精萘提純過(guò)程控制系統(tǒng)①
2017-11-01 07:17:19史運(yùn)濤
化工自動(dòng)化及儀表 2017年6期
關(guān)鍵詞:按鈕
史運(yùn)濤 張 圓
(北方工業(yè)大學(xué)現(xiàn)場(chǎng)總線技術(shù)及自動(dòng)化重點(diǎn)實(shí)驗(yàn)室)
精萘提純過(guò)程控制系統(tǒng)①
史運(yùn)濤 張 圓
(北方工業(yè)大學(xué)現(xiàn)場(chǎng)總線技術(shù)及自動(dòng)化重點(diǎn)實(shí)驗(yàn)室)
利用Step7 V5.0和WinCC V6.2系統(tǒng),設(shè)計(jì)并實(shí)現(xiàn)了一個(gè)復(fù)雜精萘提純的生產(chǎn)過(guò)程控制和監(jiān)控系統(tǒng)。闡述了系統(tǒng)工藝流程、硬件配置、控制方案設(shè)計(jì)、軟件實(shí)現(xiàn)及其特點(diǎn)。控制系統(tǒng)主要是利用靜態(tài)矩陣和動(dòng)態(tài)矩陣來(lái)調(diào)用參數(shù),實(shí)現(xiàn)多級(jí)控制。該方案可使萘的純度達(dá)到99.8%。
過(guò)程控制系統(tǒng) 精萘提純 靜態(tài)矩陣 動(dòng)態(tài)矩陣 Step7 V5.0 WinCC V6.2
萘作為多環(huán)芳烴在精細(xì)化工中有著不可取代的獨(dú)特作用,主要用于生產(chǎn)日用品、燃料及醫(yī)藥等,例如鞣革劑、香料、植物保護(hù)劑及橡膠防老化劑等。本控制系統(tǒng)以工業(yè)萘為原料,采用獨(dú)特的降膜結(jié)晶技術(shù)制備精萘。此工藝具有操作簡(jiǎn)單、能耗低、不需要溶劑及三廢排放少等優(yōu)點(diǎn),結(jié)晶溫度為78℃,精萘純度高達(dá)99.8%。
1 工藝流程和設(shè)備簡(jiǎn)介
工藝采用獨(dú)特的降膜結(jié)晶技術(shù),降膜結(jié)晶分離過(guò)程主要經(jīng)降膜結(jié)晶、部分熔融(“發(fā)汗”)和熔化3個(gè)步驟完成。其工藝流程如圖1所示。
降膜結(jié)晶。控制系統(tǒng)原料以山東某化工廠生產(chǎn)的純度大于95%的工業(yè)萘為原料,其中雜質(zhì)主要是萘的伴生物——硫茚,二者沸點(diǎn)僅相差2℃。采用精餾技術(shù)難以分離,因此當(dāng)前工業(yè)界采用獨(dú)特的降膜結(jié)晶分離,對(duì)工業(yè)萘精制主要集中考察硫茚在結(jié)晶過(guò)程中生成的固相與液相之間的分配。萘-硫茚物系為雙組元固體溶液型,當(dāng)熔體被冷卻到固液兩相區(qū),所析出的晶體中萘含量比液相的大。若溫度降至固相線以下,熔體將全部結(jié)晶析出。實(shí)際操作中所能達(dá)到的晶體純度與熱歷程密切相關(guān),即與過(guò)程溫度變化及其發(fā)展直接相關(guān)。本控制系統(tǒng)采用七級(jí)結(jié)晶提純,可制備得到高純度的最終產(chǎn)品。
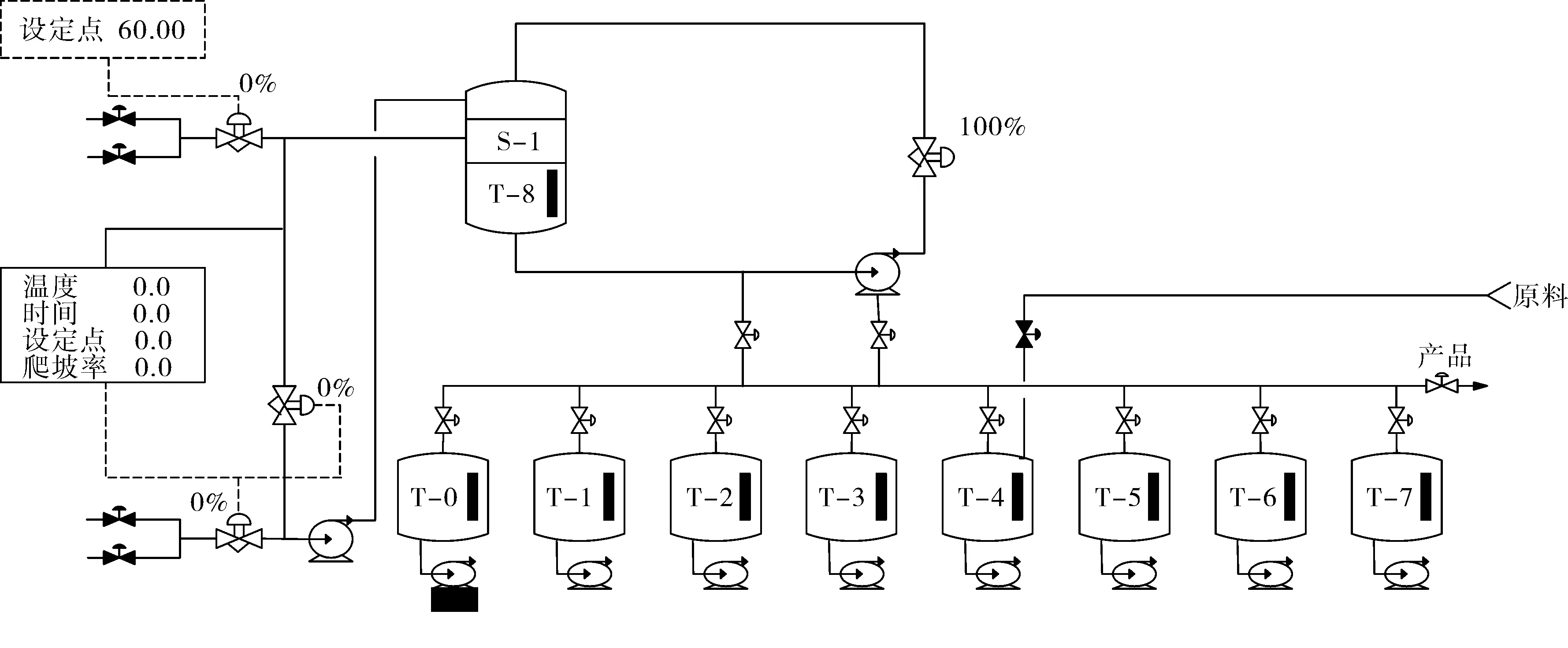
圖1 降膜結(jié)晶分離系統(tǒng)工藝流程
部分熔融(“發(fā)汗”)。結(jié)晶過(guò)程中,在晶體層間不可避免地會(huì)有一些雜質(zhì)含量較高而熔點(diǎn)較低的溶液被結(jié)晶出來(lái),導(dǎo)致晶體的純度降低。對(duì)晶層緩緩加熱,晶層受熱后部分熔化進(jìn)行“發(fā)汗”,熔化“汗液”中的萘與硫茚重新分配和富集。由于“汗液”中包含有更多的雜質(zhì),“汗液”在傳熱和傳質(zhì)推動(dòng)下逐步向晶層外排出,使晶層中的萘含量得以提高[1]。“發(fā)汗”是晶層提純的有效方法。
熔化。將換熱介質(zhì)的溫度升高, 使晶層加熱到熔點(diǎn)以上直到全部熔化。回收提純后的物料有效地強(qiáng)化了萘熔體傳熱和傳質(zhì)過(guò)程,極大地提高了萘的純度。
精萘提純系統(tǒng)主要的控制設(shè)備包括儲(chǔ)罐、泵、電磁閥、調(diào)節(jié)閥、液位傳感器、壓力傳感器、溫度傳感器和流量傳感器。
2 控制系統(tǒng)的硬件組成
AS站(Automation Station)和OS站(Operation Station)構(gòu)成兩級(jí)集散控制系統(tǒng),其結(jié)構(gòu)如圖2所示。AS站的控制器是S7-315PLC,負(fù)責(zé)現(xiàn)場(chǎng)數(shù)據(jù)采集、預(yù)處理和過(guò)程控制。OS站負(fù)責(zé)向上位機(jī)傳送數(shù)據(jù)等并負(fù)責(zé)全系統(tǒng)的監(jiān)視、操作、管理和信息綜合[2]。

圖2 控制系統(tǒng)結(jié)構(gòu)
2.1 AS站硬件配置
從工藝要求、系統(tǒng)測(cè)量的I/O點(diǎn)數(shù)、掃描速度及自診斷功能等方面考慮,AS站采用中型控制系統(tǒng)CPU315-DP PLC。它由無(wú)槽位限制的模塊式結(jié)構(gòu)組成,電源模塊(PS)、CPU和通信模塊(CP)安裝在一個(gè)導(dǎo)軌上。3個(gè)DP從站由接口模塊IM153-2(IM)、數(shù)字量和模擬量數(shù)字采集控制模塊(SM)組成,它們統(tǒng)一安裝在同一導(dǎo)軌上。模擬量輸入模塊為本安型6ES7 331-7RD00-0AB0、模擬量輸出模塊為本安型6ES7 332-5RD00-0AB0、數(shù)字量輸入模塊為6ES73211BL000AA0、數(shù)字量輸出模塊為6ES73221BL000AA0。自動(dòng)化站的結(jié)構(gòu)如圖3所示。

圖3 自動(dòng)化站結(jié)構(gòu)
開(kāi)關(guān)量輸入點(diǎn)有62個(gè),開(kāi)關(guān)量輸出點(diǎn)有43個(gè),模擬量輸入點(diǎn)有60個(gè),模擬量輸出點(diǎn)有19個(gè),共計(jì)184個(gè)。因此又?jǐn)U展了3個(gè)ET200M分布式I/O站,通過(guò)IM152-1接口模塊分別與AS站上的DP口相連接,構(gòu)成了Profibus主從網(wǎng)絡(luò)。
2.2 OS站硬件配置
按集中管理、集中顯示、分散控制的思想,系統(tǒng)設(shè)有一個(gè)工程師和一個(gè)操作員監(jiān)控站,選用西門(mén)子工控機(jī)PC RI45 Intel PIII(主頻700Hz,內(nèi)存512MByte)加三星 22寸彩色顯示器。系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)如圖4所示。工程師站和操作員站通過(guò)CP5611接口卡連接。OS站和AS站之間的通信是通過(guò)安裝在AS站導(dǎo)軌上的CPU和通信模塊CP343-5(6GK7 3435FA000XE0),把數(shù)據(jù)傳送到OS站的CP5611卡上。Profibus電纜兩頭各有一個(gè)Profibus-DP連接器,一個(gè)連接器插在通信模塊CP343-5的接口上,另一個(gè)插在CP5611卡的接口上。采用FMS文件傳輸協(xié)議與上位機(jī)OS站進(jìn)行通信。

圖4 AS和OS網(wǎng)絡(luò)結(jié)構(gòu)
3 控制方案的設(shè)計(jì)
3.1 下位機(jī)程序設(shè)計(jì)
本控制系統(tǒng)有4大控制功能:靜態(tài)矩陣、動(dòng)態(tài)矩陣、能量和原料供給、溫度矩陣。
靜態(tài)矩陣。靜態(tài)矩陣由一級(jí)矩陣組成,包括相應(yīng)的泵、開(kāi)關(guān)閥和調(diào)節(jié)閥的狀態(tài),溫度控制相位,設(shè)定點(diǎn)和設(shè)定值,手動(dòng)/自動(dòng)控制方式,所有設(shè)備的每個(gè)位置執(zhí)行的監(jiān)視時(shí)間。
動(dòng)態(tài)矩陣。動(dòng)態(tài)矩陣由7級(jí)矩陣組成,每級(jí)矩陣均包括靜態(tài)矩陣的所有內(nèi)容。
能量和原料供給。給料系統(tǒng)包含能量供給值、溫度控制相位、兩個(gè)產(chǎn)品設(shè)定點(diǎn)和設(shè)點(diǎn)值、每個(gè)位置監(jiān)視點(diǎn)。能量供給由純凈水和蒸汽組成,它們分別通過(guò)蒸汽儲(chǔ)罐和管道控制相應(yīng)電動(dòng)閥門(mén)在需要時(shí)供給。原料供給由圖1中的T-4罐注入。
溫度矩陣。溫度控制矩陣由調(diào)節(jié)閥控制調(diào)節(jié)溫度,在不同時(shí)期控制料罐的溫度。每個(gè)位置完成不同相位,不同相位溫度控制有不同溫度爬坡率,使溫度逐漸達(dá)到所要求的溫度值。通過(guò)4次循環(huán),多級(jí)發(fā)汗結(jié)晶把工業(yè)生產(chǎn)的萘經(jīng)過(guò)多級(jí)提純達(dá)到所希望的純度。
3.2 上位機(jī)工程師站(ES)、OS監(jiān)控程序設(shè)計(jì)
上位機(jī)ES站的主要功能是對(duì)PLC(Step7 V5.0 SP2硬件)進(jìn)行組態(tài)、編程和網(wǎng)絡(luò)組態(tài)。硬件組態(tài)包括通信模塊數(shù)據(jù)采集,控制模塊的地址、參數(shù)類型、參數(shù)配置、采集的數(shù)據(jù)類型。網(wǎng)絡(luò)組態(tài)包括網(wǎng)絡(luò)參數(shù)、網(wǎng)絡(luò)地址和網(wǎng)絡(luò)速度。組態(tài)完成后,Step7軟件進(jìn)行程序下裝也可進(jìn)行在線修改。
3.2.1 溫度矩陣
溫度矩陣分為兩大部分,第1部分為T(mén)ICRA-200的溫度矩陣,第2部分為T(mén)ICRA-235的溫度矩陣。在TICRA-200的溫度矩陣中可進(jìn)行起始溫度、爬坡速率、操作矩陣、工作區(qū)參數(shù)的分配。在TICRA-235的溫度矩陣中可進(jìn)行時(shí)間、溫度、操作矩陣和工作區(qū)參數(shù)的分配。在兩個(gè)矩陣中都可進(jìn)行操作矩陣和工作區(qū)的讀寫(xiě)。
3.2.2 動(dòng)態(tài)矩陣
動(dòng)態(tài)矩陣中可進(jìn)行開(kāi)關(guān)閥、調(diào)節(jié)閥、泵的操作,可進(jìn)行給料、能量、狀態(tài)、設(shè)定值、監(jiān)視時(shí)間、操作矩陣和工作區(qū)參數(shù)的分配,可進(jìn)行操作矩陣和工作區(qū)的讀寫(xiě),其工作流程界面如圖5所示。

圖5 動(dòng)態(tài)矩陣流程界面
3.2.3 靜態(tài)矩陣
靜態(tài)矩陣中可進(jìn)行開(kāi)關(guān)閥、調(diào)節(jié)閥、泵的操作,可進(jìn)行能量、狀態(tài)、設(shè)定值、監(jiān)視時(shí)間、操作矩陣和工作區(qū)參數(shù)的分配,可進(jìn)行操作矩陣和工作區(qū)的讀寫(xiě)。
在溫度矩陣、動(dòng)態(tài)矩陣、靜態(tài)矩陣這3個(gè)界面中點(diǎn)擊操作矩陣按鈕彈出操作矩陣面板。
在動(dòng)態(tài)流程圖、靜態(tài)流程圖、能量流程圖、溫度矩陣、動(dòng)態(tài)矩陣、靜態(tài)矩陣這6個(gè)界面中有動(dòng)態(tài)開(kāi)車(chē)、停車(chē)和靜態(tài)開(kāi)車(chē)、停車(chē)小面板。點(diǎn)擊右上角的啟動(dòng)/停止下方的SEQ1可調(diào)出動(dòng)態(tài)開(kāi)車(chē)、停車(chē)小面板,點(diǎn)擊SEQ2可調(diào)出靜態(tài)開(kāi)車(chē)、停車(chē)小面板。點(diǎn)擊小面板中的開(kāi)車(chē)、停車(chē)按鈕可進(jìn)行開(kāi)停車(chē)操作。在SEQ1、SEQ2右側(cè)的顯示框內(nèi)直接賦值同樣可以開(kāi)停車(chē),輸入1為開(kāi)車(chē),輸入0為停車(chē)。
界面的左下方顯示的是配套蒸汽、罐區(qū)蒸汽、新鮮水、循環(huán)水和主蒸汽的累計(jì)值;點(diǎn)擊全部清零按鈕,這5個(gè)累計(jì)值同時(shí)清零;點(diǎn)擊開(kāi)始累計(jì)按鈕,這5個(gè)累計(jì)值同時(shí)開(kāi)始累計(jì),投料量、產(chǎn)品產(chǎn)量和殘液產(chǎn)量分別清零。
3.2.4 PID參數(shù)調(diào)節(jié)界面、控制回路面板
在PID參數(shù)調(diào)節(jié)界面和控制回路面板中可以給設(shè)定值SP、輸出值OP、比例系數(shù)Kc、積分時(shí)間Ti、微分時(shí)間Td賦值,并可以進(jìn)行手動(dòng)和自動(dòng)的切換。此界面最上方左側(cè)為回路的工號(hào)和位號(hào);接下來(lái)是該回路的設(shè)定值SP、過(guò)程值PV和輸出值OP的數(shù)值和棒形圖顯示,并且分別標(biāo)有工程單位、工程刻度和百分度。將鼠標(biāo)放在SP值或OP值的方框上,屏幕上將出現(xiàn)一綠色大寫(xiě)字母I,點(diǎn)擊該方框,相應(yīng)區(qū)域變色,即可輸入數(shù)值。當(dāng)回路處于自動(dòng)狀態(tài)時(shí),閥門(mén)的輸出值是由計(jì)算機(jī)給出的,當(dāng)回路處于手動(dòng)狀態(tài)時(shí),閥門(mén)的輸出值是由操作人員給出的。OP值下方的滾動(dòng)條為手動(dòng)輸出值,用鼠標(biāo)單擊滾動(dòng)條兩旁的箭頭或直接拖動(dòng)滾動(dòng)條中間的小方塊可以修改該值。滾動(dòng)條下方為自動(dòng)、手動(dòng)按鈕,將鼠標(biāo)移動(dòng)到自動(dòng)按鈕的上方,出現(xiàn)一個(gè)綠色的閃電箭頭,點(diǎn)擊該按鈕,完成操作后按鈕上的自動(dòng)二字由黑色變?yōu)榧t色,同時(shí)手動(dòng)按鈕上的手動(dòng)二字由紅色變?yōu)楹谏芈返臓顟B(tài)也隨之改變?yōu)樽詣?dòng)。點(diǎn)擊手動(dòng)按鈕的動(dòng)作與點(diǎn)擊自動(dòng)按鈕相同,完成操作后按鈕上的兩個(gè)字變色,同時(shí)回路的狀態(tài)也隨之改變?yōu)槭謩?dòng)。對(duì)于各控制回路來(lái)說(shuō),不要隨意修改比例系數(shù)Kc、積分時(shí)間Ti和微分時(shí)間Td。如果需要修改,應(yīng)與工程師聯(lián)系。修改方法與輸入SP、OP值的方法相同。
3.2.5 自動(dòng)開(kāi)車(chē)界面
在此界面中可以設(shè)定動(dòng)態(tài)的開(kāi)停車(chē)循環(huán)、階段、位置及運(yùn)行時(shí)間等參數(shù),還可以設(shè)定靜態(tài)的開(kāi)停車(chē)狀態(tài)、運(yùn)行時(shí)間等參數(shù)。將鼠標(biāo)放在數(shù)值的方框上,屏幕上將出現(xiàn)一綠色大寫(xiě)字母I,點(diǎn)擊該方框,相應(yīng)區(qū)域變色,即可輸入數(shù)值進(jìn)行賦值。
4 軟件實(shí)現(xiàn)
控制模式有4種,分別為自動(dòng)模式、手動(dòng)模式、暫停模式和關(guān)機(jī)模式。
自動(dòng)模式時(shí),Sequencer1的值為1,自動(dòng)調(diào)取該級(jí)矩陣數(shù)據(jù)。第1步,在自動(dòng)模式下Sequencer1執(zhí)行當(dāng)前位置,即它激活在操作矩陣中指定的設(shè)備位置。如果位置指定了能量狀態(tài)的變化,Sequencer1將請(qǐng)求能量交換程序去改變相應(yīng)的狀態(tài)。第2步,等待設(shè)定值到達(dá)操作矩陣的規(guī)定值,設(shè)定值在指定操作矩陣中。Sequencer1會(huì)花大部分的時(shí)間在這一步進(jìn)行等待,連續(xù)檢查該設(shè)定值。操作員可以在這一時(shí)間段內(nèi)操作設(shè)備。第3步,該矩陣準(zhǔn)備執(zhí)行下一個(gè)位置,即計(jì)算下一個(gè)周期、階段和執(zhí)行位置。這3個(gè)步驟重復(fù)進(jìn)行,直到完成所有矩陣位置的檢測(cè),Sequencer1進(jìn)入手動(dòng)模式。
手動(dòng)模式時(shí),Sequencer1的值為0并進(jìn)行等待,不以任何方式控制運(yùn)行過(guò)程。操作員可以手動(dòng)重啟Sequencer1,設(shè)置其周期、階段和位置。如果不存在指定的結(jié)束周期、階段和位置,Sequencer1會(huì)停留在自動(dòng)模式,直到由操作員手動(dòng)停止。
暫停模式跟自動(dòng)模式是一樣的,不同點(diǎn)是Sequencer1的設(shè)定值已經(jīng)達(dá)到矩陣的規(guī)定值時(shí),它不會(huì)自動(dòng)執(zhí)行下一個(gè)位置。操作員可以手動(dòng)關(guān)閉暫停狀態(tài)并且Sequencer1可自動(dòng)進(jìn)行到下一個(gè)位置。
關(guān)機(jī)模式是通過(guò)Sequencer1向操作員發(fā)出請(qǐng)求,進(jìn)入關(guān)閉狀態(tài),它將設(shè)備設(shè)定在預(yù)定義的狀態(tài)上,然后Sequencer1進(jìn)入手動(dòng)模式。
處理數(shù)據(jù)保存在數(shù)組中,有兩組數(shù)組。一組保存操作矩陣數(shù)據(jù),如圖6所示。另一組存儲(chǔ)并運(yùn)行臨時(shí)數(shù)據(jù),它被稱為工作矩陣,如圖7所示。工作矩陣用于臨時(shí)數(shù)據(jù)的存儲(chǔ),當(dāng)一個(gè)新的階段開(kāi)始時(shí),該階段的操作矩陣數(shù)據(jù)被復(fù)制到工作矩陣中并且所有的后續(xù)動(dòng)作都按照工作矩陣中的數(shù)據(jù)進(jìn)行工作。

圖6 操作矩陣向工作矩陣裝載

圖7 工作矩陣執(zhí)行
5 結(jié)束語(yǔ)
對(duì)山東某公司工業(yè)萘深加工為精萘提純改造工程,提出一種動(dòng)態(tài)矩陣控制方法。該方法通過(guò)調(diào)用不同的矩陣來(lái)快速調(diào)節(jié)參數(shù),從而實(shí)現(xiàn)多級(jí)控制。該工程是由原來(lái)的TI系列控制器,采用兩臺(tái)CPU通過(guò)點(diǎn)對(duì)點(diǎn)的通信方式、APT軟件實(shí)現(xiàn)PCS系統(tǒng),改造升級(jí)為S7-315PLC一套系統(tǒng)控制。改造完成后不但系統(tǒng)功能有了顯著提升,網(wǎng)絡(luò)速度也有所提高。目前運(yùn)行情況良好,完全達(dá)到預(yù)期的控制目標(biāo),使萘的純度提高到99.8%,減少了工業(yè)雜質(zhì)排放,達(dá)到了節(jié)能環(huán)保的目的。該系統(tǒng)的控制方法在我國(guó)化工應(yīng)用領(lǐng)域有普遍推廣和實(shí)用價(jià)值。
[1] 張建文,張政,秦霽光.降膜結(jié)晶分離技術(shù)實(shí)驗(yàn)研究[J].過(guò)程工程學(xué)報(bào),1999,20(1):17~24.
[2] 何益,胡姍姍,劉增強(qiáng).基于PLC和WinCC的化工精餾塔控制系統(tǒng)設(shè)計(jì)[J].化工自動(dòng)化及儀表,2011,38(6):710~712.
ControlSystemforRefinedNaphthalenePurificationProcess
SHI Yun-tao, ZHANG Yuan
(KeyLaboratoryofField-busTechnologyandAutomationinNorthChinaUniversityofTechnology)
Having Step7 V5.0 and WinCC V6.2 systems adopted to design a complex process control and monitoring system for refined naphthalene purification was implemented, including the description of the system’s technological process, hardware configuration, control scheme design, software implementation and characteristics. This system mainly makes use of static matrix and dynamic matrix to call parameters and to achieve multilevel control. This program can achieve control objectives desired and make the purity of naphthalene come up to 99.8%.
process control system,refined naphthalene purification,static matrix, dynamic matrix, Step7 V5.0,WinCC V6.2
史運(yùn)濤(1975-),教授,從事隨機(jī)混雜系統(tǒng)的故障診斷與容錯(cuò)控制,風(fēng)力發(fā)電系統(tǒng)故障診斷與容錯(cuò)控制,鋼鐵行業(yè)、有色冶金行業(yè)復(fù)雜工業(yè)過(guò)程的建模、仿真與優(yōu)化控制的研究。
聯(lián)系人張圓(1993-),碩士研究生,從事隨機(jī)混雜系統(tǒng)的故障診斷與容錯(cuò)控制,風(fēng)力發(fā)電系統(tǒng)故障診斷與容錯(cuò)控制,工業(yè)過(guò)程控制的研究,claire0512@qq.com。
TH865
B
1000-3932(2017)06-0534-05
2017-01-01,
2017-05-02)
猜你喜歡
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創(chuàng)新報(bào)(2024年23期)2024-07-12 00:00:00
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
奧秘(創(chuàng)新大賽)(2019年12期)2019-11-29 18:26:17
模具制造(2019年7期)2019-09-25 07:30:00
少年文藝·我愛(ài)寫(xiě)作文(2017年6期)2017-06-12 23:21:56
商業(yè)評(píng)論(2014年9期)2015-02-28 04:32:41
中學(xué)語(yǔ)文(2013年35期)2013-11-14 03:29:12
移動(dòng)一族(2008年9期)2008-12-31 00:00:00
看世界(2004年9期)2004-04-29 00:00:00