船舶第二代完整穩性機理及船舶操縱技術分析
2017-11-03 02:54:05翁建軍
中國航海 2017年3期
翁建軍, 鄭 道, 張 兢
(1. 武漢理工大學 航運學院, 武漢 430063; 2. 內河航運技術湖北省重點實驗室, 武漢 430063)
2017-04-25
翁建軍(1965—),男,浙江諸暨人,教授,碩士,主要從事水上交通安全保障、海事管理理論與技術研究。
E-mail:wjj11233@163.com
1000-4653(2017)03-0088-05
船舶第二代完整穩性機理及船舶操縱技術分析
翁建軍1,2, 鄭 道1, 張 兢1,2
(1. 武漢理工大學 航運學院, 武漢 430063; 2. 內河航運技術湖北省重點實驗室, 武漢 430063)
為增進船舶航行安全,分析船舶第一代完整穩性規則的局限性及其發展趨勢,探討船舶第二代完整穩性的架構機理。從第一層穩性衡準的參數橫搖、純穩性喪失、癱船穩性、騎浪/橫甩和過度加速度等5種穩性失效模式的評估方法及其與船舶靜態參數、動態參數的關系入手,分析基于第二代完整穩性衡準的船舶操縱性能,提出確保穩性滿足規則要求的船舶操縱技術和措施。
第二代完整穩性; 穩性衡準; 船舶操縱; 安全
2008年,國際海事組織(International Maritime Organization, IMO)首次提出“新一代完整穩性衡準”的制定工作計劃[1],并在2011年正式將其命名為“第二代完整穩性衡準”。由此,世界各國開始對第二代完整穩性開展研究和討論。與第一代完整穩性相比,第二代完整穩性全面考慮船舶穩性失效問題,將船舶穩性失效模式[2]分為以下3種:
1) 船舶復原力臂變化導致的穩性失效模式,如純穩性喪失和參數橫搖。
2) SOLAS公約定義的將《2008年國際完整穩性規則》(即第一代完整穩性)作為第一層穩性衡準的癱船穩性。
3) 不僅與船舶穩性有關,而且與船舶操縱性能有關的穩性失效模式,如騎浪/橫甩。
此外,IMO還將我國與德國聯合提出的“過度加速度”作為船舶完整穩性失效的第5種模式,從而形成由5種穩性失效模式、3層評估方法及船舶航行作業指南組成的第二代完整穩性衡準體系。
目前第二代完整穩性衡準規范正處在構架與論證階段,按該規范設計建造的船舶的穩性和操縱性將與按第一代完整穩性規范建造的船舶產生較大差別。因此,分析第二代完整穩性衡準的架構機理,了解其第一層穩性衡準中參數橫搖、純穩性喪失、癱船穩性、騎浪/橫甩和過度加速度等5種穩性失效模式的評估方法及其與船舶靜態參數、動態參數的關系,確定第二代完整穩性衡準下的船舶操縱方法,對指導駕駛員有效操縱船舶,保障船舶的安全具有實際意義。
1 第一代完整穩性的局限性及發展趨勢
目前實施的第一代完整穩性規則主要是以船舶靜力學理論為基礎,考慮船舶在靜水中經受橫風、橫浪作用時的復原力臂曲線參數,根據船舶營運統計和氣象衡準制定的。當前,隨著各種超大型船舶及特殊構造和特殊用途的船舶不斷涌現,為提高運輸效率,對船舶抗風浪的要求不斷提高,但基于船舶靜力學理論制定的第一代完整穩性規則的衡準要求無法體現船舶種類、操縱特性和環境條件的多樣性,致使船舶在惡劣海況下因動穩性失衡而傾覆的事故頻發。因此,第一代完整穩性規則已不能有效滿足對船舶穩性的要求。目前,船舶水動力學理論研究已取得顯著成果,考慮船舶在風浪中的動穩性的第二代完整穩性規則的制定在技術上也日趨成熟。
2 第二代完整穩性的基本構架
第二代完整穩性是在第一代完整穩性規則的基礎上充分考慮波浪中船舶的動穩性提出的。對于5種穩性失效模式的第一層穩性衡準,除了個別參數沒有確定以外,其余都已基本達成一致意見。[1]每種穩性失效模式都有相對應的衡準條件,對船舶設計者、建造者及船舶駕駛員來說都具有較強的可操作性。但是,對于第二層穩性衡準和第三層穩性直接評估,目前尚處在討論階段,各國在模型試驗和實船驗證的基礎上提出多種衡準建議及提案。當前第二代完整穩性衡準的三層評估方法的計算完整度和評估準確度正逐漸提高,其基本原則是:對于一艘特定船舶,只有當第一層穩性衡準評估未通過時,才有必要進行第二層穩性衡準評估;若第二層穩性衡準評估仍未通過,則進行第三層穩性直接評估。當使用三層衡準的方法均無法通過時,對于擬建船舶,必須對其進行重新設計,使其符合衡準要求,并制定相應的航行操縱指南;對于已投入營運的船舶,制定航行操縱指南,以避免船舶在營運過程中出現穩性失效的問題。[1]
3 兩代完整穩性船舶操縱方法主要區別
與第一代完整穩性相比,第二代完整穩性考慮隨浪中的船舶穩性、橫甩和參數橫搖等因素對船舶安全的影響。從保障船舶安全航行的角度出發,考慮第二代完整穩性,需改進船舶操縱方法。
第一代完整穩性規則是基于橫風橫浪模型制定的,認為船舶所處的最危險情形是遭遇橫風橫浪。當遭遇橫風橫浪時,駕駛員通常采取改變航向的操縱方法,這種操縱方法可能使船舶隨浪或艉斜浪航行,而忽略該狀況下船舶穩性的不利變化。第二代完整穩性認為船舶隨浪航行同樣存在危險,可能造成穩性喪失。因此,駕駛員應盡量避免船舶在隨浪或艉斜浪狀況下航行。
第一代完整穩性主要考慮船舶在橫浪中的危險,駕駛員會盡量避免船舶出現主共振橫搖。第二代完整穩性考慮參數共振現象,船舶在順浪或頂浪航行時易產生較大幅度的縱搖和垂蕩,引起參數橫搖。因此,在操縱船舶時應在改變航向使其順浪或頂浪航行的基礎上,在條件允許的情況下改變航速,以改變船舶與波浪的遭遇周期,減小船舶的縱搖和垂蕩運動,避免出現大幅度的參數共振橫搖。
4 第一層穩性衡準評估及船舶操縱性分析
4.1參數橫搖
參數橫搖是指阻尼較小的船舶在航行過程中遭遇一定頻率的波浪時產生顯著的縱搖和升沉運動,船舶復原力臂隨時間周期性變化而產生較大的橫搖角的非線性現象。當船舶航行在波長與船長相當、遭遇周期為橫搖周期1/2的水域時,極易發生嚴重的參數橫搖,甚至導致傾覆。IMO第二代完整穩性衡準中有關參數橫搖的草案適用于船長≥24 m的所有商船。
4.1.1穩性衡準評估
當船舶滿足以下條件時,不易發生參數橫搖,認為參數橫搖第一層穩性衡準通過。

(1)
式(1)中:ΔhGM為船舶在波浪中的穩性高變化的幅值;hGM為船舶在靜水中的初穩性高度;RPR為第一層穩性衡準值。關于RPR,目前提出以下2種方案。
1) 方案1
RPR=0.5
(2)
2) 方案2
RPR=
(3)
(4)
式(4)中:D為型深;d為考慮載況的吃水;V為考慮載況的排水體積;VD為吃水達到型深D時的排水體積;AW為吃水為d時的水線面面積。

(5)
(6)
(7)
式(5)~式(7)中:IH為吃水為dH時的水線面慣性矩;IL為吃水為dL時的水線面慣性矩;dfull為滿載吃水;SW為波陡,取0.016 7,根據不同水域的波浪散射表得到。
當不滿足式(4)時,ΔhGM可按式(8)計算。
(8)
式(8)中:hGMmax和hGMmin分別為船舶在波長λ=L,波高h=LSW的規則波中,當波峰在船舶重心縱向位置及其前后每間隔0.1L共10個船波相對位置處時,初穩性高的最大值與最小值。[3]
4.1.2船舶操縱性及操縱方法
4.1.2.1 船舶操縱性
對于一艘特定船舶,經過參數橫搖的第一層穩性衡準評估可得知該船是否符合參數橫搖的設計要求,駕駛員應了解參數橫搖第一層穩性衡準評估機理,掌握船舶的操縱特性,不應簡單地認為通過參數橫搖第一層穩性衡準評估的船舶就一定不會發生參數橫搖,理由是式(1)是對參數橫搖第一層穩性衡準的最低要求,且僅考慮方形系數和菱形系數等船型參數,未單獨考慮船舶種類及船長、船寬、吃水等參數。不同種類及不同船型的船舶對參數橫搖的敏感程度是不同的,從事故統計分析上看:大部分集裝箱船和滾裝船受參數橫搖的影響較明顯,且衡準結果受船舶裝載狀況和波陡的影響較大;相對的,散貨船和油船不易發生參數橫搖。[2]
4.1.2.2 船舶操縱方法
① 通過貨物配積載來滿足參數橫搖衡準要求。由式(1)可知,增大船舶的初穩性高度hGM可減小ΔhGM與hGM的比值,更滿足衡準要求,從而有效避免參數橫搖的發生。因此,在進行貨物配積載時,駕駛員可通過調整貨物裝載位置及其質量來調整hGM值,并減小ΔhGM與hGM的比值,降低船舶發生參數橫搖的可能性。此外,為防止貨物受波浪影響而發生移位,船舶應加強貨物系固。
② 通過改變航向和/或航速來滿足波浪條件下的參數橫搖衡準要求。對于幾何形狀垂向變化較大的船舶,其在頂浪航行時往往伴隨著明顯的垂蕩和縱搖運動,使船舶吃水在一定范圍內不斷變化,最終導致船舶穩性變差。因此,在波浪中操縱船舶時,通常應采取改變航向和/或航速的方法來調整船舶與波浪的遭遇角度及遭遇周期。當遇到橫浪時,可通過改變航向和/或航速來調整波浪遭遇周期,從而減輕橫搖;當遇到縱浪時,改變航向能在一定程度上減小縱搖,但會加大橫搖和垂蕩,因此應改變航速以調整波浪遭遇周期,使船舶避開次級諧搖區。
4.2純穩性喪失
純穩性喪失是指船舶隨浪航行過程中,當波速與航速相近、波峰運動到舯部時,穩性大幅下降,導致船舶出現傾斜、甚至傾覆的現象。
4.2.1穩性衡準評估
當船舶滿足以下條件時,認為其不易發生純穩性喪失。
hGMmin>RPLA
(9)
式(9)中:RPLA=0.05 m;hGMmin為波浪中船舶最小穩性高。
若滿足式(4),則hGMmin可根據式(10)進行計算。
(10)
式(10)中:KB為浮心高度;IL為水線面慣性矩;V為排水體積;KG為重心高度。
若不滿足式(4),則進一步采用第二層穩性衡準方法計算hGMmin并進行衡準核算。
4.2.2船舶操縱性及操縱方法
4.2.2.1 船舶操縱性
由于現行的第一代穩性衡準規則未涉及縱浪狀態下的船舶穩性衡準問題,因此駕駛員易忽視艉部來浪對船舶穩性的影響,對船舶隨浪航行的危險性認識不足,通常只認為橫風、橫浪是影響船舶穩性的最危險因素,從而未對船舶服務航速加以控制,導致純穩性喪失而發生傾覆事故。
隨浪航行對船舶穩性的影響有可能大于橫風橫浪航行,尤其是當波長近似等于船長、波速近似等于船速,且波峰位于舯部時,船體浸水面積下降明顯,導致船舶穩性大幅度降低。
4.2.2.2 船舶操縱方法
在隨浪中,船舶初穩性高度的降幅可達0.3~1.0 m。一般情況下,一艘滿載雜貨船的初穩性高度為0.3~0.5 m,一艘滿載超級油船的初穩性高度為0.3~1.0 m。[4]在隨浪航行狀態下,船舶最小穩性高度可能為負值,從而不能滿足第一層穩性衡準的要求。在操縱船舶時,應避免隨浪航行,尤其是當艉部來浪較大時。當船舶在隨浪狀態下航行時,可通過改變航向和/或航速來改變船舶與波浪的遭遇角度及相對速度,從而緩解初穩性高度的降低。
由式(10)可知,同時采取調整貨物重心高度和調整壓載水等措施確保最小穩性高度>0.05 m,可更有效地避免因純穩性喪失而發生船舶傾覆事故。
在隨浪中,按第一代穩性規則設計的船舶可能使1個或多個穩性指標小于要求值,應引起注意。
4.3癱船穩性
癱船穩性是船舶在風浪中航行時由于主機故障導致動力喪失,在自由漂浮狀態下發生共振橫搖(甚至傾覆)的穩性失效模式。在這種情形下,當船舶漂移至橫浪狀態時是最危險的。
4.3.1穩性衡準評估
第二代完整穩性第一層穩性衡準基本上采取《2008年國際完整穩性規則》中的氣象衡準條件,只是對波浪條件作出適當的修改,擴展波陡表。
癱船穩性第一層穩性衡準的標準為
式(11)和式(12)中:φ0為船舶在定常風作用下的橫傾角;φjb為甲板邊緣進水角;b和a分別為非定常風作用力臂與復原力臂GZ曲線所圍不同部分的面積(見圖1)。
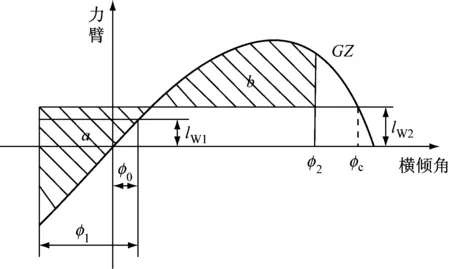
圖1 GZ曲線下面積b和面積a示意
4.3.2船舶操縱性及操縱方法
4.3.2.1 船舶操縱性
《2008年國際完整穩性規則》中的氣象衡準是指船舶在橫風、橫浪中失去動力的情況下向下風舷橫傾一定的角度,在該橫傾角下受波浪的影響發生諧搖的衡準。在進行衡準計算時,只考慮風壓的影響,忽略橫傾狀態下波浪對船舶諧搖的作用。第二代穩性衡準在考慮橫風影響的基礎上同時考慮橫傾中的船舶受波浪諧搖的影響,穩性衡準標準更高。
4.3.2.2 船舶操縱方法
船舶在橫風、橫浪中航行時,駕駛員易對氣象衡準產生錯誤的理解,將船舶氣象衡準簡單地理解為船舶的抗風等級,而忽略橫風、橫浪條件下波浪致使船舶產生諧搖的情況。因此,船舶在橫風、橫浪中航行時,不應過高地估計抗風浪等級,在重點考慮船舶的抗風等級和抗風能力的同時,考慮船舶橫傾時風浪致使船舶發生諧搖帶來的影響。
當船舶出現過度橫搖、癱船穩性衡準要求可能難以滿足的問題時,動力喪失,無法采取改變航速、航向等措施,在某種程度上失去了抵抗風浪的能力,駕駛員應積極進行自救,避免因癱船穩性喪失而發生傾覆事故。可采取的自救措施主要包括:
① 通過采取加壓載水(裝載條件允許時)、拋甲板貨等措施降低船舶重心,減小受風面積;
② 若船舶所處水域的水深適于錨泊,則可拋錨,利用錨泊力控制船舶的航向,減小風壓角;
③ 當大風浪持續、船舶橫搖幅度過大且可能進一步增大時,駕駛員立即發出求救信號,并做好棄船準備。
4.4騎浪/橫甩
騎浪是船舶發生橫甩的征兆,是指船舶在風浪中以不同于波速的航速隨浪航行時,受波浪的影響,逐漸被其捕獲,受到的阻力、縱向波浪力和推力在航速等于波速時達到動力平衡的狀態;橫甩是指船舶在隨浪中高速航行時因突然失去航向保持能力而突然轉向,并伴有劇烈的艏搖,即使操反向最大舵角也不足以改變航向的現象。
4.4.1穩性衡準評估
當船舶滿足式(13)時,認為該船不易發生騎浪/橫甩。[5]
Fr﹤0.3 orLBP﹥200 m
(13)
式(13)中:Fr為船舶傅汝德數;LBP為船舶垂線間長。Fr的計算式為

(14)
式(14)中:Vs為船舶服務航速;g為重力加速度;L為船舶垂線間長。
4.4.2船舶操縱性及操縱方法
4.4.2.1 船舶操縱性
根據騎浪/橫甩穩性衡準原理,船長>200 m的船舶發生騎浪/橫甩的可能性較小,但在一定航速或一定波長條件下仍有發生的可能性;船長<200 m的船舶則相對易發生騎浪/橫甩現象。縱觀船舶騎浪/橫甩事故可發現,大部分此類事故都發生在船長較小且航速較高的船舶上,其中航速過高是主要原因。
4.4.2.2 船舶操縱方法
根據騎浪/橫甩第一層穩性衡準基本原理,駕駛員在隨浪中航行時,應注意船長、航速和波長等3個要素,考慮到船舶垂線間長LBP是固定值,當判斷可能產生橫甩現象時,可通過降低航速來減小Fr,保證Fr<0.3,避免船舶發生橫甩事故。此外,騎浪發生在隨浪航行狀態下,駕駛員在操船時可通過改變航向來避免船舶隨浪航行,改變隨浪航行狀態,以進一步避免船舶發生橫甩事故。船長>200 m的船舶不應過分自信不會發生騎浪/橫甩事故,而應根據波浪實際情況采取相應的措施。
船舶在海上航行時,波浪要素可從相關氣象資料和航路指南中查閱得到。大洋中的波浪最易出現的波長通常為80~140 m,波浪周期通常為7~10 s,波浪傾斜角一般為1/40~1/30。大洋中航行的船舶應根據其波浪特點,結合船舶長度,適當調整航向和/或航速,以避免騎浪/橫甩事故發生。
4.5過度加速度
過度加速度是指由于船舶初始GM值過大,當船舶在波浪中航行時,因橫搖而產生過大的橫向加速度的情況。船舶產生過度加速度時易導致貨物移動或人員遭到傷害,甚至發生傾覆事故。
4.5.1穩性衡準評估
若滿足式(15),則認為船舶容易產生過度加速度。
(15)
式(15)中:φ為橫搖幅值,rad,可利用式(16)計算;kL為垂向加速度和艏搖運動的影響系數;g為重力加速度;H為橫搖軸到駕駛甲板的高度(假設橫搖軸位于水線與中心之間的平均高度處),m;Tr為船舶橫搖固有周期,s;R1為衡準值,目前取值為8.9 m/s2。
(16)
式(16)中:r為等效波傾系數;s為波陡系數;δφ為自由橫搖曲線衰減系數。[6]
4.5.2船舶操縱性及操縱方法
4.5.2.1 船舶操縱性
根據過度加速度穩性衡準的基本原理,當船舶初始hGM值過大時,在波浪中處于橫搖狀態航行時易產生過大的橫向加速度,此時船舶固有搖擺周期Tr較小,船舶左右橫搖的頻率較高,其后果是易產生貨物移動和帶來人員傷害。
4.5.2.2 船舶操縱方法
目前對過度加速度的研究較少,船舶駕駛員可能對橫向加速度的理解不夠,實際航行時也較難判斷船舶是否處于過度加速度狀態。根據研究,航速較低的船舶易產生過度加速度,且在橫浪狀態下更易產生。為防止產生過度加速度,在進行貨物配積載時,應合理調配貨物的位置和質量,最終保證船舶具有合適的初始hGM值,通過控制hGM值,從根源上防止過度加速度的產生。
船舶在橫浪中航行時,一旦發現可能產生過度加速度,在條件允許的情況下,可通過適當調配壓載水來使hGM值適度變小,從而降低產生過度加速度的可能性。此外,還可采用適度增大航速的方法來減小船舶橫搖加速度。在大風浪來臨之前,應加強檢查和加固貨物綁扎。為防止過度加速度使貨物發生移位和人員受到傷害,應加強貨物系固,并通知有關人員注意防止受到傷害。
從衡準原理上看,參數橫搖和過度加速度是因hGM值過小及過大而相互矛盾的2個穩性失效模式。因此,駕駛員在進行貨物配積載、加載壓載水作業時,應充分考慮船舶所在航區的風浪情況及可能遭遇的波浪周期,及時調整船舶的hGM值,使其處于適當狀態,以防止參數橫搖和過度加速度的產生。
5 結束語
船舶第二代完整穩性衡準將更多地考慮船舶在風浪中的動穩性,分析和理解船舶動穩性衡準機理對分析船舶操縱性和指導駕駛員操縱船舶具有重要意義。在理解動穩性衡準機理時,應注意5種穩性失效模式是相互關聯的,駕駛員在操縱船舶時應充分考慮各種穩性失效模式的發生條件,運用良好船藝,保持良好的動穩性狀態,降低船舶在風浪中航行時的傾覆風險,保障船舶的航行安全。
[1] 顧民,魯江,王志榮.IMO第二代完整穩性衡準評估技術進展綜述[J].中國造船,2014(4):185-193.
[2] 付麗麗,鄭雙燕,柳衛東,等.第二代完整穩性參數橫搖薄弱性衡準發展綜述[J].中國造船,2015(S1):217-223.
[3] 徐光龍.船舶參數橫搖薄弱性衡準研究[D].大連:大連理工大學,2014.
[4] 沈玉如.船舶貨運[M].大連:大連海事大學出版社,2007:44-55.
[5] IMO. Report of the Working Group (Part 1) [R]SLF 55/WP3.2013.
[6] IMO. Development of Second Generation Intact Stability Criteria [R]SDC 1/INF.8.2014.
MechanismofSecondGenerationIntactStabilityandTechnicalofShipManeuvering
WENGJianjun1,2,ZHENGDao1,ZHANGJing1,2
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China)
The limitations and development trend of the first generation intact stability rules are analyzed. The mechanism of the second generation intact stability of ships is discussed. The discussion covers evaluation methods for the five stability failure modes (parametric rolling, pure loss of stability, dead ship stability, surf-riding/broaching, excessive acceleration) and the connection between them and the static/dynamic parameters used in last generation. The ship maneuverability based on the second generation intact stability is analyzed and the technology and measures of maneuvering without violating the new stability rules are proposed.
second generation intact stability; vulnerability criteria; ship maneuvering; safety
U661.3;U675.9
A
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
汽車實用技術(2022年4期)2022-03-07 06:07:20
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
汽車電器(2018年1期)2018-06-05 01:22:54
中國船檢(2017年3期)2017-05-18 11:33:09
公民與法治(2016年4期)2016-05-17 04:09:26