基于K-均值聚類(lèi)算法的岸橋載荷分類(lèi)識(shí)別
2017-11-01 08:58:01張冰倩
張冰倩, 胡 雄, 唐 剛
(上海海事大學(xué) 物流研究中心, 上海 201306)
基于K-均值聚類(lèi)算法的岸橋載荷分類(lèi)識(shí)別
張冰倩, 胡 雄, 唐 剛
(上海海事大學(xué) 物流研究中心, 上海 201306)
為了探究岸邊集裝箱岸橋每次作業(yè)的載荷情況, 提高對(duì)使用壽命評(píng)估的準(zhǔn)確性, 運(yùn)用K-均值聚類(lèi)算法與定量統(tǒng)計(jì)分析方法, 對(duì)岸橋起升電機(jī)的徑向和軸向振動(dòng)烈度進(jìn)行研究.建立了起升電機(jī)振動(dòng)烈度與岸橋載荷狀態(tài)的數(shù)學(xué)模型和振動(dòng)烈度徑向與軸向的相關(guān)性模型, 提出了岸橋載荷分類(lèi)識(shí)別方法.通過(guò)實(shí)時(shí)數(shù)據(jù)驗(yàn)證, 該分類(lèi)方法能夠很好地代表岸橋的實(shí)時(shí)工作狀態(tài), 對(duì)于岸橋載荷狀態(tài)的正確分類(lèi)和工程應(yīng)用中的監(jiān)測(cè)與評(píng)估具有重要意義.
集裝箱岸橋; K-均值聚類(lèi); 振動(dòng)信號(hào); 載荷分類(lèi); 相關(guān)性分析
目前, 人們對(duì)岸橋的需求日益增長(zhǎng), 但其使用壽命的評(píng)估方法缺乏科學(xué)依據(jù), 仍存在很大的問(wèn)題[1].岸橋的工作壽命與其每次作業(yè)的實(shí)際載荷有很強(qiáng)的關(guān)聯(lián), 任何一種壽命評(píng)估方法都必須掌握岸橋的實(shí)際載荷才能進(jìn)行準(zhǔn)確的評(píng)估.然而, 傳統(tǒng)的岸橋工作壽命評(píng)估方法往往缺少一定的現(xiàn)場(chǎng)實(shí)際數(shù)據(jù)支持及實(shí)驗(yàn)驗(yàn)證[2-4].
現(xiàn)場(chǎng)實(shí)際數(shù)據(jù)與實(shí)驗(yàn)驗(yàn)證只能通過(guò)記錄本上的數(shù)據(jù)得知岸橋每段時(shí)間內(nèi)的總裝載量, 而無(wú)法得知岸橋每次作業(yè)的載荷數(shù)據(jù).經(jīng)研究分析可知, 起升電機(jī)振動(dòng)信號(hào)與岸橋每次作業(yè)的實(shí)際載荷呈非線(xiàn)性關(guān)系[5], 即可以通過(guò)對(duì)起升電機(jī)振動(dòng)能量進(jìn)行實(shí)時(shí)分析, 得出岸橋的每次載荷情況, 進(jìn)而為評(píng)估岸橋的使用壽命提供可靠數(shù)據(jù), 并提高評(píng)估的準(zhǔn)確度.
現(xiàn)場(chǎng)采集到的岸橋數(shù)據(jù)日益增長(zhǎng), 因此選擇正確的數(shù)據(jù)分析方法至關(guān)重要[6]. K-均值聚類(lèi)算法是最流行和最有效的聚類(lèi)方法之一[7-8].因此, 本文提出了一種基于K-均值聚類(lèi)算法的集裝箱岸橋載荷分類(lèi)識(shí)別方法, 該方法能夠有效解決岸橋每次作業(yè)的載荷統(tǒng)計(jì)分析的難題, 即對(duì)電機(jī)振動(dòng)烈度的一組數(shù)據(jù)進(jìn)行聚類(lèi)分析, 得出該電機(jī)的載荷分類(lèi)情況, 將岸橋的每次作業(yè)進(jìn)行分類(lèi), 可為岸橋使用壽命的評(píng)估提供參考數(shù)據(jù).本文的研究技術(shù)路線(xiàn)如圖1所示.
1 載荷分類(lèi)技術(shù)研究
1.1岸橋載荷與電機(jī)振動(dòng)模型建立
本文所分析的數(shù)據(jù)均來(lái)自于NetCMAS(network condition monitoring and assessment system)中某起升電機(jī)一個(gè)測(cè)點(diǎn)的徑向與軸向的實(shí)時(shí)振動(dòng)烈度信號(hào).由于振動(dòng)信號(hào)所表達(dá)的振動(dòng)信息具有多樣化和信息量大的特點(diǎn), 因此,可通過(guò)分析起升電機(jī)的振動(dòng)信號(hào)來(lái)獲取岸橋載荷的相關(guān)信息, 提高信息的利用率.岸橋的電機(jī)一般為三相異步電動(dòng)機(jī),根據(jù)三相異步電動(dòng)機(jī)的機(jī)械特性可知, 岸橋的載荷與起升電機(jī)的輸入功率呈正比, 輸入功率Pem與電磁轉(zhuǎn)矩Tem呈正比, 輸入功率Pem與轉(zhuǎn)差率s呈反比.綜上, 電磁轉(zhuǎn)矩可用式(1)計(jì)算.
(1)

圖2為三相異步電機(jī)的機(jī)械特性曲線(xiàn), 其橫坐標(biāo)為電磁轉(zhuǎn)矩Tem, 縱坐標(biāo)為轉(zhuǎn)差率s.圖2中:TN為額定轉(zhuǎn)矩,Tst為起動(dòng)轉(zhuǎn)矩,Tm為最大電磁轉(zhuǎn)矩,sm為臨界轉(zhuǎn)差率.
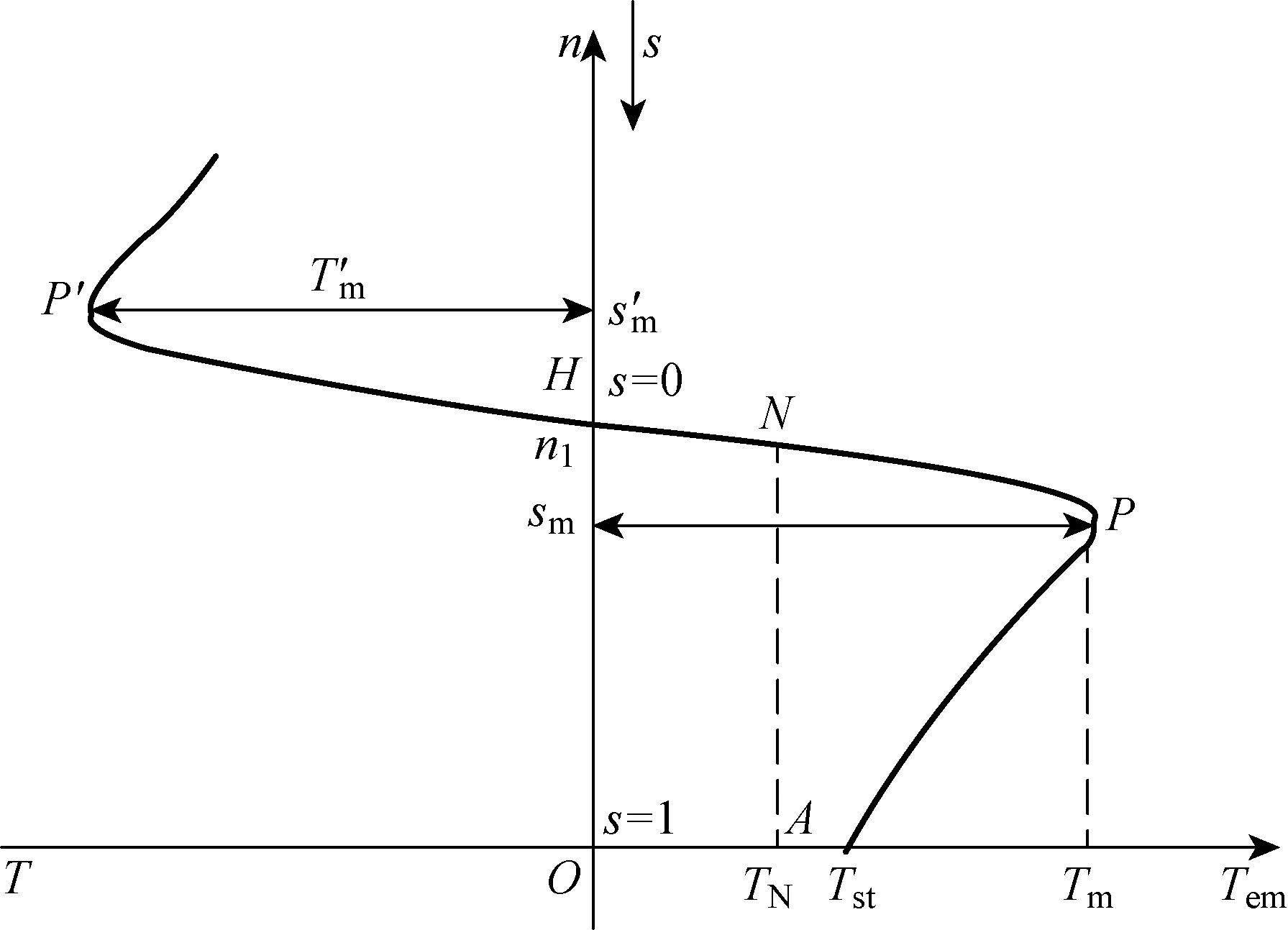
圖2 三相異步電機(jī)的機(jī)械特性Fig.2 Mechanical characteristics of three-phase asynchronous motor
(2)

綜上所述, 岸橋載荷(load)與電機(jī)振動(dòng)(vibration)的數(shù)學(xué)模型如下:
load∝P1∝I1∝B1∝vibration
(3)
根據(jù)以上數(shù)學(xué)模型可知, 隨著起升電機(jī)載荷的增大, 起升電機(jī)的振幅也會(huì)增加[9].因此, 為探討其載荷類(lèi)別, 本文選取了起升電機(jī)徑向與軸向振動(dòng)烈度數(shù)據(jù)作為研究樣本.為了探究起升電機(jī)徑向與軸向振動(dòng)烈度數(shù)據(jù)是否具有關(guān)聯(lián), 本文對(duì)兩者進(jìn)行了相關(guān)性分析.
1.2相關(guān)性分析
本文運(yùn)用R語(yǔ)言作圖, 采用SPSS軟件進(jìn)行相關(guān)性分析. 軸向振動(dòng)烈度為自變量x, 徑向振動(dòng)烈度為因變量y, 軸向振動(dòng)烈度隨徑向振動(dòng)烈度變化趨勢(shì)如圖3所示. 由圖3可知,起升電機(jī)的一個(gè)測(cè)點(diǎn)的軸向與徑向振動(dòng)信號(hào)存在顯著正相關(guān)的關(guān)系.
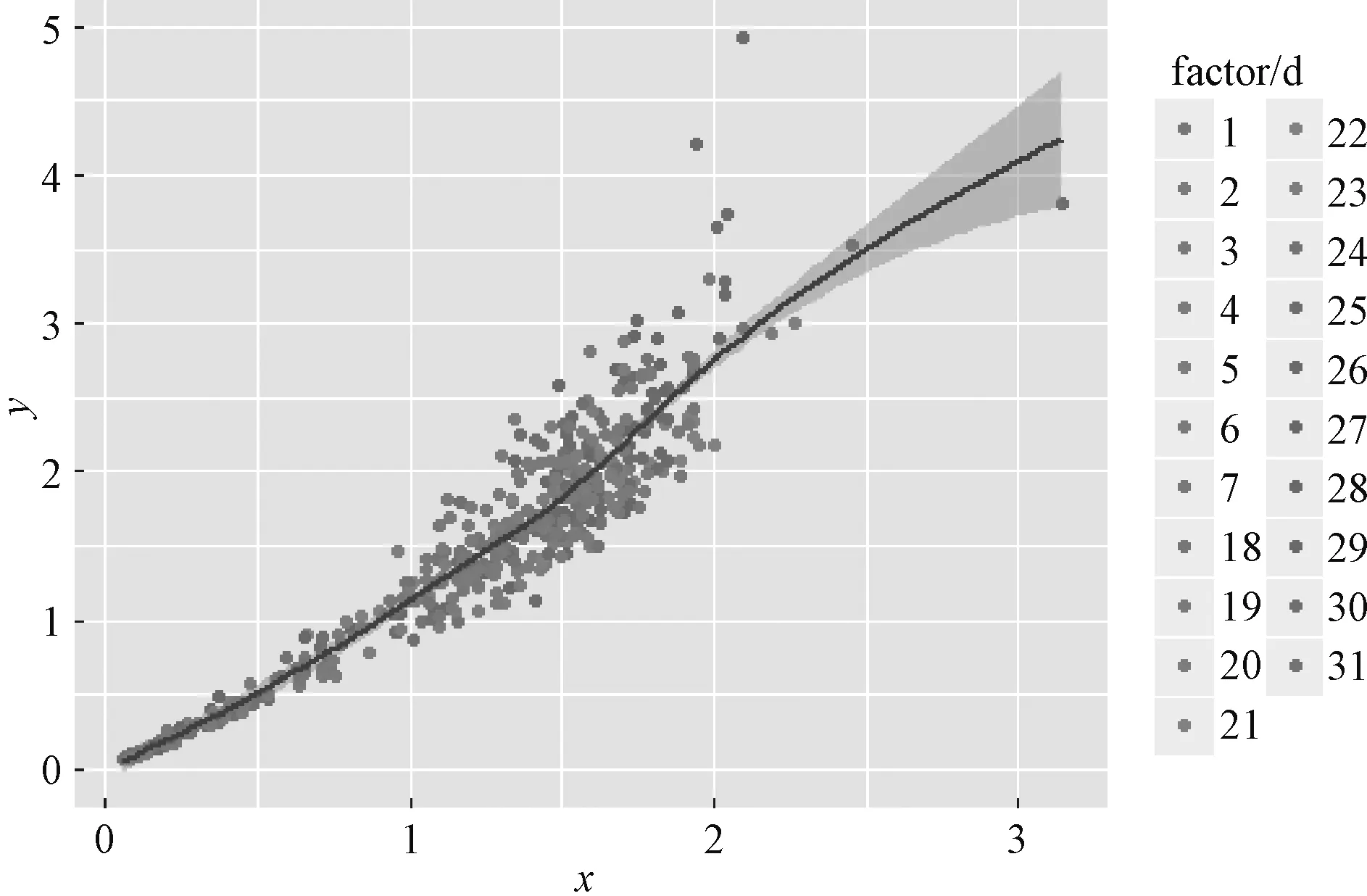
圖3 軸向振動(dòng)烈度隨徑向振動(dòng)烈度變化趨勢(shì)Fig.3 Variation tendency of axial vibration intensity with radial vibration intensity
運(yùn)用SPSS進(jìn)行分析得出徑向與軸向的Person相關(guān)性值為0.964, 表明徑向與軸向振動(dòng)信號(hào)也呈顯著正相關(guān)性, 且是線(xiàn)性相關(guān)關(guān)系.徑向與軸向振動(dòng)信號(hào)相關(guān)性檢驗(yàn)結(jié)果如表1所示.
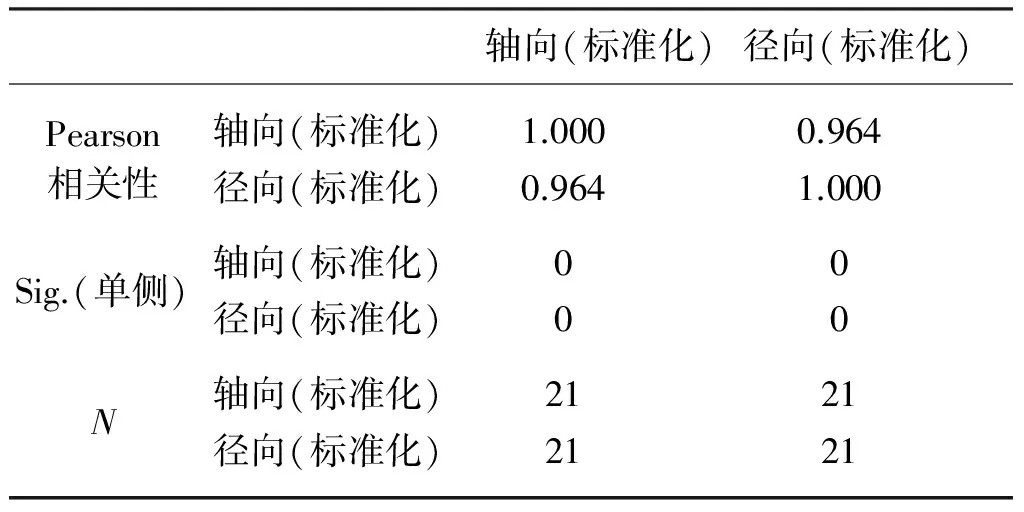
表1 徑向與軸向振動(dòng)信號(hào)相關(guān)性檢驗(yàn)Table 1 Correlation test between axial and radial vibration signal
為了建立徑向與軸向振動(dòng)烈度的定量模型, 本文建立了一元線(xiàn)性回歸模型, 軸向數(shù)據(jù)為自變量, 徑向數(shù)據(jù)為因變量,x非標(biāo)準(zhǔn)化系數(shù)為0.895, 常數(shù)項(xiàng)為0.151, 該模型的顯著性水平Sig.值為0, 表明徑向與軸向是顯著相關(guān)的.軸向振動(dòng)烈度隨徑向振動(dòng)烈度變化的回歸分析結(jié)果如表2所示, 通過(guò)測(cè)量徑向的振動(dòng)烈度值, 代入公式計(jì)算軸向的值, 測(cè)量工作可以得到簡(jiǎn)化.
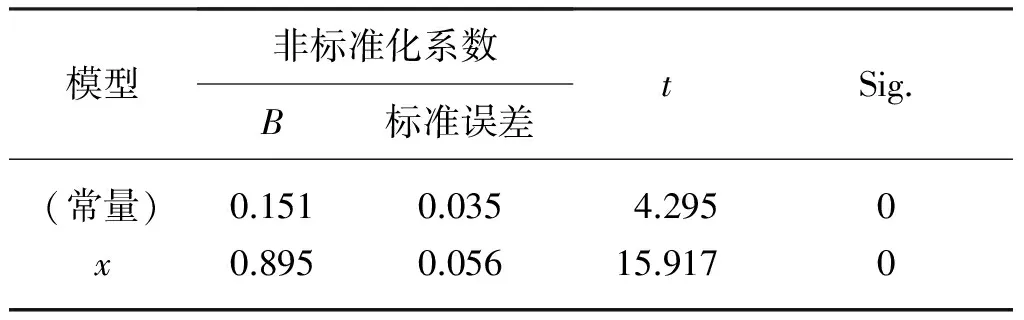
表2 軸向振動(dòng)烈度隨徑向振動(dòng)烈度變化的回歸分析Table 2 Regression analysis of axial vibration intensity with the Change of radial vibration intensity
經(jīng)統(tǒng)計(jì)分析, 可將徑向與軸向振動(dòng)信號(hào)建立數(shù)學(xué)模型, 如式(4)所示.
y=0.895x+0.151
(4)
式中:x為軸向振動(dòng)烈度;y為徑向振動(dòng)烈度.
式(4)僅適用于某測(cè)點(diǎn)的振動(dòng)傳感器所測(cè)得的數(shù)據(jù), 若傳感器擺放位置改變, 式(4)中的系數(shù)會(huì)相應(yīng)改變, 但是測(cè)點(diǎn)振動(dòng)信號(hào)徑向與軸向數(shù)據(jù)的變化趨勢(shì)仍保持一致.
1.3岸橋載荷分類(lèi)
本文將起升電機(jī)的載荷分為5類(lèi), 分別代表5種典型的工作狀態(tài). 起升電機(jī)的工作周期定義為24 h, 起升電機(jī)的循環(huán)工作狀態(tài)將由5種典型的載荷特征擬合而成.
(1) 空載: 空閑;
(2) 輕載: 很少起升額定載荷, 一般起升輕微載荷;
(3) 中載: 有時(shí)起升額定載荷, 一般起升中等載荷;
(4) 重載: 經(jīng)常起升額定載荷;
(5) 超重載: 頻繁起升額定載荷.
2 工程應(yīng)用驗(yàn)證
2.1數(shù)據(jù)采集
NetCMAS已在國(guó)內(nèi)外集裝箱公司等大型企業(yè)得到了有效的應(yīng)用, 實(shí)現(xiàn)了設(shè)備狀態(tài)分析與管理思想的程序化[10]. NetCMAS在數(shù)據(jù)的自動(dòng)獲取有效分析與管理上為設(shè)備工程師提供了一個(gè)技術(shù)先進(jìn)的實(shí)用方法和工具. NetCMAS數(shù)據(jù)處理的特點(diǎn)是邊采集邊處理信號(hào), 對(duì)于每種信號(hào)采集和存儲(chǔ)的時(shí)間都不相同.由于系統(tǒng)采集的數(shù)據(jù)是實(shí)時(shí)的, 那么信號(hào)中就包含工作和非工作兩種狀態(tài)的信號(hào), 以及干擾信號(hào).
本文所分析的數(shù)據(jù)均來(lái)自于NetCMAS中某起升電機(jī)一個(gè)測(cè)點(diǎn)的徑向與軸向的實(shí)時(shí)振動(dòng)信號(hào), 選取時(shí)間為2010年1月18日14時(shí)至2010年2月7日23時(shí), 為期3周, 比較具有代表性.
2.2數(shù)據(jù)預(yù)處理
由NetCMAS采集到的實(shí)時(shí)數(shù)據(jù)通常包含異常數(shù)據(jù)、重復(fù)數(shù)據(jù)或者缺失數(shù)據(jù), 因此不能直接用于分解處理.本文中, 起重機(jī)具有高速、重載和大沖擊的工作特點(diǎn), 因此,經(jīng)過(guò)NetCMAS所采集的實(shí)時(shí)信號(hào)必須經(jīng)過(guò)預(yù)處理.
2.3方法的驗(yàn)證
2.3.1 數(shù)據(jù)歸一化處理
本文對(duì)數(shù)據(jù)進(jìn)行描述性統(tǒng)計(jì), 將其歸一化限制在0~1范圍內(nèi), 便于后序數(shù)據(jù)處理, 保證程序運(yùn)行時(shí)收斂加快, 降低運(yùn)算時(shí)間.
首先, 對(duì)每小時(shí)的數(shù)據(jù)加以統(tǒng)計(jì)并取其平均值, 代表起升電機(jī)徑向與軸向振動(dòng)烈度信號(hào), 共計(jì)490組, 并執(zhí)行描述性統(tǒng)計(jì)量分析, 其輸出結(jié)果如表3所示.由表3可知,徑向最大值為3.14, 軸向最大值為4.93, 這為數(shù)據(jù)歸一化提供了有效的尺度.徑向數(shù)據(jù)的全距為3.09, 軸向數(shù)據(jù)的全距為4.86, 數(shù)量級(jí)變化不大, 滿(mǎn)足K-均值聚類(lèi)分析的條件.標(biāo)準(zhǔn)差分別為0.61和0.87, 數(shù)據(jù)總體較為平穩(wěn).對(duì)490組數(shù)據(jù)進(jìn)行分析得出1組數(shù)據(jù)為離群點(diǎn), 為了避免影響聚類(lèi)效果, 在聚類(lèi)分析前將這一組數(shù)據(jù)予以剔除處理.

表3 軸向振動(dòng)烈度隨徑向振動(dòng)烈度描述性統(tǒng)計(jì)量分析Table 3 Descriptive statistics analysis of axial vibration intensity with radial vibration intensity
其次, 對(duì)每天的數(shù)據(jù)加以統(tǒng)計(jì)取平均值便于K-均值聚類(lèi)分析.
由表3可知, 將數(shù)據(jù)按每小時(shí)取均值后, 振動(dòng)烈度徑向信號(hào)的最大值為3.14, 軸向信號(hào)的最大值為4.93.本文用最大值對(duì)數(shù)據(jù)進(jìn)行歸一化處理, 即把每個(gè)值除以最大值, 所得數(shù)據(jù)便是歸一化后的結(jié)果.經(jīng)驗(yàn)證, 數(shù)據(jù)歸一化便于進(jìn)行K-均值聚類(lèi)分析與一般意義上的應(yīng)用.對(duì)2010年1月18日至2010年2月7日每日的數(shù)據(jù)取均值后, 其最大值分別為1.6459與2.3149, 經(jīng)歸一化后的結(jié)果如表4所示.
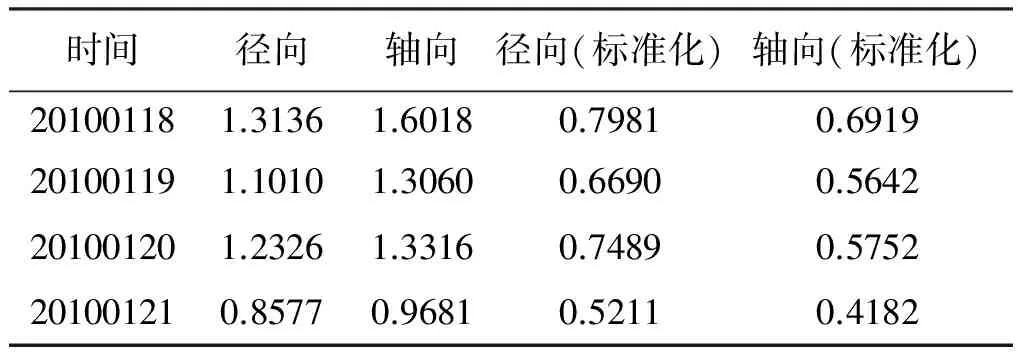
表4 2010年1月18日至2010年2月7日數(shù)據(jù)歸一化Table 4 Data normalization from Jan.18, 2010 to Feb.7, 2010

(續(xù) 表)
2.3.2 基于K-均值聚類(lèi)分析的載荷分類(lèi)識(shí)別
本文通過(guò)K-均值聚類(lèi)法將21組數(shù)據(jù)進(jìn)行分類(lèi), 設(shè)置時(shí)間為分類(lèi)變量, 起升電機(jī)的徑向與軸向振動(dòng)信號(hào)為自變量, 分出5個(gè)類(lèi)別, 起升電機(jī)振動(dòng)烈度K-均值聚類(lèi)結(jié)果如表5所示.由表5可知,有效數(shù)據(jù)為21組, 缺失數(shù)據(jù)為1組.其中2010年1月25日為奇異點(diǎn), 該天的徑向與軸向振動(dòng)烈度均為最大值, 采取剔除處理.

表5 起升電機(jī)振動(dòng)烈度K-均值聚類(lèi)Table 5 Hoist motor vibration intensity K-means clustering
根據(jù)上文建立的振動(dòng)與載荷的數(shù)學(xué)模型vibration ∝ load、起升電機(jī)徑向與軸向的振動(dòng)信號(hào)相關(guān)性數(shù)學(xué)模型y=0.895x+0.151, 結(jié)合K-均值聚類(lèi)分析的結(jié)果, 本文將起升電機(jī)的載荷狀態(tài)定義為表6中的5類(lèi).
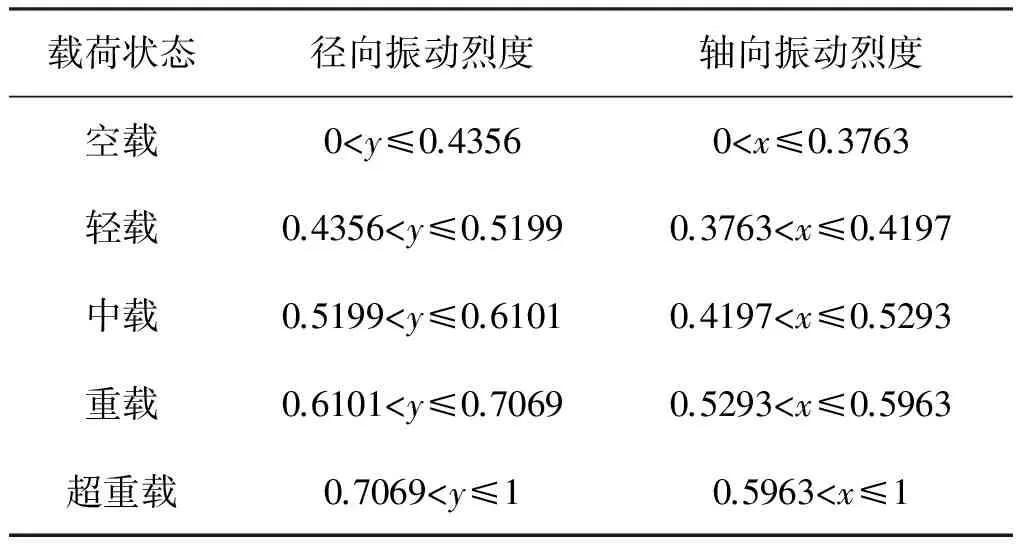
表6 起升電機(jī)載荷分類(lèi)標(biāo)準(zhǔn)Table 6 Classification standard of hoist motor load
軸向振動(dòng)烈度與徑向振動(dòng)烈度呈顯著正相關(guān), 因此,在實(shí)際工程應(yīng)用中, 只需要測(cè)其中一個(gè)方向的振動(dòng)烈度值, 再根據(jù)本文推導(dǎo)得出的公式y(tǒng)=0.895x+0.151可計(jì)算得出另一個(gè)方向的振動(dòng)烈度的值.根據(jù)以上思路, 可以將x、y兩個(gè)變量的范圍轉(zhuǎn)換為一個(gè)變量的范圍進(jìn)行約束計(jì)算, 這個(gè)方法將大大減少計(jì)算量, 提高計(jì)算的速率.
為了驗(yàn)證起升電機(jī)載荷分類(lèi)結(jié)果的可靠性, 分別根據(jù)徑向和軸向的振動(dòng)強(qiáng)度進(jìn)行分類(lèi).徑向與軸向分類(lèi)結(jié)果匹配度列于表7中, 結(jié)果表明, 軸向分類(lèi)結(jié)果幾乎與徑向的分類(lèi)結(jié)果相符.因此, 可以使用其中一個(gè)方向的數(shù)據(jù)進(jìn)行研究.

表7 徑向與軸向分類(lèi)結(jié)果匹配度Table 7 Radial and axial classification results matching degree
該分類(lèi)結(jié)果結(jié)合了多種分析方法, 比較具有可靠性.由于起升電機(jī)存在差異, 其重載情況下的振動(dòng)上限將會(huì)存在巨大差異, 會(huì)導(dǎo)致評(píng)估準(zhǔn)確降低, 本文的聚類(lèi)分析把重點(diǎn)放在空載、輕載、中載等級(jí)上.
2.3.3 各載荷類(lèi)別時(shí)間統(tǒng)計(jì)
本文通過(guò)JAVA編輯代碼實(shí)現(xiàn)了對(duì)一天中不同載荷工作狀態(tài)的循環(huán)篩選, 進(jìn)而計(jì)算該載荷工作狀態(tài)下的起升電機(jī)作業(yè)次數(shù).從NetCMAS統(tǒng)計(jì)的實(shí)時(shí)數(shù)據(jù)可以得知, 數(shù)據(jù)間隔在15 s左右, 本文對(duì)2010年1月26日和2010年2月6日的起升電機(jī)徑向與軸向的振動(dòng)信號(hào)在不同的載荷工作狀態(tài)下進(jìn)行統(tǒng)計(jì)分析, 得出其不同載荷工作狀態(tài)在一天中的時(shí)間比例, 進(jìn)一步推算每種載荷工作狀態(tài)下的作業(yè)次數(shù), 最終的統(tǒng)計(jì)結(jié)果如表8所示.
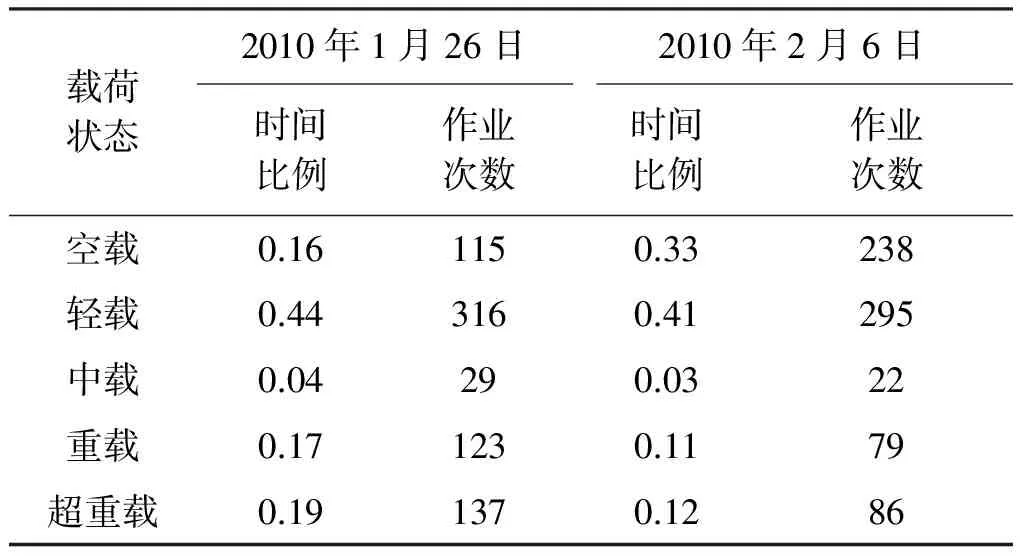
表8 2010年1月26日與2010年2月6日各載荷時(shí)間比例Table 8 Proportion of load time in Jan.26th and Feb.6th
由表8可知, 起升電機(jī)大部分時(shí)間處于輕載狀態(tài).對(duì)比兩天的數(shù)據(jù)可知, 岸橋處于不同的作業(yè)狀態(tài), 其起升的集裝箱的重量是不同的, 這為岸橋的壽命評(píng)估提供了可靠的依據(jù).由實(shí)際工程經(jīng)驗(yàn)可知, 大沖擊或者超載作業(yè)會(huì)引起岸橋的損傷.因此, 通過(guò)本文提出的岸橋載荷分類(lèi)方法, 將起升電機(jī)的振動(dòng)信號(hào)進(jìn)行分類(lèi), 計(jì)算其中的重載及超重載的次數(shù), 可以提高岸橋使用壽命評(píng)估的精確性.
3 結(jié) 論
(1) 本文通過(guò)分析起升電機(jī)運(yùn)行的實(shí)時(shí)數(shù)據(jù), 根據(jù)物理原理建立岸橋與電機(jī)載荷的數(shù)學(xué)模型(load∝P1∝I1∝B1∝vibration). 運(yùn)用K-均值聚類(lèi)算法, 選取電機(jī)徑向與軸向振動(dòng)信號(hào)作為特征參數(shù), 將岸橋載荷分為5類(lèi): 空載、輕載、中載、重載及超重載. 該方法選取特征參數(shù)少, 運(yùn)算簡(jiǎn)單, 精度高, 有較強(qiáng)的實(shí)用性.
(2) 結(jié)合工程應(yīng)用對(duì)分類(lèi)結(jié)果進(jìn)行驗(yàn)證, 結(jié)果表明該分類(lèi)結(jié)果較好.根據(jù)該分類(lèi)結(jié)果, 本文選取2010年1月26日和2010年2月6日計(jì)算岸橋該天每種載荷類(lèi)別的作業(yè)次數(shù)及其所占的比例, 便于分析岸橋一天中的工作狀態(tài), 該方法為工程中評(píng)估岸橋使用壽命提供準(zhǔn)確數(shù)據(jù).
(3) 運(yùn)用R語(yǔ)言作圖以及SPSS軟件進(jìn)行相關(guān)性分析得出,電機(jī)徑向與軸向振動(dòng)信號(hào)之間存在顯著正相關(guān)的關(guān)系, 關(guān)系式為:y=0.895x+0.151.此結(jié)論對(duì)工程應(yīng)用具有實(shí)際意義, 可以簡(jiǎn)化監(jiān)測(cè)工作, 釋放存儲(chǔ)內(nèi)存.
[1] FAN X. Evaluation method of remaining fatigue life for crane based on the acquisition of the equivalent load spectrum by the artificial neural network[J]. Journal of Mechanical Engineering, 2011, 47(20): 69-74.
[2] YIN Y, HU X, LIN T R. A practical approach to analyze the non-stationary signals of a quayside container crane motor using a combined empirical mode decomposition and wavelet packet quantization technique[J]. Noise Control Engineering Journal, 2016, 64(2): 126-133.
[3] XU X, HU X, JIANG S. Statistic analysis and predication of crane condition parameters based on SVM [C]// IEEE International Conference on Automation and Logistics. 2010: 109-113.
[4] 雷冬.疲勞壽命預(yù)測(cè)若干方法的研究[D].合肥:中國(guó)科學(xué)技術(shù)大學(xué)工程科學(xué)學(xué)院,2006.
[5] NAKAZONO K, OHNISHI K, KINJO H, et al. Vibration control of load for rotary crane system using neural network with GA-based training[J]. Artificial Life and Robotics, 2008, 13(1): 98-101.

[7] DING C, HE X. K-means clustering via principal component analysis [C]// International Conference on Machine Learning. 2004: 29.
[8] KANUNGO T, MOUNT D M, NETANYAHU N S, et al. An efficient k-means clustering algorithm: Analysis and implementation[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2002, 24(7): 881-892.
[9] STEPHAN K. Model assisted computing of three-phase asynchronous motor torque: DE, DE19756955[P]. 1999-07-01.
[10] YIN Y, HU X, LI Y. Heavy lifting motor vibration research and health evaluation standard to determine [J]. Journal of Vibration and Shock, 2013, 32 (12) : 67-71.
(責(zé)任編輯:楊靜)
LoadWeightIdentificationandClassificationoftheQuaysideCraneBasedonK-meansClusteringAlgorithm
ZHANGBingqian,HUXiong,TANGGang
(Logistics Research Center, Shanghai Maritime University, Shanghai 201306, China)
This work aims to measure the load weight of each operation of the quayside container crane which is important for accurately assessing the service life of the crane. K-means clustering algorithm and quantitative statistical analysis are used to study the vibration of the hoist motor of the crane in radial and axial directions. This paper proposes not only a mathematical model showing the relationship between the vibration intensity of the hoisting motor and the load weight of the crane but also the correlation model of vibration intensity in radial and axial direction. Moreover, the identification and classification methods of the load weight of the crane are put forward. This paper contributes to representing the real-time working status of the crane which is of great significance for the proper classification of the load state of the crane and the monitoring and evaluation in engineering applications.
quayside container crane; K-means cluster; vibration signal; load classification; correlation analysis
TP 206
A
1671-0444 (2017)04-0565-06
2016-12-29
國(guó)家高技術(shù)研究發(fā)展計(jì)劃(863)資助項(xiàng)目(2013A2041106);國(guó)家自然科學(xué)基金資助項(xiàng)目(31300783);中國(guó)博士后科學(xué)基金資助項(xiàng)目(2014M561458);教育部博士點(diǎn)基金聯(lián)合資助項(xiàng)目(20123121120004);上海海事大學(xué)科研基金資助項(xiàng)目(20130474);上海高校一流學(xué)科管理科學(xué)與工程資助項(xiàng)目;上海海事大學(xué)研究生創(chuàng)新基金資助項(xiàng)目(2017ycx024)
張冰倩(1992—),女,江蘇啟東人,碩士研究生,研究方向?yàn)槲锪餍畔⑾到y(tǒng). E-mail: bingqianzhang1116@126.com
胡 雄(聯(lián)系人),男,教授,E-mail: huxiong@shmtu.edu.cn
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
