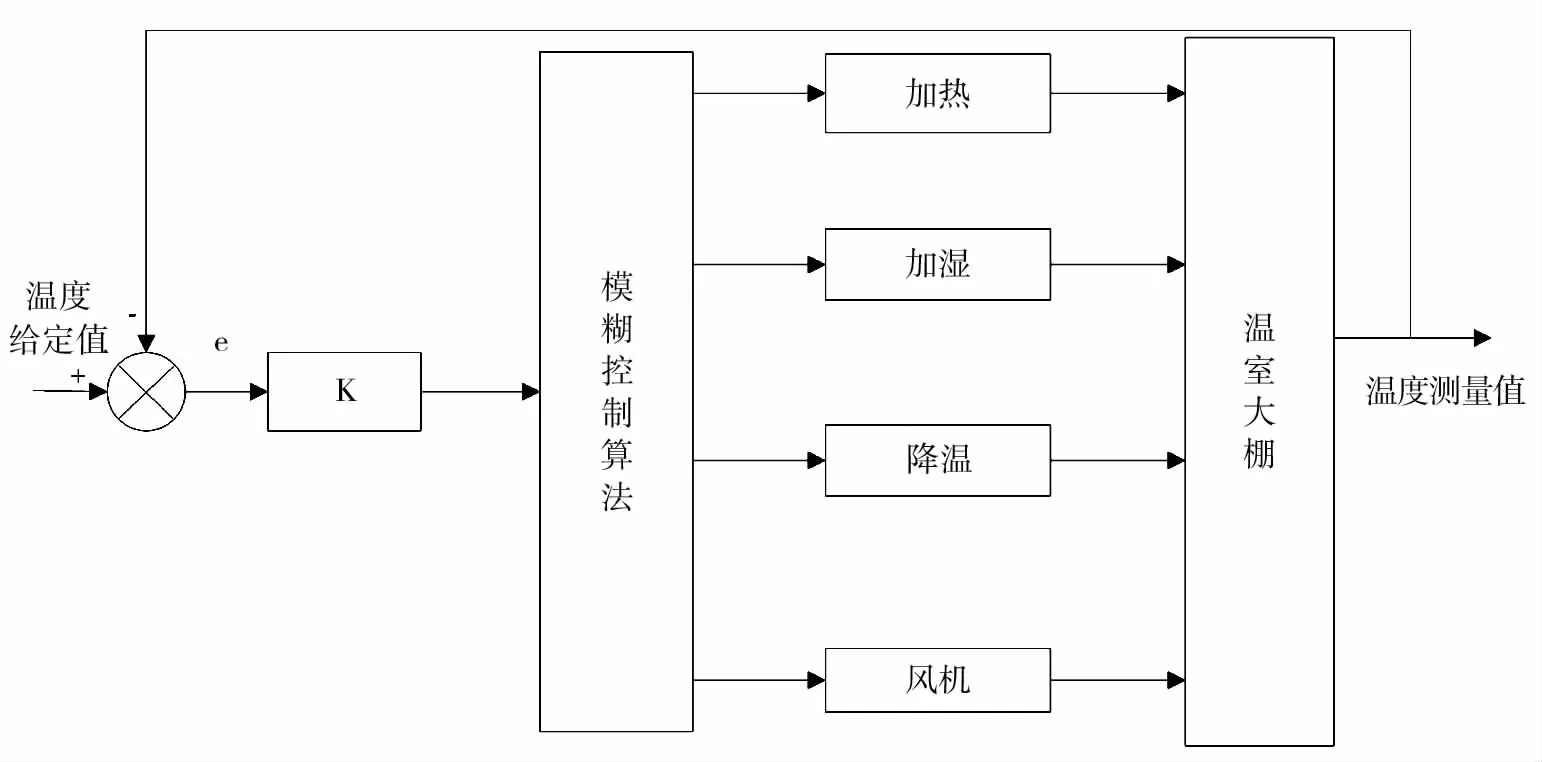
圖2 溫度模糊PID控制器結構
(3)微分控制能加速系統響應速度,但過大容易產生振蕩,因此后期應逐漸減小,保證系統穩定運行。
3.4 解模糊
從模糊集合變換到實際輸出就是解模糊。解模糊采用重心法。推理和合成規則分別為Min法和Max法。則輸出即為PID參數的修正值。經過模糊后的PID參數計算公式見式(6):
KP=K'P+{e,ec}pKi=K'i+{e,ec}iKd=K'd+{e,ec}d(6)

圖3 日溫度變化示意
4 系統仿真
通過分析得到溫室內的溫度系統是帶時滯擾動的一階慣性系統,傳遞函數如下:
參考某溫室的采樣數據,得到傳遞函數系數如下:1/K=4.440.31,T=713.628,τ=12
利用MATLAB軟件對溫度控制系統進行仿真,并對傳統PID控制算法也進行了仿真,得出結論:模糊PID控制算法的輸出曲線無超調,響應時間快。[6]
5 系統測試
對系統調試后在實驗室內用電暖氣模擬溫室內的加熱裝置來對溫度控制系統進行模擬測試,以檢驗本系統的控制效果。為了對比效果,分別對未經控制的室內溫度和經過控制的室內溫度進行了測量,并根據測量所得數據畫出日溫度變化示意圖,如圖3所示。
由圖3日溫度變化示意圖可以看出經過控制的室內溫度比未經控制的溫度變化得緩慢一些。試驗證明:本系統對溫室溫度可以起到一定的調控效果,基本可以為農作物的生長創造適宜的環境。當然,由于測試環境所限,加上電暖氣的作用范圍小,故系統的調控效果并沒有完全顯現出來。
6 總結
筆者首先建立了溫室大棚溫度模型,分析得出了溫室大棚的溫度系統是帶時滯擾動的一階慣性系統,由此確定采用模糊PID控制算法,設計了溫室大棚溫度模糊自適應PID控制器,并進行仿真測試。仿真結果表明,該控制器具有良好的動態性能,輸出無超調,響應時間快。實驗測試證明,本系統對溫室溫度可以起到一定的調控效果,可以為農作物的生長創造適宜的環境。
[1]董文國.蔬菜溫室大棚智能監控系統的設計[D].曲阜:曲阜師范大學,2012.
[2]潘曉貝,郭志冬.基于ZigBee的溫室環境監控系統設計[J].三門峽職業技術學院學報,2014(4):112-116.
[3]程朗萍,張鳳翔.基于模糊控制的煤礦井下含塵氣體除濕系統研究[J].西南師范大學學報(自然科學版),2016(3):45-50.
[4]暴翔,何小剛.基于模糊PID控制器的等速采樣系統[J].煤炭技術,2017(6):273-275.
[5]高峰,姬長英,王海青,等.基于自整定模糊PID的DSP溫度控制系統設計[J].科學技術與工程,2011,11(18).
[6]胡波,陳阿林,孫小濤.基于Matlab/Simulink的遙感圖像處理[J].重慶師范大學學報(自然科學版),2012,29(4):102-106.
TP272
B
1671-9123(2017)03-0137-04
2017-08-18
河南省高等學校重點科研項目資助性計劃(16A510030)
潘曉貝(1982-),女,河南靈寶人,三門峽職業技術學院電氣工程學院講師。
(責任編輯 卞建寧)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小讀者(2021年2期)2021-03-29 05:03:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
瘋狂英語·新悅讀(2019年11期)2019-12-18 05:14:16
華人時刊(2019年13期)2019-11-17 14:59:54
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
NBA特刊(2018年21期)2018-11-24 02:48:04
文苑(2018年22期)2018-11-19 02:54:14