一種衛星通用遙控指令譯碼器設計
2017-11-06 12:39:43陶濤汪路元于敏芳楊小瑞程博文劉偉偉竇鈉幺飛
航天器工程 2017年4期
關鍵詞:指令
陶濤 汪路元 于敏芳 楊小瑞 程博文 劉偉偉 竇鈉 幺飛
(北京空間飛行器總體設計部,北京 100094)
一種衛星通用遙控指令譯碼器設計
陶濤 汪路元 于敏芳 楊小瑞 程博文 劉偉偉 竇鈉 幺飛
(北京空間飛行器總體設計部,北京 100094)
針對衛星傳統遙控指令譯碼器已經無法滿足通用性、適應性、好用易用及批量生產的要求,提出了一種新型遙控指令譯碼器設計。與傳統遙控指令譯碼器相比,新型遙控指令譯碼器能夠同時適應脈沖編碼調制(PCM)遙控體制和空間數據系統咨詢委員會(CCSDS)分包遙控體制的兩種標準;并且配置了兩種輸入接口,既能直接接收地面發送的直接指令幀進行譯碼輸出,又能接收星載計算機發出的間接指令幀進行譯碼輸出。新型遙控指令譯碼器配置的與星載計算機的接口以及具備的自主健康管理功能,非常適用于有智能化自主運行管理需求的衛星。該譯碼器通用性和適應性強,非常適用于高集成度的抗輻照專用集成電路(ASIC)器件研制,以及高可靠性和長壽命產品的批量生產。新型遙控指令譯碼器設計已在新遙感平臺及相應的衛星研制中得到驗證。與傳統遙控指令譯碼器相比,新型遙控指令譯碼器的功能、性能均得到顯著提高。
衛星遙控指令譯碼器;通用設計;雙遙控體制;輸入接口;自主健康管理
1 引言
航天產業的發展,對航天產品在長壽命、高可靠要求的基礎上進一步提出了通用性、適應性、好用易用及批量生產的新要求。近年來,互聯網及數字化技術的發展,為衛星自主運行管理的智能化設計和應用奠定了良好的技術基礎,并發揮了重要的促進作用[1-2]。衛星的自主運行管理主要是星載計算機系統根據星上測量信息及設計規定的算法規則進行自主決策[3-4],對衛星設備或部件進行操作控制,維護自身健康管理或執行相關的任務功能。綜合電子技術的發展,為自主運行狀態下對衛星任務處理及自主健康管理提供了可能性。
衛星指令包括直接指令、間接指令和數據指令,一般意義下的直接指令和間接指令的譯碼輸出均為單個脈沖信號,而數據指令一般是需要星載計算機軟件處理和解析的功能指令。直接指令是由星載遙控設備不經過任何軟件處理而直接從上行遙控通道接收、識別和譯碼輸出的高優先權指令;間接指令是星載計算機發出并由間接指令譯碼器識別、譯碼和輸出的指令。傳統的星載譯碼器分為直接指令譯碼器與間接指令譯碼器,兩種譯碼器互不兼容、不能通用,因其輸入接口不同,指令碼格式也不同,導致不同衛星的遙控指令譯碼器的狀態各異,不利于技術狀態的統一。因此,有必要設計新型的譯碼器,既能直接接收地面發送的直接指令幀進行譯碼輸出,又能接收星載計算機發出的間接指令幀進行譯碼輸出。另外,現在運行的大多數衛星采用脈沖編碼調制(PCM)遙控體制,而隨著星載設備智能化程度的提高,越來越多的衛星開始使用空間數據系統咨詢委員會(CCSDS)協議的分包遙控體制。為了實現指令譯碼器通用性、適應性及批量生產的要求,遙控指令譯碼器應滿足雙遙控體制的需求。
針對新形式下的新要求,本文闡述了一種新型遙控指令譯碼器的實現方案,它能同時適應PCM遙控體制和CCSDS協議的分包遙控體制的兩種標準;配置了兩種輸入接口,既能適應直接指令幀的譯碼輸出,又能適應間接指令幀的譯碼輸出。其中,所配置的與星載計算機的接口,以及具有的自主健康管理功能,非常適宜于有智能化自主運行管理需求的衛星使用,以利于衛星的好用易用設計。該譯碼器的通用性和適應性強,已經實現了高集成度抗輻照專用集成電路(ASIC)器件的研制,并在遙感公用平臺及幾顆不同衛星的應用中得到驗證。
2 衛星自主運行模式對遙控指令譯碼器的新需求
(1)對雙遙控體制的適應性[5]。目前,多數在軌以及部分在研衛星采用PCM遙控體制,而越來越多的新研衛星開始采用CCSDS分包遙控體制。體制不同,指令的格式及其處理方式不同。為了能夠適應當前在研衛星,通用的譯碼器應能同時適應上述雙遙控體制標準。
(2)實現雙指令源接收指令。衛星自主運行模式下,譯碼器需要設計兩個指令源接收通道,保證既能接收地面上注的指令,又能接收星載計算機發送的指令。
(3)開關指令按時序規則執行。衛星自主運行模式下,對于地面上注開關指令和星載計算機自主發送的開關指令,到達譯碼器的時間是隨機的,或先后或同步到達。這就要求這兩個通道的指令能夠按照次序及優先權規則順序執行,不能出現漏指令。
(4)生成指令執行的狀態報告。在衛星自主運行模式下,遙控指令譯碼器在執行指令后,要反映將指令執行的過程、結果以及譯碼器自身的健康狀態的遙測數據通過狀態檢測接口主動發送給星載計算機。
3 遙控指令譯碼器的設計
如前文所述,衛星自主運行模式對遙控指令譯碼器的需求包括:適應雙遙控體制、雙指令源指令應能按序執行、應提供表征自身健康狀態的狀態報告等。針對這些需求,遙控指令譯碼器的設計應滿足以下幾點。
(1)設計兩個獨立的指令通道,分別接收地面上注和CPU發送的指令。兩個通道均不能出現漏指令的情況。
(2)設計時應支持PCM遙控體制和CCSDS分包遙控體制。
(3)采用模塊化設計,由一個或數個模塊組成;在工作過程中應能生成遙控指令譯碼器自身狀態報告。
(4)考慮到遙控指令譯碼器在衛星綜合電子分系統中應用的通用性,應保證其既能適用于系統管理單元使用,又能適用于數據接口單元(DIU)使用。
為了實現以上功能,本文設計的遙控指令譯碼器內部電路共包括接口及通道選擇電路、指令接收及處理電路、芯片狀態報告產生電路以及合路電路。下面從遙控指令譯碼器的工作環境和接口關系、譯碼器在系統管理單元和數據接口單元中的應用、雙遙控體制的處理、雙指令源的時序處理以及狀態報告的設計來闡述遙控指令譯碼器的設計。
3.1遙控指令譯碼器工作環境和接口關系
遙控指令譯碼器的工作環境如圖1所示。地面上注指令經過應答機后進入系統管理單元(SMU)。系統管理單元的信道關口模塊對應答機的信號進行通道識別、信道解碼和選擇,經過選擇的信號送至指令模塊后進入譯碼器。進入譯碼器的直接指令由譯碼器直接執行;進入譯碼器的注入數據幀由譯碼器轉發。譯碼器將需要轉發的注入數據幀與自身產生的狀態報告進行合路后順序處理,經過CPU接口容錯模塊后送至CPU模塊。對于間接指令,由CPU發出,經CPU接口容錯模塊后送至指令模塊的譯碼器。

圖1 遙控指令譯碼器工作環境Fig.1 Working environment of telecommand decoder
3.2遙控指令譯碼器在系統管理單元中的應用
系統管理單元中遙控指令譯碼器的電原理框圖如圖2所示。

圖2 系統管理單元譯碼器電原理框圖Fig.2 Electric diagram of SMU telecommand decoder
遙控指令譯碼器的輸入有兩個源:一個是地面上注的遙控傳送幀,一個是CPU發送的幀。地面上注指令格式采用PCM遙控體制或CCSDS分包遙控體制,CPU發送的指令格式采用PCM遙控體制。地面上注數據由應答機接收后輸出至系統管理單元;系統管理單元的信道關口模塊對數據進行同步和信道解碼處理,然后以明文標準遙控幀的格式輸出至遙控指令譯碼器,其中明文遙控幀可以包括直接指令和注入數據兩種遙控幀。對于地面上注的直接指令幀,遙控指令譯碼器接收后直接執行,其中直接指令譯碼部分繼承了傳統遙控高可靠設計方案。對于地面上注的注入數據幀,遙控指令譯碼器將其與自身產生的狀態報告合路后發送給CPU。對于CPU發送的間接指令,遙控指令譯碼器直接進行譯碼輸出,譯碼正確后輸出指令脈沖給指令用戶。
3.3遙控指令譯碼器在數據接口單元中的應用
數據接口單元中遙控指令譯碼器的電原理框圖如圖3所示。
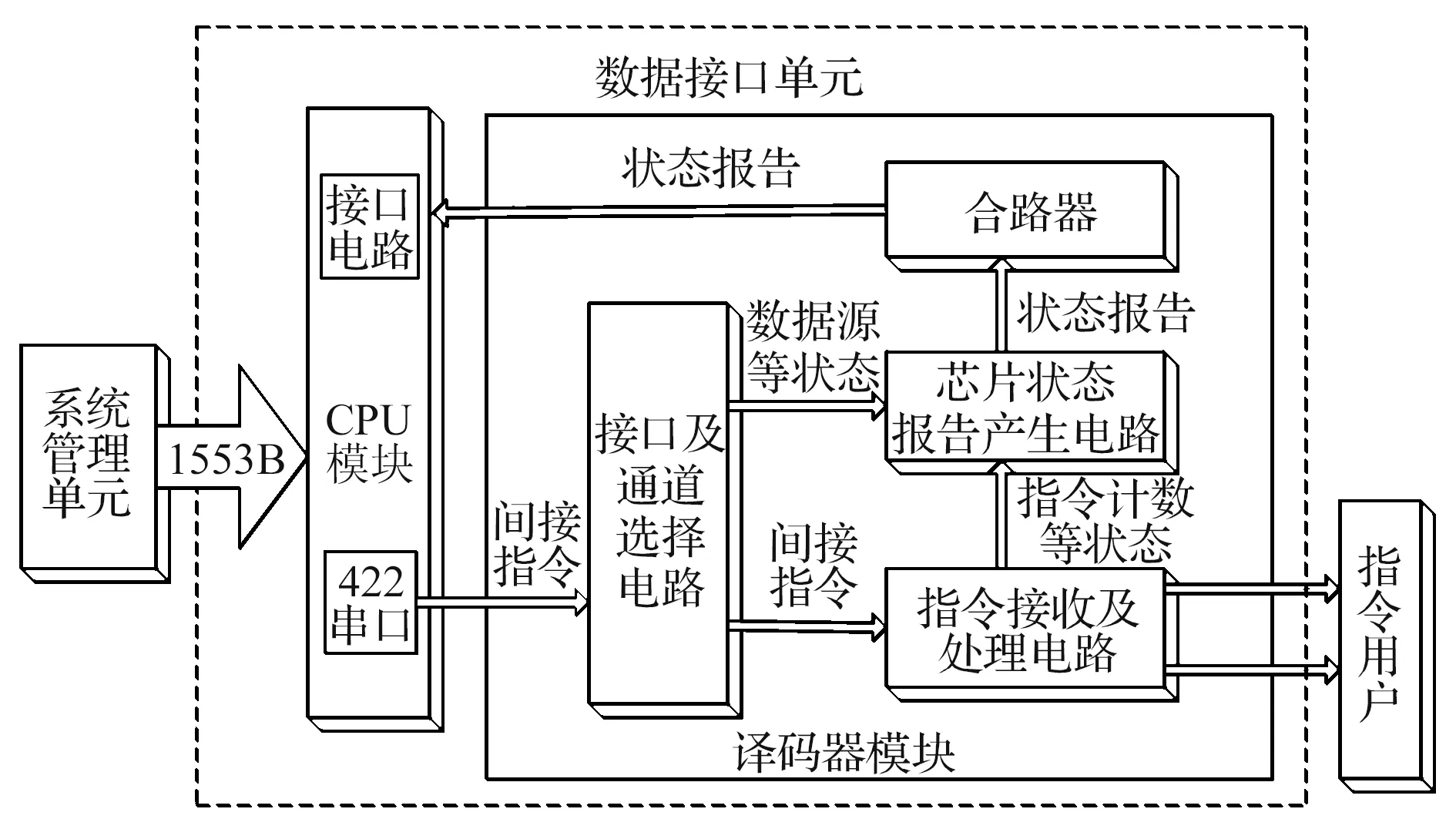
圖3 數據接口單元譯碼器電原理框圖Fig.3 Electric diagram of DIU telecommand decoder
間接指令在系統管理單元與數據接口單元之間,以及數據接口單元內部的CPU與遙控指令譯碼器之間傳送,傳送格式均采用PCM遙控體制。間接指令首先由系統管理單元通過1553B總線發送到數據接口單元的CPU模塊,再由CPU模塊發送到遙控指令譯碼器。間接指令的處理方式與在系統管理單元中的處理方式相同。
3.4雙遙控體制開關指令碼的處理
目前在軌及在研衛星使用遙控體制主要有PCM遙控體制[6]和CCSDS分包遙控體制[7-8]兩種。無論哪種體制,本文設計的遙控指令譯碼器為保持兩種體制的兼容性,對于類型為開關指令的傳送幀,其數據域中的指令碼長度統一規定為PCM遙控格式中的標準長度,即72 bit。
1)PCM遙控體制
PCM遙控體制的傳送幀格式見圖4。PCM遙控體制分為地址同步字(16 bit)、方式字(8 bit)和數據域。其中:方式字用于區分遙控幀的類型,數據域的長度與方式字相關聯,當方式字標識為直接指令時,數據域長度為72 bit。以系統管理單元為例,處理順序為:①地面上注的數據經過應答機接收后進入系統管理單元。②系統管理單元內的信道關口模塊完成數據解擾,以及密文數據的解密,然后將明文數據傳送至譯碼器。③遙控指令譯碼器對接收的遙控幀進行識別,對識別為PCM遙控體制的傳送幀,則搜索指令幀的地址同步字(16 bit)和方式字(8 bit),并通過方式字來區分指令幀類型。如果幀類型為直接指令,則提取72 bit指令碼送至指令譯碼電路,并根據指令碼的編碼規則進行譯碼,譯碼正確后輸出對應通道的指令脈沖給指令用戶;如果是幀類型為注入數據,則將數據幀發送至CPU模塊,由CPU處理。

圖4 PCM遙控體制傳送幀格式Fig.4 Format of PCM telecommand system
2)CCSDS 分包遙控體制
CCSDS分包遙控體制的傳送幀格式見圖5。開關指令封裝在相應遙控傳送幀的數據域內。以系統管理單元為例,遙控傳送幀處理順序為:①地面上注的數據經過應答機接收后進入系統管理單元。②系統管理單元的信道關口模塊完成信道解碼、解擾以及密文數據的解密,然后送至遙控指令譯碼器。③遙控指令譯碼器對遙控傳送幀的主導頭進行解析,通過虛擬信道標識來區分遙控傳送幀類型。如果幀類型是直接指令幀,則從相應遙控傳送幀的數據域中提取72 bit的指令碼送譯碼電路進行譯碼,譯碼正確后輸出對應通道的指令脈沖給指令用戶[9-10];如果幀類型是注入數據幀,則將相應數據發送至CPU模塊,由CPU處理。

圖5 CCSDS分包遙控體制傳送幀格式Fig.5 Format of CCSDS packet telecommand system
3.5雙指令源的時序處理
考慮到衛星在自主運行模式下的開關指令來源有兩個,且兩個源是獨立的,所以遙控指令譯碼器應設計兩個指令入口。為了保證兩個通道指令到達時能夠執行,不出現漏指令的情況,考慮到最苛刻的情況(兩個通道的指令同時到達),遙控指令譯碼器要分別對兩個通道的指令進行接收和處理。如果遙控指令譯碼器只有一個通道的指令接收完畢,則將這個通道的指令發送到指令譯碼電路進行處理;如果兩個通道的指令均接收完畢,就要根據優先級的設定進行仲裁判決。本文設計中,設定地面上注指令優先處理,待地面上注指令處理完畢后,再處理CPU的指令。處理電路工作流程見圖6。遙控指令譯碼器的兩個指令接收電路處理方式相似,以地面上注的指令通道為例,指令接收電路搜索指令的同步頭,緩存中收到完整指令后,判決電路判決結果為可以輸出時,將指令轉移至發送區,待譯碼電路空閑時,將指令發送到譯碼電路。
經過仲裁判決之后,將通道優先級高的指令送到指令譯碼電路。指令譯碼電路接收指令包括指令碼和脈沖寬度設置指令碼。對于指令碼,譯碼電路根據規定的編碼規則進行指令合法性驗證。如果驗證結果正確,則將結果送至指令脈沖輸出電路;如果編碼規則不正確,則結束此條指令的處理工作,回到空閑(IDLE)狀態。對于脈沖寬度設置指令碼,譯碼電路從中提取出脈沖寬度的信息,并將此信息送至指令脈沖輸出電路。指令脈沖輸出電路根據長度信息,在指令碼譯碼結果正確的情況下輸出設定長度的指令脈沖,輸出完成后,回到IDLE狀態。處理電路工作流程見圖7。

圖6 接收緩存處理流程Fig.6 Flow of receiving buffer
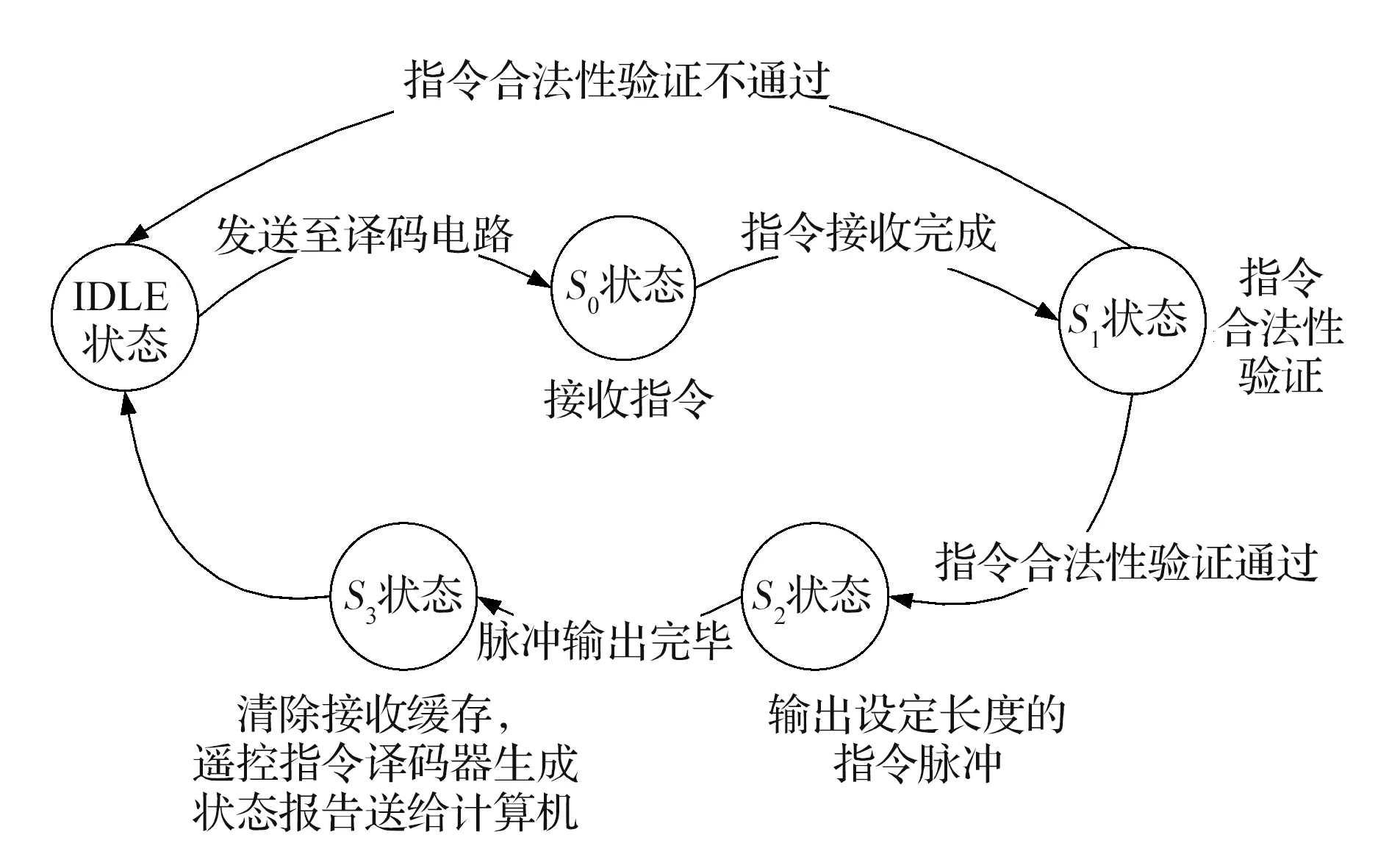
圖7 指令處理流程Fig.7 Flow of command processing
3.6遙控指令譯碼器狀態報告設計
在衛星自主運行模式下,當指令發送完成后,CPU要通過遙控指令譯碼器芯片的狀態來判斷指令的執行情況。如果發送成功,則可以進行下一步工作;如果指令發送失敗,則考慮重新發送該條指令。因此,遙控指令譯碼器自身的狀態報告要及時回傳給CPU,供CPU及時判斷。本文設計中,當指令譯碼結束后,遙控指令譯碼器主動產生本次指令處理的狀態報告,內容包括指令源、譯碼結果及指令計數等。狀態報告格式按照圖5中遙控傳送幀的格式,芯片的狀態報告放在遙控傳輸幀的數據域中。狀態報告幀與地面上注的注入數據幀經過合路后,通過遙控指令譯碼器與CPU的接口送至CPU,由CPU進行解幀處理。
4 遙控指令譯碼器的實現及驗證
目前,遙控指令譯碼器已經完成原型設計以及ASIC流片,以及ASIC的各項可靠性驗證試驗[11]。該款ASIC產品在單板、單機測試、鑒定試驗、驗收試驗以及整星測試的過程中,工作穩定,功能、性能滿足使用要求。基于該款ASIC的遙控指令譯碼器模塊以及系統管理單元單機,已在多顆衛星的綜合電子分系統單機中得到應用。如表1所示,與傳統單遙控體制譯碼器相比,本文設計的遙控指令譯碼器可以適應兩種不同的遙控體制,同時處理直接指令和間接指令,傳送速率顯著提高,能夠更好地適應不同衛星的需求。

表1 兩種遙控指令譯碼器設計對比
5 結束語
本文針對衛星自主運行時應用的需求和特點,完成了一種通用遙控指令譯碼器的方案設計,能夠同時適用于直接指令和間接指令的處理,有效解決了衛星自主運行時雙指令源指令同時發送,以及遙控指令譯碼器自主健康診斷等問題,具有通用性強、應用廣泛的優點,可滿足目前在研衛星對遙控指令譯碼器的需求,為未來高可靠、高通用遙控指令譯碼器的設計提供參考。
References)
[1] 潘宇倩,張弓,白東煒.衛星健康管理故障診斷算法的設計及其實現[J].航天器工程,2011,20(5):37-42
Pan Yuqian, Zhang Gong, Bai Dongwei. Design and implementation of fault diagnosis algorithm for satellite health management [J]. Spacecraft Engineering, 2011, 20(5): 37-42 (in Chinese)
[2] 陳荔瑩,徐東宇,趙振巖.國外衛星星座自主運行技術發展綜述[J].航天控制,2008,26(2):92-96
Chen Liying, Xu Dongyu, Zhao Zhenyan. Review on the development of autonomous operation technology for satellite constellations [J]. Aerospace Control, 2008, 26(2): 92-96 (in Chinese)
[3] Gordon B.A review of system health state determination methods, AIAA 2005-2528 [R]. Washington D.C.: AIAA, 2005
[4] Baroth E.IVHM techniques for future space vehicles, AIAA 2001-3523E [R]. Washington D.C.:AIAA,2001
[5] 譚維熾,顧瑩琦.空間數據系統[M].北京:中國科學技術出版社,2008
Tan Weichi, Gu Yingqi. Space data system [M]. Beijing: China Science and Technology Press,2008 (in Chinese)
[6] 國防科學技術工業委員會. GJB 1198.1A 2004衛星測控和數據系統——PCM遙控[S].北京:國防科學技術工業委員會,2004
Commission of Science,Technology and Industry for National Defence. GJB 1198.1A 2004 satellite telemetry and telecommand and data system-PCM telecommanding [S]. Beijing: Commission of Science,Technology and Industry for National Defence, 2004 (in Chinese)
[7] 國防科學技術工業委員會.GJB 1198.7A 2004衛星測控和數據系統——分包遙控[S].北京:國防科學技術工
業委員會,2004
Commission of Science,Technology and Industry for National Defence.GJB 1198.7A 2004 satellite telemetry and telecommand and data system-packet telecommanding [S]. Beijing: Commission of Science,Techno-logy and Industry for National Defence, 2004 (in Chinese)
[8] 趙和平,李寧寧.CCSDS標準在軍用航天任務中的應用[J].航天器工程,2007,16(4):78-82
Zhao Heping, Li Ningning.Implementation of CCSDS standard in military space mission [J]. Spacecraft Engineering, 2007,16(4): 78-82 (in Chinese)
[9] 張亞航,趙思陽,何雄文.基于傳統遙控體制的分包遙控方案設計[J].飛行器測控學報,2012,31(z1):81-85
Zhang Yahang, Zhao Siyang, He Xiongwen. A multilayer telecommand design based on the traditional telecommand system [J].Journal of Spacecraft TT&C Technology, 2012, 31(z1): 81-85 (in Chinese)
[10] 熊蔚明,謝春堅,梁顯鋒.螢火一號火星探測器測控通信關鍵技術[J].上海航天,2013,30(1):116-120
Xiong Weiming, Xie Chunjian, Liang Xianfeng. Key technology of TT&C for YH-1 Mars probe [J]. Aerospace Shanghai, 2013, 30(1): 116-120 (in Chinese)
[11] 常克武,王海濤,張弓.一種基于FPGA的抗輻射加固星載ASIC設計方法[J].航天器工程,2016,25(4):74-80
Chang Kewu, Wang Haitao, Zhang Gong. A design method for radiation hardened space-borne ASIC based on FPGA [J]. Spacecraft Engineering, 2016,25(4): 74-80 (in Chinese)
Design of Universal Telecommand Decoder for Satellite
TAO Tao WANG Luyuan YU Minfang YANG Xiaorui CHENG Bowen LIU Weiwei DOU Na YAO Fei
(Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
The traditional satellite telecommand decoder has been unable to meet the requirements of versatility, adaptability, easy use and mass production. In this paper, a new telecommand decoder design is proposed. Compared with the traditional telecommand decoder, the new telecommand decoder can adapt to PCM telecommand system and CCSDS layered telecommand system; it provides two input interfaces to receive the direct command frame sent by the ground directly to decode and output, and also recevive the indirect command frame sent by the on-board computer to decode and output. The configuration of the interface with the computer and the function of self health diagnosis are very suitable for the use of satellites with intelligent operation and management requirements. The decoder is so versatile and adaptable that it is very suitable for the development of highly integrated antiradiation ASIC devices and mass production of reliability and long life products. The design is verified by the satellite of new remote sensing paltform and corresponding model satellites. Compared with the traditional telecommand decoder, the function and perfor-mance of the new telecommand decoder have been greatly improved.
satellite telecommand decoder; universal design; two telecommand systems; input interface; self health diagnosis
TN492
A
10.3969/j.issn.1673-8748.2017.04.014
2017-06-05;
2017-07-24
國家重大航天工程
陶濤,男,碩士,研究方向為星載綜合電子系統、遙控數據處理。Email:ttjolly@126.com。
(編輯:夏光)
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
