節(jié)點(diǎn)外嚙合行星輪系耦合動(dòng)力學(xué)分析及試驗(yàn)驗(yàn)證
2017-11-01 14:18:45鮑和云譚在銀朱如鵬陸鳳霞
鮑和云,譚在銀,朱如鵬,陸鳳霞
?
節(jié)點(diǎn)外嚙合行星輪系耦合動(dòng)力學(xué)分析及試驗(yàn)驗(yàn)證
鮑和云,譚在銀,朱如鵬,陸鳳霞
(南京航空航天大學(xué)機(jī)電學(xué)院,江蘇南京,210016)
考慮太陽(yáng)輪和行星架支承軸承的時(shí)變支承剛度,采用集中參數(shù)法建立節(jié)點(diǎn)外嚙合行星齒輪系統(tǒng)齒輪?軸承耦合動(dòng)力學(xué)模型,運(yùn)用Rung-Kutta算法求解得到太陽(yáng)輪和行星架的振動(dòng)加速度響應(yīng);利用某型機(jī)械功率封閉試驗(yàn)臺(tái)開(kāi)展振動(dòng)測(cè)試試驗(yàn),基于小波變換獲得降噪信號(hào)。研究結(jié)果表明:支承剛度時(shí)變情況下的振動(dòng)加速度幅值要大于支承剛度為定值時(shí)的加速度。橫向振動(dòng)的試驗(yàn)值與理論值的誤差為16.27%,在允許范圍內(nèi),而縱向振動(dòng)受重力影響存在較大偏差,同時(shí),考慮時(shí)變支承剛度求解得到的振動(dòng)加速度更接近試驗(yàn)結(jié)果,即支承剛度的時(shí)變性不可忽略。
節(jié)點(diǎn)外嚙合;行星輪系;滾動(dòng)軸承;耦合動(dòng)力學(xué);試驗(yàn)驗(yàn)證
在普通齒輪嚙合形式中,摩擦力在節(jié)點(diǎn)處發(fā)生換向造成系統(tǒng)內(nèi)的沖擊振動(dòng),通過(guò)采用節(jié)點(diǎn)外嚙合,使得實(shí)際嚙合線不經(jīng)過(guò)節(jié)點(diǎn),進(jìn)而摩擦力在節(jié)點(diǎn)處不換向,減少了系統(tǒng)內(nèi)的沖擊振動(dòng),有效改善了系統(tǒng)的動(dòng)力學(xué)特性。目前節(jié)點(diǎn)外嚙合齒輪系統(tǒng)動(dòng)力學(xué)方面已有不少的研究成果[1?4],這些研究成果首先論述了節(jié)點(diǎn)外嚙合的實(shí)現(xiàn)條件,進(jìn)而以單對(duì)齒輪、行星齒輪的平移?扭轉(zhuǎn)模型為研究對(duì)象,分析了節(jié)點(diǎn)外嚙合對(duì)系統(tǒng)動(dòng)力學(xué)特性的影響。但這些研究成果中軸承的支承剛度只是簡(jiǎn)單的處理成常量,并沒(méi)有考慮時(shí)變性對(duì)傳動(dòng)系統(tǒng)動(dòng)力學(xué)行為的影響,沒(méi)能進(jìn)一步揭示系統(tǒng)的動(dòng)力學(xué)特性,且只是理論研究并沒(méi)有得到試驗(yàn)驗(yàn)證。LIEW等[5?6]考慮了滾動(dòng)軸承時(shí)變剛度對(duì)單級(jí)平行軸齒輪傳動(dòng)系統(tǒng)動(dòng)力學(xué)行為的影響;周志剛等[7]考慮了滾動(dòng)軸承時(shí)變剛度,分析了行星齒輪?軸承耦合動(dòng)力學(xué)特性。雖然這些研究考慮了滾動(dòng)軸承的影響,但系統(tǒng)中的齒輪副均是普通嚙合,即非節(jié)點(diǎn)外嚙合,在節(jié)點(diǎn)外嚙合行星輪系中考慮軸承時(shí)變支承剛度,進(jìn)一步揭示節(jié)點(diǎn)外嚙合行星齒輪系統(tǒng)動(dòng)力學(xué)特性的研究還少有報(bào)道。本文作者以節(jié)點(diǎn)外嚙合行星輪系平移?扭轉(zhuǎn)模型為研究對(duì)象,考慮滾動(dòng)軸承時(shí)變支承剛度,建立齒輪?軸承耦合動(dòng)力學(xué)模型,求解得到系統(tǒng)動(dòng)態(tài)響應(yīng),并開(kāi)展驗(yàn)證試驗(yàn)。
1 滾動(dòng)軸承時(shí)變支承剛度計(jì)算
1.1 滾動(dòng)軸承受力與變形關(guān)系
滾動(dòng)軸承(本文以深溝球軸承為研究對(duì)象)由外圈、內(nèi)圈、滾動(dòng)體及保持架組成。假定內(nèi)圈與旋轉(zhuǎn)軸剛性連接,外圈與軸承座剛性連接,滾動(dòng)體在內(nèi)外圈之間等距排列,滾動(dòng)體與滾道之間為純滾動(dòng),則軸承變形主要是滾動(dòng)體與滾道之間的接觸變形。軸承受徑向力的載荷分布如圖1所示。
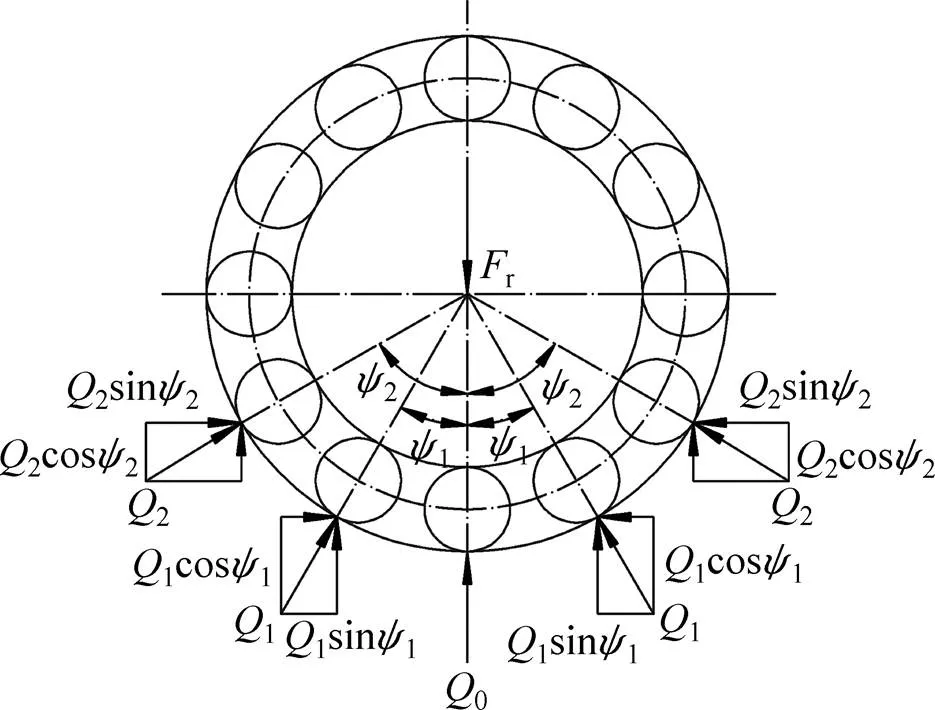
圖1 滾動(dòng)軸承載荷分布
由文獻(xiàn)[8]可知:忽略軸承阻尼的影響,其徑向力r和變形r的關(guān)系為

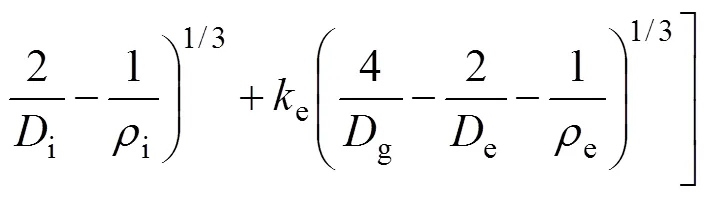
式中:i和e分別為與軸承幾何尺寸和材料等有關(guān)的系數(shù);g為滾動(dòng)體直徑;i為軸承內(nèi)圈與滾動(dòng)體接觸處直徑;e為軸承外圈與滾動(dòng)體接觸處直徑;i為滾動(dòng)體與內(nèi)圈的接觸曲率半徑;e為滾動(dòng)體與外圈的接觸曲率半徑;為受載滾動(dòng)體數(shù)目。
1.2 時(shí)變支承剛度表達(dá)
將式(1)中系數(shù)整理合并后可得
式中:H為Hertz接觸剛度系數(shù)。則軸承支承剛度定義如下:
由式(3)可知:軸承支承剛度不是一個(gè)常量,會(huì)隨著位移的變化而變化,具有時(shí)變性,滾動(dòng)軸承因此可視為變剛度系數(shù)的硬彈簧[8]。
2 齒輪?滾動(dòng)軸承耦合動(dòng)力學(xué)模型
由于行星輪系相比定軸輪系,其結(jié)構(gòu)更復(fù)雜,因此系統(tǒng)動(dòng)力學(xué)模型也更為復(fù)雜,建立模型時(shí)采用如下假設(shè):
1) 各行星輪具有相同的物理和幾何參數(shù),各方向上支承剛度相等。
2) 各齒輪均為漸開(kāi)線直齒圓柱齒輪,支撐和輪齒簡(jiǎn)化為彈簧。
3) 各構(gòu)件的運(yùn)動(dòng)保持在同一平面內(nèi)。
4) 忽略齒側(cè)間隙引起的非線性影響。
采用集中參數(shù)法,考慮太陽(yáng)輪和行星架的滾動(dòng)軸承時(shí)變支承剛度,忽略其余構(gòu)件支承剛度的時(shí)變性,建立了節(jié)點(diǎn)外嚙合行星齒輪傳動(dòng)系統(tǒng)動(dòng)力學(xué)模型如圖2所示(摩擦力和行星架橫向、縱向支撐未表示)。
為便于方程的建立,在圖中建立如下坐標(biāo)系:為定坐標(biāo)系,原點(diǎn)位于行星架的回轉(zhuǎn)中心,軸通過(guò)第一個(gè)行星輪的理論中心;OXY為動(dòng)坐標(biāo)系,與行星架固連并隨行星架等速旋轉(zhuǎn),原點(diǎn)位于各行星輪理論中心O,兩坐標(biāo)軸分別與坐標(biāo)軸平行。圖2中:和分別為構(gòu)件的橫向和縱向的平移自由度,為構(gòu)件的扭轉(zhuǎn)自由度,因此,每個(gè)構(gòu)件共有3個(gè)自由度,圖示系統(tǒng)包括太陽(yáng)輪、行星架、個(gè)行星輪和內(nèi)齒圈,因此該系統(tǒng)共有3+9個(gè)自由度。由以上動(dòng)力學(xué)模型,建立如下系統(tǒng)運(yùn)動(dòng)微分方程組:
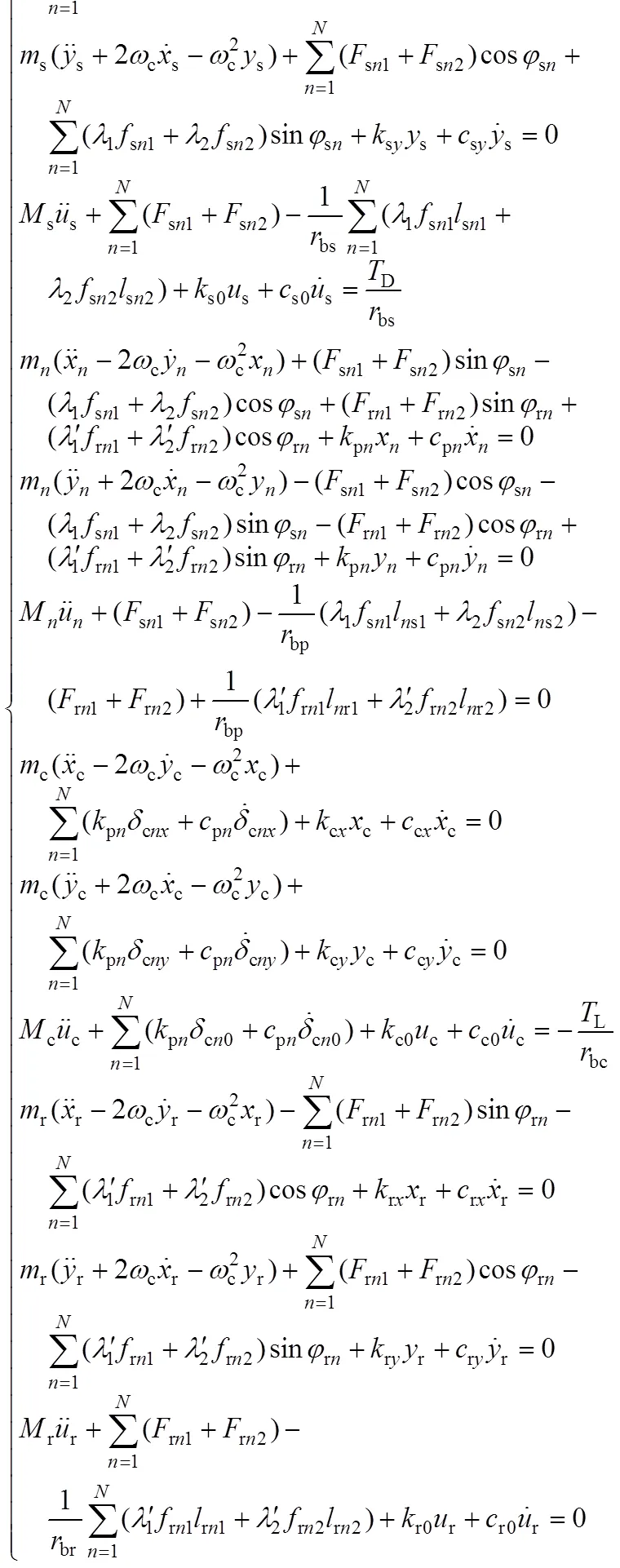
式中:下標(biāo)s,n,c和r分別為太陽(yáng)輪、第n個(gè)行星輪、行星架和內(nèi)齒圈;m和M分別為構(gòu)件的質(zhì)量和等效質(zhì)量;ωc為行星架的旋轉(zhuǎn)角速度;rb為構(gòu)件的當(dāng)量基圓半徑;kx,ky和k0分別為構(gòu)件橫向、縱向上的支承剛度和扭轉(zhuǎn)剛度;和分別為行星架相對(duì)于第n個(gè)行星輪的位移沿行星架2個(gè)線位移方向的投影;為行星架相對(duì)于第n個(gè)行星輪沿行星架切線方向的投影。cx,cy和c0分別為構(gòu)件橫向、縱向上的支承阻尼和扭轉(zhuǎn)阻尼;kpn和cpn分別為行星輪的支承剛度和支承阻尼;;,為太陽(yáng)輪和行星輪的嚙合角,為內(nèi)齒圈和行星輪的嚙合角,為第n個(gè)行星輪的位置角;TD為輸入轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩。
考慮太陽(yáng)輪和行星架的軸承支承,假設(shè)軸承內(nèi)圈與軸固定,由式(3)可得時(shí)變支承剛度如下:
由式(5)可知:軸承支承剛度與齒輪中心振動(dòng)位移有關(guān),即二者之間存在耦合關(guān)系。
該系統(tǒng)齒輪副的重合度介于1和2之間,F(為s和r;1,2)為齒輪副各對(duì)輪齒之間的嚙合力:
式中:為嚙合剛度;為嚙合阻尼,計(jì)算方法見(jiàn)文獻(xiàn)[9];為嚙合線上的相對(duì)位移。根據(jù)各嚙合齒輪的相對(duì)位置關(guān)系,得到各相對(duì)位移表達(dá)如下:


式中:p和g代表1對(duì)嚙合齒輪;p和g分別為兩嚙合齒輪在動(dòng)坐標(biāo)系中的角速度;p和g分別為兩嚙合齒輪的摩擦力臂。對(duì)于節(jié)點(diǎn)外嚙合齒輪,在輪齒嚙合過(guò)程中,保持為1或?1,即摩擦力不換向。
在齒輪嚙合過(guò)程中,摩擦因數(shù)隨著嚙合位置、潤(rùn)滑情況的不同而變化,但變化幅值不大,故在本文中將摩擦因數(shù)當(dāng)作定值,取動(dòng)摩擦因數(shù)=0.05[11]進(jìn)行計(jì)算。
以上系統(tǒng)運(yùn)動(dòng)微分方程的矩陣形式如下:

式中:為廣義質(zhì)量矩陣;為阻尼矩陣;b為滾動(dòng)軸承支承剛度矩陣;m為齒輪嚙合剛度矩陣;為激勵(lì)力矩陣;為廣義坐標(biāo)列向量:

3 實(shí)例計(jì)算
以某節(jié)點(diǎn)外嚙合行星齒輪傳動(dòng)系統(tǒng)原理樣機(jī)為例進(jìn)行計(jì)算,主要參數(shù)如表1和表2所示,外嚙合為普通嚙合形式,內(nèi)嚙合為節(jié)點(diǎn)外嚙合,行星輪個(gè)數(shù)=3,系統(tǒng)功率=25 kW,輸入轉(zhuǎn)速=1 000 r/min。
太陽(yáng)輪支承軸承型號(hào)為6213,行星架支承軸承型號(hào)為6020,具體參數(shù)如表1所示。
采用Rung-Kutta算法對(duì)系統(tǒng)運(yùn)動(dòng)微分方程組進(jìn)行求解,得到穩(wěn)定運(yùn)轉(zhuǎn)后太陽(yáng)輪和行星架的振動(dòng)加速度響應(yīng)如下。
由表2可知:行星架的軸承尺寸要大于太陽(yáng)輪的軸承尺寸,由式(1)~(3)可得輸出端的支承剛度更大,因此,圖3中行星架的振動(dòng)加速度要小于太陽(yáng)輪的振動(dòng)加速度。圖4中支承剛度的定值取時(shí)變支承剛度相同量級(jí)的值帶入計(jì)算,可見(jiàn)支承剛度時(shí)變情況下的加速度更大一些。
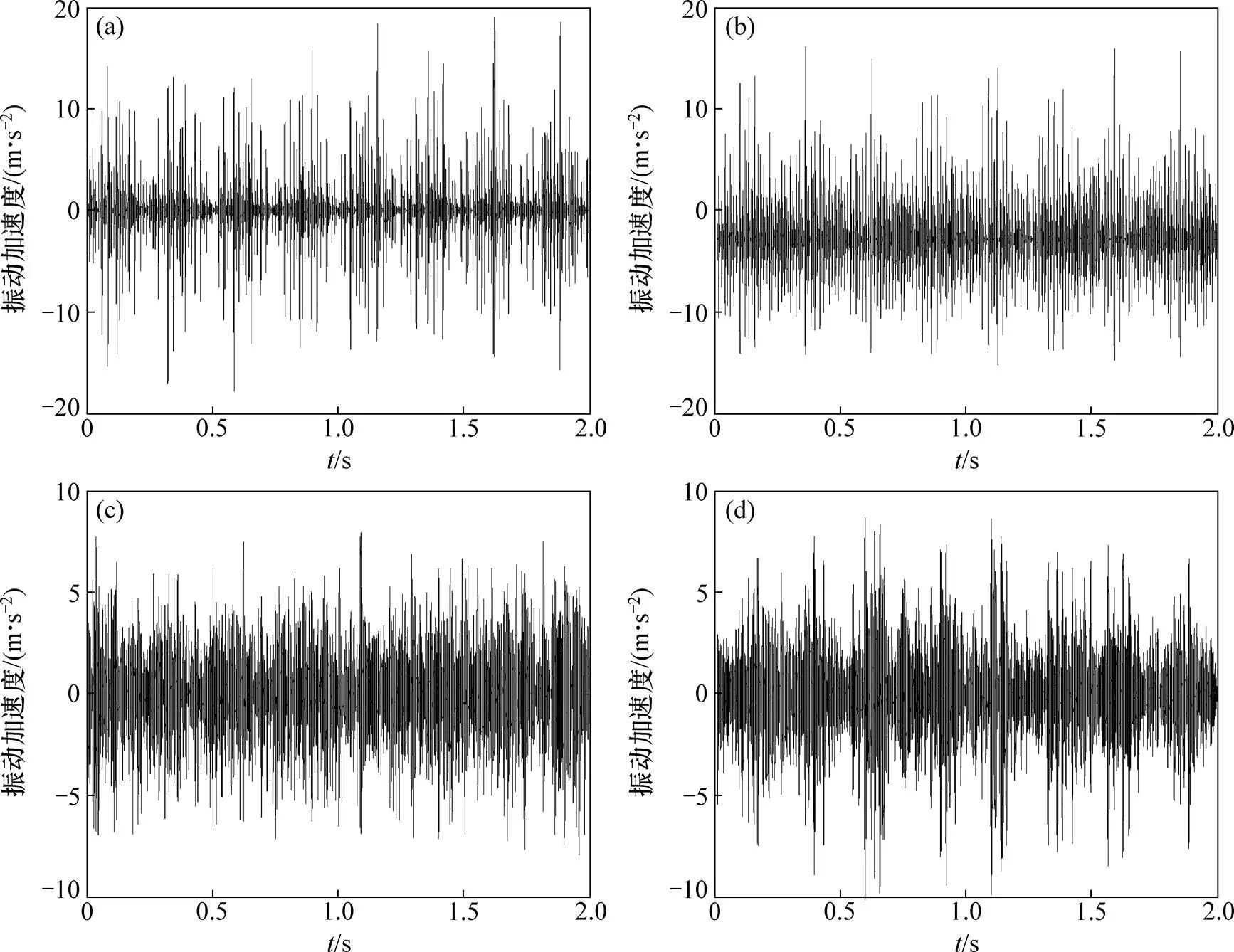
(a) 太陽(yáng)輪x方向;(b) 太陽(yáng)輪y方向;(c) 行星架x方向;(d) 行星架y方向
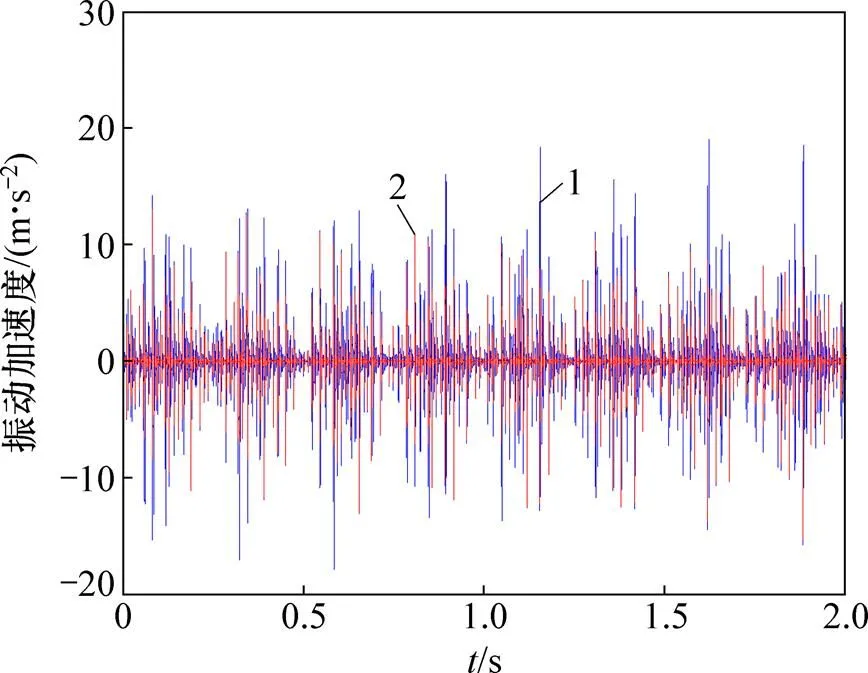
1—支承剛度時(shí)變;2—支承剛度定值。

表1 滾動(dòng)軸承主要幾何參數(shù)
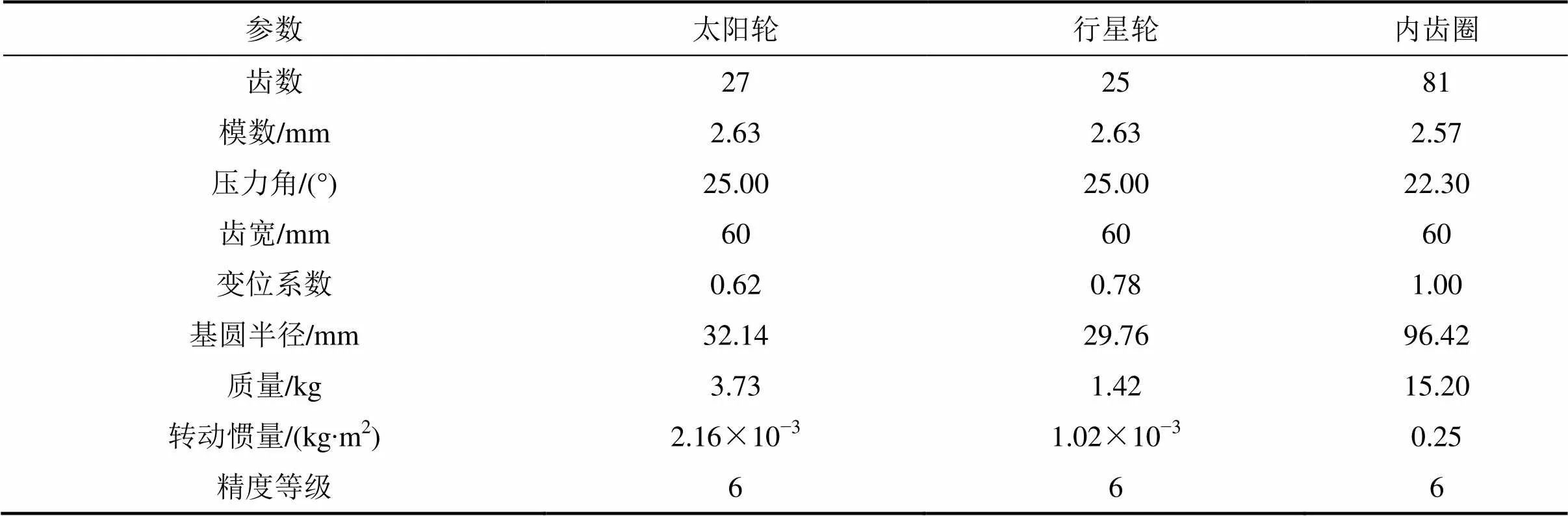
表2 節(jié)點(diǎn)外嚙合行星齒輪系統(tǒng)主要參數(shù)
4 試驗(yàn)驗(yàn)證
振動(dòng)測(cè)試試驗(yàn)通常在箱體外壁上布置加速度傳感器,測(cè)量得到振動(dòng)信號(hào),以分析系統(tǒng)的振動(dòng)特性。利用某機(jī)械功率封閉試驗(yàn)臺(tái),在太陽(yáng)輪軸承座處布置加速度傳感器,以獲得齒輪系統(tǒng)振動(dòng)信號(hào),試驗(yàn)齒輪箱各部件參數(shù)與表1相同,行星輪個(gè)數(shù)=3。
傳感器型號(hào)為PCB356A26通用型三軸加速度傳感器,可同時(shí)測(cè)量3個(gè)方向上的振動(dòng)信號(hào),信號(hào)采集系統(tǒng)為NI PXIe-1073,實(shí)際輸入轉(zhuǎn)速998 r/min,試驗(yàn)功率23.90 kW,采樣頻率s=4 096 Hz,采樣點(diǎn)數(shù)=8 192。測(cè)量得到的原始信號(hào)如圖5所示。
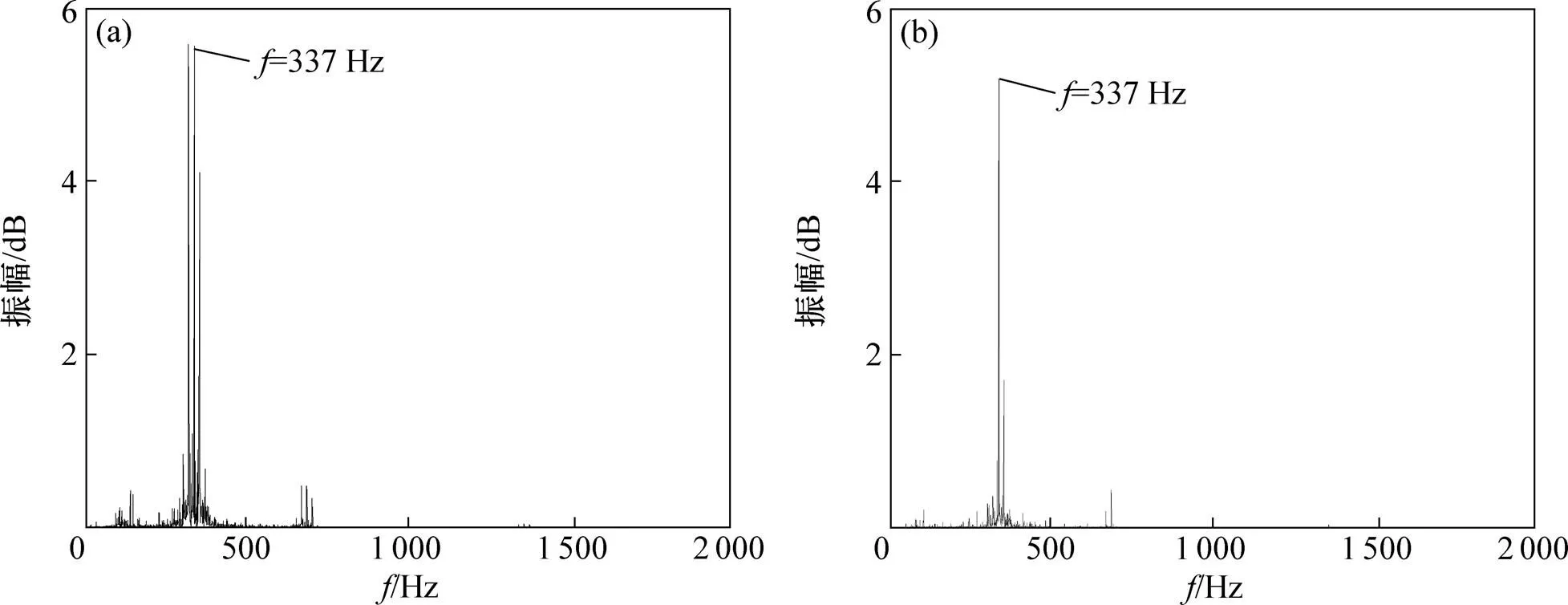
圖5所示為測(cè)量得到的時(shí)域信號(hào),對(duì)其作FFT變換得到圖6所示頻域信號(hào)。從頻域上可見(jiàn):嚙合頻率m=337 Hz,信號(hào)中同時(shí)存在邊頻及高頻噪音成分,無(wú)法直接用于驗(yàn)證理論分析結(jié)果,需要對(duì)原始信號(hào)進(jìn)行消噪處理,目前,機(jī)械振動(dòng)信號(hào)的消噪有多種方 法[12?13],其中小波變換對(duì)噪聲消除有較好的效果[14],因此得到了廣泛應(yīng)用。選擇合適的小波基對(duì)信號(hào)進(jìn)行小波分解,得到高頻和低頻分量,而噪聲往往存在于高頻分量,再通過(guò)設(shè)置合適的閾值,即可將高頻分量去除,實(shí)現(xiàn)噪聲消除。
目前常用的小波基有多種,需根據(jù)不同場(chǎng)合進(jìn)行選擇,其中Daubechies(dbN)小波系,經(jīng)研究在實(shí)際應(yīng)用中效果較好[15],對(duì)圖5中的原始信號(hào)采用db10小波進(jìn)行2層分解,采用默認(rèn)閾值消除高頻分量,重構(gòu)后得到如圖7所示的去噪信號(hào)。
對(duì)比圖5和圖7可知:小波分析有效地去除了噪聲影響,去噪信號(hào)的加速度幅值明顯小于原始信號(hào)。對(duì)比圖6和圖8可知:原始信號(hào)中的邊頻帶和高頻成分大部分被濾除,剩余的頻率成分主要為嚙合頻率,得到了較為干凈的去噪信號(hào),為了防止信號(hào)中有效成分丟失,并沒(méi)有對(duì)原始信號(hào)進(jìn)行過(guò)多的小波分解。由于重力的存在,使得方向的振動(dòng)受到影響,如圖7所示,方向的振動(dòng)加速度要小于方向,故取方向?qū)斎攵颂?yáng)輪振動(dòng)加速度最大值的理論值與試驗(yàn)值進(jìn)行比較,其中理論值分別取支承剛度時(shí)變和定值2種情況,如表3所示。由表3可知:支承剛度時(shí)變情況下的理論值與試驗(yàn)值的相對(duì)誤差為16.27%,由于理論模型在建立時(shí)采取了適當(dāng)簡(jiǎn)化,與實(shí)際模型存在一定差距;系統(tǒng)動(dòng)力學(xué)方程較為復(fù)雜,數(shù)值計(jì)算得到的是近似解;試驗(yàn)測(cè)量存在一定的系統(tǒng)誤差等原因造成了該誤差的存在,但屬于允許范圍,而支承剛度定值情況下的相對(duì)誤差達(dá)到43.95%,說(shuō)明同等條件下,支承剛度時(shí)變情況下的誤差更小,加速度值更接近試驗(yàn)結(jié)果,即支承剛度的時(shí)變性不可忽略。
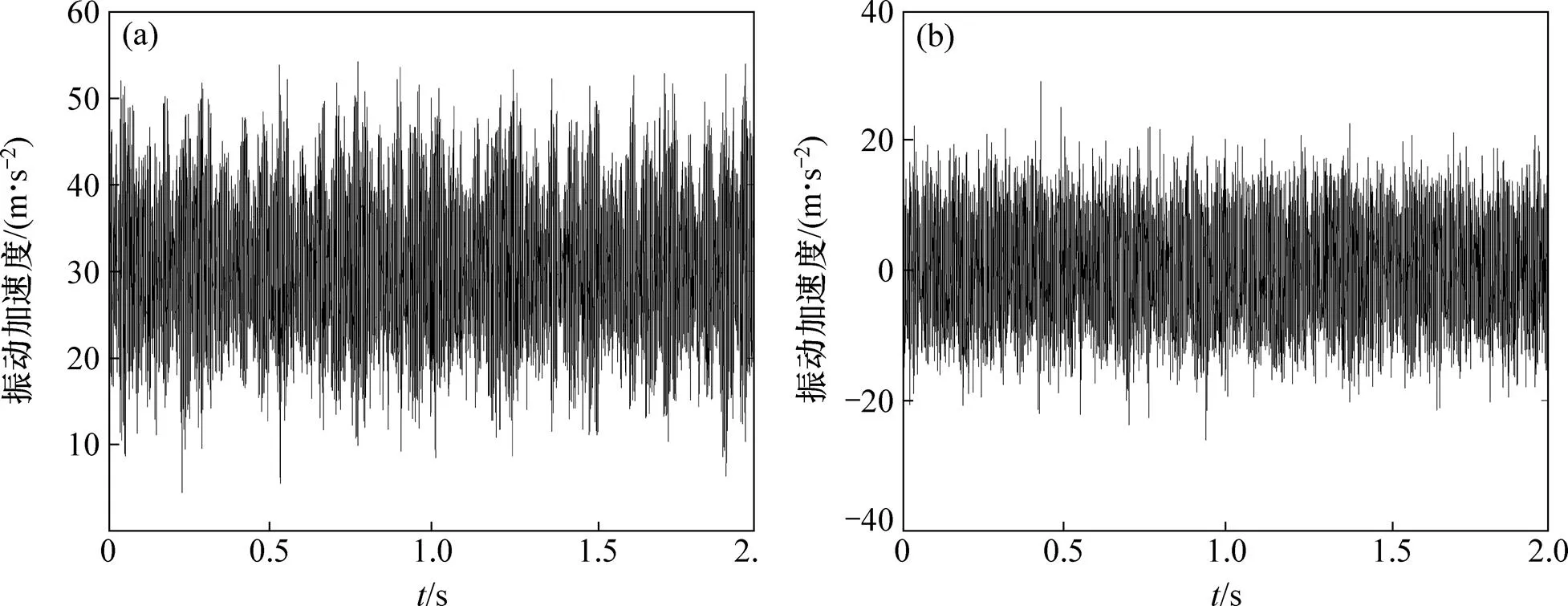
(a) x方向;(b) y方向
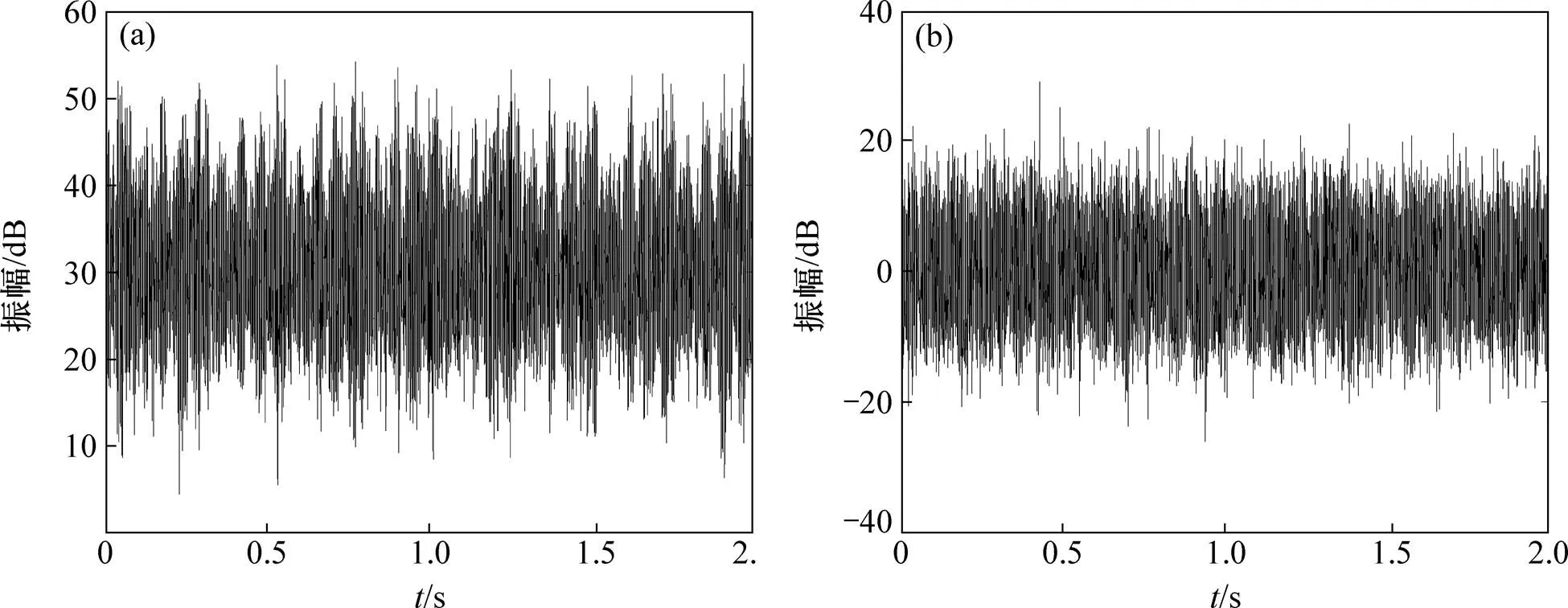
(a) x方向;(b) y方向
(a) x方向;(b) y方向
(a) x方向;(b) y方向

表3 理論值和試驗(yàn)值對(duì)比
5 結(jié)論
1) 考慮輸入、輸出構(gòu)件中滾動(dòng)軸承時(shí)變支承剛度,采用集中參數(shù)法建立節(jié)點(diǎn)外嚙合行星齒輪系統(tǒng)耦合動(dòng)力學(xué)模型,模型包含3+9個(gè)自由度,進(jìn)一步完善節(jié)點(diǎn)外嚙合行星輪系的理論分析模型。
2) 采用Rung-Kutta算法求解得到輸入、輸出構(gòu)件的振動(dòng)加速度響應(yīng),揭示了支承剛度時(shí)變情況下的節(jié)點(diǎn)外嚙合行星輪系的動(dòng)力學(xué)特性,對(duì)比分析支承剛度時(shí)變和支承剛度定值2種情況下的振動(dòng)加速度響應(yīng),結(jié)果表明支承剛度時(shí)變情況下的振動(dòng)加速度幅值更大。
3) 利用某機(jī)械功率封閉試驗(yàn)臺(tái)開(kāi)展了驗(yàn)證試驗(yàn),基于小波變換對(duì)原始信號(hào)進(jìn)行處理獲得了較好的消噪信號(hào),試驗(yàn)結(jié)果表明方向的振動(dòng)受重力影響,振動(dòng)加速度小于方向;方向上理論值與試驗(yàn)值的誤差為16.27%,在允許范圍內(nèi),理論分析結(jié)果得到了較好的驗(yàn)證;同時(shí),支承剛度時(shí)變與定值2種情況下,前者的加速度更接近試驗(yàn)結(jié)果,表明支承剛度的時(shí)變性不可忽略。
[1] 鄭增銘, 柳青松. 少齒數(shù)漸開(kāi)線齒輪節(jié)點(diǎn)外嚙合的判定條件[J]. 蘭州工業(yè)高等專科學(xué)校學(xué)報(bào), 2004, 11(3): 13?15. ZHENG Zengming, LIU Qingsong. The judgment condition for the involute gear pair with fewer teeth number outside pitch point[J].Journal of Lanzhou Polytechnic College, 2004, 11(3): 13?15.
[2] 田靜云, 王保民, 張國(guó)海. 漸開(kāi)線圓柱齒輪出現(xiàn)節(jié)點(diǎn)外嚙合的研究[J]. 陜西理工學(xué)院學(xué)報(bào)(自然科學(xué)版), 2007, 23(2): 5?7. TIAN Jingyun, WANG Baomin, ZHANG Guohai. Study of involutes cylindrical gear-pair’s emerging node external gearing[J]. Journal of Shaanxi University of Technology (Science and Technology), 2007, 23(2): 5?7.
[3] 劉晶晶. 節(jié)點(diǎn)外嚙合齒輪副設(shè)計(jì)方法及動(dòng)力學(xué)分析[D]. 南京: 南京航空航天大學(xué)機(jī)電學(xué)院, 2012: 56?63. LIU Jingjing. Design method and dynamics analysis of node external gear-pair[D]. Nanjing:Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2012: 56?63.
[4] 孫永正. 節(jié)點(diǎn)外嚙合行星齒輪傳動(dòng)系統(tǒng)設(shè)計(jì)方法及動(dòng)力學(xué)分析[D]. 南京: 南京航空航天大學(xué)機(jī)電學(xué)院, 2013: 54?62. SUN Yongzheng. Design methods and dynamic analysis of planetary gear transmission drive with meshing beyond pitch point[D]. Nanjing:Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2013: 54?62.
[5] LIEW H V, LIM T C. Analysis of time- varying rolling element bearing characteristics[J]. Journal of Sound and Vibration, 2005, 283(3): 1163?1179.
[6] SAWALHI N, RANDALL R B. Simulating gear and bearing interactions in the presence of faults (Part I): The combined gear bearing dynamic model and the simulation of localised bearing faults[J]. Mechanical Systems and Signal Processing, 2008, 22(8): 1924?1951.
[7] 周志剛, 秦大同, 楊軍, 等. 變載荷下風(fēng)力發(fā)電機(jī)行星齒輪傳動(dòng)系統(tǒng)齒輪?軸承耦合動(dòng)力學(xué)特性[J]. 重慶大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 35(12): 7?14. ZHOU Zhigang, QIN Datong, YANG Jun, et al. Gear-bearing coupling dynamics characteristics of wind turbine planetary gear transmission system under variable load[J]. Journal of Chongqing University (Natural Science), 2012, 35(12): 7?14.
[8] 何芝仙, 干洪. 計(jì)入軸承間隙時(shí)軸?滾動(dòng)軸承系統(tǒng)動(dòng)力學(xué)行為研究[J]. 振動(dòng)與沖擊, 2009, 28(9): 120?124. HE Zhixian, GAN Hong. Dynamic behavior of a shaft-rolling bearing system with clearance[J]. Journal of Vibration and Shock, 2009, 28(9): 120?124.
[9] 李潤(rùn)方, 王建軍. 齒輪系統(tǒng)動(dòng)力學(xué)?振動(dòng)沖擊噪聲[M]. 北京: 科學(xué)出版社, 1997: 160?161. LI Runfang, WANG Jianjun. Gear system dynamics- vibration impact & noise[M]. Beijing: Science Press, 1997: 160?161.
[10] 朱恩涌, 巫世晶, 王曉筍, 等. 含摩擦力的行星齒輪傳動(dòng)系統(tǒng)非線性動(dòng)力學(xué)模型[J]. 振動(dòng)與沖擊, 2010, 29(8): 217?220.ZHU Enyong, WU Shijing, WANG Xiaosun, et al. Nonlinear dynamics model of planetary gear with friction[J]. Journal of Vibration and Shock, 2010, 29(8): 217?220.
[11] 石瑩, 江親瑜, 李寶良. 基于虛擬樣機(jī)技術(shù)的漸開(kāi)線齒輪嚙合摩擦動(dòng)力學(xué)研究[J]. 潤(rùn)滑與密封,2011, 36(7): 32?35. SHI Ying, JIANG Qinyu, LI Baoliang. Research on friction dynamics of involute gear meshing based on virtual prototyping technology[J]. Journal of Lubrication Engineering, 2011, 36(7): 32?35.
[12] 何清波, 孔凡讓, 朱忠奎, 等. 盲卷積分離及其在機(jī)械振動(dòng)信號(hào)消噪中的應(yīng)用研究[J]. 振動(dòng)與沖擊, 2006, 25(2): 30?34. HE Qingbo, KONG Fanrang, ZHU Zhongkui, et al. Blind sources separation for convolutive mixtures and its applications in mechanical vibration noise elimination[J]. Journal of Vibration and Shock, 2006, 25(2): 30?34.
[13] 王成棟, 朱永生, 張優(yōu)云. 轉(zhuǎn)子振動(dòng)信號(hào)消噪方法的研究[J]. 振動(dòng)、測(cè)試與診斷, 2003, 23(4): 252?255. WANG Chengdong, ZHU Yongsheng, ZHANG Youyun. Study on denoising rotor vibration signals contaminated by electromagnetic interference[J]. Journal of Vibration, Measurement & Diagnosis, 2003, 23(4): 252?255.
[14] 胡俊文, 周國(guó)榮. 小波分析在振動(dòng)信號(hào)去噪中的應(yīng)用[J]. 機(jī)械工程與自動(dòng)化, 2010, 2(1): 128?130. HU Junwen, ZHOU Guorong. Application of wavelet analysis in vibration signal denoising[J]. Mechanical Engineering & Automation, 2010, 2(1): 128?130.
[15] 郭亞. 振動(dòng)信號(hào)處理中的小波基選擇研究[D]. 合肥: 合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院, 2003: 16?18. GUO Ya. Research on wavelet base selection for vibration signal processing[D]. Hefei: Hefei University of Technology. SchoolofMachineryandAuto mobileEngineering, 2003: 16?18.
(編輯 陳愛(ài)華)
Theoretical and experimental analyses of coupling dynamics characteristic of planetary gear with meshing beyond pitch point
BAO Heyun, TAN Zaiyin, ZHU Rupeng, LU Fengxia
(College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Considering the time-varying support stiffness of bearings of the sun gear and the carrier, the lumped-parameter method was used to establish a coupling dynamics model of planetary gear transmission with meshing beyond pitch point. The vibration acceleration responses of the sun gear and the carrier were obtained by using Runge-Kutta method. The theoretical results show that the vibration acceleration values with time-varying support stiffness are larger than that with constant support stiffness. The experimental study using a mechanical power closed test rig was carried out. The experimental signals were denoised by the wavelet theory. There is an error of 16.27% between theoretical and experimental values in horizontal direction, which is in the allowed range; the values have large error in vertical direction due to the influence of gravity. The experiment results also show that the vibration acceleration values with the time-varying support stiffness are closer to the experimental results, which indicates that the time-variant of support stiffness is not ignorable.
meshing beyond pitch point; planetary gear; rolling element bearing; coupling dynamics; experiment
10.11817/j.issn.1672?7207.2017.08.008
TH132.413
A
1672?7207(2017)08?2016?08
2016?09?22;
2016?12?30
國(guó)家自然科學(xué)基金資助項(xiàng)目(51305196)(Project(51305196) supported by the National Natural Science Foundation of China)
鮑和云,博士,副教授,從事機(jī)械CAD及自動(dòng)化研究;E-mail:siyanger@163.com
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00